某二維相控陣雷達中心機的設計與實現(xiàn)
2022-10-12 11:38:18任媛媛路焜鵬高一棟
火控雷達技術 2022年3期
關鍵詞:系統(tǒng)
任媛媛 路焜鵬 高一棟
(1.西安電子工程研究所 西安 710100;2.陸裝駐西安地區(qū)軍事代表局 西安 710000)
0 引言
與傳統(tǒng)的機械掃描雷達相比,二維相控陣雷達通過控制不同發(fā)射子陣的饋電相位來實現(xiàn)多種波束不同指向,具有波束掃描迅捷的優(yōu)點,能夠實現(xiàn)凝視探測,從而聚集更多的能量、更長時間的積累。充分利用這些時間和空間資源,可提高雷達波束覆蓋范圍、探測距離、數據率、系統(tǒng)多功能和多目標能力,從而實現(xiàn)對“低慢小”目標的有效探測。
然而,雷達的多功能、多目標能力通常受到雷達各項資源、計算機處理能力等因素的限制,如陣元分割,通常節(jié)省了搜索時間資源,但波束的展寬,會導致精度與距離性能有所下降。如何在搜索和跟蹤不同功能下實現(xiàn)對各項資源的優(yōu)化利用;如何實現(xiàn)系統(tǒng)對多目標的精確搜索和跟蹤;如何設計模式相互轉換實現(xiàn)多功能等,這些都與系統(tǒng)資源息息相關。因此,對二維相控陣雷達的系統(tǒng)資源進行合理布局和規(guī)劃,就成為雷達設計中的重要問題。
雷達中心機主要用于二維相控陣雷達系統(tǒng)各資源協(xié)調、調度和控制,是雷達控制的核心。其設計在合理規(guī)劃雷達的時間與能量資源基礎上,通過高效調度雷達所要執(zhí)行的任務,合理分配系統(tǒng)資源,以充分利用相控陣天線技術特點及其應用潛力,實現(xiàn)雷達的多功能、多任務能力。文章基于某二維相控陣雷達中心機的設計,采用嵌入式實時多任務管理系統(tǒng),利用天線波束敏捷性,實現(xiàn)高效搜索、目標精確跟蹤和多任務工作能力。
1 組成及功能分析
1.1 雷達系統(tǒng)組成
某兩維有源相控陣雷達組成如圖1所示,天線采用4子陣設計,且4個子陣單獨設計接收通道。這些子陣既可以協(xié)同工作,實現(xiàn)遠距離、高精度的目標探測,也可以獨立工作,分時完成不同功能。中心機與數據處理機、信號處理機、波控機、頻綜以及伺服驅動機構相互通信,接收終端發(fā)送的工作命令,對各分系統(tǒng)實施實時控制,實現(xiàn)全機工作。
