輸電線路工程三繩索吊升張力控制技術研究
2022-11-08 06:27:36周威宋澤明胡春華何成郝玉靖
中國工程機械學報 2022年5期
關鍵詞:模型
周威,宋澤明,胡春華,何成,郝玉靖
(1.中國電力科學研究院有限公司,北京 100192;2.國網新疆電力有限公司電力科學研究院,新疆 烏魯木齊 830011)
傳統輸電線路組塔施工中多采用落地平臂及搖臂抱桿[1-3]或流動式起重機[4-5]進行作業,組塔施工過程中的物料[6-8](如電動扭矩扳手、螺栓緊固件、組塔輔材)吊升,一般是將起吊繩索繞過抱桿頂部的起重滑車后,地面人員操控機動絞磨牽拉繩索進行起吊,起吊過程中輔以人力牽拉纜風繩對被吊物吊升姿態進行控制[9-10]。起吊過程中被吊物受風力及自身慣性作用,運動軌跡及吊升位置無法被精確控制,被吊物與鐵塔可能發生碰撞從而掉落或受損,導致安全事故的發生。為解決上述問題,降低環境、人為因素在作業中的不良影響,研制專用的自動吊升裝置就顯得十分必要。基于電力施工中張力放線作業施工工藝[11-13],提出了一種電力組塔施工用貨物三繩索吊升張力控制方法。建立了三繩索吊升張力控制力學模型,通過該模型可計算不同質量貨物在不同吊升高度下繩索張力值;采用伺服控制[14-15]方式,搭建了三繩索吊升伺服張力控制系統,通過將理論計算得到繩索張力值輸入到伺服控制系統中,可精確控制被吊物吊升軌跡及位置,保證了物料的安全起吊。
