分布式驅(qū)動電子差速控制策略
2022-09-28 09:51:46連晉毅
計算機仿真 2022年8期
李 杰,連晉毅,馮 瑞,尚 樂
(太原科技大學(xué)機械工程學(xué)院,山西,太原 030024)
1 引言
新能源汽車和互聯(lián)網(wǎng)是大家熱議的話題,分布式電動汽車作為新能源汽車主要的方向。具有車身自由度大,傳動效率高,可以有效對每個車輪結(jié)合不同的工況進行設(shè)計。
近年來,為了提高能源利用率和汽車的行駛性能,有些學(xué)者提出針對難以分析差速系統(tǒng)相對于車輛速度、轉(zhuǎn)向角以及車輛結(jié)構(gòu)的非線性問題,提出了一種用于電動汽車電子差速系統(tǒng)的神經(jīng)網(wǎng)絡(luò)模型[1],提出了一種適用于兩輪獨立驅(qū)動電動汽車的差速控制算法。該算法使用自適應(yīng)觀測器進行直接轉(zhuǎn)矩控制的同時,可估計兩個感應(yīng)電動機的速度和磁通量[2],提出了電子差速和差速輔助轉(zhuǎn)向的協(xié)調(diào)控制方法。通過對左右車輪電機扭矩的重新分配,實現(xiàn)了汽車穩(wěn)定性的協(xié)調(diào)優(yōu)化控制和方向盤輔助轉(zhuǎn)向[3],為了提高可提高電動汽車的行駛穩(wěn)定性,以兩個驅(qū)動輪的滑轉(zhuǎn)率相等為目標(biāo),提出了一種基于滑轉(zhuǎn)率的差動控制策略[4]。為了提高電動汽車轉(zhuǎn)向時驅(qū)動輪的差速控制技術(shù),提出了一種橫擺力矩分配控制策略。該策略采用對橫擺力矩的分配的兩種方法:其一,直接轉(zhuǎn)矩分配,并建立考慮電機故障、路面附著系數(shù)和整車動力性能等約束條件下的轉(zhuǎn)矩分配模型,將汽車轉(zhuǎn)向時所需的橫擺力矩進行直接轉(zhuǎn)矩分配,其二,直接滑動率分配,基于魔術(shù)輪胎公式,確定了車輪滑動率與作用于汽車質(zhì)心處橫擺力矩的關(guān)系,基于此將所需橫擺力矩分配給各車輪,最后采用滑動率追蹤策略對各個車輪進行轉(zhuǎn)矩控制。
2 電子差速轉(zhuǎn)向模型
2.1 電機模型
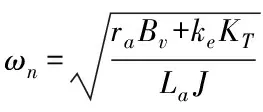
電機選擇BLDC模型,標(biāo)準(zhǔn)的二階系統(tǒng)閉環(huán)傳遞函數(shù)為式(1)

(1)