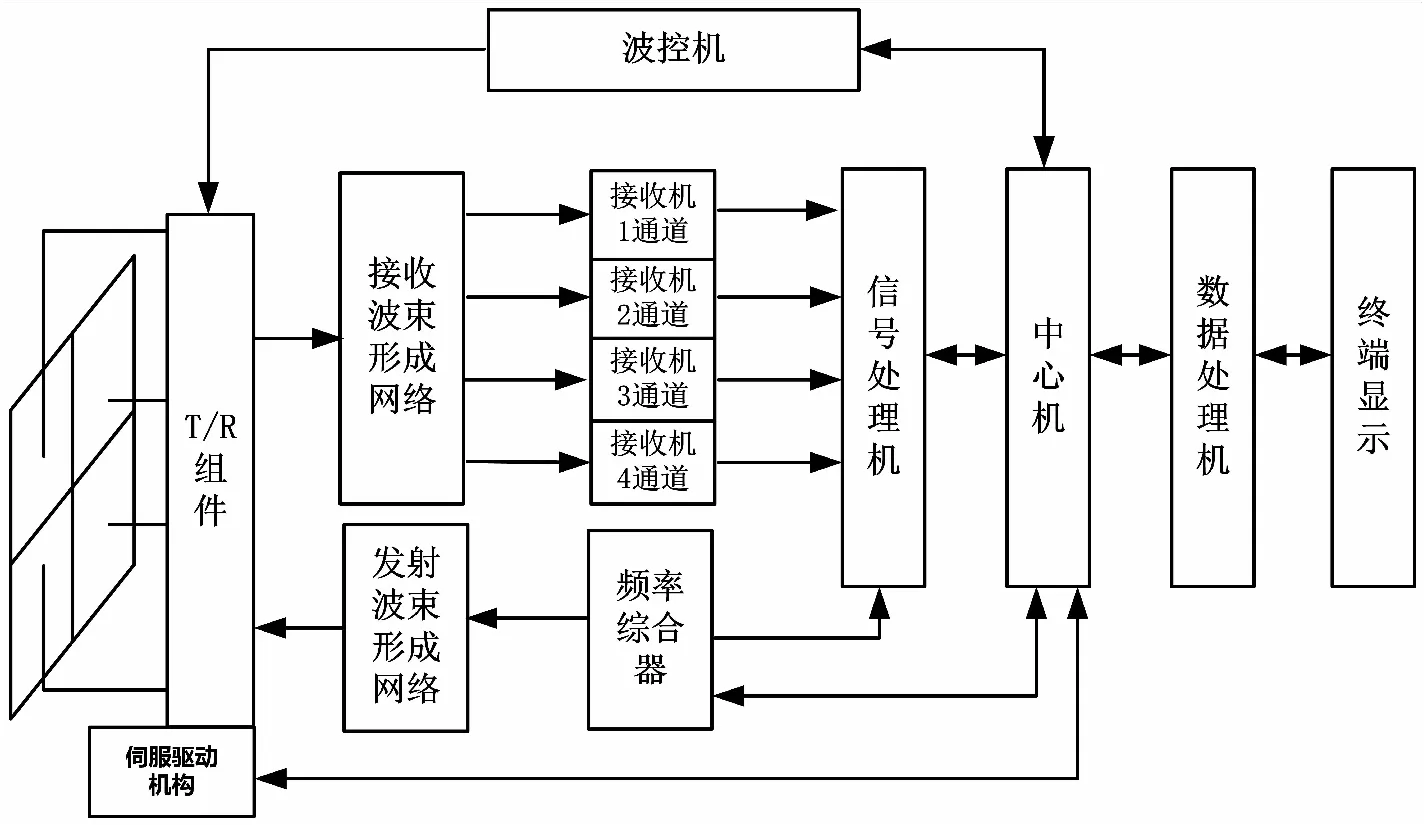
圖1 系統(tǒng)組成示意圖
1.2 功能劃分
中心機負責雷達系統(tǒng)全機控制和各分系統(tǒng)的協(xié)同工作,包括工作參數產生、時序控制、工作模式管理、數據分發(fā)。
1.2.1 系統(tǒng)初始化
用于完成工作參數的產生。系統(tǒng)上電后首先完成對硬件接口的初始化,包含板卡、通信接口(串口、網絡、PCIE、ARINC429)的初始化;其次加載操作系統(tǒng),初實現(xiàn)對VPX設備的總線地址映射;之后進行對AD采樣、目標處理、數據處理、目標識別等單元參數的初始化;最后完成其它分系統(tǒng)的初始化。
1.2.2 定時控制
用于控制系統(tǒng)工作所需各種定時信號的產生,包括信號處理零距離脈沖、頻綜發(fā)射觸發(fā)、波駐脈沖、發(fā)射觸發(fā)脈沖、接收機保護脈沖、PRF、CPI信號等,實現(xiàn)系統(tǒng)時序管理。
1.2.3 工作模式管理
工作模式管理是中心機的核心功能,也是雷達系統(tǒng)控制的核心。收到終端操控命令后,中心機依據嚴格的系統(tǒng)時鐘,完成各模式下雷達資源調配工作。
為實現(xiàn)二維相控陣雷達陣元和波束資源的合理利用,根據雷達不同使用環(huán)境和用途,系統(tǒng)設計多種工作模式:含地空模式、被動偵察模式、校準模式、自檢模式、待機模式等5種主要模式。其中,地空模式和被動偵察模式為主要工作模式。
地空模式下,中心機控制頻綜產生工作所需信號;控制波控機發(fā)射對應賦形波束,實現(xiàn)對空、地、海掃描;控制信號處理機實現(xiàn)對運動目標檢測、恒虛警控制等功能。
自檢模式用于對全機各分系統(tǒng)進行故障自檢并上報,為上電初始默認模式。系統(tǒng)上電自檢完成后自動進入被動偵查模式;其他狀態(tài)下,中心機接收終端自檢命令后,進入該模式,自檢結束回到待機模式。
