動靜態協同耦合無線電能傳輸系統能效分析
2022-09-28 09:28:34郭建武逯柯言
計算機仿真 2022年8期
薛 明,郭建武,逯柯言
(天津工業大學天津市電工電能新技術重點實驗室,天津 300387)
1 引言
無線電能傳輸技術是通過電磁能量耦合以非接觸的形式從電源獲取電能,實現了兩者的電氣隔離,相比于傳統電纜傳輸電能的方式,具有安全、可靠、靈活性高等優點。
2007年美國麻省理工學院科研團隊提出的磁耦合諧振式無線電能傳輸技術,并利用該技術在2m外點亮了燈泡,吸引了學術界的關注,成為了國內外的研究熱點[1-3]。通過對已有文獻資料分析可知,按照收發端的相對位置變化,可將無線電能傳輸技術分為靜態無線充電技術和動態無線供電技術兩種,目前科研人員主要針對靜態負載無線充電或動態負載無線供電等單一受電方式在理論和應用兩方面展開研究。針對靜態負載充電,文獻[4-6]從高頻電源、補償網絡、耦合結構三個不同方向進行了研究。文獻[4]以改進E類放大器作為高頻激勵源建立的磁耦合諧振式無線電能傳輸系統在20cm傳輸距離下,傳輸效率為61%。文獻[5]提出并設計了一種用于恒壓輸入、恒流輸出磁耦合系統的新型補償網絡,其搭建的實驗平臺在負載變化時輸出負載恒流且能實現單位功率因數輸入,系統的傳輸效率可達20%。文獻[6]設計了三線圈結構無線電能傳輸系統并提出一種基于調頻控制的三線圈結構WPT系統效率優化方法,最大效率提升幅度達到了15%。在動態無線供電方面,針對集中式供電導軌效率低、穩定性差等問題,文獻[7]提出了多導軌供電模式的電動汽車無線供電方法,降低了導軌損壞對系統穩定性及導軌損耗對系統效率的影響,但在耦合機構偏移、導軌切換時系統效率波動較大。