復合電源電動汽車功率分配與再生制動研究
2022-10-12 05:59:14姜蘇杰王汝佳
機械設計與制造 2022年10期
汪 偉,姜蘇杰,王汝佳,羅 金
(江蘇理工學院汽車與交通工程學院,江蘇 常州 213001)
1 引言
現如今,純電動汽車越來越受到各國的歡迎,但其也存在著行駛里程短、電池壽命短、充電時間長等三個問題。目前,國內外學者主要通過在汽車儲能器中加載超級電容,組成復合電源,并研究其功率分配方式,以期攻克這些難題[1-2]。
復合電源功率分配的策略主要有邏輯濾波控制、小波控制、模糊控制[3]。文獻[4]通過CRUISE軟件采用模糊邏輯控制分配復合電源功率,驗證了它的優越性,但其未對再生制動模型進行開發,能量回收有限。再生制動力的分配方式主要有串、并聯、最優能量等[5-7]。文獻[8]將制動力按照約束條件分配,避免汽車出現抱死危險狀況的同時,提高了制動時回收的能量,但僅根據邊界制定控制策略,魯棒性不強。文獻[9-10]將并行控制策略燒錄到Freescale單片機中,驗證了并行控制策略的有效性,但并未考慮車速對能量回收的影響。
以復合電源電動汽車為研究對象,采用雙模糊控制分配電源功率,并基于制動強度、車速、超級電容的SOC值與ECE法規等建立一種新的再生制動力的分配模型。最后,使用模糊控制器協調分配摩擦制動力和電機制動力。
2 復合電源控制器的設計
2.1 雙模糊控制器的設計
雙模糊控制器參數由Preq、SOCbat、SOCuc、Kuc四個變量組成。其中,Preq為車輛所需的功率;SOCbat、SOCuc分別為蓄電池和超級電容的荷電值;Kuc為超級電容器的輸出功率與總功率之比。當Preq>0,將SOCuc和SOCbat分為{LMH},代表{小中大}。