2.2 二自由度汽車模型
采用線性二自由度汽車模型,如圖1所示[5]。
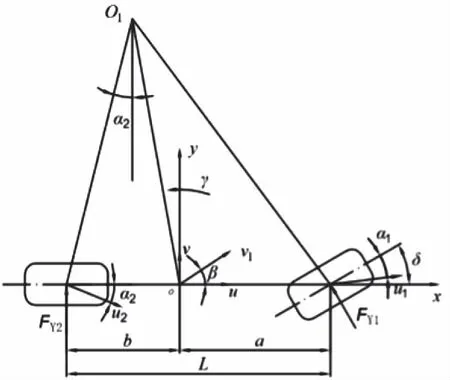
圖1 二自由度汽車模型
運動微分方程的建立過程中需要假設(shè)汽車行駛驅(qū)動力不大,忽略輪胎所受切向作用力及空氣阻力對輪胎側(cè)偏性能的影響,建立運動微分方程如下
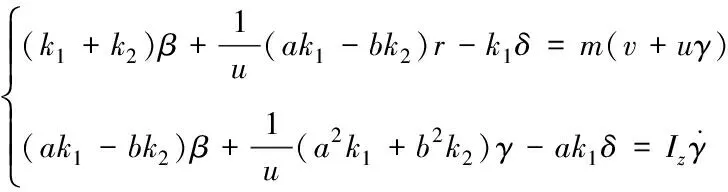
(2)
圖1和式(2)中:l為軸距,u為車速在x軸上的投影;v為車速在y軸上的投影;δ為前輪轉(zhuǎn)角;v1為車輛質(zhì)心速度;α1為前輪側(cè)偏角;u1為前軸中點速度;k1為前輪側(cè)偏剛度;Fy1為前輪側(cè)偏力;a為質(zhì)心到前軸距離;γ為車輛橫擺角速度;α2為后輪側(cè)偏角;u2為后軸中點速度;k2為后輪側(cè)偏剛度;Fy2為后輪側(cè)偏力;β為車輛質(zhì)心側(cè)偏角;b為質(zhì)心到后軸距離;Iz為車輛z軸的轉(zhuǎn)動慣量。
2.3 車輛質(zhì)心側(cè)偏角估計
對質(zhì)心側(cè)偏角的估計采用運動學(xué)方法,其表達示為
(3)
車輛行駛理想模型,當(dāng)車輛穩(wěn)定行駛時,其橫擺角速度為定值,此時有v=0和γ=0[6],因而式可改寫為
(4)
式中K為穩(wěn)定性因數(shù),s2/m2。
汽車?yán)硐霗M擺角速度rd可用下式計算

(5)
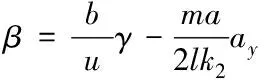
質(zhì)心側(cè)偏角可用下式計算

(6)
車輛在良好的瀝青路面上行駛,其質(zhì)心側(cè)偏角一般不會超過±10°[7],所以綜合上述分析可知,汽車?yán)硐胭|(zhì)心側(cè)偏角為:

(7)
3 電子差速控制策略
3.1 直接轉(zhuǎn)矩分配控制策略
輸出的附加橫擺力矩△M施加到汽車質(zhì)心處,可對各驅(qū)動輪進行橫擺力矩直接轉(zhuǎn)矩分配(DYC+T)控制,且需要把△M優(yōu)先分配到輪胎側(cè)偏角較小的車軸上。當(dāng)輪胎側(cè)偏角較小軸上的力矩不能滿足△M需求時,再將剩余部分分配到另一個車軸上。當(dāng)汽車處于不足轉(zhuǎn)向狀態(tài)時,其前軸側(cè)偏角比后軸大,此時需要將驅(qū)動轉(zhuǎn)矩優(yōu)先施加到后軸。假如后軸無法滿足需求,則將剩余部分的橫擺力矩通過轉(zhuǎn)矩分配到前軸。
對同一軸上兩側(cè)驅(qū)動輪采用同等大小的轉(zhuǎn)矩分配,即分別增大和減小兩側(cè)車輪驅(qū)動轉(zhuǎn)矩,其中△T可通過下式計算
(8)
3.2 直接滑動率分配控制策略
上述直接轉(zhuǎn)矩控制策略是把附加橫擺力矩分配到輪胎驅(qū)動轉(zhuǎn)矩,而此處在得到橫擺力矩△M后,將其直接分配到各車輪滑動率上,也稱直接滑動率分配(DYC+S)。這就應(yīng)該明確汽車質(zhì)心處所需的附加橫擺力矩和各輪胎滑動率改變量之間的關(guān)系。如圖2 所示,為汽車在轉(zhuǎn)向時的受力情況,此處以左前輪為例說明,質(zhì)心處的橫擺力矩ML1與輪胎所受縱向力FxL1及側(cè)向力FyL1的關(guān)系如下[8]

