電力多旋翼無人機巡檢控制系統的設計與實現
2022-10-12 05:58:56王俊平
機械設計與制造 2022年10期
關鍵詞:檢測
王俊平,徐 剛
(1.湖北職業技術學院機電工程學院,湖北 孝感 432000;2.湖北工程學院機械工程學院,湖北 孝感 432000)
1 引言
社會發展的特點之一是不斷增長的能源消費,特別是在經濟快速發展階段電力消費隨之增長。高壓輸電線路作為電力發電、輸電和配電的中間環節,對電網的整體性能有著重要的影響。電力機構為控制輸電過程的性能指標而采用的維修方法包括無人機、徒步巡檢、攀爬機器人以及有人駕駛飛行器。在徒步巡檢中,通常由兩個人組成的隊伍從一個塔走到另一個塔進行電線路檢查。目視的線路檢查是在雙筒望遠鏡的幫助下進行的,有時用紅外(IR)和探測相機進行檢查。該檢測手段非常準確,檢測人員可以從地面上很好地看到電力線設備的表面情況。但是考慮到全國的地形差異,穿越公路的人員流動輸電線路的巡邏并不容易。因此,傳統線路檢查存在緩慢、單調、主觀的缺陷。
四旋翼是一個四螺旋槳交叉配置的機電一體化系統。前后電機順時針旋轉時,左右電機逆時針旋轉,幾乎抵消了陀螺效應和調整飛行時的氣動動力力矩。與傳統直升機相比,四旋翼的另一個優點是簡化了旋翼力學。
通過改變單個電機的速度,可以改變升力,從而產生垂直和/或橫向運動。俯仰運動是由前后電機的速度差產生的,而橫搖運動則分別由左右轉子的速度差產生。偏航旋轉是由于每對轉子(前后和左右)的反力矩不同而產生的。總推力是四個單轉子產生的推力之和。所有的傳感器和信息處理單元都嵌入到四旋翼中用于控制目的,以實現無人機的自主操作。然而,盡管其有四個執行器,但四旋翼是一個動態不穩定的系統,必須由一個合適的控制系統來穩定。除了功能復雜性之外,算法還必須在嵌入式硬件中實現,并且必須滿足實時需求,同時必須考慮有限的內存和板載處理能力。許多控制系統是基于線性化模型和傳統的PID控制。
無人機(UAV)這一新興技術在電力線路檢測方面變得更加經濟實用。這里中提出了一種多平臺旋翼無人機系統和多模型通信系統,并將其用于中國高效的電力線檢測任務。對四旋翼無人機的力平衡、運動控制進行了詳細的介紹。不同的無人機協同工作,可實現遠程成像、近距離成像和通信中繼。將高質量的圖像/視頻實時傳輸到無人機導航現場控制站和遠端辦公室進行分析。根據三個節點法的溫度參數判斷其有無故障。事實證明:旋翼無人機檢測比傳統的檢測方法具有更高的效率。
2 電力旋翼無人機巡檢系統
2.1 系統機構特點
四旋翼無人機的運動是通過改變四個轉子產生的升力來控制的。與傳統四旋翼無人機不同,這種四旋翼無人機可以通過改變轉速、葉片迎角(俯仰角)和循環俯仰角來改變升力矢量的大小和方向。
螺距角是固定的,因為轉子是由柔性塑料制成,空氣阻力扭曲造成螺距角的變化。因此,升力是四個轉子轉速之和的函數,而轉矩是它們的差值的函數。四旋翼無人機有四個輸入力產生六個自由度的運動,且無線電控制器的操作人員有四個控制機構:油門(電機轉速)、橫搖、俯仰和偏航。
為了滿足電力線檢測的需要,從零開始研制了四旋翼,其組成成分為:微處理器、慣性測量單元(IMU)、GPS、自動駕駛儀、高度計和通信系統。根據任務模式不同,將四旋翼飛行控制器飛行執行模式分為手動飛行、GPS定位和GPS導航。
四旋翼無人機基本結構,其旋轉動力學滿足反饋形式,姿態控制器可以通過反推技術設計,如圖1所示。但是,該方案中解析虛擬控制變量的過程非常復雜,對反推技術的實際應用帶來阻礙。直接提取角速率微分命令信號的方法,能夠降低對分析模型的依賴。利用姿態控制器可以降低信號擾動誤差,確保四翼無人機具有較好的跟蹤能力。

圖1 四旋翼無人機結構Fig.1 The Quadrotor UAV Structure
2.2 電力旋翼巡檢
四旋翼機構是高度非線性的欠驅動系統,最佳模型包括推進組的旋轉以及空間旋轉帶來的陀螺效應。四旋翼動力學的方程可以在參考世界固定坐標系EE中表示為:


