微小衛星推力器姿軌一體化控制技術研究
2022-12-03 16:38:14劉燎吳愛國孫華苗魏世隆謝成清
上海航天 2022年5期
劉燎,吳愛國,孫華苗,魏世隆,謝成清
(1.哈爾濱工業大學(深圳)機電工程與自動化學院,廣東 深圳 518055;2.深圳航天東方紅衛星有限公司,廣東 深圳 518064)
0 引言
微衛星的質量一般在10~100 kg[1],其主要特點為質量小、體積小、制造發射成本低、功能針對性強,而現代微小衛星的發展特別需要輕量化、低功耗、小型化、集成化的部件[2]。推力器是航天器姿態和軌道控制中最常用的執行機構之一,它通過噴氣產生控制力來控制衛星的姿態和軌道。利用推力器控制衛星三軸姿態,要求推力器能夠產生6 個方向控制力矩[3],而單個方向控制時不對其他方向產生干擾,則至少需要安裝6 個推力器,如果同時考慮冗余還需要增加推力器的配置。但是,推力器數量增多會導致姿態控制系統復雜,同時也給整星的安裝帶來一定難度,尤其不適用于微小衛星,因為其對各個設備的質量、成本和功耗均有嚴格的限制。文獻[4-5]針對推力器構型和分配算法進行了研究,文獻[6]針對多推力器的衛星姿態控制問題,設計一種推力器分配算法,可有效減小推力器燃料的消耗。由于整星重量功耗的限制,推力器配置少必然會導致可靠性不佳;由于微小衛星一般壽命要求短,推力器的配置上暫不考慮推力器失效的情況,因此傳統的高冗余推力器配置方式不適用于微小衛星的配置。