將Kuc和Preq分為{TSSMBTB},代表{較小小中大較大}。當Preq<0,電機沒有功率輸入,模糊控制器的輸入變量設置為SOCbatSOCuc,并將其分別分為{LMH}和{TLLMH},Kuc分為{TSSMB}。其隸屬函數,如圖1、圖2所示。模糊控制器規則,如表1、表2所示。
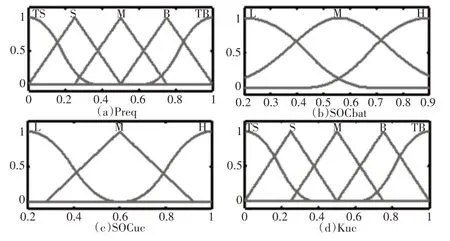
圖1 Preq>0 時,隸屬度函數Fig.1 Preq>0,Membership Function
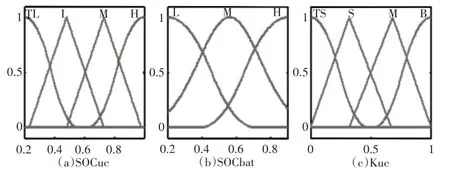
圖2 Preq<0 時,隸屬度函數Fig.2 Preq<0,Membership Function
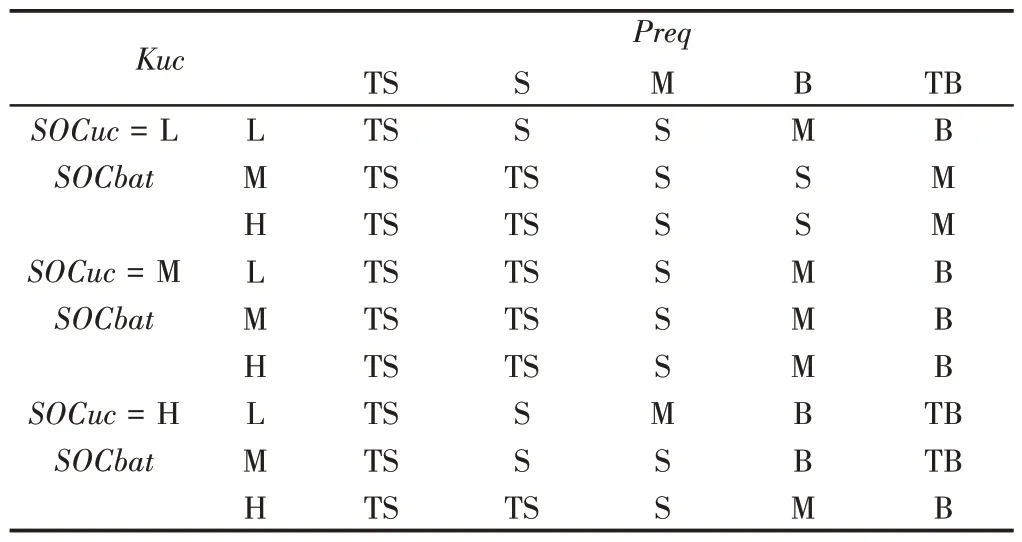
表1 Preq>0 模糊控制器規則Tab.1 Preq>0 Fuzzy Controller Rules
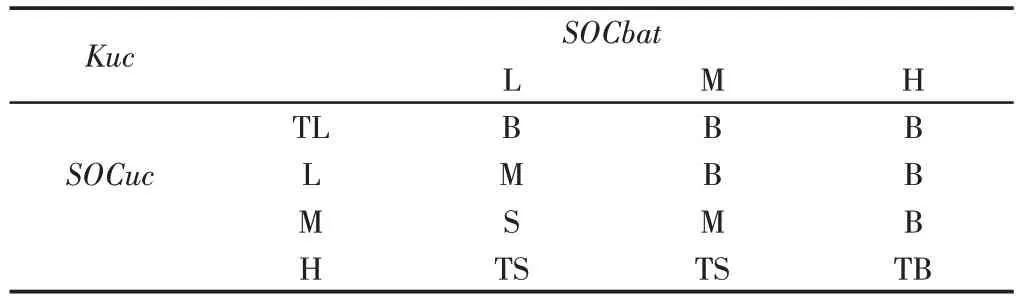
表2 Preq<0 模糊控制器規則Tab.2 Preq<0 Fuzzy Controller Rules
根據上述模糊控制規則,設計的仿真模型,如圖3所示。
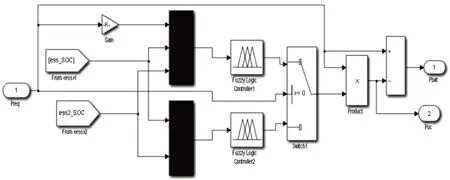
圖3 雙模糊控制器Fig.3 Double Fuzzy Controller
2.2 模糊-邏輯控制器的設計
模糊-邏輯聯合控制策略如下:車輛在行駛狀態下采用模糊控制,在制動狀態下采用邏輯門控制。當超級電容的SOC值在設定的閾值內,則Preq=Puc,否則Puc=0。根據邏輯門控制建立的負功率分配模型,如圖4所示。
