主動攔截防護系統坐標變換方法研究
2022-10-12 11:38:16劉昭濤陳日明黃家露
火控雷達技術 2022年3期
劉昭濤 陳日明 黃家露
(中國北方車輛研究所 北京 100072)
0 引言
主動攔截防護系統是新一代坦克裝甲車輛綜合防護系統中的重要組成部分,其屬于硬殺傷防護系統,用于在敵方反坦克彈藥擊中車輛前對其進行摧毀攔截。該系統主要由三部分組成:第一部分為超近程探測雷達,負責精確測量來襲目標的運動參數;第二部分為主控制器,負責外推來襲目標的彈道、計算攔截點并控制發射轉臺將攔截彈藥對準來襲目標并進行點火發射;第三部分為轉臺及攔截彈藥,負責響應主控制器的決策并可靠發射對來襲目標進行摧毀。
為了實現對坦克裝甲車輛的全方位防護,通常需要在車體不同方位上安裝多部超近程探測雷達。同時,為了實現精確攔截,發射轉臺需要控制攔截彈藥發射的角度。因此需要對主動攔截防護系統的多部超近程探測雷達與發射轉臺進行坐標變換。
1 主動攔截防護系統中的坐標系
新一代坦克裝甲車輛主動攔截防護系統的工作流程如圖1所示。分布在車體四周的多部超近程探測雷達對周邊空域進行邊搜索邊跟蹤,當發現有來襲目標時立刻進行數據預處理并將航跡數據上報至主控制器;主控制器通過航跡數據進行威脅判斷與決策,計算得到發射轉臺應該調轉的方位角和俯仰角,以及相應攔截彈藥的點火時刻并給出點火信號;攔截彈藥在收到點火信號后進行發射,對來襲目標進行毀傷。
圖1 主動攔截防護系統工作流程
以國外公開的主動攔截防護系統為例,其安裝俯視示意如圖2所示。
圖2 主動攔截防護系統安裝俯視圖
由圖2可以看出,主動攔截防護系統的四部超近程探測雷達和一部發射轉臺安裝在坦克的炮塔上,可以隨炮塔轉動。四部雷達探測不同的區域,組合起來可以實現車體四周360°全覆蓋;發射轉臺為隨動式二維轉臺,可以控制攔截彈藥在方位向和俯仰向進行轉動,實現相應的攔截位置指向。
超近程探測雷達測量目標的坐標系為球面坐標系,其在直角坐標系下的關系如圖3所示。其中軸方向為雷達陣面法線方向(方位角俯仰角均為0),軸方向為方位角90°方向,軸方向為俯仰角90°方向。
圖3 雷達測量坐標系