對此,文獻[8]提出了一次側T型補償拓撲的設計方法,應用該拓撲搭建的系統在側向偏移范圍40%以內能夠平緩由于耦合結構偏移引起的效率波動,穩定90%左右。文獻[9]通過改進接收線圈的結構,使系統效率穩定在70%左右,有效減小了由于導軌切換引起的波動。從以上文獻可知,科研人員在靜態負載充電和動態負載供電方面已取得了諸多有價值的研究成果。
綜上所述,目前國內外學者均聚焦于靜態負載充電或動態負載供電,對于動/靜態負載同時充電與供電的研究比較空缺。因此,本文基于近場諧振原理,提出靜態負載無線充電和動態負載無線供電協同工作模式,即動/靜負載分別位于分段式發射導軌兩側,分段導軌在為動態負載切換供電的同時,在另一側為靜態負載充電。首先,通過互感耦合理論建立了動/靜電磁耦合系統數學模型,基于不同的電磁耦合情形,從時間域和空間域兩個維度研究了多參數作用下系統不同狀態下的能效傳輸特性;其次,對理論分析中獲得的影響能效的重要時變參數耦合系數和品質因數進行分析,得到了動態側和靜態側耦合系數和品質因數在時間域的波動規律;最后,通過實驗驗證了理論和仿真分析的正確性。
2 動態與靜態協同耦合系統建模與分析
2.1 動/靜態協同耦合系統工作過程
動/靜態協同耦合系統靜態無線充電層與動態無線供電層采用同一個能量供給層通過電磁耦合獲取能量,可實現對交通領域中路燈、信號燈和監控設備等靜態負載和電動車輛動態負載同時供電,如圖1所示為動/靜態協同耦合系統。

圖1 動/靜態協同耦合系統
動態無線供電技術的應用中,發射導軌采用分段供電模式,在系統能效、參數敏感性和可靠性等方面具有突出優勢[10-11],在實際工作中,電能發射單元以一定間距成直線排列,交替導通工作,并且每一時刻只有位于動態負載下端的電能發射端元導通工作。