為了減小推力器的質量和體積,通常會減少推力器個數,同時提高微小衛星控制系統的功能密度,單個推力器能產生多個方向的控制力矩,這就會導致三通道控制力矩之間相互關聯,會引起三通道間推力器的局部耦合[7-9]。在布局耦合問題中,通常存在單個噴氣發動機開啟時能夠同時提供2 個或者3個通道的控制力矩,這種布局耦合使得微小衛星的姿態控制變得更加困難[10]。
針對微小衛星的特點以及姿態和軌道控制需求,本文設計了一套應用于三軸穩定微小衛星的姿軌一體化控制方案,采用星敏和陀螺的Kalman 濾波方案進行姿態確定,推力器采用斜裝的方式在軌道控制中兼顧三軸姿態控制。針對斜裝推力器噴氣導致的三軸耦合問題,采用基于傾斜開關線的相平面控制,按照X軸最優策略進行控制,該方案在滿足姿軌控的同時可實現姿軌控推力器的最小配置,減小了對飛輪角動量的需求,提高了控制系統的功能密度。
1 控制方案設計
衛星的控制系統由執行機構、敏感器和星載計算機組成,其中執行機構由推力器組成,敏感器由星敏和陀螺組成,星載計算機負責部件的通訊及控制指令的計算和生成,控制系統組成框圖如下圖1所示。
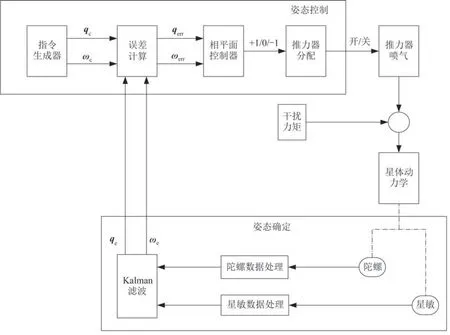
圖1 推力器姿態控制系統組成框圖Fig.1 Block diagram of the thruster attitude control system
星敏感器和陀螺分別敏感星體姿態和角速度信息,基于Kalman 濾波算法進行星體的姿態信息計算,得到星體的姿態四元數和角速度信息。星載計算機通過姿態信息和指令姿態信息生成姿態角和角速度誤差信息輸入相平面控制器,相平面控制器采用基于傾斜開關線的分區控制方式計算力矩狀態,根據推力器分配斜裝推力器的開關,并驅動相應的推力器進行噴氣,控制相應的星體軸姿態,完成星體的閉環控制。