(9)
式中ML1左前輪所受力提供給車輛質(zhì)心的橫擺力矩,N·m;δL1左前輪的轉(zhuǎn)向角,deg
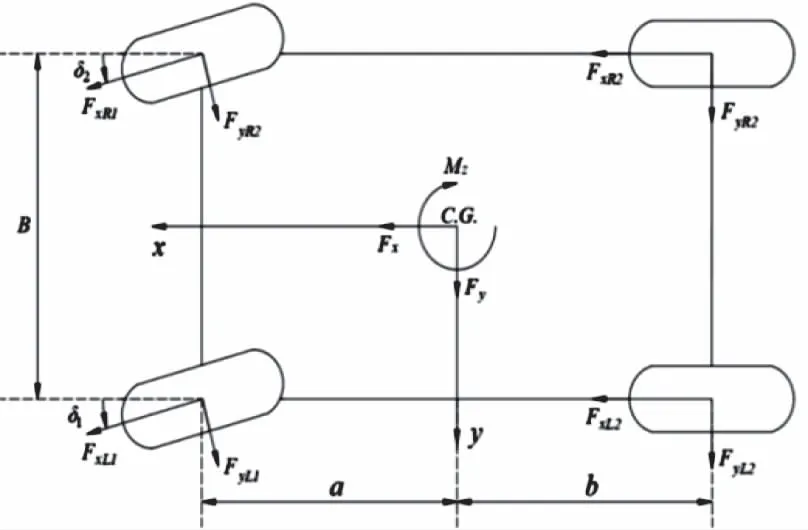
圖2 汽車轉(zhuǎn)向模型
采用典型的“魔術(shù)公式”輪胎模型,輪胎經(jīng)驗?zāi)P推浔磉_式如下[9]
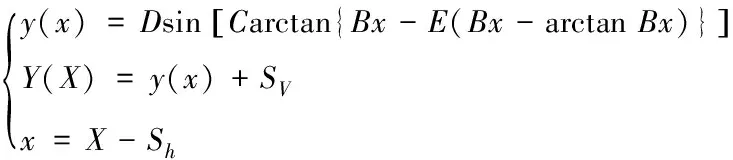
(10)
則輪胎所受地面縱向力和側(cè)向力可如下表示
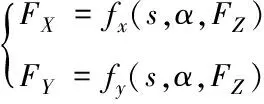
(11)
式中s車輪滑動率;α輪胎側(cè)偏角,deg
此處將滑動率s作為控制量,同時當(dāng)輪胎側(cè)偏角發(fā)生改變時,該輪所受地面力的變化存在延遲滯后,所以在當(dāng)前周期中進行滑動率分配時,需考慮上一周期中α值的改變對輪胎受力的影響,即實時刷新Mz,其表達式為

(12)
式中MZ為當(dāng)前地面對汽車的橫擺力矩,N·m;IZ為汽車?yán)@z軸的轉(zhuǎn)動慣量,kg·
在確定橫擺力矩△M和滑動率s的關(guān)系時,采用如下方程式

(13)
式子中△ML1左前輪滑動率變化后產(chǎn)生的橫擺力矩變化量;SOL1當(dāng)前時刻的車輪滑轉(zhuǎn)率.
類似的有右前輪、左后輪、右后輪有

(14)

(15)

(16)
由此確定車輪滑動率調(diào)節(jié)量和附加橫擺力矩的關(guān)系式如下

(17)
4 仿真與分析
在Carsim /Simulink 聯(lián)合仿真,其中電動汽車聯(lián)合仿真模型見圖3,模型基本參數(shù)見表1[10]。

