炮位偵察校射雷達TAS與TWS并行運行算法
2022-10-12 11:46:54周永偉宋思盛
火控雷達技術 2022年3期
姜 洋 周永偉 宋思盛
(西安電子工程研究所 西安 710100)
0 引言
炮位偵察校射雷達在工作時,在其指定工作區域建立搜索屏,當有穿過搜索屏的彈丸目標時,將其捕獲并跟蹤。一般以TAS方式運行,通常包括搜索、確認、跟蹤三種功能的波束,搜索到目標時,發射(2~4)個確認波束獲取更多的目標信息,再轉入跟蹤,文獻[1-3]中論述了TAS的最優自適應波束調度算法。實彈射擊期間,當搜索屏內有飛行器、飛鳥、車輛、高鐵等運動目標時,導致某些個搜索波位不停地搜索到目標并進行確認,跟蹤一段時間后判斷為非彈丸類目標時,再停止跟蹤;之后,又搜索,又確認,如此周而復始,嚴重浪費系統的時間資源。對服役我國部隊的幾型炮位偵察校射雷達在演習過程中的調研結果也表明,復雜的戰場環境使搜索數據率嚴重降低,幾乎不能再搜索到真正的彈丸目標,無法完成作戰任務。
目前,炮位偵察校射雷達在以TAS方式運行時,為了保證搜索數據率,主要采取兩種技術手段:一是通過增加雷達能量資源,展寬方位波束寬度使搜索空域內安排更少的波位,從而減小幀掃時間,但是會付出增加雷達設計難度和成本的代價;二是根據目標的某維特征(濾波器號、幅度等)不滿足要求時進行硬性摳除,但是以犧牲檢測概率為代價的。兩種手段能夠使數據率得到相應的得益,也要付出一定代價,往往是在得益和代價中尋求一種平衡,不能實際發揮雷達的所有潛力,而且更為復雜環境下,也不能保證完成作戰任務。
1 TAS與TWS模式分析
縱觀國內外所有雷達,無外乎TAS和TWS兩種波束調度方式。
TAS方式利用相控陣雷達靈活的波束調度優勢,一邊發射搜索波束,一邊發射跟蹤波束對目標實施跟蹤。國內外各型炮位偵察校射雷達絕大多數是以TAS方式設計,該方式對于高速高機動特點的火炮、火箭炮發射的彈丸目標,具有在保證搜索數據率的情況下,使用一層搜索屏就可以將其捕獲并跟蹤的優點,但是TAS受戰場環境影響特別大,若搜索屏內有虛警或非關注運動目標時,搜索數據率會大幅下降,無法完成作戰任務。可見,維持搜索數據率是TAS波束調度方式偵校雷達多年以來一直面臨的重大問題。
(1)

(2)
由式(1)可知,確認波束是影響數據率的主要成分,若能減少虛警或非關注目標發起的確認波束,將大大提升搜索數據率。
TWS方式與TAS相比,只發射搜索波束,沒有確認和跟蹤波束,根據目標運動特征進行關聯濾波、預測,提取出運動目標而過濾掉雜波數據,完成對目標進行跟蹤,多目標能力大大強于TAS,而且它是能保證固定搜索數據率的。彈丸運動過程中,相對雷達俯仰角速度很大,若采用TWS方式,一方面,要保證俯仰上要覆蓋相當大的空域保證跟蹤點數;另一方面,炮位偵察校射雷達在遠區要求的2.5 Hz以上的搜索數據率,近區甚至要求10 Hz以上的數據率,才能保證發現概率。綜合來講,采用TWS方式設計偵校雷達,隨著運動目標速度越高,所需付出的能量資源越大,對迫擊炮還能應付,對于榴彈炮和火箭炮等高速目標跟蹤,是要付出很大設計成本的。