1.1 姿態確定方案
敏感器選用陀螺和星敏,采用Kalman 濾波算法進行姿態確定,生成估計的姿態四元數qe和姿態角速度ωe,指令生成器根據任務要求升成參考姿態四元數qc和姿態角速度ωc,誤差姿態角θerr和誤差姿態角速度ωerr作為輸入提供給相平面控制器。每個軸通過相對獨立的相平面控制器進行控制,相平面控制器生成相應的選擇狀態:正力矩(+1)、零力矩(0)和負力矩(-1)。將選擇狀態轉化成相應的推力器開關指令驅動相應的推力器開關,從而完成星體的閉環控制[11]。其中誤差姿態角的計算公式如下:
1.2 推力器布局方案
執行機構由5個推力器配置組成,其中1個1.0 N推力器主要用來進行軌道控制,其他4 個0.2 N 推力器采用斜裝的安裝方式提供3 個方向的控制力矩,兼顧軌道和姿態控制,1.0 N 推力器安裝在-X面,能產生沿+X面的推力,4 個0.2 N(#1、#2、#3、#4)推力器也安裝在-X面,存在一定安裝角,在軌道控制中能產生+X面的推力,同時能產生三軸姿態控制力矩,其安裝示意圖如圖2 所示,圖中XYZ為星體坐標系。1.0 N 推力器進行軌道控制,4 個0.2 N推力器兼顧軌道控制和姿態控制,4 個小推力器采用關調制的形式工作,基于開關線的相平面控制器保持軌道機動中的姿態[12-15]。