設某一雷達(=1,2,3,4)測量點的距離為,方位角為,俯仰角為,考慮到軸方向為雷達方位角90°方向,可以得到雷達測量坐標系與空間直角坐標系的關系如式(1)所示。四部超近程探測雷達的測量球面坐標系的原點為相應雷達陣面法線的起點,其與空間直角坐標系的關系均為式(1)所示。
(1)
發射轉臺為二維轉臺,其瞄準坐標系亦為球面坐標系,可以規定發射轉臺旋轉中心為0點,沿坦克炮管方向瞄準時為軸方向,發射轉臺旋轉方位角90°(俯視沿炮管向左90°)為軸方向,發射轉臺俯仰角90°為軸方向。那么,發射轉臺瞄準坐標系一點的距離為,方位角為,俯仰角為,與其空間直角坐標系(,,)的關系亦為式(1)。數學上易得發射轉臺空間直角坐標系到其瞄準球面坐標系的關系如式(2)所示。
(2)
在主動攔截防護系統工作時,為了使發射轉臺精確地指向來襲目標的位置,需要將在雷達測量坐標系下的航跡數據變換到發射轉臺瞄準坐標系下,然后再進行濾波和外推。因此考慮先將雷達測量球面坐標系由式(1)變換到空間直角坐標系,然后通過坐標系的平移和旋轉轉換到發射轉臺的空間直角坐標系下,最后再由式(2)變換至發射轉臺的瞄準球坐標系下。
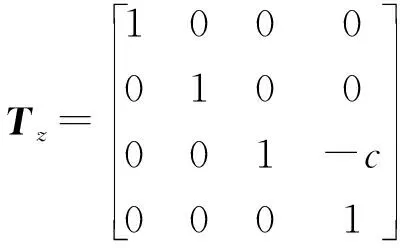
考慮直角坐標系下空間一點(,,),將其坐標系沿軸正方向平移一段距離,則其在新的坐標系中的坐標(′,′,′)可由矩陣形式(3)給出。
(3)
其中為沿軸平移的變換矩陣。類似的可以得出沿軸平移距離的平移變換矩陣,以及沿軸平移距離的平移變換矩陣如式(4)、式(5)所示。
(4)
(5)
考慮直角坐標系下空間一點(,,),以軸正方向為軸線,將其坐標系向右手法則確定的正方向旋轉一個角度,則其在新的坐標系中的坐標(′,′,′)可由矩陣形式(6)給出。
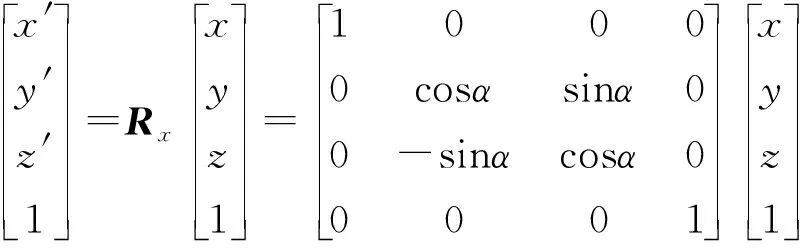
(6)
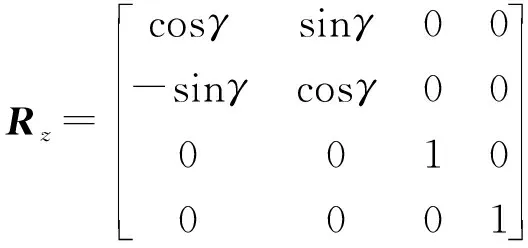
其中為沿軸旋轉的變換矩陣。類似的可以得出沿軸旋轉角度的旋轉變換矩陣,以及沿軸旋轉角度的旋轉變換矩陣如式(7)所示。
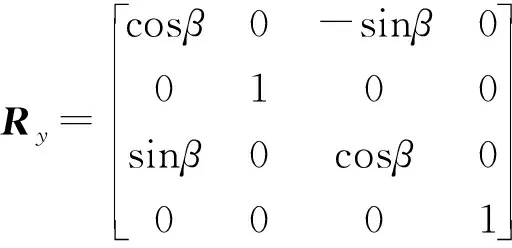
(7)
(8)
那么,某一空間直角坐標系中的一點=[1]經坐標的平移和旋轉后,在另一空間直角坐標系中的坐標′一般形式為