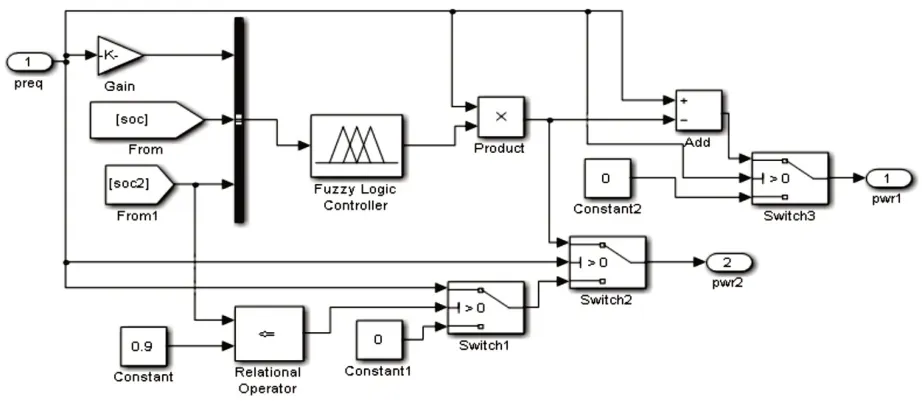
圖4 模糊-邏輯控制器Fig.4 Fuzzy-Logic Controller
2.3 基于MATLAB的仿真結果分析
針對某款單電源小型電動汽車組成復合電源,在UDDS道路工況下,進行仿真分析。電動汽車整車參數,如表3所示。
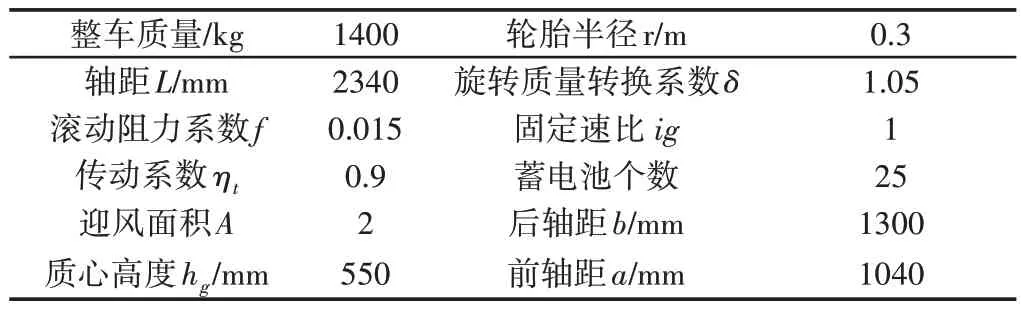
表3 整車參數Tab.3 Vehicle Parameter
雙模糊控制和模糊—邏輯控制下電池和超級電容的SOC對比曲線,如圖5所示。
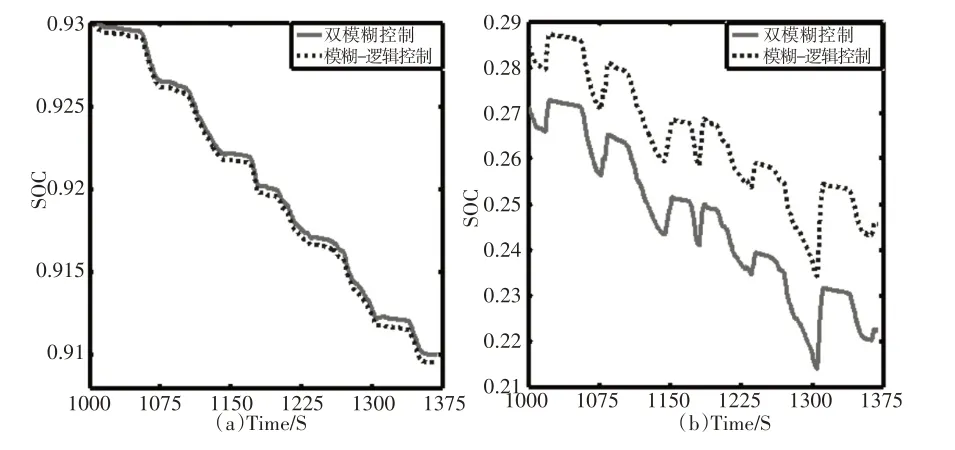
圖5 電池和超級電容的SOCFig.5 SOC of the Battery and Supercapacitor
由圖5(a)可知,采用雙模糊控制的電池SOC下降趨勢較為平緩,能量消耗較少。這是因為采用雙模糊控制策略,汽車在制動時,電池能夠回收能量而采用模糊-邏輯控制僅由超級電容回收制動能量,故其超級電容回收的能量多于雙模糊控制。因此,由模糊-邏輯控制的超級電容的SOC下降趨勢小于雙模糊控制。這一點由圖5(b)也可以驗證。
單個工況下汽車的總能耗對比曲線,如圖6 所示。由圖可知,雙模糊控制的汽車消耗的能量比模糊-邏輯控制小5KJ。兩種控制策略下電池與超級電容的電流對比圖,如圖7所示。由圖7(a)、圖7(b)可知,超級電容均承擔著需求的峰值功率。當時間在1000s后,由于超級電容的電量消耗過大,因此降低超級電容的功率分配值。同時,電池承受的電流沖擊相差不多。綜上所述,雙模糊控制的控制效果總體優于模糊-邏輯控制。
