鋰離子動力電池荷電狀態監測仿真
2022-09-28 09:50:54程清偉姜立標
計算機仿真 2022年8期
程清偉,姜立標
(1. 廣州城市理工學院汽車與交通工程學院,廣東 廣州 510800;2. 華南理工大學機械與汽車工程學院,廣東 廣州 510641)
1 引言
目前,為降低二氧化碳對環境產生的污染,新能源汽車得以迅速發展。動力電池為新能源汽車發展的關鍵。鋰離子動力電池與普通汽車電池相比,具有壽命長、能量高的優勢,被廣泛的應用在新能源汽車中。電池的剩余容量可通過荷電狀態描述,因此在電池管理系統中估計荷電狀態是目前急需深入研究的重點問題。
許元武等人根據荷電狀態的定義構建AH,并在AH中引入參數模型,在Takagi-Sugeno模糊模型原理的基礎上結合EKF聯合估計器監測電池的荷電狀態。但是該方法忽略了構建電池模型,在荷電狀態監測過程中的數據依據較少,在不同電池工況下的監測結果誤差大,存在適用性差的問題。談發明等人引入虛擬觀測噪聲補償觀測模型誤差,在逆Wishart分布的基礎上計算虛擬觀測噪聲對應的協方差,并在迭代過程中計算電池系統狀態和噪聲協方差相應的后驗概率,根據計算結果更新狀態,利用更新后的卡爾曼濾波完成電池荷電狀態的監測,該方法獲得的檢測結果平均絕對誤差大,降低了方法的整體有效性。張建文根據電池運行特點,對電池容量進行校正處理,利用溫度、充放電倍率和老化程度等校正系數監測電池的荷電狀態,該方法雖然可以實現電池荷電狀態的監測,但運行時間過長,存在監測效率低的問題。
為了解決目前方法中存在的問題,提出鋰離子動力電池荷電狀態監測方法。
2 鋰離子動力電池模型構建
鋰離子動力電池內部存在復雜的化學反應,鋰離子動力電池工作的外特性僅通過一組RC難以確定,為了提高準確性,需要多組并聯的RC,但系統模型參數在復雜的運算中難以確定,因此所提方法選用2階RC等效電路模型分析鋰離子動力電池工作的外特性。
設置電容、、處的電壓分別為1、2、,鋰離子動力電池在放電過程中的電壓為=+1+2+,其中代表電池初始電阻,代表流過電池的電流。鋰離子動力電池在充電過程中的電壓為=-1-2-。
當鋰離子動力電池處于靜止狀態時,兩個電容同時在電池中放電,經過一定時間后=。
通過上述分析獲得鋰離子動力電池電路模型中參數之間存在的關系
()=()-()-1()-2()
(1)
令=1、=2、=、=、=,將其代入上述公式中,構建狀態空間(,)
(2)
式中的參數、、、可通過下述公式計算得到
(3)
所有測量參數在實際鋰離子動力電池系統中都屬于離散數據,因此需要離散化處理狀態空間模型,令=+Δ、=Δ、=、=,考慮噪聲對鋰離子動力電池荷電狀態監測產生的影響,引入觀測噪聲和過程激勵噪聲,設置1為系統的采樣周期Δ,通過下述公式描述離散狀態下電池的荷電狀態空間