圖3 電動汽車聯(lián)合仿真模型框圖
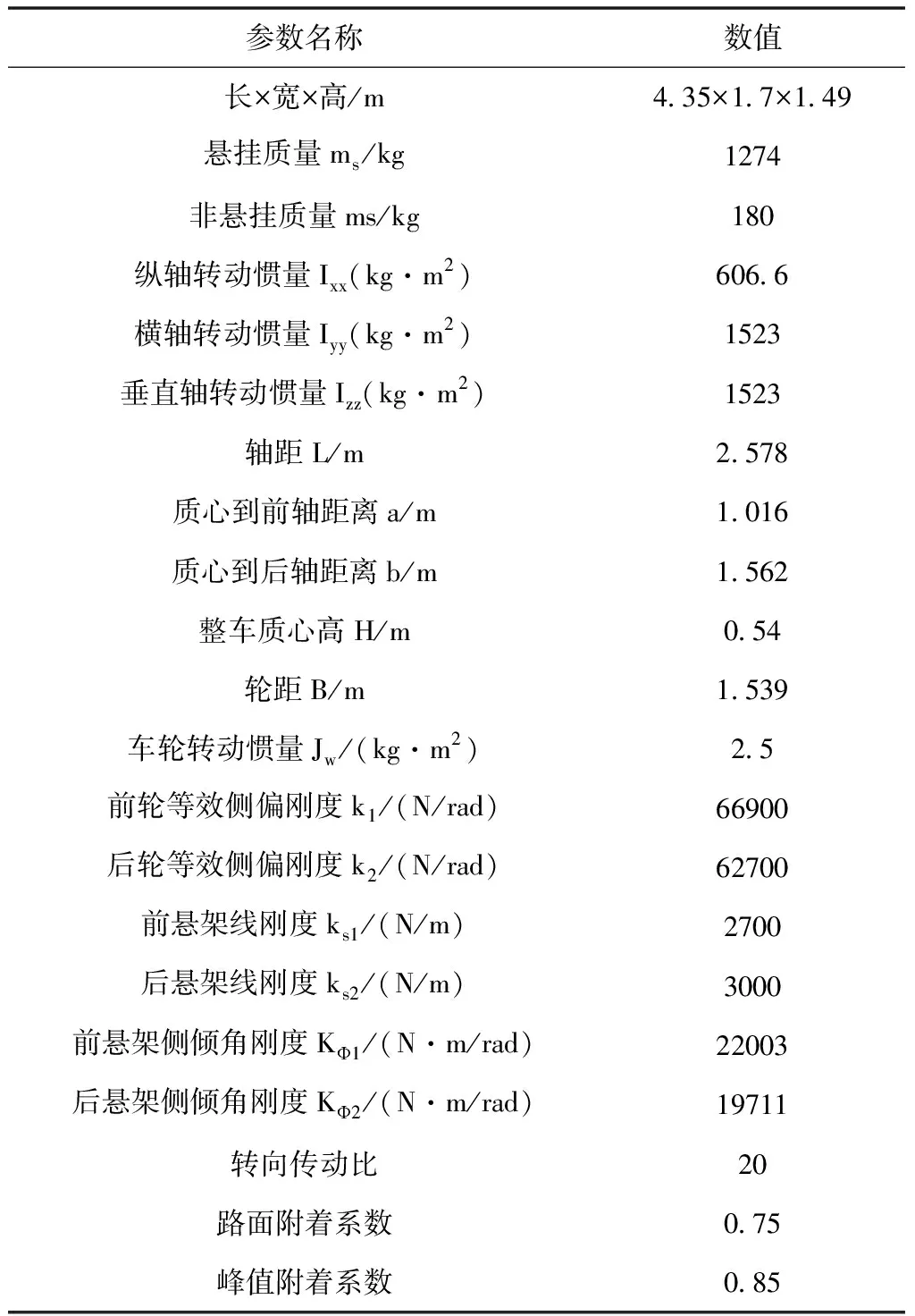
表1 模型基本參數(shù)
4.1 雙移線工況仿真
汽車在水平面上行駛的目標(biāo)軌跡為:首先汽車直行65米,然后向左變道至3.5米處的另一條車道上,最后再回到初始道路上。同時設(shè)定汽車勻速行駛,速度為100km/h,行駛道路為平坦路面。
雙移線工況下兩種策略的橫擺角速度對比曲線如圖4和圖5所示,可見兩者的橫擺角速度都較小,其峰值分別為-0.19 和-0.21,表明 DYC+S 的行車穩(wěn)定性更高。圖5是質(zhì)心側(cè)偏角對比曲線,可以看出兩種策略的質(zhì)心側(cè)偏角均不大,且峰值分別為0.58和0.67,再次證明DYC+S的穩(wěn)定性更好。
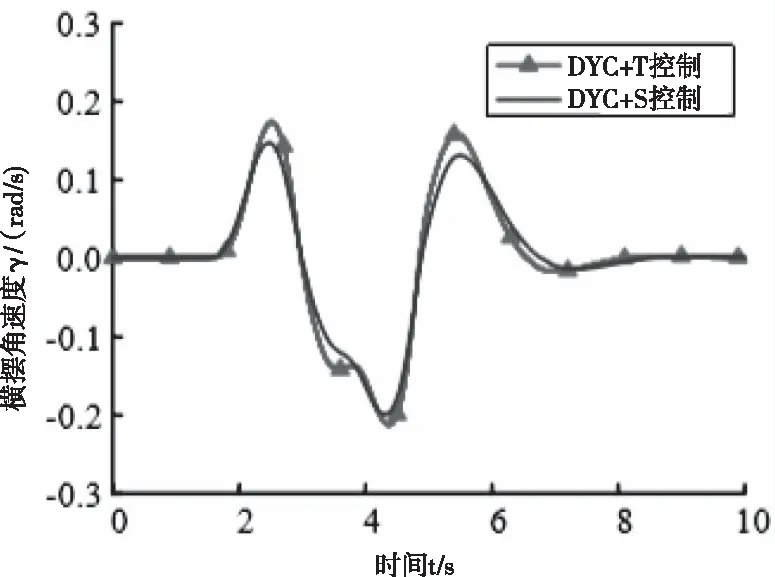
圖4 橫擺角速度曲線
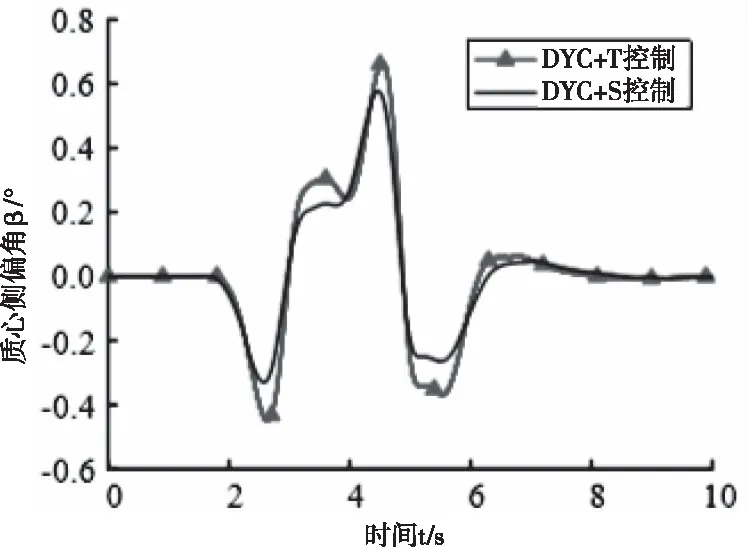
圖5 質(zhì)心側(cè)偏角曲線
4.2 方向盤角階躍輸入仿真