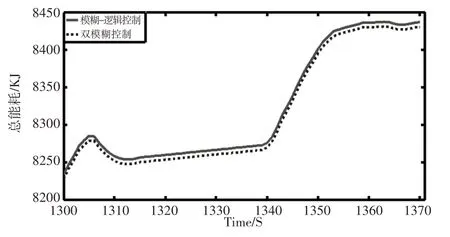
圖6 單個工況總能耗Fig.6 Total Energy Consumption Under Single Working Condition
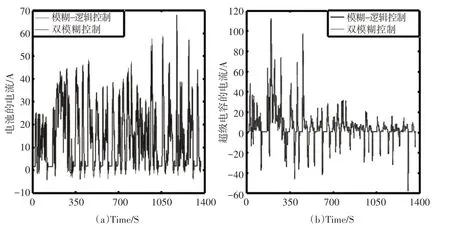
圖7 電池和超級電容的電流Fig.7 Current In Batteries and Supercapacitors
3 再生制動力模型
3.1 再生制動力的分配模型
原ADVIOR 模型中根據查表法對制動力進行分配,該方式簡單且能夠回收一定的能量,但其統計的車速較少,且僅靠車速確定電機制動力的比例,而未考慮儲能元器件的SOC值、電機轉速特性以及ECE法規等因素的影響,回收的能量有限。
汽車制動時存在三種情況,前輪先抱死;后輪先抱死;前后輪同時抱死。
三種情況下,前后輪制動力大小滿足,如式(1)所示。
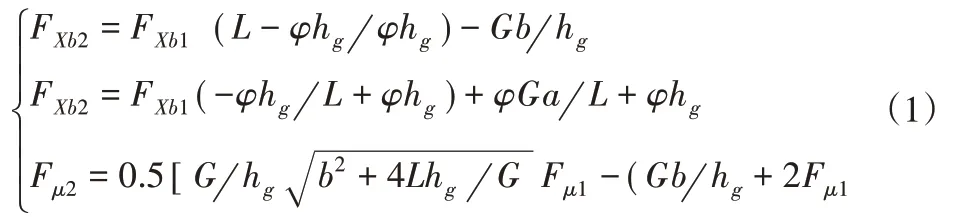
式中:FXb1FXb2—地面對前后輪制動力;φ—附著系數;L—汽車軸距;hg—質心高度;a、b—前、后軸距;Fμ1、Fμ2—前、后輪制動器制動力。
根據ECE R13 法規,前后輪制動力還應該在ECE 線上。ECE關系,如式(2)所示。

此外,當制動力完全由電機提供時,對應的制動強度,如式(3)所示。

式中:T—電機最大轉矩;η—電機效率;i0—主減速比。設汽車載重500kg代入上表參數,可得電機完全制動對應的制動強度為0.133。
通過以上分析,制定的再生制動力模型,如圖8所示。
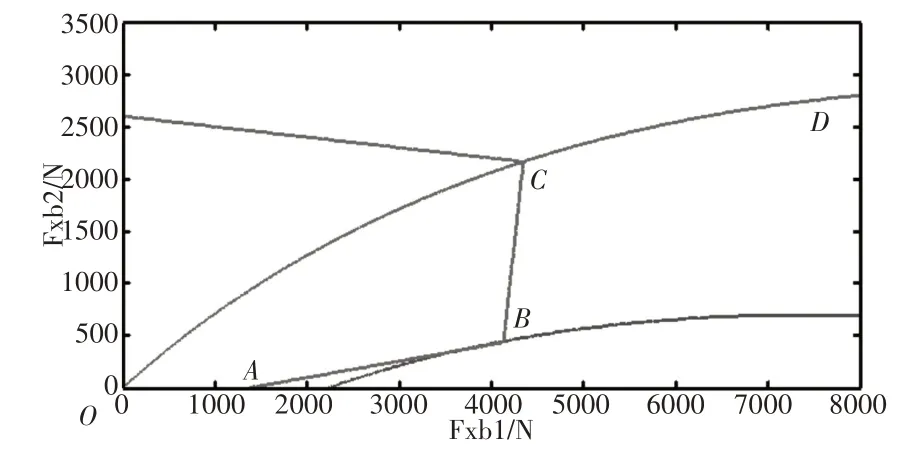
