研發亞厘米級機器人重約二點二克
2022-10-13 09:54:00
海外星云 2022年16期
關鍵詞:檢測

亞厘米級管道機器人
為確保飛機發動機和煉油廠設備等復雜系統能夠安全運行,需要時常對其管路進行檢查。
值得注意的是,須檢查管道的直徑有幾毫米到幾十厘米不等。現有管道機器人大都采用電磁電機和齒輪傳動系統,包括輪式、行走式、履帶式等各種機器人,較適合檢測大直徑管道,而當管道直徑小于1厘米時,此類機器人的尺寸若想進一步縮小就比較困難,適用性就會大打折扣。
近日,來自清華大學機械工程系現代機構學與機器人化裝備實驗室的科學家,開發了一款可用于亞厘米(1厘米~0.1厘米之間)級管道檢測的機器人,重量只有2.2克,直徑小于1厘米,長4.7厘米。
本研究成果在一定程度上彌補了微小管道檢測領域的不足。
相關論文以《一種用于亞厘米尺度管狀環境導航的管道檢測機器人》為題發表。清華大學機械工程系博士后湯超為論文第一作者,通訊作者為該系副教授趙慧嬋。
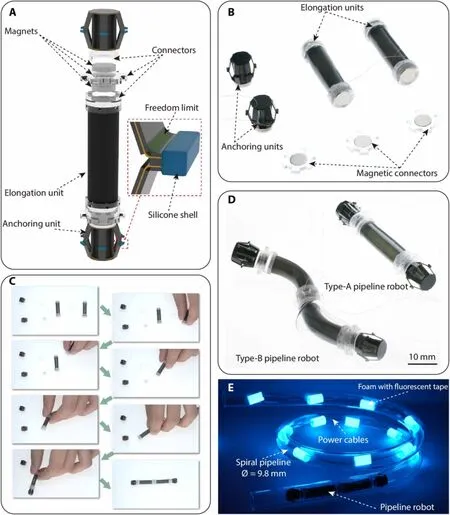
亞厘米級管道機器人的設計和裝配
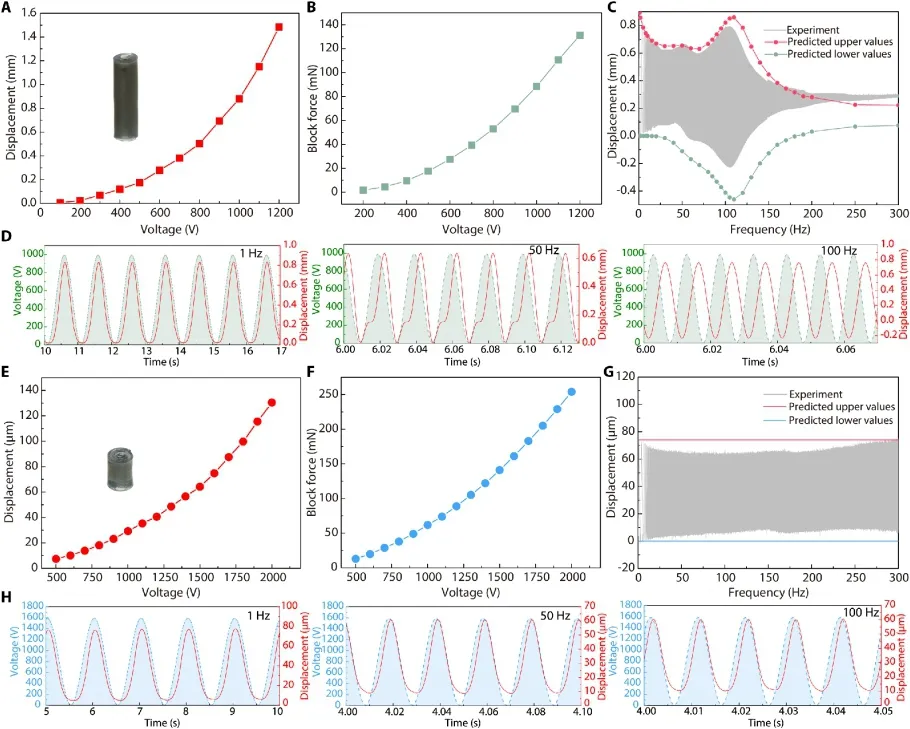
介電彈性體致動器機械性能的表征
據了解,該亞厘米尺度檢測機器人采用了智能驅動材料介電彈性體致動器作為人造肌肉。
與小體積的電磁電機相比,介電彈性體致動器具有更高的功率,更有可能被擴展到小尺寸,從實踐來說,其目前已被嘗試應用于小型移動機器人上。該工作所采用的介電彈性體致動器還有著較長的使用壽命和較快的響應速度,因此在管道運動方面表現出獨特的優勢。
在小型管道中,機器人和管壁之間需要有可靠的相互作用,設計一個軟機器人來實現敏捷的導航和有效的檢查有著其必要性。
目前,由于一些管道環境(彎曲且含填充介質)較為復雜,此類管道檢查任務仍然面臨挑戰。
其中一個挑戰來自于機器人驅動方法的選擇。比如氣動驅動軟機器人,其通常靠加壓空氣的傳質來驅動,這對長距離管道檢查不利,機器人速度會大大減慢。
而DEAs依賴于電荷的轉移進行驅動,因此具有更高的功率密度,在小型管道檢測機器人制作上有著巨大潛力。