汽車以50km/h的初速度行駛,仿真時間內(nèi)加速踏板開度始終保持在0.2狀態(tài),1秒時開始方向盤轉(zhuǎn)角階躍輸入,到達2秒時完成階躍任務(wù),其中階躍角度為 1rad(約為57.3度),仿真期間的路面附著系數(shù)保持0.75。
由圖6和圖7橫擺角速度曲線和圖質(zhì)心側(cè)偏角曲線可見,汽車在1秒前一直保持直線行駛,從1秒后開始階躍轉(zhuǎn)向,兩種控制策略的橫擺角速度曲線大致相同,其中采用DYC+S控制的橫擺角速度略小于采用DYC+T控制曲線,最大差值僅為0.002rad/s。同時兩種策略的質(zhì)心側(cè)偏角曲線趨勢相同,采用DYC+S 控制的質(zhì)心側(cè)偏角小于采用DYC+T 控制的質(zhì)心側(cè)偏角,兩者的峰值分別為:0.476deg和0.492deg,且兩曲線的最大差值為0.039deg,由此可以看出都可以達到預(yù)期目標(biāo),且采用DYC+S控制穩(wěn)定性更好。
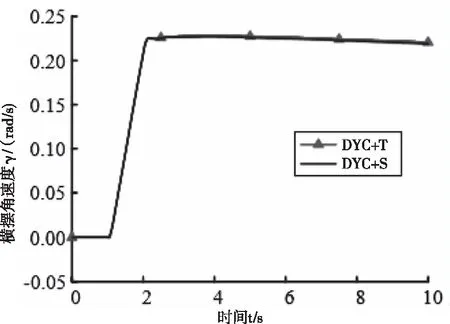
圖6 橫擺角速度曲線
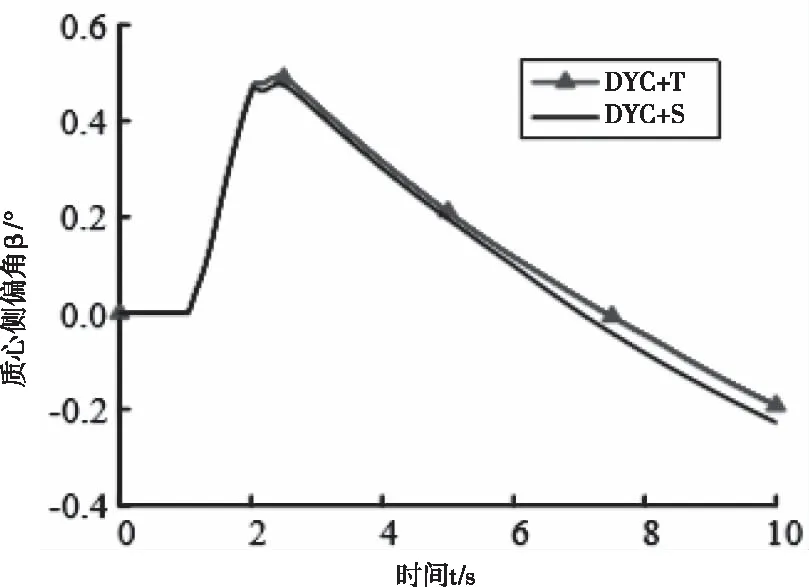
圖7 質(zhì)心側(cè)偏角曲線
4.3 方向盤轉(zhuǎn)角正弦輸入仿真