在某些地面偵察雷達中,對TWS建航的航跡,可利用TAS實施精密跟蹤,它是利用低速目標特性,在保證TWS的數據率的前提下,對有限的幾個航跡進行TAS跟蹤,顯然該方式也不適用于對付高速目標的炮位偵察校射雷達。
通過以上分析,使用TAS方式設計炮位偵察校射雷達是一種綜合優選方案。因此,國內外炮位偵察校射雷達基本都是以TAS方式運行的,當TAS遇到設計瓶頸時,雷達設計師總是希望采用TWS方式的固定數據率優點進行突破,由于受到資源、算法、成本等種種因素的制約,國內并沒有這類產品,美軍的TPQ-50型偵校雷達以TWS方式設計的炮位偵察校射雷達,但是效果也并不理想。
2 TAS與TWS并行運行算法
本文就針對以上分析的問題,在以TAS方式運行的炮位偵察校射雷達,將TWS嵌入其中,使TAS與TWS有機結合,并行運行于一部炮位偵察校射雷達中。將TWS嵌入后,對原有的TAS波束調度策略、過程不會產生任何影響,而是加大了利用搜索波束檢測信息的力度,充分發揮了各自優勢。
參照圖1,對TAS與TWS并行運行算法如何實現進行敘述。
1)TAS建航航跡存儲在TAS跟蹤隊列(以下簡稱“A隊列”)中,對于A隊列中的目標,每跟蹤一次即通過運動特征進行目標識別,若判別為非彈丸類目標時,將其從A隊列中刪除,插入TWS跟蹤隊列(以下簡稱“W隊列”)中,因航跡已經不在A隊列中,所以波束調度器便不再發射跟蹤波束。考慮82 mm迫擊炮彈、120 mm迫榴炮彈、122 mm榴彈、155 mm榴彈、122 mm火箭彈五種彈丸目標的運動特征,滿足以下幾種條件時,可認為TAS跟蹤的目標為非彈丸目標:①目標經過搜索、確認,解多普勒速度模糊后,多普勒速度<8 m/s;②通過TAS跟蹤點(跟蹤濾波器收斂,一般可選擇5~8)后,垂直方向速度<20 m/s;③計算垂直方向速度的移動平均值,EMA(,)<5 m/s,考慮到彈丸弧頂運行特征,≥12。
2)之后,在時刻發射搜索波束,經過數據處理,得到待確認目標,使用的測量值在W隊列中進行檢索,確定與W隊列中某航跡具有相關的可能時,利用在發射波束時刻的預測值與的測量值計算馬式距離,若≤e(e根據雷達自身精度進行確定),則表明是航跡上的一個值,采用更新迭代濾波器,完成一次航跡的TWS跟蹤,并將從待確認目標中刪除。若波束中仍有其他待確認目標,則重復以上過程,直到所有待確認目標遍歷完成。
3)若W隊列中的航跡沒有在時刻完成一次TWS跟蹤,利用與航跡最后一次跟蹤時刻進行對比,若超出設定的時間,表明該航跡跟蹤結束,將該航跡從W隊列中刪除。
通過以上步驟,大大降低了對本次搜索進行確認的可能性,不發送確認波束也就大大節省了時間資源,提高了搜索數據率。