因而,本文在動態耦合部分,只需選取分段式發射導軌中單一發射單元工作全周期進行研究,即可獲得動態耦合系統特征參數在時間和空間的波動特性,如圖2所示為單一發射線圈工作周期時刻劃分。通電時刻t1,動態側接收線圈進入發射線圈的供電區域,發射線圈得電;t2時刻,動態側與發射線圈完全對準;斷電時刻t3,動態側接收線圈離開發射線圈的供電區域,發射線圈斷電。靜態側接收線圈位于每個發射單元下方,當發射單元接收到動態負載發送的開啟信號導通工作,動/靜負載通過動態耦合磁場獲取能量。
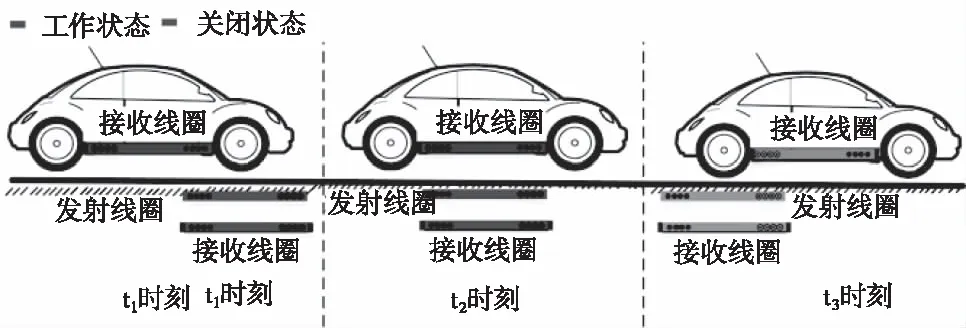
圖2 單個發射線圈的工作周期
2.2 數學模型及分析
圖3為動態與靜態協同耦合系統的等效電路模型,其中,US為系統的高頻逆變電壓,I1、I2和I3分別為發射線圈、動態側接收線圈、靜態側接收線圈的電流值,L1、L2、L3、C1、C2和C3分別為發射線圈、動態側接收線圈、靜態側接收線圈的電感值和補償電容值,R1、R2、R3分別為發射線圈、動態側接收線圈、靜態側接收線圈的等效內阻,Z1和Z2分別為動態側、靜態側接收線圈的負載阻抗,Ma、Mb和Mc分別為發射線圈與兩側接收線圈的互感及兩側接收線圈之間的互感。
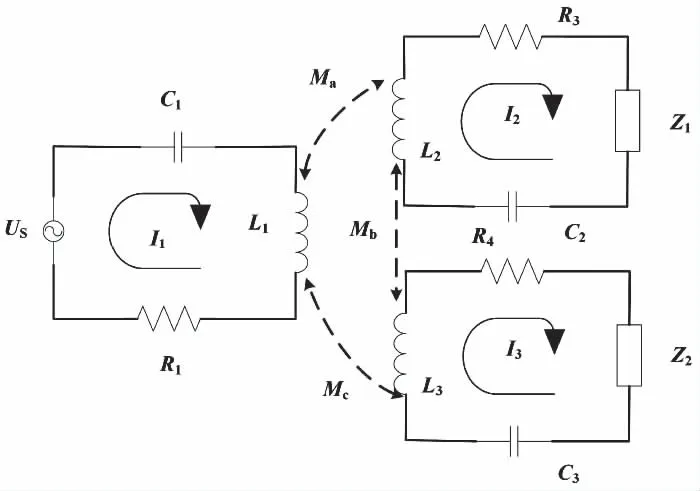
圖3 系統電路模型
根據互感耦合理論,系統狀態方程可表示為
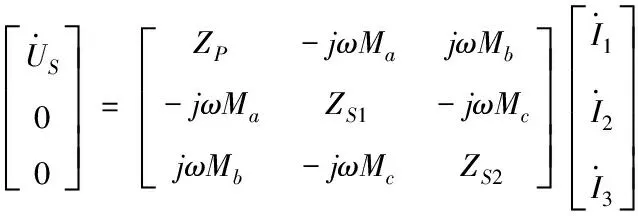
(1)
式中ZP、ZS1和ZS2分別為發射回路、動態側接收回路、靜態側接收回路的總阻抗,分別表示為
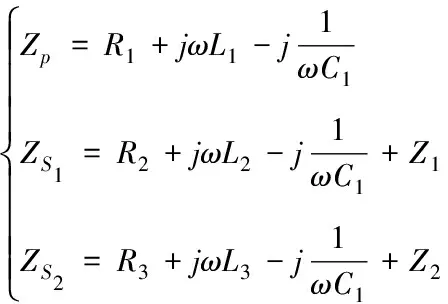
(2)