被動偵查模式為避免敵方的電子偵查設備,雷達處于偵聽狀態(tài),對戰(zhàn)區(qū)的電子設備所用的頻率、時寬、帶寬、位置等信息進行解析。開機自檢模式結束后即進入該模式,在確認沒有輻射單元后,再轉入地空模式,進行雷達主動探測,此時可進行干擾或者直接進行打擊。其他狀態(tài)下,中心機接收終端命令進入該模式,始終處于被動偵測狀態(tài),當再次接收到模式轉換命令時,轉入其他狀態(tài)。
待機模式為各模式切換的中間態(tài),用于停止工作等待工作狀態(tài)命令。此時雷達有工作所需的各項定時,但是不發(fā)射電磁波主動工作,也不被動偵聽輻射源,天線停止轉動。待機模式可進入其余各個模式。
校準模式用于進行系統(tǒng)幅相一致性校準等功能。
不同模式下,系統(tǒng)發(fā)射賦形、信號形式不同,中心機控制任務優(yōu)先級不同。模式間,既可相互轉化,也可在接收到終端命令后直接轉化。其相互轉換條件如圖2所示。
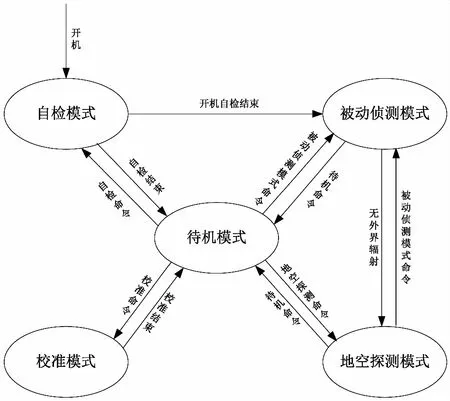
圖2 系統(tǒng)各模式轉化示意圖
中心機需要在不同模式下,進行優(yōu)先級以及資源調度,實現(xiàn)系統(tǒng)功能。
1.2.4 數據分發(fā)
接收操控終端的模式控制命令,產生不同工作模式下的各項參數及定時,在定時的不同時刻,將參數通過各種接口發(fā)送給分系統(tǒng),控制整個雷達協(xié)調有序工作。此外,中心機根據慣導信息和波束指向信息,進行數據解算,控制伺服(對空需提供360°旋轉)與波控機,完成對雷達波束的穩(wěn)定控制。
2 中心機軟件設計關鍵問題
2.1 任務優(yōu)先級分析及設定
雷達的5種主要工作模式中,地空模式為主動探測模式,也是系統(tǒng)最主要的工作模式。該模式下,系統(tǒng)有搜索、截獲確認和跟蹤3種狀態(tài),相應的任務分為以下三種狀態(tài),根據重要程度,優(yōu)先級依次遞減:
1)跟蹤:對已經建立跟蹤的目標維持穩(wěn)定波束跟蹤。中心機分辨中斷識別號,進入任務序列,從跟蹤目標地址讀取目標相關信息,根據目標信息,如行駛方向、速度,進行威脅排序,確定跟蹤目標的優(yōu)先級。優(yōu)先級從高到低,對所有目標依次進行跟蹤。在對目標跟蹤完成后,進入跟蹤前的搜索狀態(tài)。