(4)
電池電量充滿和電池電量很低的區段可充分體現鋰離子動力電池荷電狀態與電壓之間存在的非線性關系。因此可以分段線性化處理鋰離子動力電池的非線性關系,獲得如下關系模型
(5)
式中,、、、、、均代表相關系數,用來衡量線性關系;代表鋰離子動力電池荷電狀態。
鋰離子動力電池在結束充電以及開始充電時的區段通常較短,因此第二區段是其正常工作的區段,設置參數和,此時鋰離子動力電池處于充電狀態時的電壓為()=++()+1()+2(),鋰離子動力電池處于放電狀態時的電壓為()=+-()-1()-2()。
鋰離子動力電池荷電狀態監測方法通過電池充放電靜置實驗方法確定狀態參數、,具體過程如下:
1)將鋰離子動力電池在相同環境中進行電流的恒定放電,每放電5分鐘記錄鋰離子動力電池的電壓值,當電池電量完成放電后,獲得相關數據。
2)按照恒定的電流在相同環境下對鋰離子動力電池進行充電,每充電5分鐘記錄電池當前的電壓值,直到電池完成充電。
3)在相同容量環境下將上述記錄的數據繪制成曲線圖。
4)在MATLAB平臺中采用cftool對均值曲線數據進行擬合處理,此時()=+,根據上述公式獲得參數、的值。
5)根據電流、電壓曲線獲取的相關信息估算鋰離子動力電池的電阻參數和電容參數。
6)對電路零輸入響應進行考慮,在電路放電段電壓方程的基礎上將鋰離子動力電池電路方程轉變為下式
=-()-()(1--)-()(1--)
(6)
式中,、代表電池電流常量。
由于電容在電池工作狀態下會產生容抗作用,因此電路在電壓出現跳變后會出現零輸入響應,可用指數擬合函數=+-+-描述鋰離子電動電池的電路,其中參數、、、、可通過cftool工具在MATLAB平臺中計算得到。
3 荷電狀態監測
鋰離子動力電池荷電狀態監測方法采用卡爾曼濾波算法監測電池的荷電狀態。
傳統卡爾曼濾波算法中狀態變量對應的后驗估計值和先驗估計值是不斷變化的。卡爾曼濾波在實際應用過程中受運算速度的影響,導致迭代精度下降。通過離散化處理可以提高運算效率,通過下述公式離散化處理觀測方程和狀態方程
(7)
式中,代表鋰離子動力電池系統的狀態變量;代表傳遞矩陣;為鋰離子動力電池系統的輸入;為鋰離子動力電池系統輸入誤差引起的過程噪聲;代表電池系統對應的前饋矩陣;代表鋰離子動力電池系統的輸出值;代表觀測矩陣;代表測量噪聲。

下述過程中上標“+”和“-”分別代表最優估算和預測估算


(8)
式中,代表初始狀態變量,[]為其對應的方差。


(9)


(10)
4)用卡爾曼濾波增益矩陣表示測量結果的修正系數,該系數可利用預測值對應的偏離程度計算得到

(11)
其中,上角標為轉置矩陣。


(12)