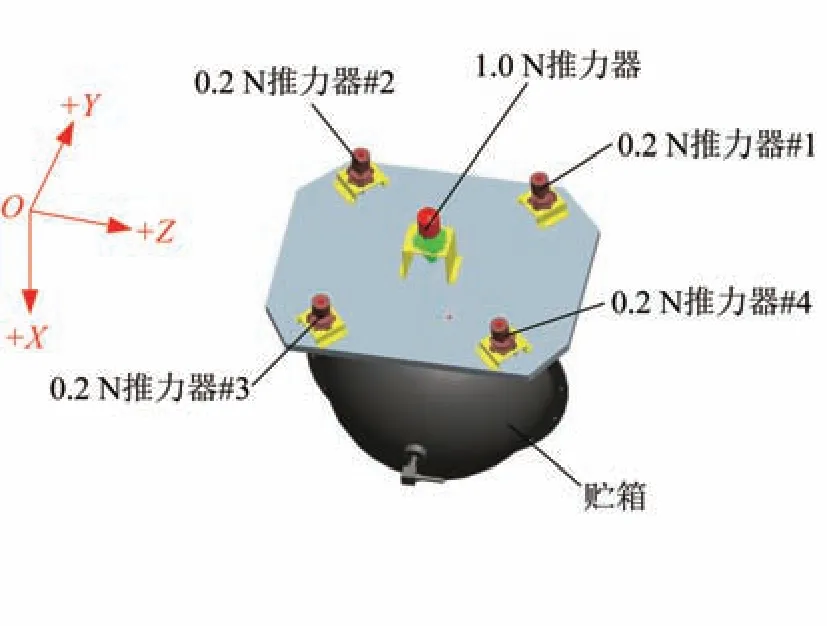
圖2 推力器安裝示意圖Fig.2 Schematic diagram of thruster installation
推力器產生的推力矢量和力矩矢量在衛星星體坐標系中的坐標見表1。
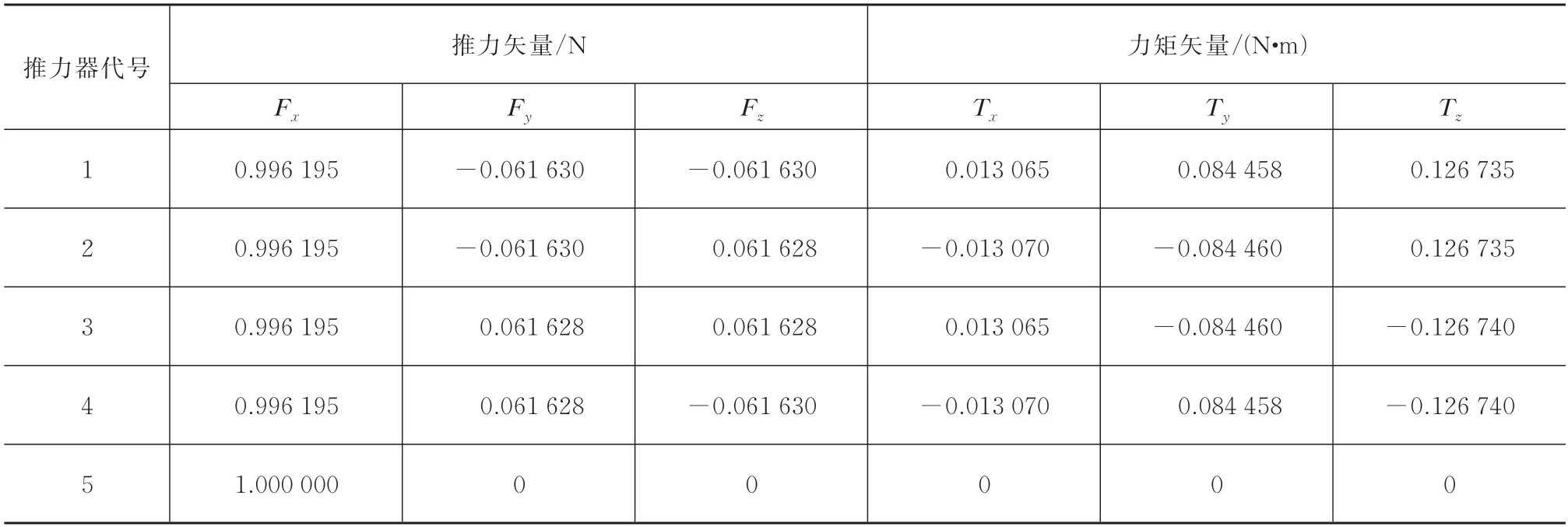
表1 推力矢量和力矩矢量Tab.1 Thrust vectors and torque vectors
采用推力器進行姿態控制經常采用2 種工作模式:開調制和關調制,其中開調制主要用來進行正常的三軸姿態機動,關調制主要用來進行軌道控制中的三軸姿態維持。
本文暫不考慮采用開調制進行姿態機動,只對軌道控制的關調制進行分析,其中1.0 N 推力器為軌控推力器,軌控過程中為全開狀態,4 個0.2 N 推力器兼顧軌道控制和姿態控制。
1.3 推力器控制方案
推力器的分配原則為:根據開關相平面控制器得出的三軸指令力矩后,按照X軸優先級最低的原則進行推力器的分配,即在推力器的分配中優先保證推力器組合產生的控制力矩能滿足Y軸和Z軸的期望力矩。
由于推力器安裝在-X軸,+X軸控制力矩偏差引起的滾轉角偏差不會影響軌道控制效果。基于開關線的相平面如圖3 所示,將相平面分為Ⅰ區:正向力矩全開區;Ⅱ區:正向力矩半開區;Ⅲ區:負向力矩半開區;Ⅳ區:負向力矩全開區;Ⅴ區:停控區。圖中:±RS、±RV、±R1、±R2、l1、l2、l3、l4為開關線分界線;±AD、±AB為角度判斷閾值。