1 三繩索吊升張力控制原理
三繩索吊升張力控制系統工作原理如圖1所示,定滑輪(作業現場為起重滑車)安裝在電力鐵塔主塔腿頂部,吊升裝置主要由中間伺服張力起吊裝置及左右兩側伺服張力牽拉裝置組成。中間伺服張力起吊裝置繩索繞過頂部定滑輪與吊升貨物相連,連接位置位于被吊物上端;左右兩側伺服張力牽拉裝置繩索對稱分布,固定于吊升貨物下端兩側,吊升過程中左右兩側繩索張力牽拉使得貨物脫離主塔腿,防止吊升過程中貨物與電力鐵塔發生碰撞。
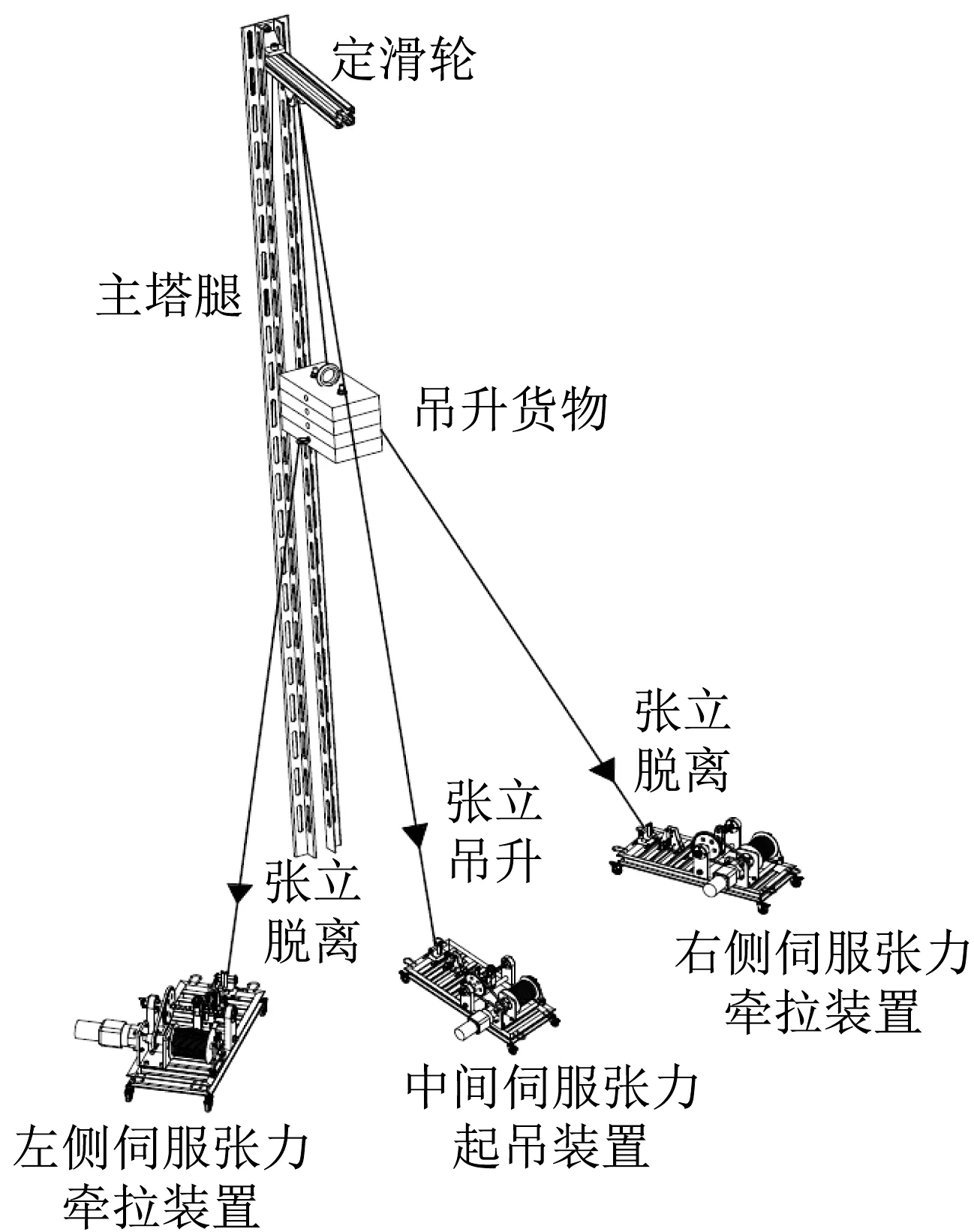
圖1 三繩索吊升系統組成Fig.1 Composition of three rope hoisting system
2 三繩索吊升力學模型
2.1 模型建立
以新疆750 kV輸電工程ZGU1型雙回路直線鼓型角鋼塔(2053B號)為例,建立三繩索吊升力學模型,如圖2所示。定滑輪位于電力鐵塔主塔腿頂部,主塔腿長度S=80 m,主塔腿與地面垂線夾角θ=6.3°,以主塔腿頂部垂向地面作z軸,建立如圖2所示坐標系xyz。
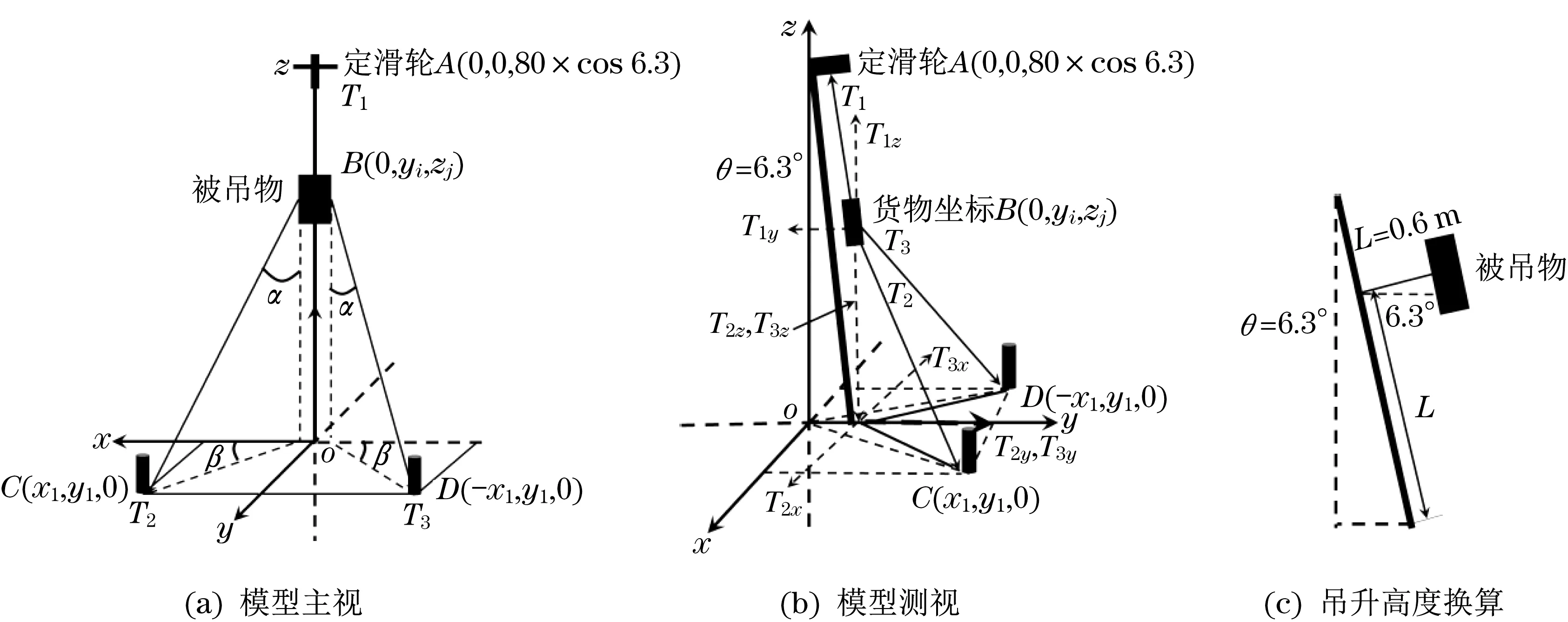