當發射線圈和兩側的接收線圈發生諧振,負載Z1和Z2為純阻性負載Ra和Rb,系統發射線圈與動態側接收線圈的耦合系數ka、靜態側接收線圈的耦合系數kb及兩側接收線圈之間的耦合系數kc;系統發射回路、動態側、靜態側接收回路的品質因數Q1、Q2和Q3可表征為
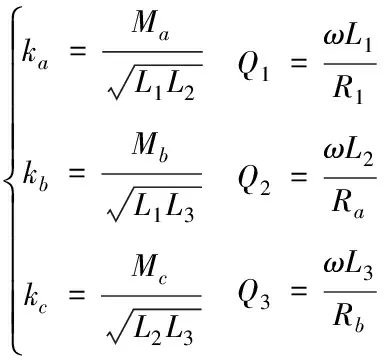
(3)
則系統動態側輸出功率為


(4)
系統靜態側輸出功率為

(5)
系統傳輸效率為

(6)
線圈間的耦合系數主要由互感決定,從文獻[12]可知,互感會隨著線圈間的軸向距離的增加而迅速下降,而在實際工況下動態側和靜態側之間的軸向距離很大,則可不考慮動態側和靜態側接收線圈之間的相互耦合,即kc=0,此時可得
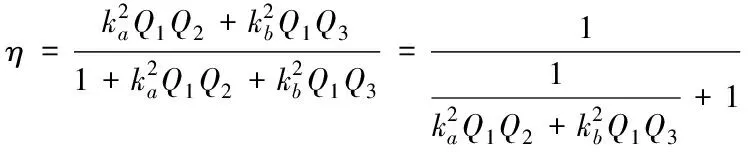
(7)

(8)

(9)
為進行對比分析,本文推導了單一靜態和單一動態負載工作時的系統的功率和效率,如表1。
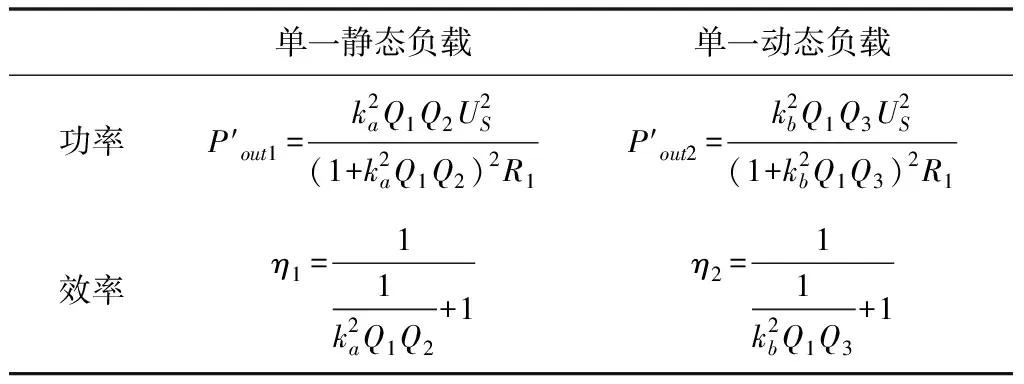
表1 單一靜態/動態負載工作時的系統參數
從式(7-9)和表1可知,動/靜負載同時工作時系統傳輸效率的表達式的分母要比單一動態或動態負載工作時小,但對應側負載接收功率的表達式分母要大。故動/靜負載同時工作時系統傳輸效率要比單一動態或動態負載工作高,但對應側負載接收功率低
3 有限元仿真分析
為了驗證上述理論的正確性,本文借助有限元仿真軟件建立了無線電能傳輸模型(見圖4),系統諧振頻率為85kHz,電源幅值為100V,線圈電感量為109.23μH,由于發射線圈單個工作周期內的磁場分布具有對稱性,故只需在t1-t2時間段進行研究,在仿真中動態接收線圈的位置在t1時刻為-0.15m,t2時刻為0m。