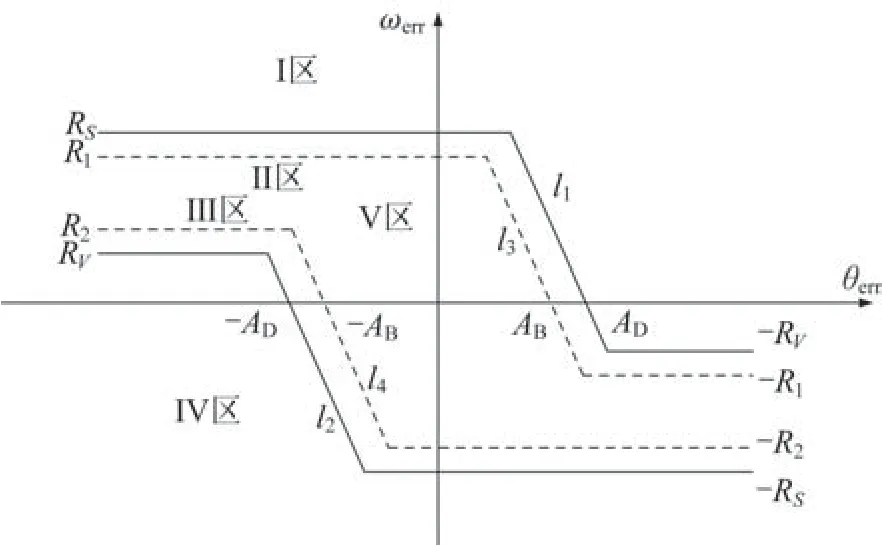
圖3 基于開關線的相平面Fig.3 Phase plane based on the switching lines
對于三軸開關狀態[+10 -1]總共有27 種組合模式(3×3×3=27),按照上述分配原則,根據相平面控制器得出的三軸開關狀態。例如:對于序號2,三軸指令狀態為[0 1 1],結合表1 推力器產生的力矩矢量,優先滿足Y軸和Z軸的期望力矩狀態,按照燃料消耗最小原則,只開推力器1,滿足Y軸和Z軸力矩狀態。按照此分配原則得出的推力器開關形式見表2。
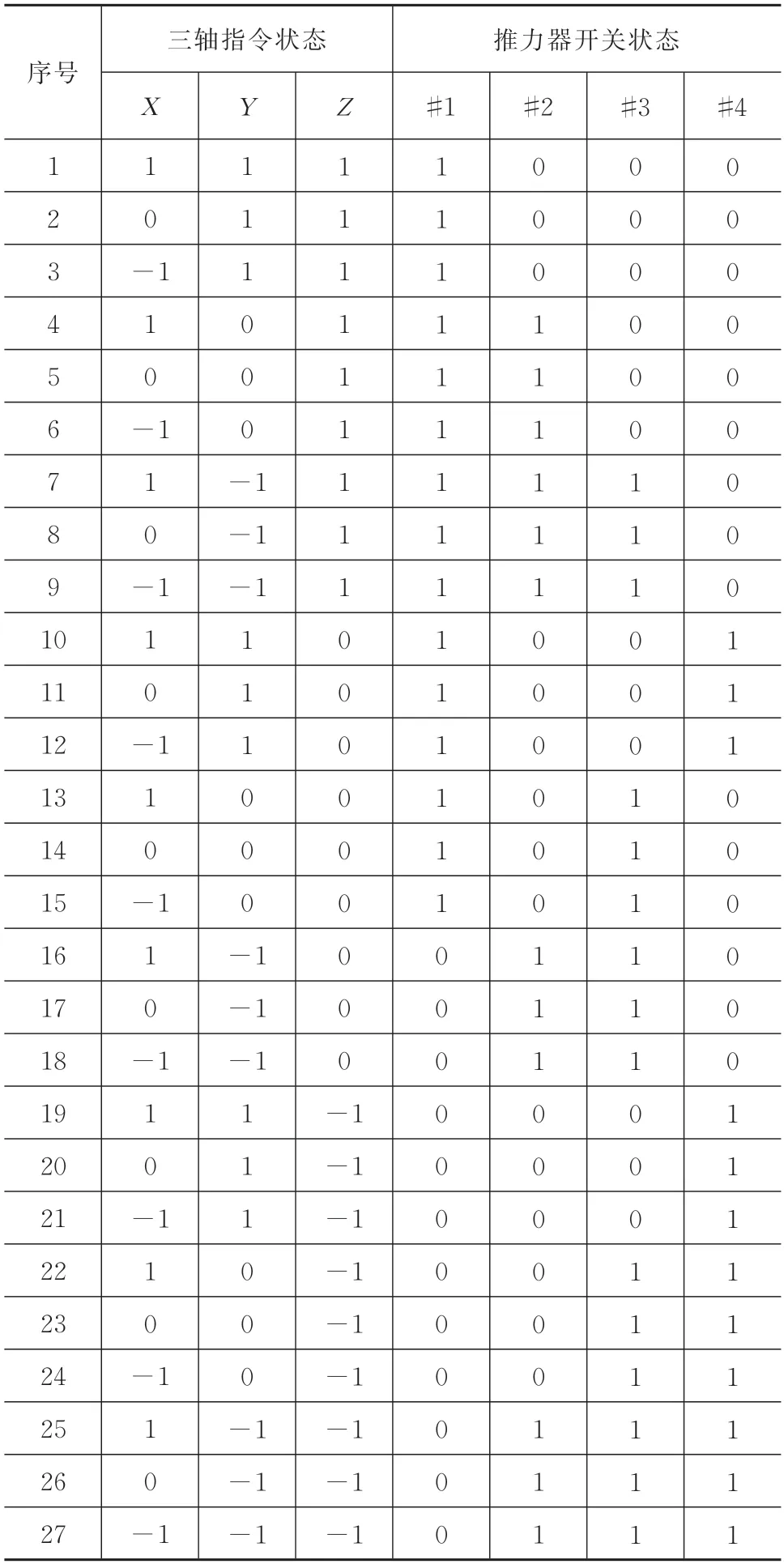
表2 推力器開關狀態Tab.2 Thruster switch status
2 實例驗證
仿真參數:軌道類型,圓軌道;軌道高度,500 km;軌道傾角,98.2°;軌道偏心率,0;升交點赤經,0;發射時間,2020 年1 月1 日,衛星質量,50 kg;推進劑類型,無水肼。
仿真條件:衛星12 500 s 時根據指令從對地定向模式進入軌道機動模式,開始軌道控制;仿真過程歷時1 300 s,其中前500 s 用于軌道機動前的姿態調整,使推力器推力方向沿衛星在軌前進方向,后800 s 完成軌道機動控制,即軌控開機時長800 s,5 個推力器同時工作;推力器方向安裝偏差為0.3°(3σ),位置偏心3 mm,0.2 N 推力器比沖為1 862 N.s/kg(190 s),1.0 N 推力器比沖1 960 N.s/kg(200 s)。仿真曲線如圖4~圖7 所示,每周期推力器指令開啟時間設為0.05 s。