式中:XE=[x,y,z]T—四旋翼機器人的絕對位置和Θ=[ψ,θ,φ]T由歐拉角表示的姿態。
針對四旋翼航空平臺,電力線檢測中常見的飛行軌跡,如圖2所示。

圖2 四旋翼用于電力線檢測飛行軌跡圖Fig.2 Flight Trajectory Diagram of Quadrotor for Power Line Detection
此外,四旋翼無人機配備了視覺采集系統,飛行時拍攝的視頻傳輸到GCS(地面控制站)進行圖像處理,為用戶提供更優質的服務。
2.3 地面控制站
在飛行過程中對四旋翼的監測是該項工作的一個重點。GCS操縱多個無人機飛行并提供了圖形用戶界面,如圖3所示。

圖3 PC機地面控制站示意圖Fig.3 Schematic Diagram of PC Ground Control Station
GCS軟件主要負責監控和向直升機發送數據,管理飛行計劃和任務,無人機和顯示無人機的儀表通過遠程手動控制。PC機GCS圖形用戶界面中,PC地面站通過無線電調制解調器接收包含GPS位置、高度和姿態數據的飛行器的遙測串。此外,GCS還有一個友好的用戶界面,用于設置飛行路徑任務。
3 四旋翼運動控制
四旋翼無人機實現快速穩定飛行需要精確的控制,且具有高度耦合的動力學:一個轉子的速度變化導致至少3個自由度的運動。由于左右升力的不平衡,降低右旋翼的速度會導致四旋翼無人機向右滾動。左右電機對和前后電機對的扭矩不平衡,會導致四旋翼無人機向右偏航。滾動將導致四旋翼無人機向右平移,因為旋翼的力現在既指向左下方,也指向右下方。當轉子轉動時,它受到空氣阻力的阻力,空氣對轉子的反作用力產生一個稱為感應力矩的反作用力。感應力矩作用于轉子的方向與轉子相反。傳統四旋翼無人機使用尾槳抵消主旋翼的感應力矩。左右對電機和前后對電機反向旋轉,產生反向旋轉扭矩。
3.1 旋翼無人機力平衡
實現力和扭矩平衡,當沒有任何程度的凈力時,它會懸浮在空中。最小的力將導致線性加速度(牛頓第二定律f=ma)和最小的扭矩將導致角加速度(ρ=Iρ)。當四個轉子的推力之和等于四旋翼無人機的重量時,就可以實現穩定懸停的力平衡,如圖4所示。

圖4 旋翼無人機力平衡示意圖Fig.4 Schematic Diagram of Force Balance of Rotor Drone

式中:0、1、2、3、4—中心、前、右、后、左的受力。
運動受到重力、慣性和空氣阻力作用。重力與垂直運動相反,它會消耗相當大的能量使四旋翼無人機保持在空中。由于其在運動時沒有氣動面產生升力,所以所有升力都是由轉子產生的。四旋翼無人機能在空中停留的時間是由轉子的升力系數和電池的重量之間的平衡性決定的。
慣性與線性和旋轉加速度相反,有助于穩定運動,且電動機質量引起的慣量抵抗角加速度。通過定位四旋翼無人機空氣動力中心以下的重心(將電池放置在機身交叉點以下),電池質量引起的慣性可以抵抗俯仰和橫搖。
空氣阻力可為直線和旋轉運動提供阻尼,阻力與速度成正比,除了與轉子旋轉方向相反的阻力外,阻力都很小。因此空氣阻力對轉子速度提供阻尼,從而減緩了四旋翼無人機對外力的響應。
3.2 四旋翼運動控制
在多旋翼四旋翼無人機的情況下,控制計算每個螺旋槳轉速,以產生所需的總推力T和力矩,分別為橫搖、俯仰和偏航、L、M、N。考慮到有n個旋翼的四旋翼無人機的實際情況,其中每個電機的i(i=1,2,···,n)。

定義:

很容易驗證:Tmin≤T≤Tmax
系數μ和κ分別表示螺旋槳產生的推力和偏航力矩,臂長為l。無人機,如圖5所示。需要進行四個電機的轉速計算。
對于圖5 所示的四軸四旋翼無人機,需要計算四個電機轉速。螺旋槳速度計算表示為Ωc=A-1vc。螺旋槳轉速與矢量v之間的映射矩陣A表示為:
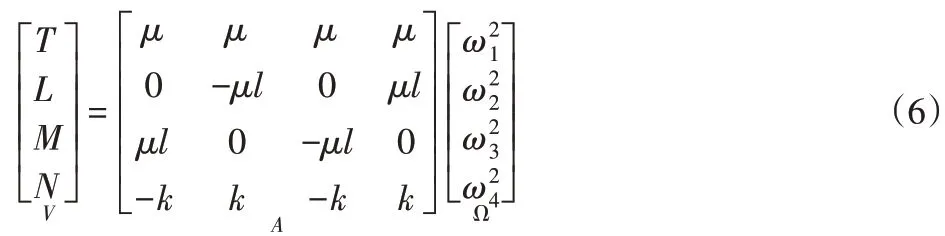