圖2 三繩索吊升力學模型Fig.2 Three rope hoisting mechanical model
中間伺服張力起吊裝置繩索張力為T1,左右兩側伺服張力牽拉裝置繩索張力為T2、T3。T1由地面繞過定滑輪主要起到吊升作用;T2、T3位于地面左右兩側對稱位置,張力方向由被吊物指向地面伺服張力牽拉裝置,通過T2、T3向外側牽拉被吊物使其在吊升過程中脫離主塔腿一定的位移,避免貨物在起吊過程中與主塔腿發生碰撞,同時三繩索張力牽拉使得貨物產生一定剛度,能夠抵御外部環境載荷對吊物產生擾動。
吊升過程中,假定貨物質心與主塔腿脫塔距離始終保持恒定l=0.6 m,即貨物吊升運動軌跡與主塔腿平行。定滑輪坐標A(0,0,80×cos 6.3),貨物坐標B(0,yj,zj),T2對應C點坐標(x1,y1,0),T3對應D點坐標(-x1,y1,0),L為吊升過程中地面到貨物在主塔腿上的投影長度。
2.2 模型求解
假定吊升過程中貨物質心始終與傾斜主塔腿距離保持在l=0.6 m,則貨物坐標(0,yj,zj)可表示為:yj=(80-L)·sin 6.3+l·cos 6.3,zj=L·cos 6.3+l·sin 6.3。對T1、T2、T3分別沿x、y、z3個方向進行分解,假定T1位于yz平面且力的方向與主塔腿平行,沿y軸及z軸方向分力如下:

式中:θ為主塔腿與地面垂線夾角。T2沿x軸、y軸、z軸3個方向分力如下:
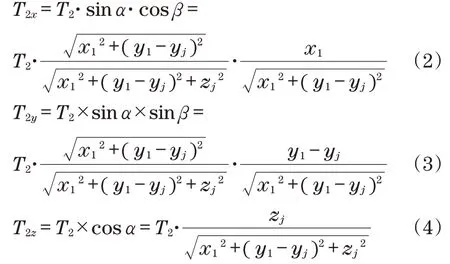
T2與T3對稱分布且張力值相同,故T3在x軸、y軸、z軸3個方向分力值與T2在x軸、y軸、z軸3個方向分力值大小相同。其中T2x與T3x大小相等方向相反,T2y與T3y大小相等方向相同,T2z與T3z大小相等方向相同。T1牽拉裝置位于y軸上,T2與T3位于xy平面且對稱分布,如圖3所示,則|x1|=R·cosγ,|y1|=R·sinγ。
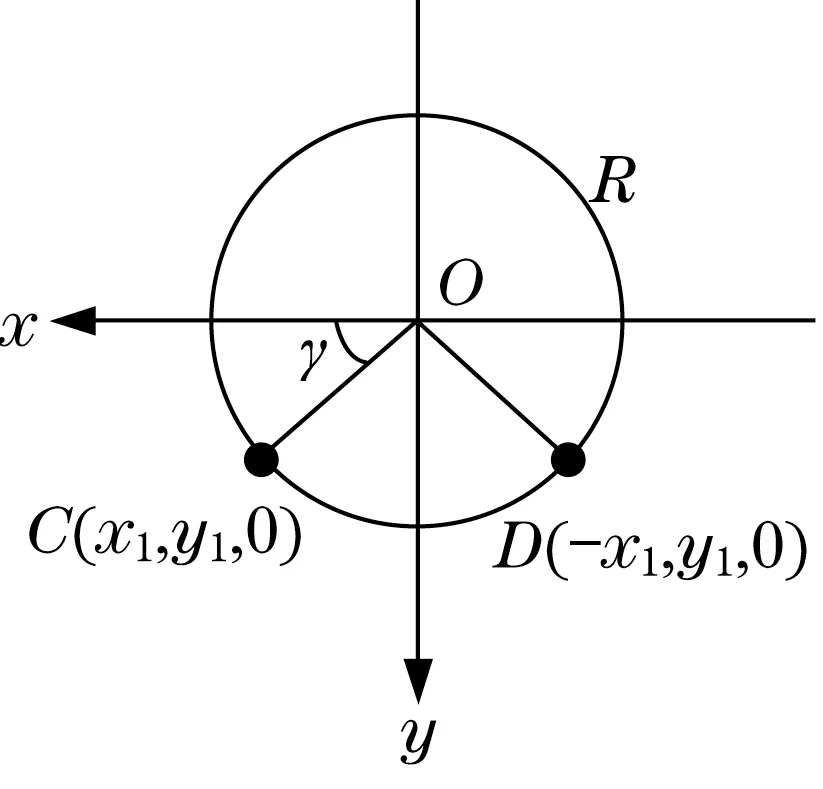
圖3 地面位置坐標Fig.3 Position coordinates on the ground
由上述可知,建立貨物吊升過程中動態平衡方程如下:

式中:G為貨物重力;m為貨物質量;a為吊升過程貨物加速度。
2.3 模型計算
T1對應起吊裝置位于y軸即可,在主塔腿長度S一定時,勻速吊升過程中T1、T2、T3力值主要與地面裝置安裝半徑R、安裝角度γ、脫塔距離l、貨物質量m相關聯。在上述4個可變參數中選取1個為自變量,其余3個參數保持不變,通過在Matlab中構建方程組獲得T1、T2、T3力值與可變參數關系。