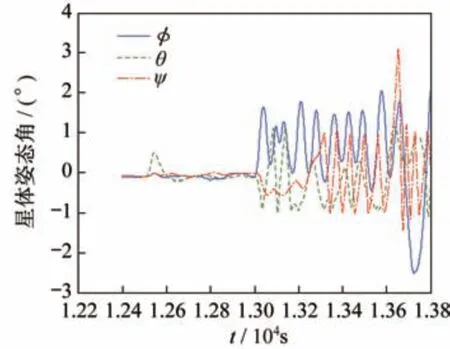
圖4 衛星姿態角時間曲線Fig.4 Time curves of the satellite attitude angles
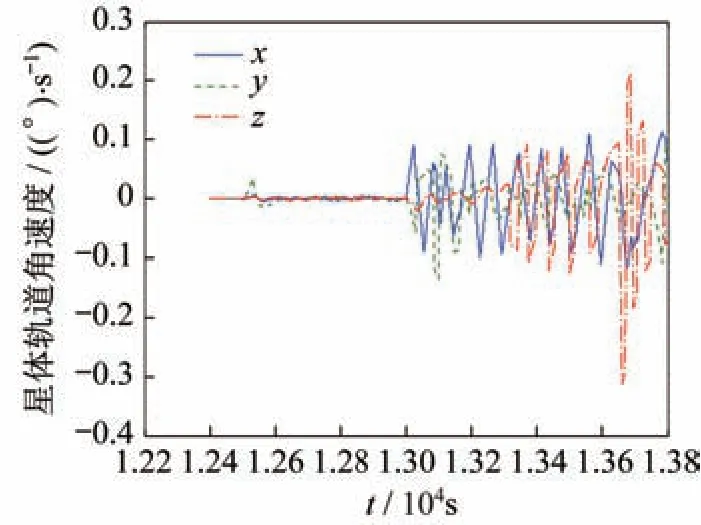
圖5 衛星軌道角速度時間曲線Fig.5 Time curves of the satellite attitude angular velocities
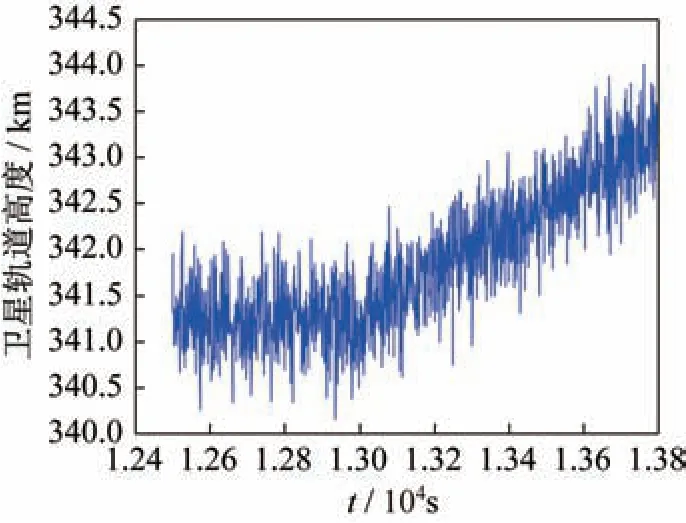
圖6 衛星軌道高度時間曲線Fig.6 Time curve of the orbit height
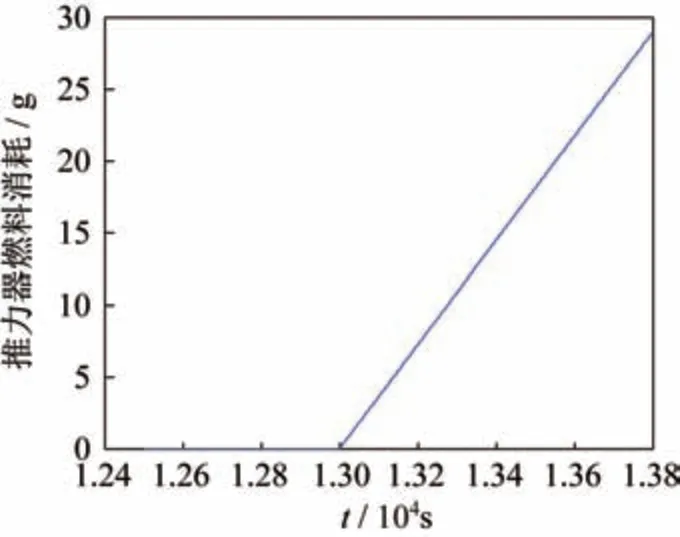
圖7 燃料消耗時間曲線Fig.7 Time curve of fuel consumption
仿真結果表明:在軌控過程中三軸姿態角最大偏差可達3°,滾動角速度最大偏差可達0.3(°)/s,在800 s 內,軌道高度升高了2 km,推進劑消耗了28 g,能夠正常進行軌道控制。XYZ軸相平面曲線如圖8~圖10 所示。
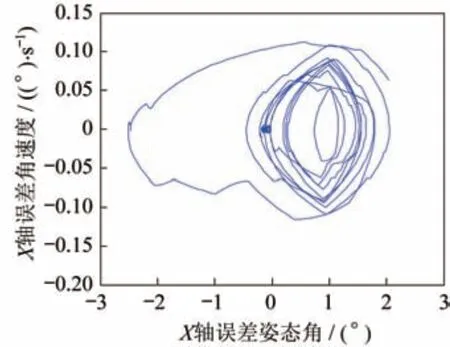
圖8 X 軸相平面曲線Fig.8 Phase plane curve of the X-axis