(13)
7)根據上述過程,進行迭代,完成預測。
根據上述卡爾曼濾波過程對鋰離子動力電池荷電狀態進行監測。
狀態變量和根據基爾霍夫定律獲得的如下微分方程
(14)
其中,代表鋰離子動力電池的電流;為電池對應的電壓;為電池對應的電容;為鋰離子動力電池對應的電阻。
鋰離子動力電池荷電狀態監測方法采用安時積分法在2階等效電路模型的基礎上構建鋰離子動力電池系統對應的離散狀態方程
(15)
式中,代表鋰離子動力電池的電壓估計值。
在上式的基礎上獲得鋰離子動力電池的輸出方程
=--1,
(16)
式中,代表鋰離子動力電池對應的初始電阻;代表時刻對應的電流;1,代表電容和電阻構成的并聯電路在時刻對應的電壓估計值。
通過上述過程獲得鋰離子動力電池系統的荷電測量矩陣、狀態轉移矩陣|-1和荷電狀態向量完成鋰離子動力電池荷電狀態的監測
(17)
(18)
(19)
4 實驗與分析
為驗證鋰離子動力電池荷電狀態監測方法的整體有效性,需要對其進行相關測試。
在周期性脈沖工況、恒流放電工況以及恒流充電工況下采用鋰離子動力電池荷電狀態監測方法、文獻[3]提出的基于變參數模型的鋰電池荷電狀態觀測方法和文獻[4]提出的觀測模型誤差不確定的鋰電池狀態監測方法,測試充放能量指標,結果如圖1。
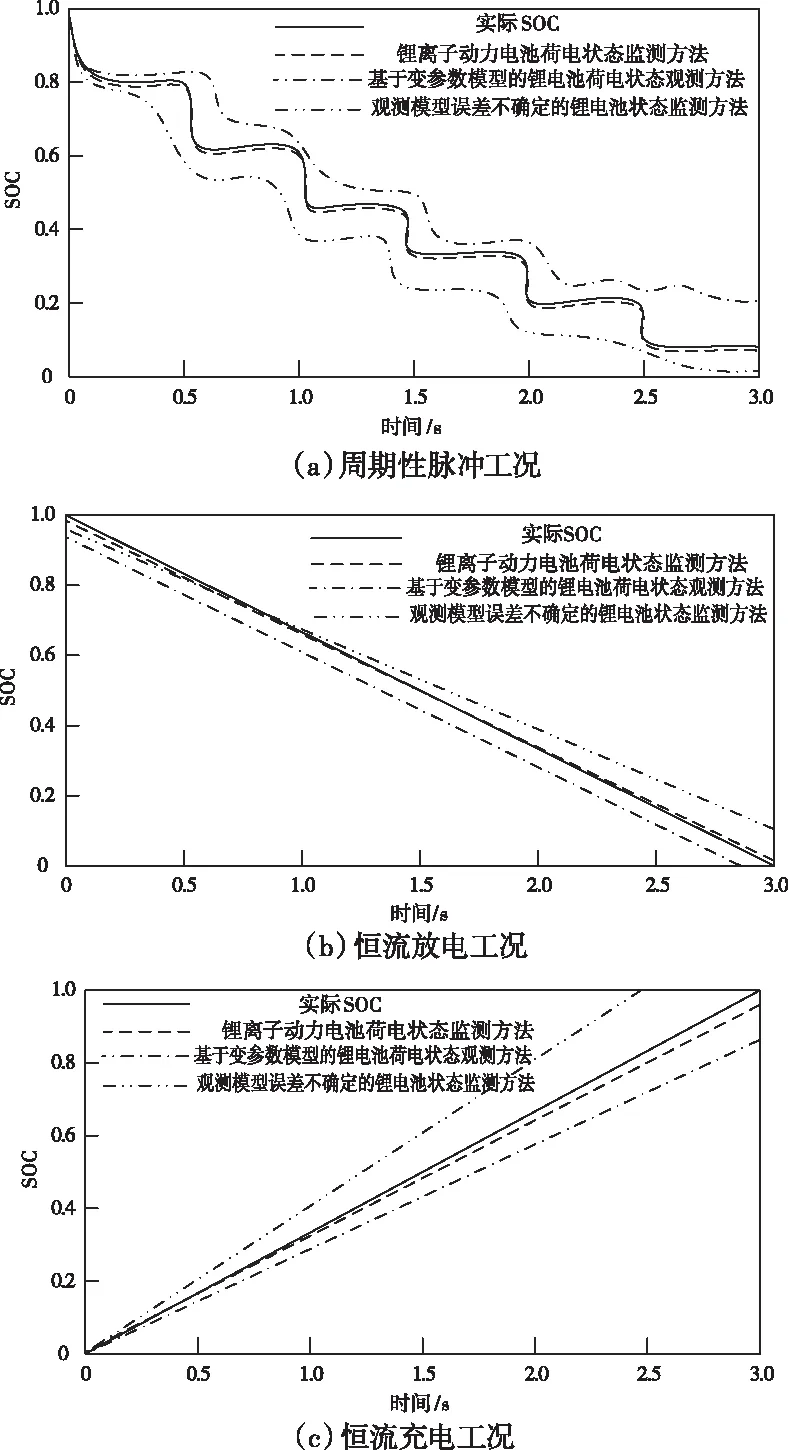
圖1 不同工況下的SOC監測結果
分析圖1可知,在周期性脈沖工況、恒流放電工況以及恒流充電工況下采用鋰離子動力電池荷電狀態監測方法獲得的電池荷電狀態監測結果與實際荷電狀態基本相符,采用基于變參數模型的鋰電池荷電狀態觀測方法和觀測模型誤差不確定的鋰電池狀態監測方法獲得的電池荷電狀態監測結果與實際荷電狀態之間的偏差較大,通過對比可知,鋰離子動力電池荷電狀態監測方法可在不同工況下可準確的完成鋰離子動力電池荷電狀態的監測,因為該方法在監測之前構建了鋰離子動力電池模型,根據鋰離子動力電池模型分析電池在充電和放電狀態下的荷電特性,可在不同工況下完成電池荷電狀態的監測,提高了方法的適用性。