假定安裝角度γ=45°,貨物質量m=100 kg,貨物脫離主塔腿距離l=0.6 m。且R·sinγ>S·sinθ,即安裝位置在y軸坐標大于主塔腿在y軸上投影坐標,則R>12.4 m。當安裝半徑R分別選取20 m、30 m、40 m、50 m時,T1、T2、T3力值分布如圖4所示,伴隨L增加三繩索張力值T均呈現單調遞增趨勢,伴隨半徑R增加,T1、T2、T3張力值均呈現減小。
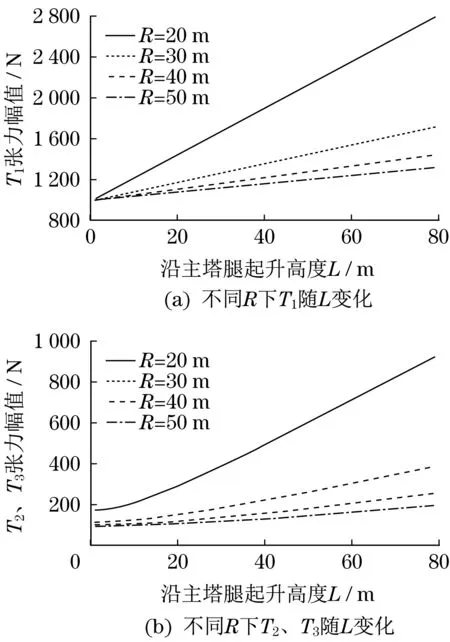
圖4 不同R下T1、T2、T3隨L變化Fig.4 Variation of T1,T2,T3 with L under different R
假設安裝半徑R=30 m,貨物質量m=100 kg,貨物脫離主塔腿距離l=0.6 m,R·sinγ>S·sinθ,則90°>γ>17°。當安裝角度γ分別選取30°、45°、60°、75°時,T1、T2、T3力值分布如圖5所示,伴隨L增加三繩索張力值T呈現單調遞增趨勢,伴隨安裝角度γ增加,T1、T2、T3張力值均呈現減小。
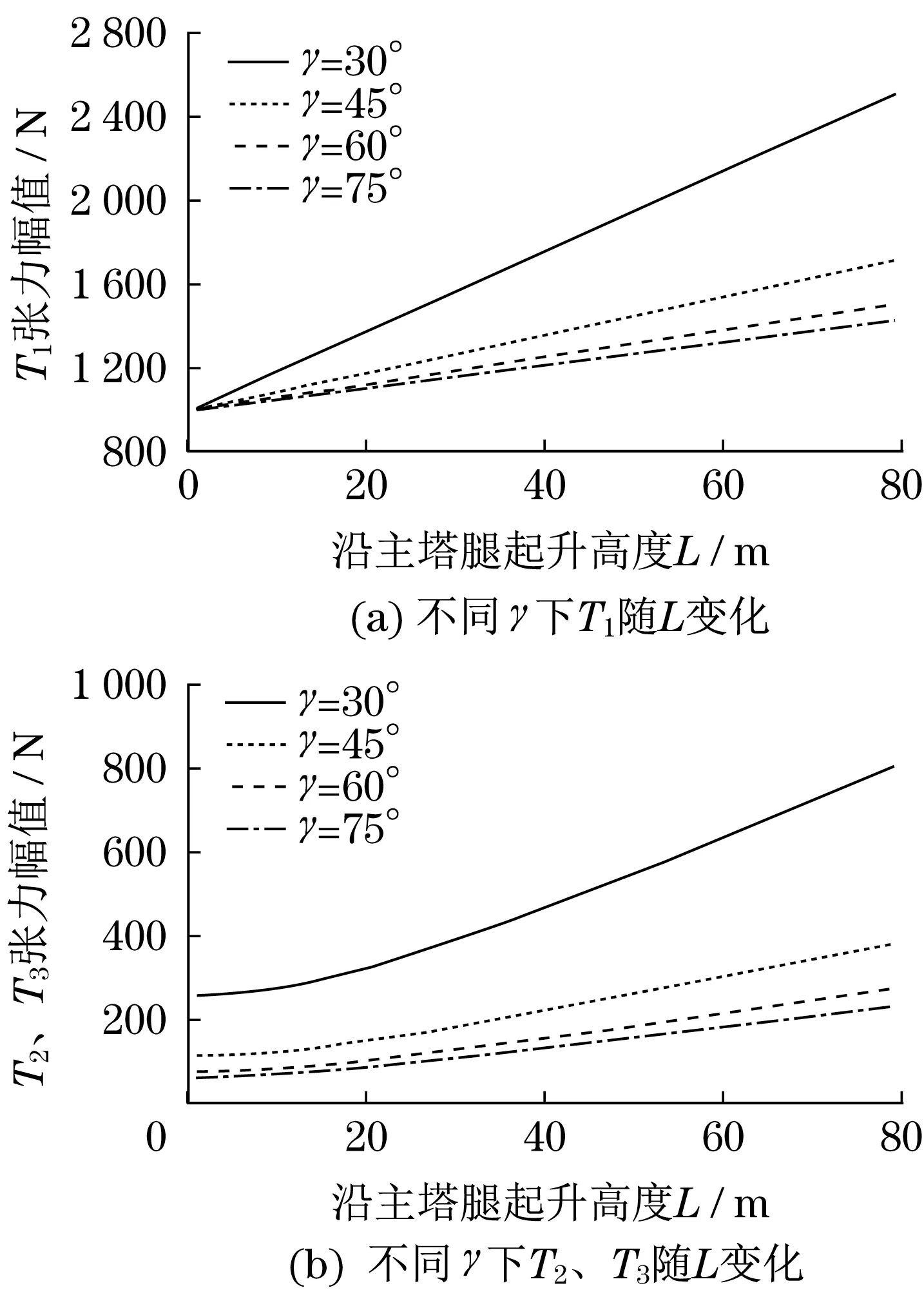