圖8 再生制動模型的分配曲線Fig 8 Distribution Curve of Regenerative Braking Model
圖中,A、B、C三點對應的制動強度分別為0.133、0.33 和0.47。當制動強度小于0.133時,此時僅由電機制動,制動力遵循OA線分配。AB線為ECE線的切線。當制動強度在[0.133 0.33)時,制動力分配遵循AB線。C點為過B點的f線與I曲線的交點。當制動強度在[0.33 0.47]時制動力分配遵循BC線。當制動強度大于0.47時,制動力分配遵循CD線。
3.2 基于模糊控制的再生制動力的分配策略
研究發現,當車速<15km/h時,采用電機制動幾乎回收不到能量。
緊急制動時,若采用電機制動則汽車的安全性不能保障。因此,模糊控制器輸入參數設為制動強度Z、超級電容的SOC值以及車速V并將三者劃分為3個等級,輸出參數為電機制動力占前輪的總制動力的比例Kuc并將其劃分為11個等級,其隸屬度函數和規則,如圖9、表4所示。后、前向再生制動力模糊控制器模型,如圖10、圖11示。
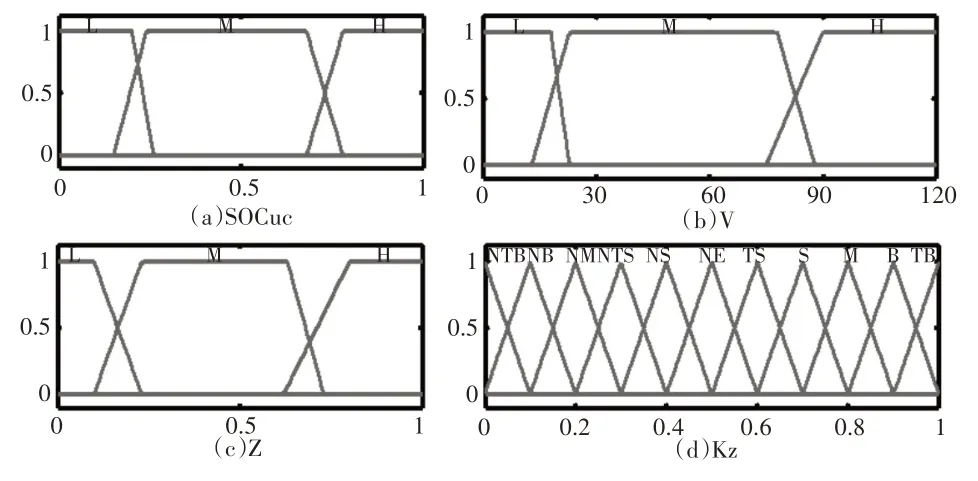
圖9 模糊控制器隸屬度Fig.9 Membership Degree of Fuzzy Controller
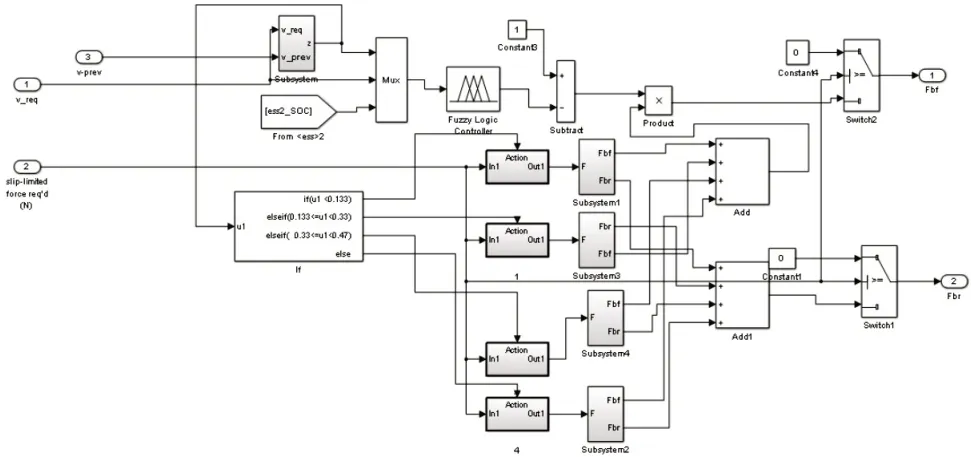
圖10 后向制動力模型Fig.10 Backward Braking Force Mode
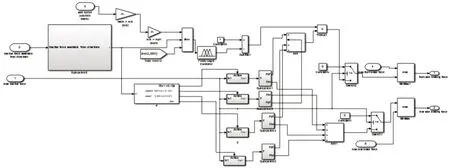
圖11 前向制動力模型Fig.11 Forward Braking Force Model
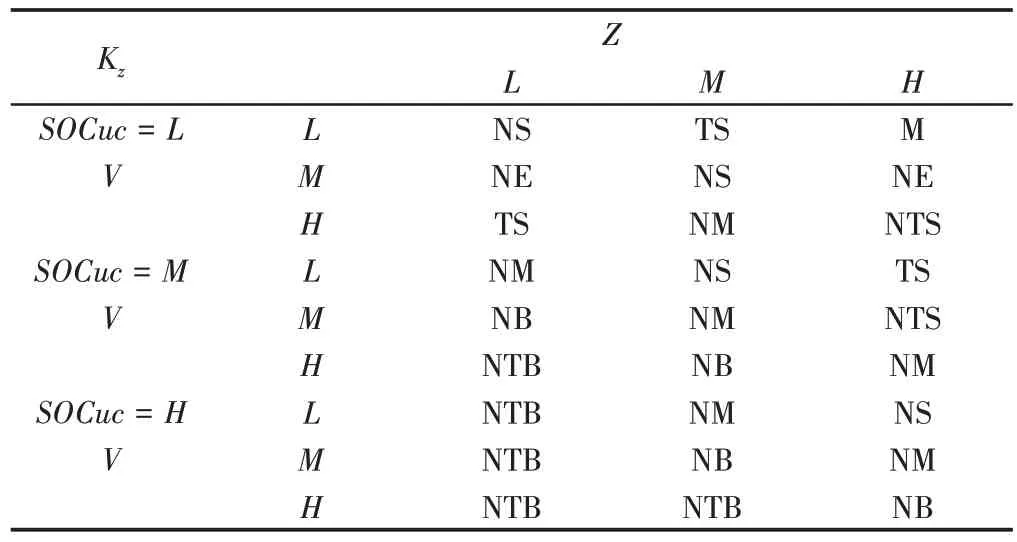