′=
(9)
式(9)中坐標變換過程中相乘的矩陣可以定義為空間直角坐標系的變換矩陣。那么,只要確定了主動攔截防護系統中的每部超近程探測雷達與發射轉臺之間的坐標變換矩陣,就可以通過式(9)得到發射轉臺坐標系下的來襲目標航跡。
2 變換矩陣的求解
當主動攔截防護系統在車體上安裝好之后,每部超近程探測雷達與發射轉臺的坐標變換矩陣就已經確定了。但系統安裝在坦克裝甲車輛上時,其各個方向的旋轉量和平移量不容易準確測量得出,因此我們考慮用兩個坐標系下測量若干個共同觀測點坐標的方法確定不同雷達相對于發射轉臺的變換矩陣。將式(9)重新寫成式(10)形式。

(10)
其中,為三階旋轉變換矩陣,為平移向量,=[]、=[′′′]分別為雷達坐標系和發射平臺坐標系下對應點的坐標,則給出不共線的三組對應點坐標,即可確定坐標變換矩陣。
在工程實踐中,我們可以利用目標模擬器在雷達遠處產生一個固定目標,讀取相應的雷達觀測點的距離、方位角、俯仰角,并利用式(1)解算出其在直角坐標系中的坐標;同時,在發射轉臺上安裝瞄準鏡和測距儀,讀取瞄準鏡觀測目標模擬器發射天線時轉臺的方位角與俯仰角,并利用測距儀測量轉臺到目標模擬器發射天線的距離,然后利用式(1)解算出其在直角坐標系中的坐標。這樣就可以得到一組共同觀測點的坐標和。超近程探測雷達與發射轉臺共同觀測點的測量方法如圖4所示。
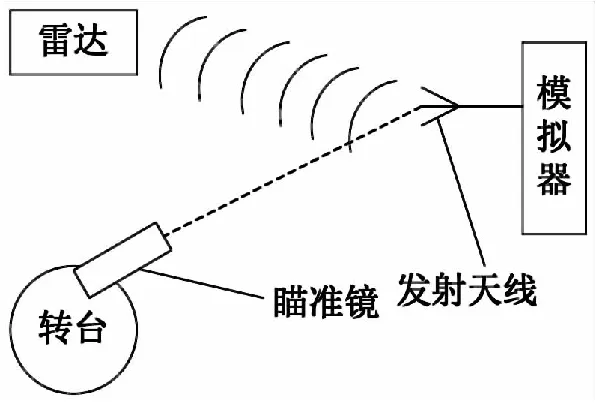
圖4 共同觀測點測量方法
由于實際測量中誤差的引入,對每部雷達應取盡可能多的觀測點,對式(10)進行最小二乘擬合,從而求解出坐標變換矩陣。此時,最小二乘問題如式(11)所示。
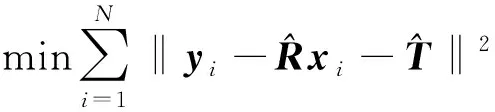
(11)
令
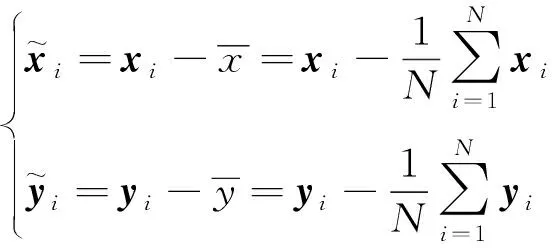
(12)
則根據最小二乘解的性質,式(11)等價于

(13)
令

(14)
則式(13)等價于最大化矩陣的跡為

(15)
對奇異值分解為=,易得滿足式(15)的旋轉矩陣估計值為

(16)
則平移向量估計值為
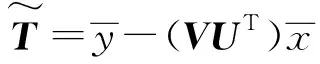
(17)