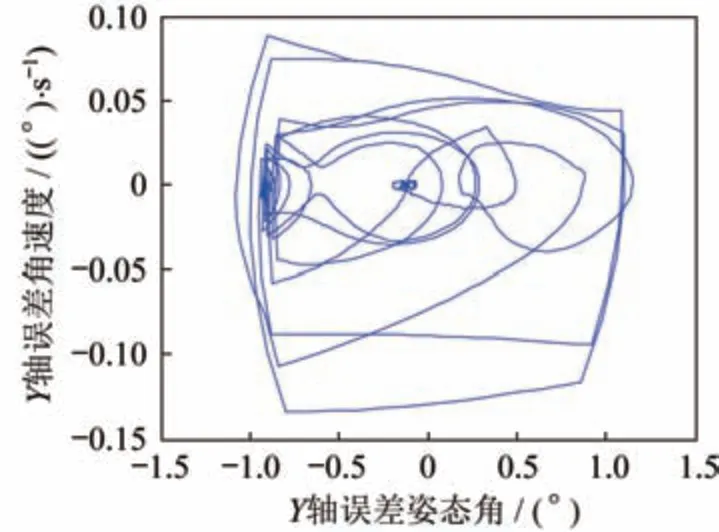
圖9 Y 軸相平面曲線Fig.9 Phase-plane curve of the Y-axis
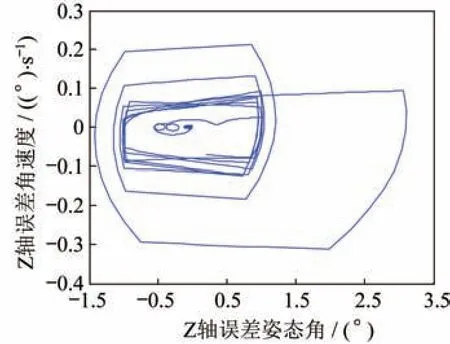
圖10 Z 軸相平面曲線Fig.10 Pphase plane curve of the Z-axis
仿真結果表明:在軌道控制期間,誤差姿態角和誤差姿態角速度組成的相平面曲線為一閉合曲線,姿態控制處于收斂狀態,衛星三軸姿態能夠滿足軌道機動的需求。
3 結束語
本文對微小衛星基于推力器的姿軌控一體化控制方案進行了研究,主要對推力器的安裝方式進行分析,研究了斜裝推力器在軌控過程中姿態保持的控制方法,采用基于開關線的相平面方法進行控制,根據XYZ軸力矩的正負,按照X軸優先級最低的策略對推力器開關進行分配,同時對某仿真條件下的衛星軌控進行了仿真。本文的控制方案能夠顯著提高控制系統的功能密度,但是未考慮推力器失效的情況,如何在增加最少推力器的情況下顯著提高控制系統的可靠性可作為下一步研究內容。
后續還可以利用基于力矩分配的控制方法進行斜裝推力器控制,主要的原理是:4 個推力器力矩矢量以衛星質心為原點將指令空間分為4 個區域,每個區域都由3 個推力器力矩矢量定義的3 個面界定,任意一個控制力矩矢量只可能位于這4 個空間區域的其中一個,并且僅由定義該區域的正力矩分量表示,即控制力矩矢量,可以僅采用3 個推力器實現,且保證其工作時間為正值。