將平均絕對誤差作為測試指標,進一步測試上述三種方法的監測誤差,結果如圖2所示。
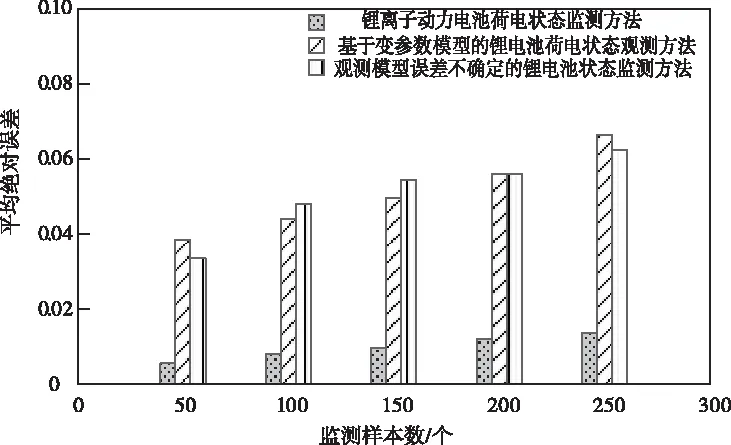
圖2 不同方法的平均絕對誤差
根據圖2中的數據可知,采用不同方法對電池荷電狀態進行監測時,隨著監測樣本不斷增加,鋰離子動力電池荷電狀態監測方法、基于變參數模型的鋰電池荷電狀態觀測方法和觀測模型誤差不確定的鋰電池狀態監測方法的平均絕對誤差也不斷增加,但研究提出的鋰離子動力電池荷電狀態監測方法監測結果的平均絕對誤差始終保持在002以內,基于變參數模型的鋰電池荷電狀態觀測方法和觀測模型誤差不確定的鋰電池狀態監測方法監測結果的平均絕對誤差相比之下較高,驗證了鋰離子動力電池荷電狀態監測方法的監測有效性。
分別采用鋰離子動力電池荷電狀態監測方法、基于變參數模型的鋰電池荷電狀態觀測方法和觀測模型誤差不確定的鋰電池狀態監測方法進行電池荷電狀態進行監測,對比不同方法的運行時間,測試結果如表1所示。
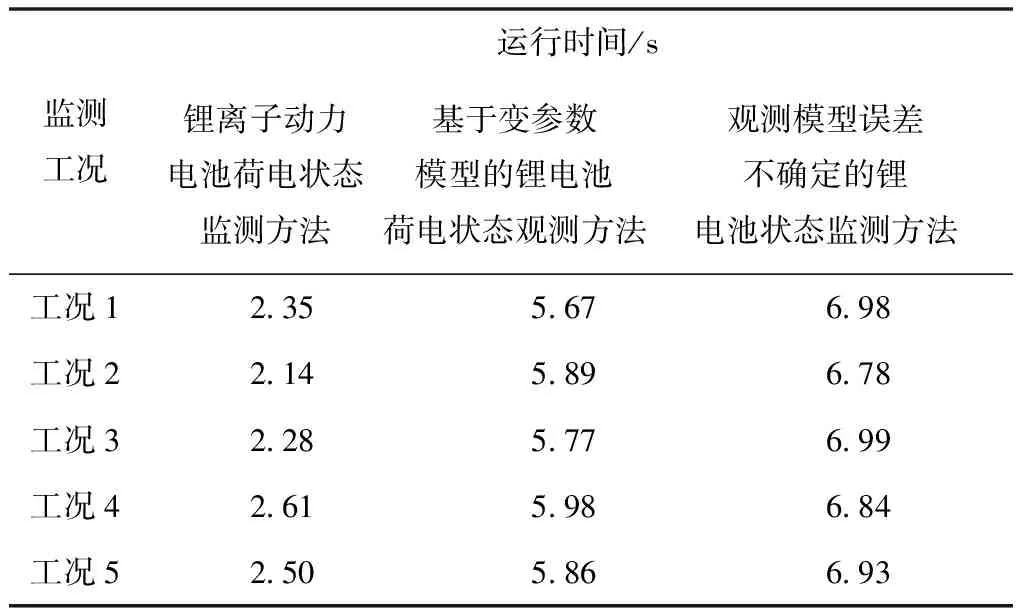
表1 不同方法的運行時間
分析表1中的數據可知,在不同工況下,采用鋰離子動力電池荷電狀態監測方法對電池的荷電狀態監測時,監測時間均保持在3s內,基于變參數模型的鋰電池荷電狀態觀測方法的運行時間在5s附近波動,觀測模型誤差不確定的鋰電池狀態監測方法的運行時間接近7s,通過上述分析可知,在電池荷電狀態監測測試中,研究方法的運行時間最短。
5 結束語
目前電池荷電狀態監測方法存在適用性差、平均絕對誤差大和運行時間長的問題,提出鋰離子動力電池荷電狀態監測方法,采用卡爾曼濾波算法在電池模型的基礎上實現荷電狀態的監測,解決了目前方法中存在的問題,為新能源電動汽車的供電提供了保障。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