圖5 四旋翼無人機配置Fig.5 Quadrotor UAV Configuration
4 旋翼機器人視覺系統
4.1 視覺系統
旋翼機器人視覺系統由TIR攝像機和彩色攝像機組成。視頻發射器將圖像發送到全球坐標系(Global Coordinate System,GCS)。該方案,如圖6所示。

圖6 視覺系統方案Fig.6 Vision System Scheme
利用視覺算法進行圖像處理,為電力線的節點定性檢測奠定基礎。檢測盒接頭相對溫度密切關聯,溫度增加會導致節點處電阻率增加。所以,通過節點溫度監測,即可完成電力線的定性故障診斷。節點的溫度必須位于圖像的空間位置,首先剔除背景,將電力線節點置于圖像前景,其次比較三個節點的溫度。如果節點溫度相同,則無故障,如果溫度不同,則判定有故障。檢測算法,如圖7所示。
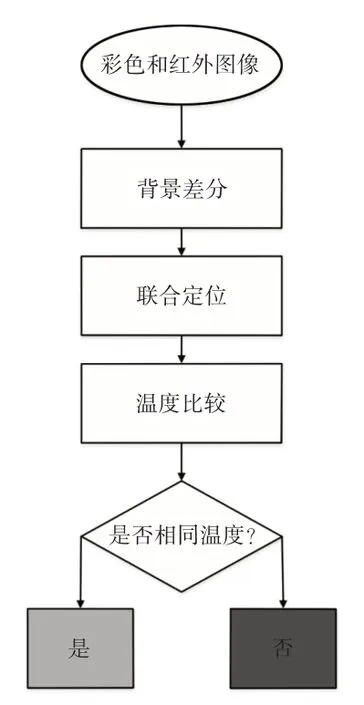
圖7 定性檢查視覺算法流程圖Fig.7 Qualitative Anspection Visual Algorithm Flowchart
如果從定性檢測中發現故障,則可以確定電力節點的準確溫度。然而為了滿足定量檢測的要求,還需要進行進一步的開發和傳感器融合。從TIR攝像機中獲取反射溫度,要準確評估真實溫度必須同時考慮風速、溫度等環境變量。
4.2 背景剔除
由于離電力塔較近,電力線接頭屬于紅外圖像的前景,視覺算法的第一步是從圖像中去除背景。通過一個立體標定系統(TIR相機+彩色相機)并基于OpenCV庫進行校準,允許從環境中檢索三維信息,所以可以丟棄背景。原始圖像(顏色和IR)和生成的前景圖像,如圖8所示。

圖8 紅外圖像-背景剔除實驗結果Fig.8 Infrared Image-Background Removal Experiment Results
4.3 節點定位
一旦背景從圖像中去除,必須找到電源線的連接點。由于系統的電氣性質,電力線的節點溫度最高,可在圖像中定位熱點相當于定位電力線的節點。讓Φ()x,y為紅外圖像的前景,從前景得到的最大和最小溫度分別為:

Γ={(a,b)∈a×b|0 ≤a<w,0 ≤b<h},其中w和h分別為圖像的寬度和高度,單位為像素。得到熱點的初始圖像為:


式中:Z—8×8的鄰域掩模,C(x,y)—約束圖像,定義如下:

遞歸操作被遞歸地實現,直到當(x,y)=Ψk(x,y)=Ψk-1(x,y)時達到穩定圖像。(x,y)中的每個連通區域代表熱點,最后將獲得每個熱節點的溫度平均值進行比較。視覺算法的最后一步是定性檢查,如果從電線節點獲得的溫度(從前一步驟中的熱點檢索)是相同的,則沒有故障。如果存在差異,則存在潛在故障并且必須調查電力塔。從TIR 圖像獲得的熱點的示例,如圖9所示。

圖9 視覺算法熱點檢測結果Fig.9 Visual Algorithm Hot Spot Detection Results
5 旋翼無人機在電力巡檢應用
5.1 神經網絡速度控制
這里提出的一種用于四旋翼控制的嵌套結構,該結構為了達到和保持一個期望的速度矢量,必須穩定無人機的姿態。因此提出了一個外環速度控制和內環姿態控制的控制系統分解。在這種結構中,內部的姿態控制回路必須比外部回路快得多,并穩定外部回路控制所需的角度。該嵌套結構,如圖10所示。