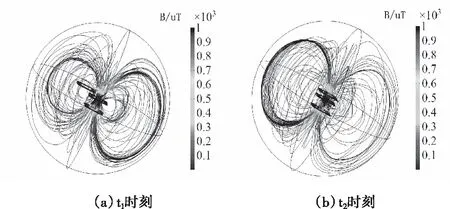
圖4 系統仿真模型
3.1 不同工作狀態對比分析
圖5為系統效率和功率隨動態接收線圈位置變化曲線,可以看出,在t1-t2時間段內動/靜負載同時工作時系統的平均效率要比單一靜態和單一動態負載工作時要高9%和15%,變化趨勢與單一動態負載工作時相同,隨著與發射線圈徑向距離的減小而增大;動/靜負載同時工作時系統的動態負載平均接收功率比單一動態負載工作時低33W,總體趨勢相同;靜態負載接收功率隨著與發射線圈徑向距離減小而減小,與單一靜態負載工作時變化趨勢明顯不同。

圖5 系統效率和功率對比
3.2 靜態側與動態側的相互影響
系統靜態側回路和動態側回路的相互影響,即為靜態側耦合系數kb和品質因數Q3對動態側的影響,以及動態側耦合系數ka和品質因數Q2對靜態側的影響。
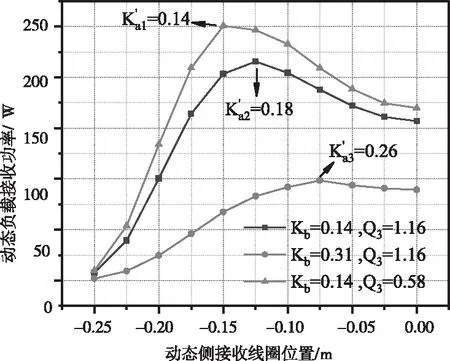
圖6 靜態側對動態側的影響
對式(8)求ka的導數,可得動態側接收線圈和發射線圈的臨界耦合點
(10)


圖7 動態側對靜態側的影響
同理,對式(9)求kb的導數,可得靜態側接收線圈和發射線圈的臨界耦合點
(11)

由以上分析可知,在動態與靜態協同耦合無線電能傳輸系統中,靜態側回路和動態側回路會相互影響,即動態側接收功率與靜態側耦合系數、品質因數成負相關,靜態側接收功率與動態側耦合系數、品質因數成負相關;靜態耦合的存在會使動態側臨界耦合點發生偏移,動態耦合的存在會使靜態臨界耦合點時刻變化。
4 實驗驗證
為進一步驗證理論分析的正確性本文搭建了如圖8所示的實驗平臺,諧振頻率為85kHz,逆變電壓幅值給定為100V,通過人為移動動態接收線圈來達到實驗效果。系統具體參數見表2,其中軸向距離指接收線圈和發射線圈的垂直距離。