表4 控制器規則Tab.4 Rules for Controllers
3.3 仿真結果分析
再生制動力控制策略改進前后電池和超級電容的SOC對比曲線,如圖12 所示。
由圖12(a)可知,改進后的再生制動力控制策略使得電池SOC下降進一步變緩,單個UDDS 工況下,改進前后電池SOC 值相差0.01。
由圖12(b)可知,改進后的再生制動力控制策略使得超級電容回收了更多的能量,單個UDDS工況SOC相差0.2。
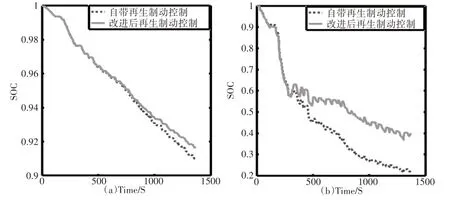
圖12 電池和超級電容的SOCFig.12 The SOC of Supercapacitor and Battery
再生制動力控制策略改進前后電池受到的電流沖擊對比曲線,如圖13所示。
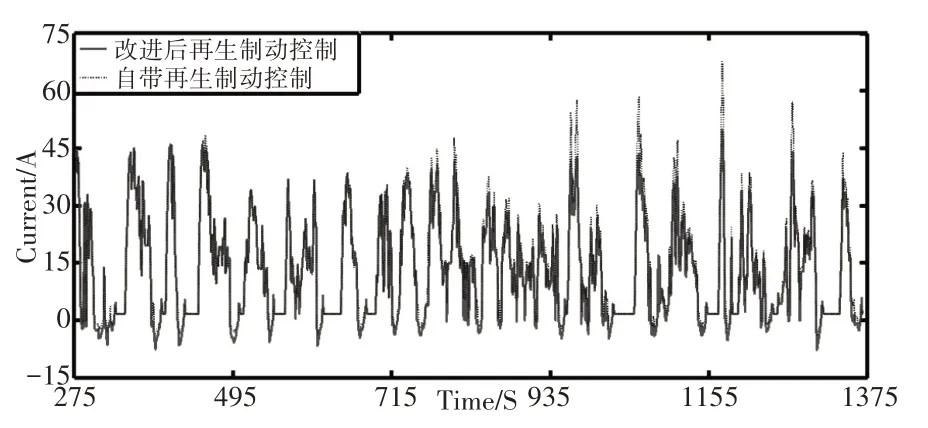
圖13 電池電流Fig.13 Current in Battery and Supercapacitor
從圖13中可以明顯看出,在正功率狀態下,電池受到的沖擊最大減少20A。同時,在負功率狀態下,電池充電電流也有一定的提升。
4 結論
(1)分別采用雙模糊控制以及模糊-邏輯控制分配復合電源的功率,通過電池及超級電容的SOC、電流、溫度和能耗的對比曲線選取兩者間最為合適的一種。
(2)基于制動強度z、車速v、超級電容的SOC 值和ECE 法規等建立一種新的再生制動力的分配模型,并通過模糊控制器協調摩擦制動及機械制動力的力矩分配,使得控制效果進一步提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02