圖5 不同γ下T1、T2、T3隨L變化Fig.5 Variation of T1,T2,T3 with L under different γ
假設安裝半徑R=30 m,安裝角度γ=45°,貨物質量m=100 kg。當貨物脫離主塔腿距離l選取0.6 m、1.0 m、1.4 m、1.8 m時,T1、T2、T3力值分布如圖6所示,伴隨L增加三繩索張力值T均呈現單調遞增趨勢,伴隨脫塔距離l增加,T1、T2、T3張力值均增大,增大幅值較小,表明較小張力值增加可以產生較大的脫塔距離。
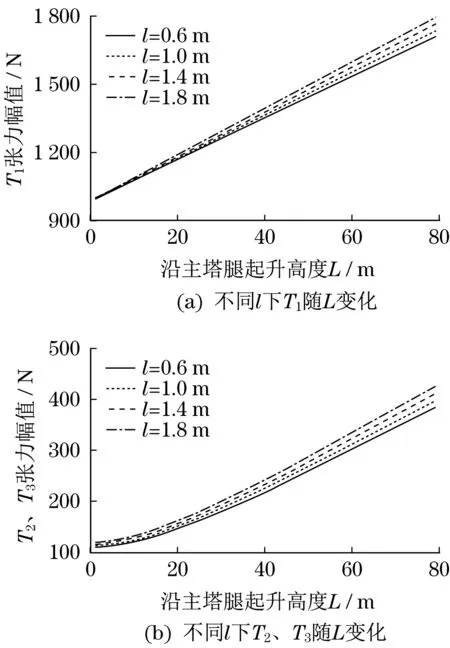
圖6 不同l下T1、T2、T3隨L變化Fig.6 Variation of T1,T2,T3 with L under different l
假設安裝半徑R=30 m,安裝角度γ=45°,貨物脫離主塔腿距離l=0.6 m。當貨物質量m選取100 kg、200 kg、300 kg、400 kg時,T1、T2、T3力值分布如圖7所示,伴隨L增加三繩索張力值T均呈現單調遞增趨勢,伴隨著貨物質量m增大,T1、T2、T3幅值等比增大。
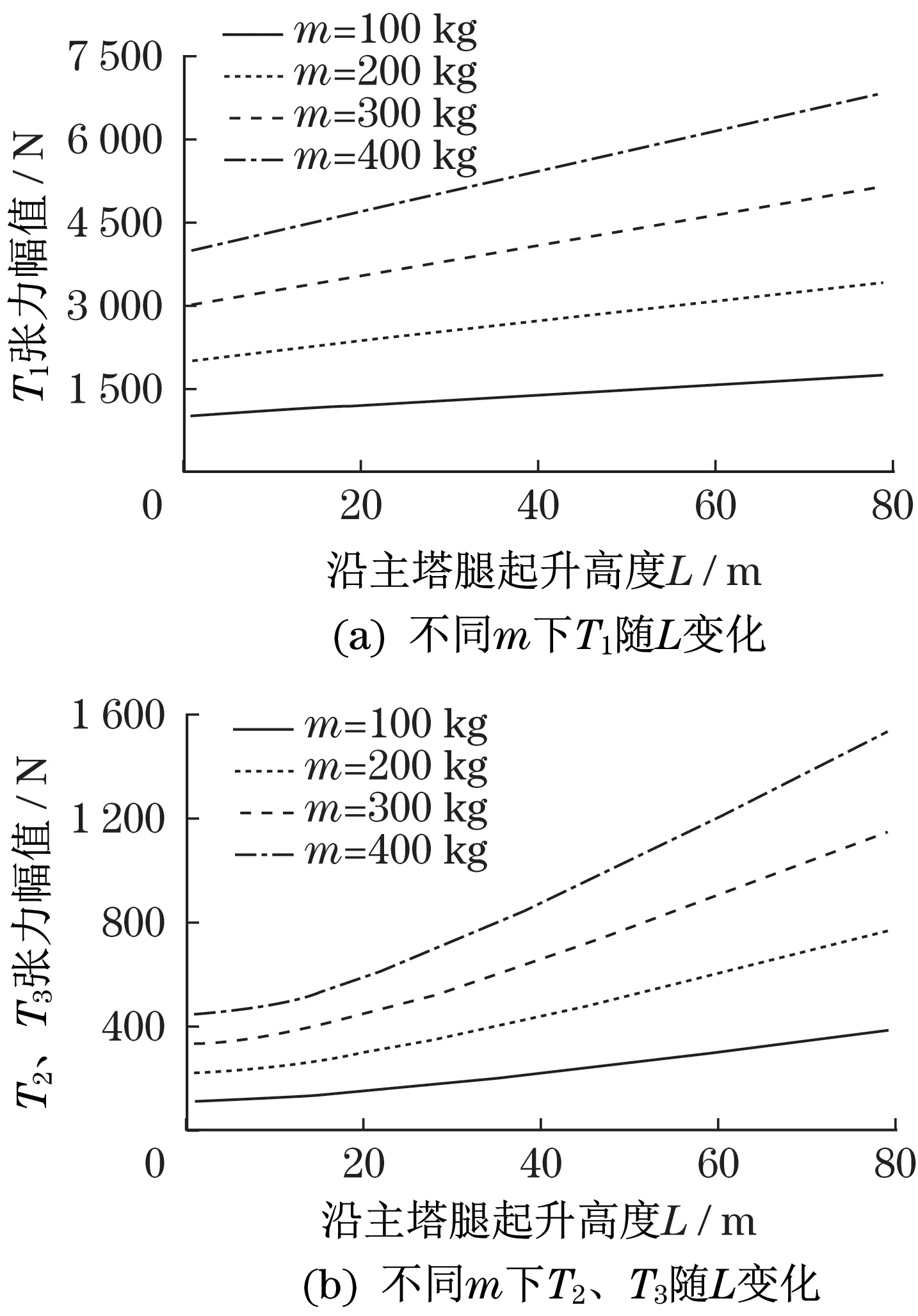
圖7 不同m下T1、T2、T3隨L變化Fig.7 Variation of T1,T2,T3 with L under different m