汽車以50km/h勻速行駛,2秒后進入正弦輸入工況,到10秒時結(jié)束。其中仿真路面的附著系數(shù)為0.75,正弦轉(zhuǎn)角幅值為 60deg,周期為4秒。

圖8 橫擺角速度曲線
由圖8橫擺角速度曲線和圖9質(zhì)心側(cè)偏角曲線可見,兩種控制策略的橫擺角速度曲線趨勢和質(zhì)心側(cè)偏角曲線趨勢都有相同的規(guī)律,其中橫擺角速度的峰值分別為0.22rad/s和0.20rad/s,質(zhì)心側(cè)偏角峰值分別為0.88deg和0.75deg。由此可得采用DYC+S控制時有更加優(yōu)良的穩(wěn)定性。

圖9 質(zhì)心側(cè)偏角曲線
5 總結(jié)
為了提高電動車輪轉(zhuǎn)向時驅(qū)動輪的差速控制,提出了一種橫擺力矩分配控制,采用直接轉(zhuǎn)矩分配和直接滑移率分配的方式,分別采用兩種控制策略在三種不同的仿真工況下進行對比分析,結(jié)果表明模型的可行性及采用直接滑移率分配比直接轉(zhuǎn)矩分配更加優(yōu)越,汽車轉(zhuǎn)向時的行駛穩(wěn)定性和安全性得以保障。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