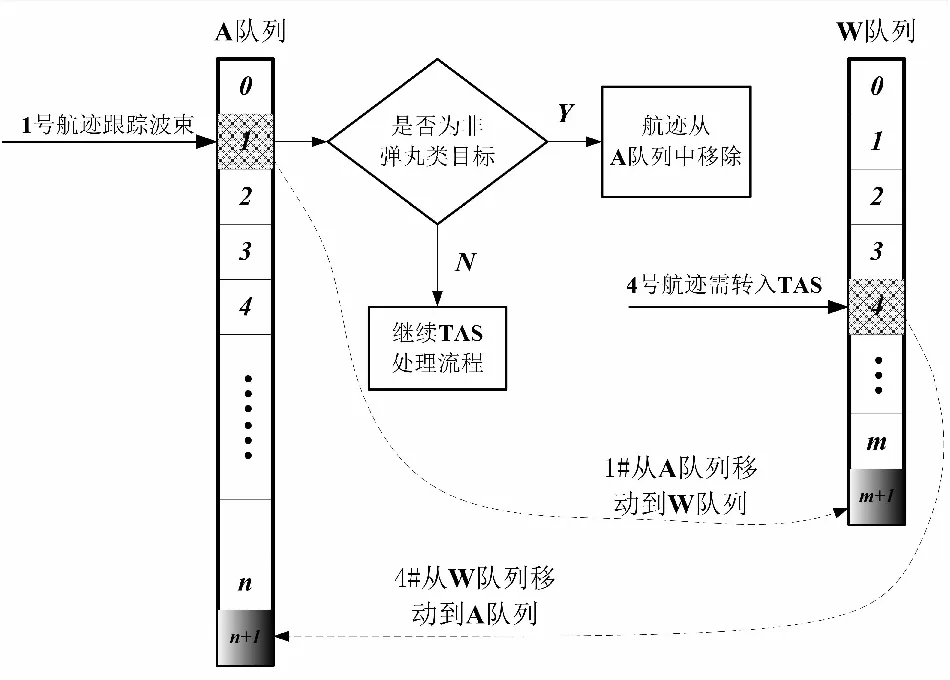
圖1 TAS與TWS并行運行示意圖
因為TAS模式一般只有一層搜索波束,其覆蓋空域較小,TWS航跡在此區域內運動一段時間后,便超出搜索波束的檢測范圍。因此,每進行一次TWS跟蹤后,對其跟蹤質量進行評估并及時反饋到終端,當某航跡即將超出檢測范圍,但操作手認為本航跡對戰場態勢分析有很大作用,可將其從W隊列移動到A隊列中,波束調度器再按其運動特性適時發送跟蹤波束,確保本航跡持續跟蹤下去。同樣,操作手也可將A隊列中的非彈丸目標移動到W隊列中。
3 驗證與優點分析
通過以上分析,以TAS方式運行的炮位偵察校射雷達,將TWS嵌入其中,減少了確認波束,根據式(1),能夠提高雷達搜索數據率是顯而易見的。本算法是在不改變原有TAS的調度策略的前提下,實現TAS與TWS并行運行在炮位偵察校射雷達中,原理正確,實現簡便。該算法已應用于某型炮位偵察校射雷達,在實際作戰環境下,雷達搜索點跡型顯示見圖2,圖3為TWS跟蹤航跡型顯示。可見,采用該算法后,圖3中正在進行TWS跟蹤的航跡,當搜索波束再次發現后,不再進行確認。在圖2所顯示的強雜波環境下,不使用本文算法時的數據率見圖4所示,而在使用本算法后,雷達搜索數據率一直比較穩定的維持在較高數據率的水平上,見圖5所示。
通過雷達實際作戰環境下的驗證,證明該算法原理正確,確實能解決TAS方式運行的炮位偵察校射雷達遇到的問題。而且,該算法還至少具有以下優點:
1)充分發揮了TAS與TWS各自優勢,使炮位偵察校射雷達設計不必在TAS與TWS兩種方式中糾結;
2)可人為地將航跡跟蹤方式在TWS和TAS之間無縫轉換;
3)TWS跟蹤的航跡在終端中繪制或上報到上級、友鄰等戰斗部,有利于分析戰場態勢和滿足聯合作戰的需求,使炮位偵察校射雷達的功能得以擴展;
4)嵌入TWS對TAS波束調度策略、過程不會產生任何影響。因此,可在不增加硬件成本的情況下,僅通過軟件升級,就能對現有雷達進行改進,大幅提升雷達適應復雜戰場環境的能力;
5)對于一些TWS模式的防空雷達,可以對空域的波束進行稀疏排布,也能減少幀掃時間,提高數據率;
6)大大降低雷達的設計難度和成本。
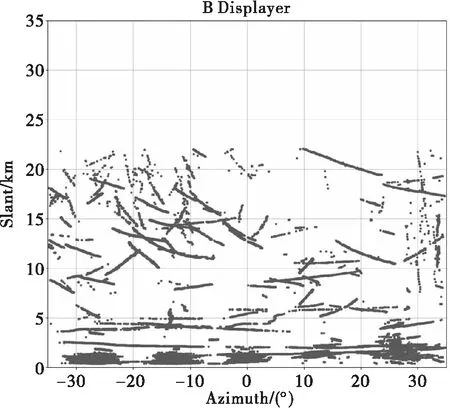
圖2 搜索點跡B型顯示
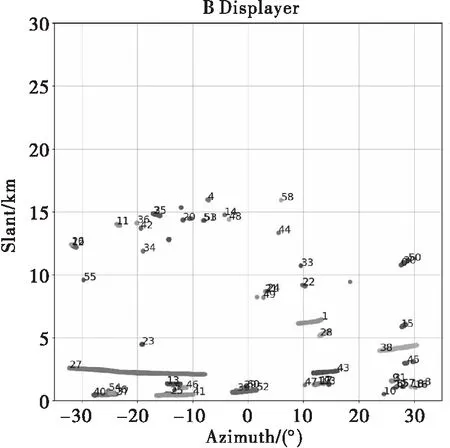
圖3 TWS跟蹤航跡B型顯示

圖4 不采用本文算法時的雷達搜索數據率

圖5 采用本文算法后的雷達搜索數據率
4 結束語
在炮位偵察校射雷達中,將TWS嵌入TAS中,使TAS與TWS有機結合,并行運行于一部炮位偵察校射雷達中,通過雷達在實際作戰環境中驗證,大大降低了對非彈丸類目標的確認,提高了搜索數據率,使炮位偵察校射雷達不再受戰場中非彈丸類目標的干擾。另外,通過對算法的優點分析,使用該算法也可滿足不同的戰場需求。