通過上述分析可知,任意工況下三繩索張力值T隨著L的增加而增大,若保持貨物吊升過程中脫塔距離l不變,當被吊物質量m、安裝半徑R、安裝角度γ不同時,繩索張力值T均不同。當確定脫塔距離l后,不同質量m及不同安裝半徑R、安裝角度γ下繩索張力值T隨L的變化均可通過力學模型進行求解,該力學模型所求得的三繩索張力值T可作為伺服控制系統張力輸入值。
3 試驗驗證
基于所建立的力學模型,搭建了三繩索吊升張力控制系統,并進行了室內試驗驗證。試驗系統主要由中間伺服張力起吊裝置、左右伺服張力牽拉裝置、伺服張力控制柜、被吊物等組成。
室內吊升試驗中,頂部定滑輪離地高度S=8 m,被吊箱體質量m=90 kg,頂部定滑輪與地面垂線夾角θ=6.3°的鉛線作為脫塔基準,裝置安裝半徑R=4.15 m,安裝角度γ=45°,脫塔距離l=0.3 m。將上述參數代入到已建立的理論力學模型中進行計算,得到的T1、T2、T3數值如圖8所示。將計算所得到的T1、T2、T3張力值通過人機操作控制界面進行輸入,被吊物吊升過程位姿如圖9所示。通過吊升試驗可知,在整個起吊過程中,起吊及牽拉繩索張力值、被吊物作業位置及姿態與理論設定值保持一致,證明本文設計的三繩索吊升張力控制方法可靠,可進一步開展工程應用。