2)截獲確認:對于搜索的目標,利用原參數發(fā)射確認波束,降低虛警。當時間資源緊張時,該任務隊列將降低級別,適當時刻選擇刪除。
3)搜索:對指定空域按照順序波位進行照射以發(fā)現(xiàn)目標。該模式下,雷達發(fā)射針狀波束,對關心區(qū)域完整覆蓋,當搜索到疑似目標時,通過TAS方式進行跟蹤。中心機進入該模式后,預置參數,設置時序,產生波駐中斷,再根據模式、位置、威脅度、目標飽和度、飛行狀態(tài)等信息產生當前工作參數,雷達工作周期為波駐中斷周期。
在這3種任務的設計下,每個波位結束后,中心機將查詢多任務序列,并從高優(yōu)先級到低優(yōu)先級執(zhí)行相應的任務。任務序列中各個目標信號的處理過程如圖3所示,這種設計方式與發(fā)現(xiàn)和確認是一致的。

圖3 主動探測處理流程
若系統(tǒng)正以某種模式工作,接收到外部指令,在對新參數確認或糾錯后,停止當前任務,產生新任務,重新循環(huán)工作,工作流程如圖4所示。

圖4 中斷處理流程
被動偵查模式下,中心機首先控制天線產生大波束寬度發(fā)射賦形波束;在覆蓋頻率范圍內,以大帶寬為一個單元,采用頻率步進對頻率進行遍歷,判斷是否存在輻射源,如果存在輻射源,在對應的頻率單元內,采用小帶寬信號為一個單元,繼續(xù)使用頻率步進,對存在輻射源的頻率范圍進行頻率迭代搜索;判斷是否存在該輻射源,如果存在就鎖定該頻率,存儲該輻射源對應的方位角和俯仰角;對雷達平臺進行移動一段距離,用該鎖定的頻率和窄波束就行空域搜索,如果搜索到該輻射源,采用兩點定位的方位確定該輻射源的位置信息。
其余待機、校準和自檢模式均為系統(tǒng)輔助模式,隨時可被打斷,其優(yōu)先級均低于工作模式。
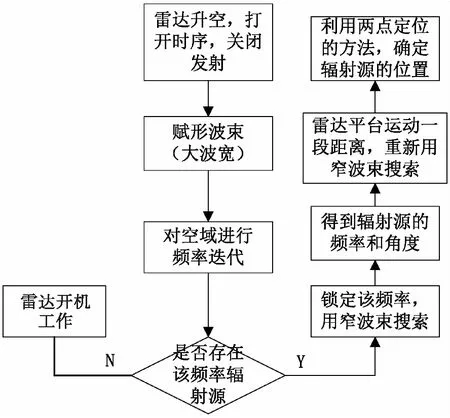
圖5 被動檢測處理流程
2.2 自適應調度技術