圖10 無人機四旋翼控制的嵌套結構Fig.10 Nested Structure of the UAV Vehicle Control

由于向量函數f的復雜性,不可能將反函數作為閉合數學表達式來獲得,因此在神經網絡的幫助下實現逆f-1。簡化神經網絡的訓練:為了實現任何期望的速度矢量,可以設置x11d=ψd=0,該處理不必應用偏航旋轉。
在下一步中,選擇了合適的神經網絡類型,內部結構和學習算法,且這里使用多層感知器作為前饋神經網絡。輸入層中的20個神經元,隱藏層中的20個神經元和輸出層中的4個神經元最終取得了令人滿意的結果。采用Levenberg-Marquardt反向傳播算法進行實驗,實驗表明1000個輸入和輸出數據集足以訓練所選擇的神經網絡,其能夠實現所需的反函數f-1。各個輸入變量的變量x7d的前100個數據點和由神經網絡計算的相應值的示例,如圖11所示。
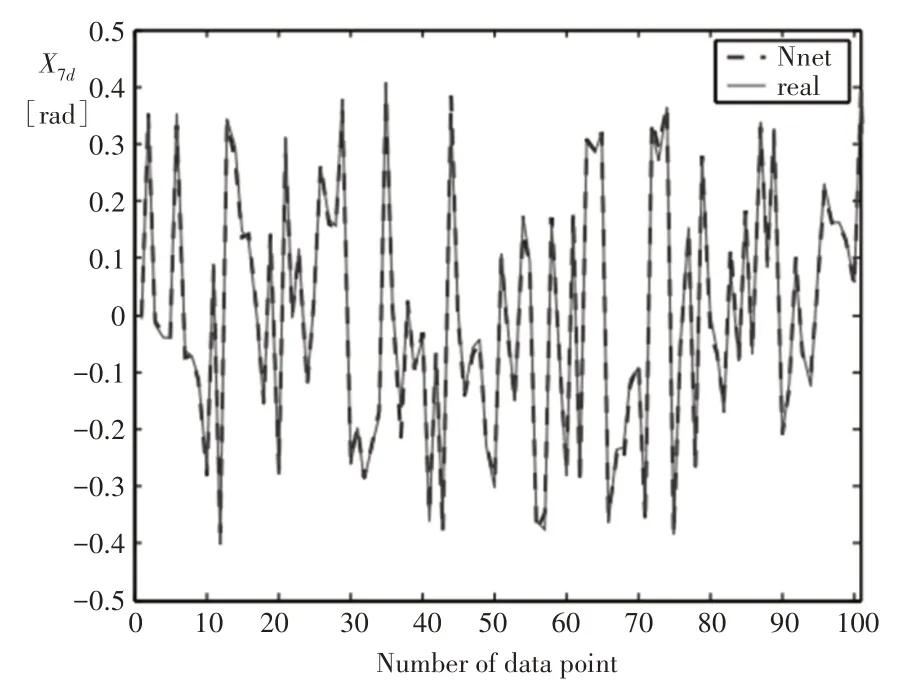
圖11 訓練神經網絡的示例結果Fig.11 Example Results of the Trained Neural Network
5.2 旋翼飛行仿真
開發一個為模型評估提供測試平臺的飛行模擬器,如圖12所示。模擬器采用Java4GL編寫,模型的所有參數都存儲在XML文件中。

圖12 飛行模擬器、頂部環境、底部模型參數設置Fig.12 Flight Simulator,Ttop-Environment,Bottom-Model Parameters
測試平臺已經對所有的參數進行了初始測量,但是為了獲得更精確的測量,仍然構建了一些測試例。
當使用模擬器時,讓模擬的飛行器停止上升或下降是很困難的,要讓它懸停在一個高度,必須調整油門,直到z方向的速度和加速度都為零,一旦發出任何其他命令,它又開始上升或下降。
5.3 電力巡檢實驗
實際四旋翼機器人飛行情況,如圖13所示。可以看出高空飛行效果非常穩定,控制算法魯棒性良好。

Fig.13 Actual Flight Test Diagram.
6 結論
基于四旋翼直升機的無人機對電源線節點進行巡檢具有效率更高、成本更低、更安全的特點。多旋翼無人機在建筑設計、物流工程領域有很好的應用,應用深度和范圍都不斷擴展。
這里提出了一種基于組合控制策略的小型四旋翼無人機四旋翼控制系統,其包括四旋翼無人機力平衡、運動控制和慣量。同時電力多旋翼無人機巡檢控制帶有視覺系統,可以檢測電線節點是否有問題。這里開發了內環姿態控制器和外環速度控制器,并在Matlab/Simulink仿真模型中導出和實現了四旋翼飛行器的動態模型。借助該仿真,對非線性四旋翼控制系統進行了測試并證明了其效率。仿真結果表明該方法的正確和有效性,這里的軌跡跟蹤控制策略能有效控制無人機,飛行軌跡誤差可以控制在0.2m的范圍內。
在未來的工作中,分配方法擴展到多螺旋轉子,并實現螺旋助推效率的在線分析,同時研究控制重新分配變量的相關問題。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48