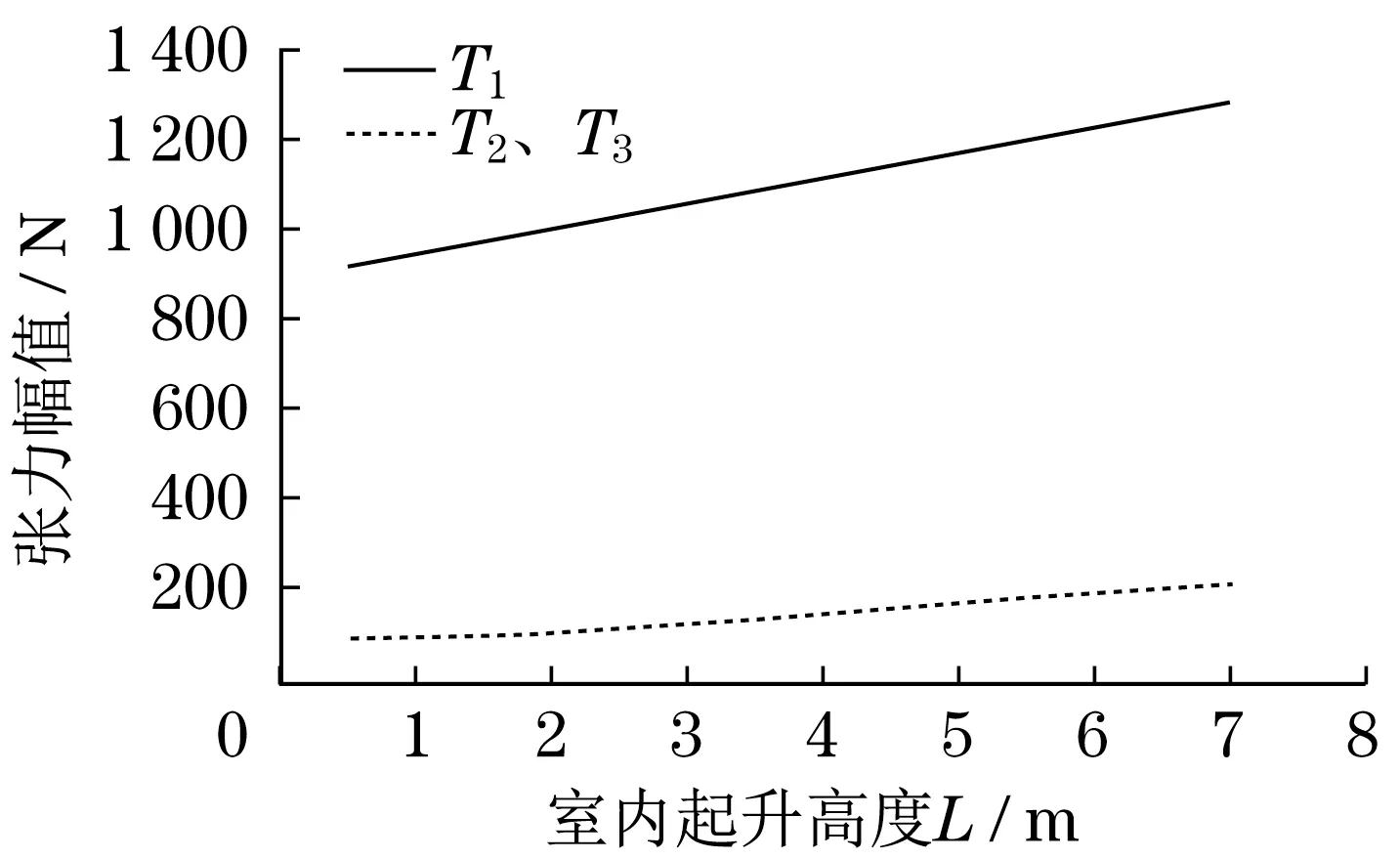
圖8 模型計算張力值Fig.8 Tension value calculated by mechanical model
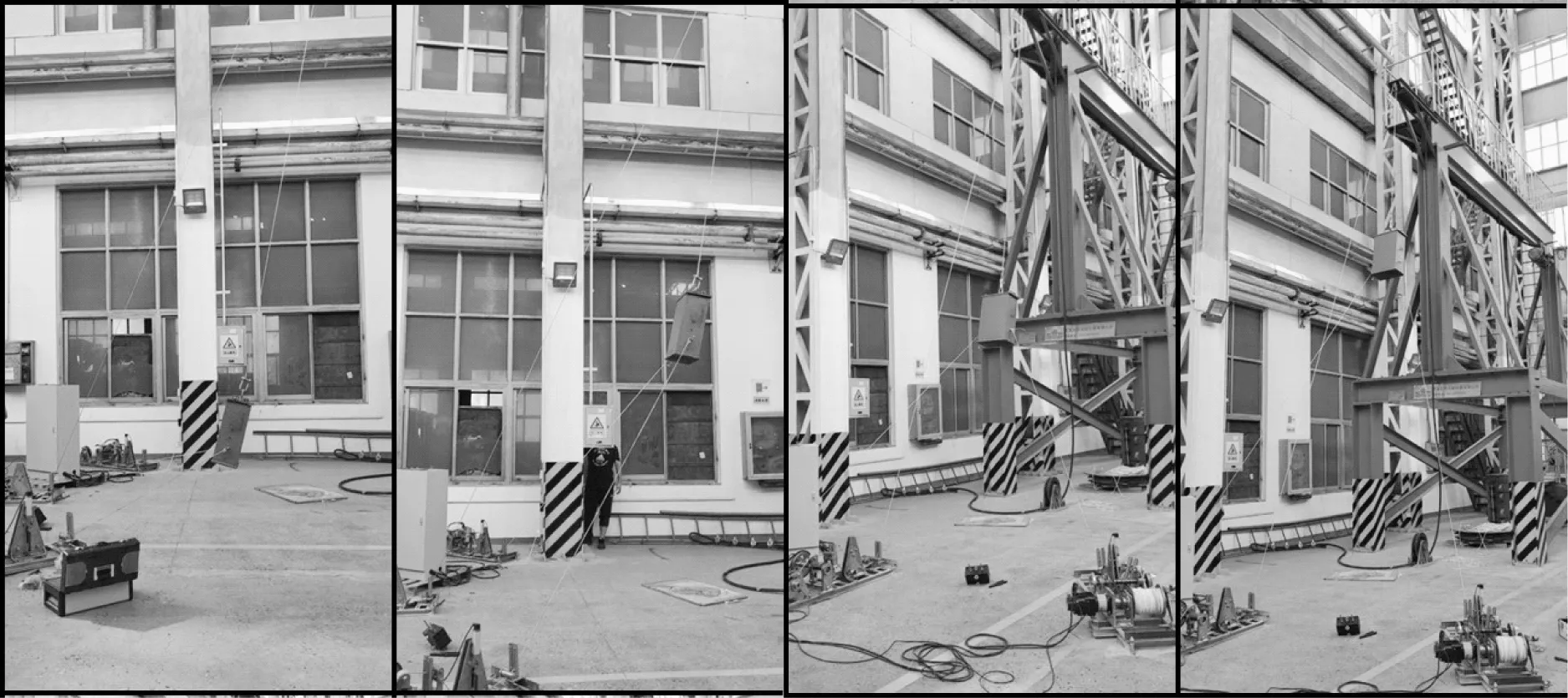
圖9 三繩索吊升室內試驗Fig.9 Three rope hoisting laboratory experiment
4 結論
(1)設計了一種輸電線路組塔施工用三繩索吊升張力控制系統,該系統采用伺服控制模式,繩索張力值可根據被吊物質量及現場實際工況,在控制系統中進行設定,該系統保證了被吊物吊升過程中具有安全脫塔距離,實現了小型電力施工機具及材料吊升作業的自動化。
(2)基于張力控制原理,建立了三繩索吊升力學模型,不同質量貨物在不同工況下的繩索張力值可通過該模型進行計算,計算值可保證被吊物按照預定軌跡進行吊升。
(3)基于理論及試驗研究證實,本文設計的三繩索吊升張力控制方法,在貨物吊升過程中其吊升軌跡及作業位置可控,電力組塔施工作業安全性得到提高,使得組塔施工作業更加智能化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19