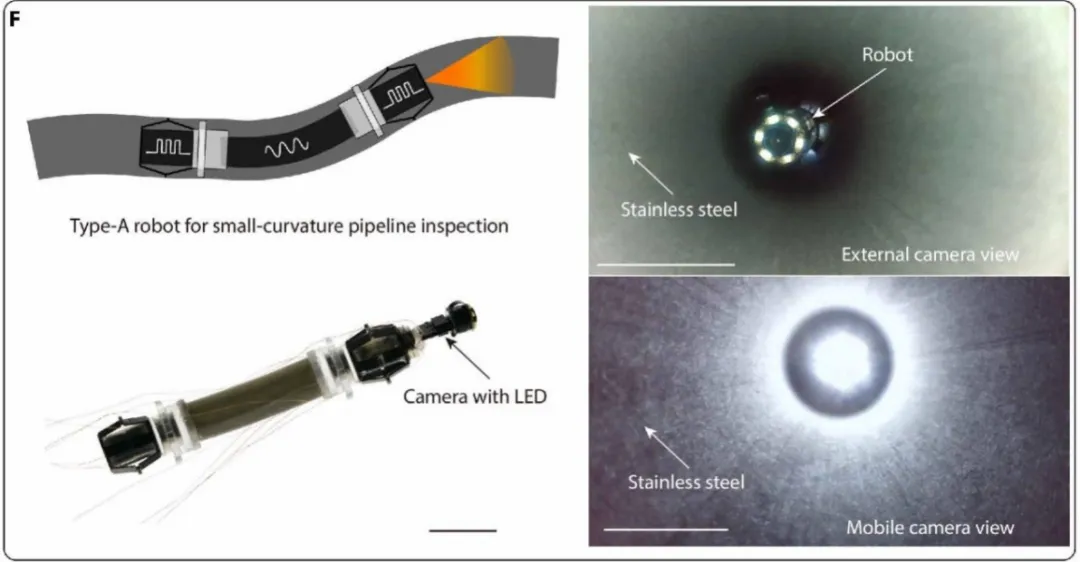
安裝攝像頭的機器人在不銹鋼管中檢查環境的圖像
另外,為驗證該機器人的真實管道檢查能力,研究人員在該機器人前面安裝了微型攝像機來觀察管道內的情形。在人工控制下,它以不同速度成功完成了所安排的檢查任務。
“同時,我們研發的亞厘米尺度機器人能夠在S形、螺旋形等不同幾何形狀的管道中移動,即使管道中含有油、氣體等介質也運行良好。它還適用于玻璃、金屬或碳纖維等不同管道材質。”湯超說道。

湯超
據了解,為了能夠在不同形狀的管道中高效、快速移動,該軟機器人能通過可變數量的磁單元實現快速裝配。由于構成機器人的低模量材料具有較高的自由度,因此可以被動地適應管道尺寸和形狀的變化。
另一個挑戰是設計和制造機器人的本體結構,以實現在小型管道中的高效運動。可拿軟體動物和哺乳動物做個類比,哺乳動物進化出了剛性支撐的骨骼結構以及用于軟驅動的肌肉,極大地提高了它們的運動能力。
相比于純軟機器人設計,剛性組件的引入也可以大大提高機器人的運動性能。此次研發機器人的錨定單元基于智能復合材料微結構(SCM)技術,該技術能夠克服微機械加工技術的局限性,已經在微型機器人的結構設計中得到了廣泛應用。
“在這項工作中,機器人的運動原理受到了蚯蚓蠕動行為的啟發”。湯超補充說,“另外,考慮到管道檢測機器人的要求,SCM技術成為了設計和制造一個小型但具有有效力傳輸和移動能力的機器人的理想選擇。”
據悉,研究人員對機器人的動態特性做了建模和分析,對軟材料驅動的一些特殊特性(例如黏性、共振特性)進行了調控和利用,最終實現了機器人在亞厘米大小管道中各方向的快速運動。
總的來說,研究人員展示了一種使用智能材料來構建亞厘米直徑規模管道檢測機器人的可行性。且該機器人在管道直徑(特別是在亞厘米尺度上)、材料和填充介質的變化等方面具有更強的環境適應性。
在未來,研究人員還會探索更靈活、具有主動彎曲能力的驅動器。同時,由于目前機器人通過管道外部纜線供電,后續會將有線電纜取消,代以小型高壓電源和高能量密度電池,從而減小行進阻力進行更深入的管道探索。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