通過上述分析,我們可以總結出主動攔截防護系統坐標變換矩陣的求解方法如下:
1)在主動攔截防護系統安裝完成后,利用目標模擬器,測出每部雷達與發射轉臺的若干組共同觀測點;
2)用式(1)求得共同觀測點分別在雷達和發射轉臺直角坐標系下的坐標值;
3)用式(16)~式(17)求出每部雷達相對于發射轉臺的坐標變換矩陣。
當主動攔截防護系統工作時,主控制器收到雷達上報的航跡數據,先用式(1)變換成相應的空間直角坐標系,再通過對應雷達的變換矩陣,利用式(10)求出來襲目標在發射轉臺直角坐標系下的坐標,最后用式(2)將其變換為發射平臺瞄準球坐標系下的位置。當同時有兩部雷達觀測到來襲目標時,兩部雷達通過各自的變換矩陣求得目標在轉臺坐標下的坐標值,然后再進行目標數據融合并進行數據處理。
3 實測數據
結合上節所述的方法,我們在某模擬平臺上對某型主動攔截防護系統進行了數據實測。用目標模擬器對某一安裝位置的超近程探測雷達與發射轉臺進行了3個共同觀測點的測量,其測量值如表1所示。
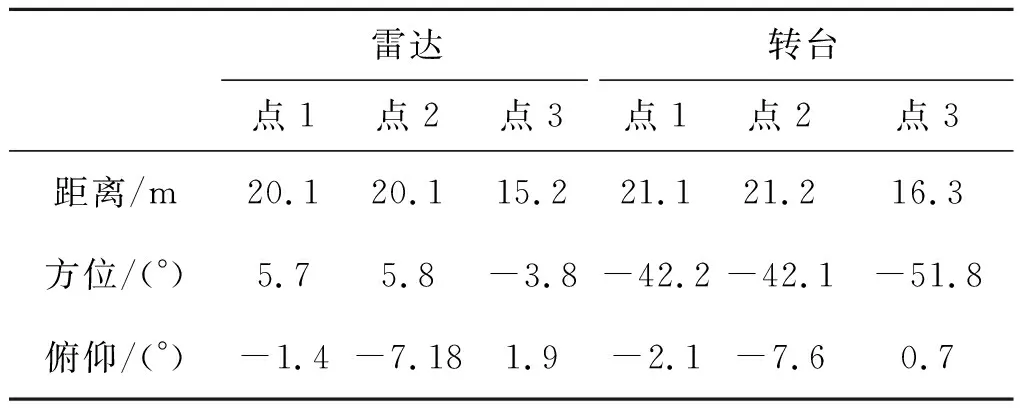
表1 共同觀測點測量值
利用上節述所方法可以求得旋轉矩陣和平移向量。其中
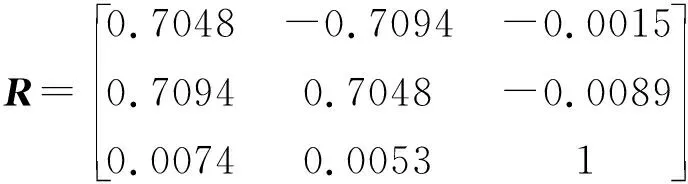
(18)

(19)
隨后,對主動攔截防護系統進行模擬目標探測試驗,得到超近程探測雷達的目標測量值和經坐標變換后發射轉臺瞄準方向如圖5所示。
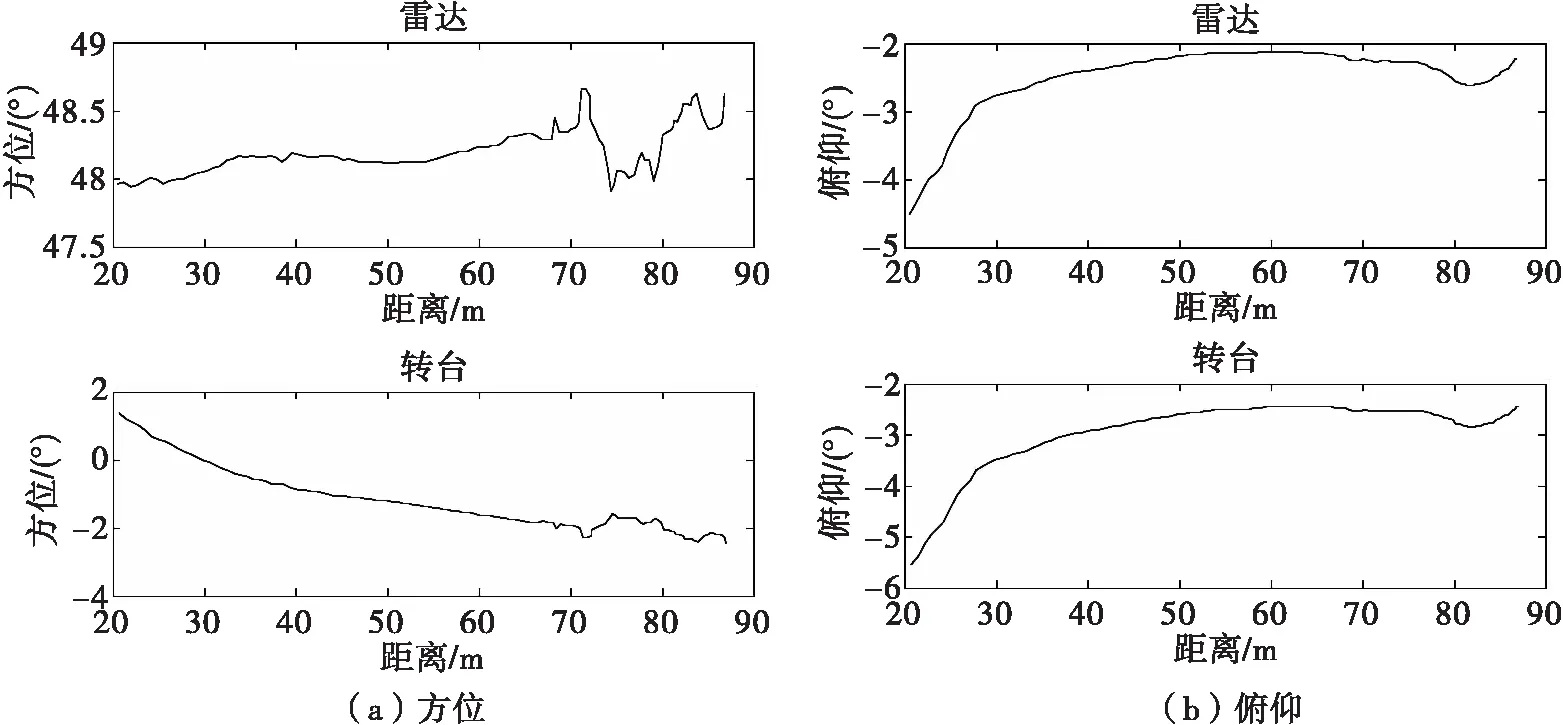
圖5 雷達與轉臺的方位和俯仰
經實際測量,上節所述坐標變換方法能夠使主動攔截防護系統發射轉臺可靠指向雷達上報的目標來襲方向。
4 結束語
坦克裝甲車輛主動攔截防護系統是一個小型的超近程反導系統,其中多部超近程探測雷達與發射轉臺需要進行坐標變換以進行準確攔截。在分析了探測雷達和發射轉臺各自的坐標系后,對其坐標變換矩陣的公式進行了推導。并給出了實際工作中求解坐標變換矩陣的方法,以及主動防護攔截系統應用坐標變換的工作流程。該方法已經在某型主動攔截防護系統中得到了應用。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21