自適應資源調度技術,就是以搜索、跟蹤為起始直到目標輸出,根據功能劃分,形成多個任務序列,合理配置時間、能量、空間資源,對各項任務進行分級。如對外界指令響應設置為優(yōu)先級最高,以便雷達能夠迅速反應操作手的意圖;慣導數據直接影響波束指向及角精度,優(yōu)先級較高;數據打包及轉發(fā),不影響系統(tǒng)實時性和性能,優(yōu)先級較低;威脅度大的目標優(yōu)先級較高,無威脅的目標,在時間資源緊張的情況下可丟棄,刪除該任務隊列。當前的事件執(zhí)行,是將最重要、最急迫任務,放入執(zhí)行隊列,雷達將資源分配給該事件,事件執(zhí)行完畢后,該任務退出,將調度下一個關鍵事件,調度算法如圖6所示。
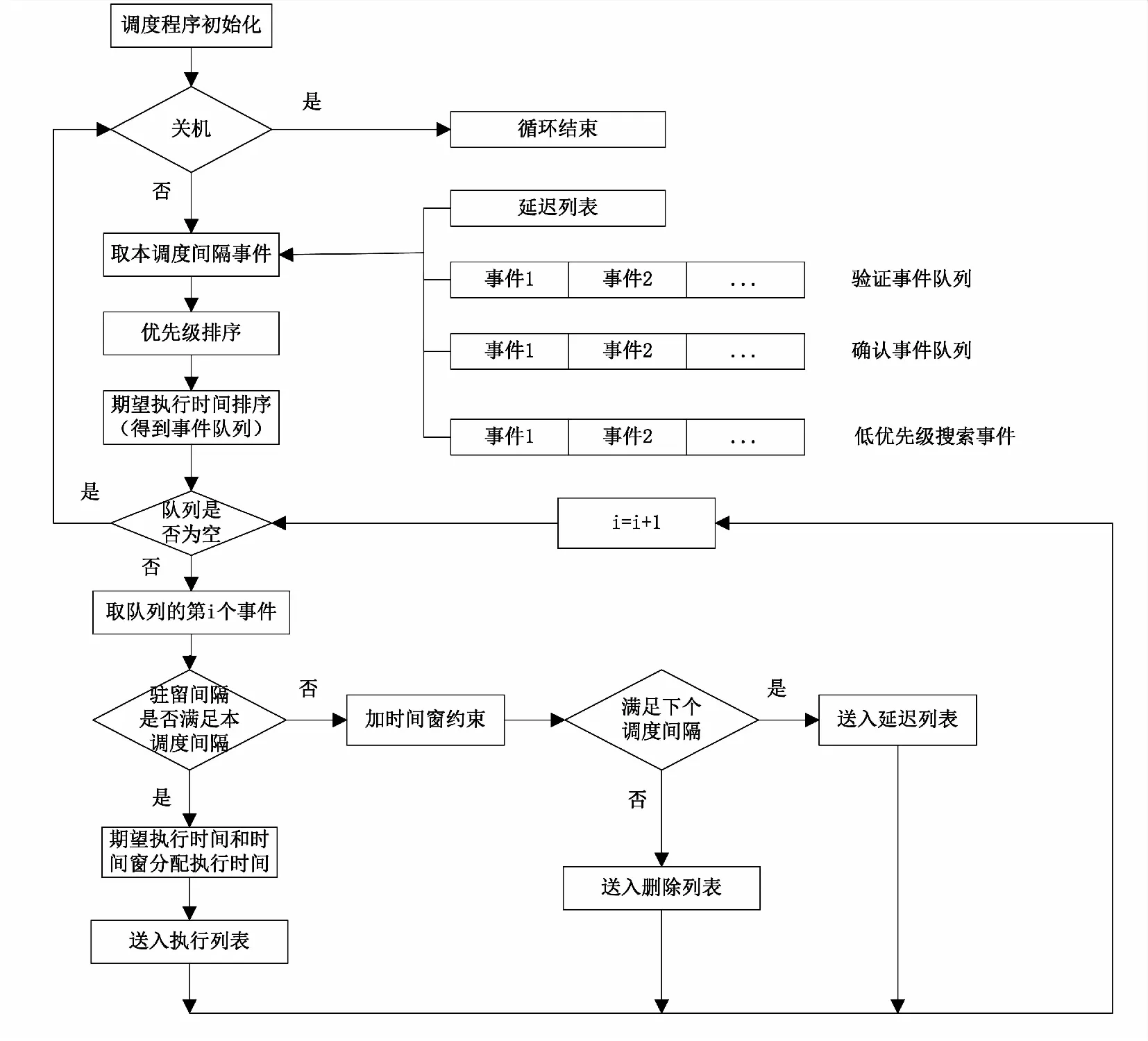
圖6 調度流算法流程
3 實現(xiàn)
中心機作為核心控制系統(tǒng),功能眾多,操作復雜,處理信息量大,其處理實時性直接影響到系統(tǒng)精度。因此,其硬件架構為基于VPX總線的高性能單板計算機,采用PowerPc2020處理器(主頻1GHz),軟件采用Workbench工具開發(fā),運行VxWorks系統(tǒng),具有搶先式多任務處理和出色的可靠性和實時性的特點。利用該嵌入式操作系統(tǒng),中心機軟件從架構上采用分層模塊化設計,采用自適應調度技術,完成系統(tǒng)資源規(guī)劃和分配。
運行后,中心機能夠穩(wěn)定高效調度任務,系統(tǒng)實時性和資源滿足要求,雷達系統(tǒng)對外探測結果如圖7所示。

圖7 雷達探測結果
4 結束語
本文論述了某二維相控陣雷達中心機的設計思路和實現(xiàn)方案,對設計中任務優(yōu)先級規(guī)劃和模式轉化、資源調度策略等關鍵問題進行重點闡述并給出實現(xiàn)流程圖。通過雷達實際飛行試驗,驗證了在中心機的控制下,雷達能夠對空地目標穩(wěn)定搜索與跟蹤,對外部干擾實施良好有效檢測,總體性能表現(xiàn)出色。試驗結果表明,合理規(guī)劃中心機任務優(yōu)先級與調度策略,使其能夠正常穩(wěn)定工作,對相控陣資源進行綜合調度與管理,能夠實現(xiàn)對頻率、能量、空間、時間的均衡配置,滿足對地、對空、被動探測等探測功能需要,方案具有較強工程價值。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32