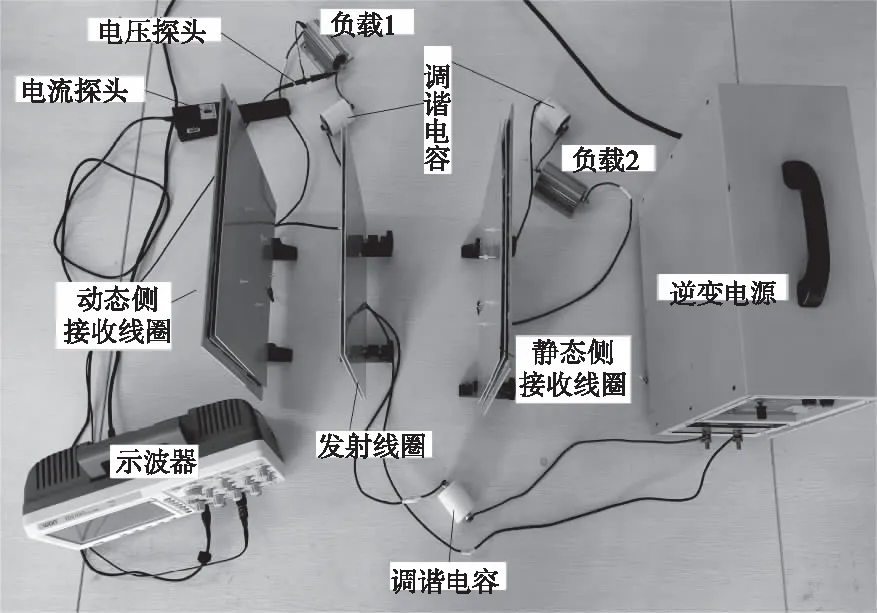
圖8 實驗平臺
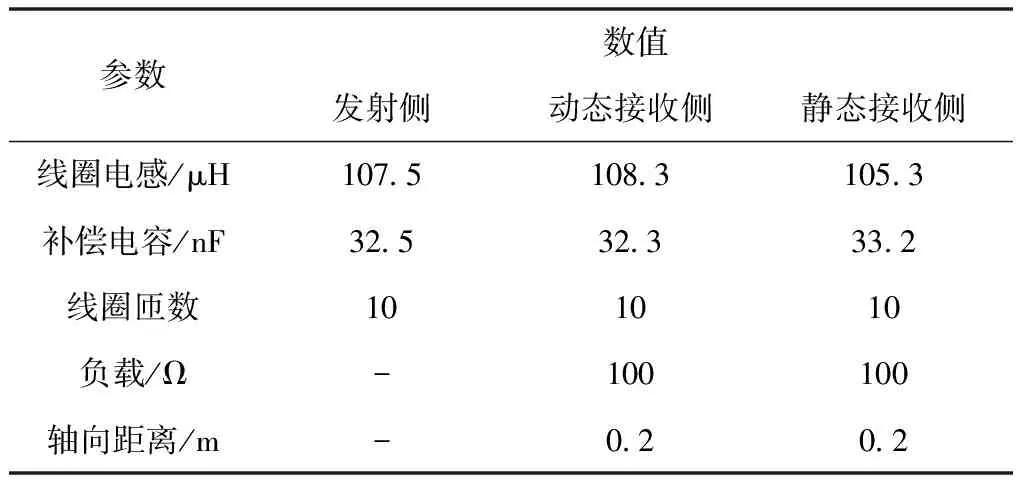
表2 系統仿真參數
在實驗中通過使用不同阻值的無感負載來研究品質因數對系統的影響,記錄實驗數據并進行擬合,可得圖9(圖9d中的d為靜態側接收線圈和發射線圈的軸向距離)。從圖可知,相比單一靜態負載和單一動態負載,動/靜負載同時工作下的系統平均傳輸效率可分別提高8.9%和15%,動態負載的接收功率波動規律不變但平均下降29.32W,靜態負載接收功率變為持續下降趨勢,且系統動態側和靜態側之間的相互影響也與有限元仿真結果具有較好的一致性。
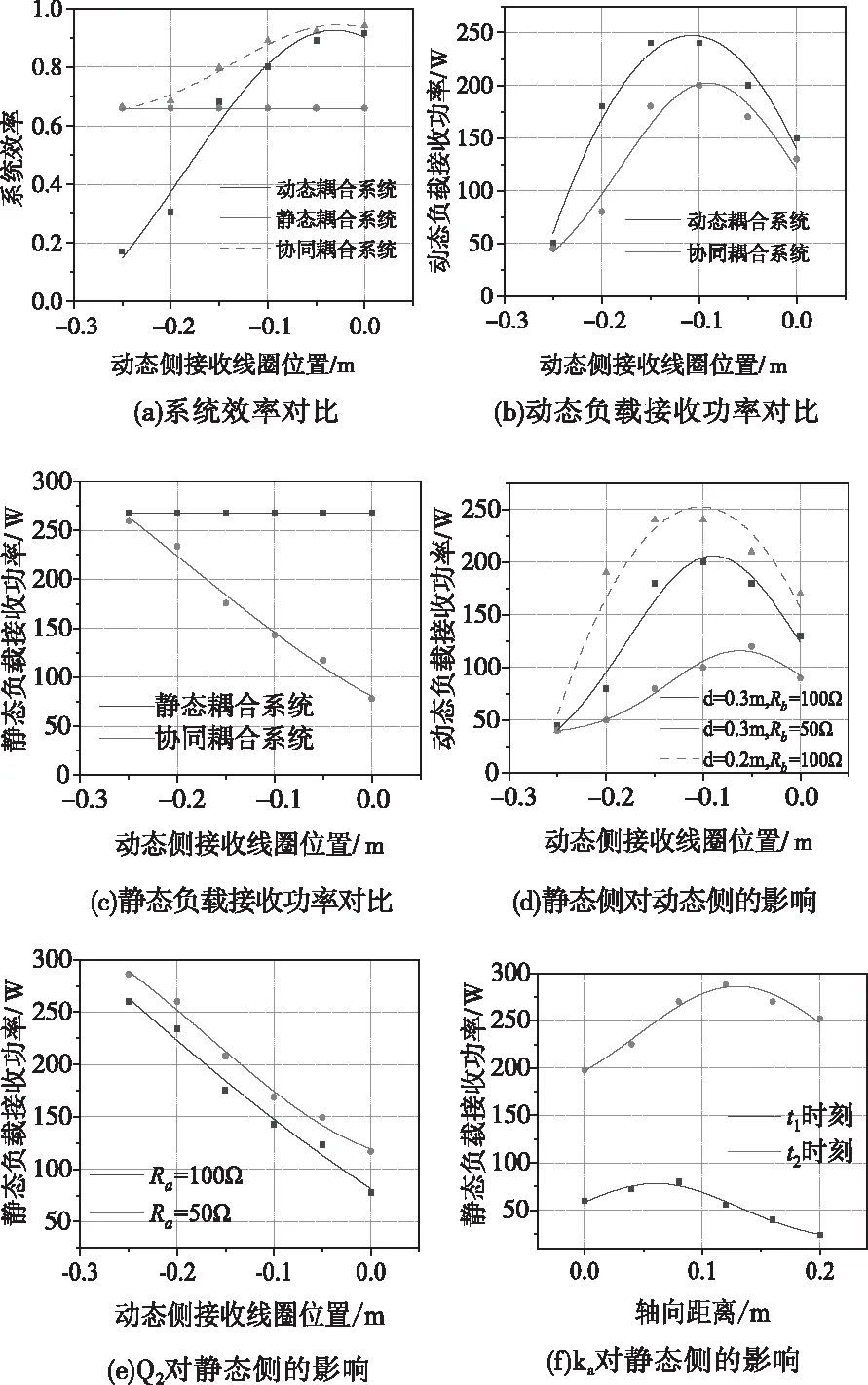
圖9 實驗數據及擬合曲線
5 結論
本文基于近場諧振無線電能傳輸原理,對動態與靜態協同耦合的無線電能傳輸系統進行了深入分析,并通過有限元數值計算的方法對系統不同工作狀態及動態與靜態之間的相互影響進行了定量分析,最后搭建實驗平臺進行了驗證。具體結論如下:
1)動/靜負載同時工作時系統傳輸效率比單一靜態、單一動態負載工作時平均高出8.9%和15%,但靜態負載平均接收功率下降較大,表明動靜協同耦合系統適用于為電動汽車與信號燈等功率差異較大的動靜負載傳輸能量。
2)動態側接收功率與靜態側耦合系數、品質因數成負相關;靜態側接收功率與動態側耦合系數、品質因數成負相關。
3)靜態耦合的存在會使動態側臨界耦合點發生偏移;動態耦合的存在會使靜態臨界耦合點時刻變化。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
