城鄉土地分類規劃目標函數設計與仿真
2022-09-28 09:50:46康彩紅莊敬宜
計算機仿真 2022年8期
康彩紅,方 飛,莊敬宜
(1. 吉林建筑科技學院建筑與規劃學院,吉林 長春 130114;2. 吉林建筑大學建筑與規劃學院,吉林 長春 130119)
1 引言
人類活動是導致土地利用變化的重要驅動因素,氣候、水文和土壤等自然因素會受到土地利用的影響,同時會導致能量和物質在生態系統中的流動和循環發生變化,改變區域的生物多樣性。城鄉土地的利用現狀在城市化進程和社會經濟不斷發展的過程中發生了較大的變化,引起了國內外學者的廣泛關注,因此對城鄉土地分類規劃的研究可有效提高城鄉土地的利用率。
劉舒等人通過隨機森林算法獲取土地圖像的特征,在Boruta特征選擇算法的基礎上建立土地特征集,結合多種分類算法完成土地的分類。但是,該方法沒有對獲取的土地圖像進行增強處理,導致分類結果的用戶精度和總體精度低,降低了方法的分類效果。何云等人首先獲取了土地圖像的紋理特征,采用袋外誤差方法進一步篩選選取的紋理特征,通過隨機森林算法根據獲取的特征實現土地分類。但是,該方法獲取的圖像清晰度較低,導致分類結果不理想。宋明輝對土地圖像進行分割處理,構建分類規則,采用支持向量機根據分類規則完成土地分類規劃。但是,該方法規劃后的土地緊湊度較低,方法的有效性較差。
為解決上述方法中存在的問題,提出基于無人機遙感影像的城鄉土地分類規劃方法。該方法首先對圖像增強處理,通過支持向量機完成土地分類,構建目標函數,實現土地規劃。該方法通過圖像增強處理,提高了圖像清晰度,可獲取遙感影像的細節信息,進而提高了方法的分類效果和規劃效果。
2 遙感影像增強
基于無人機遙感影像的城鄉土地分類規劃方法通過混沌蛙跳算法對無人機遙感影像完成增強處理。
1)混沌蛙跳算法模型的構建


(1)

混沌變量指的是變量具有混沌狀態,基于無人機遙感影像的城鄉土地分類規劃方法利用Logistic方程獲取混沌序列+1=(1-),其中代表在區間[0,4]內取值的控制參數。
根據混沌序列獲得個初始值,,…,0,其中代表算法中存在的青蛙數量,在方程中代入初始值,獲得混沌變量{,=1,2,…,},通過下式對混沌變量進行映射處理
(2)
通過上述映射處理獲得個二進制向量,其長度為。
在尋優時將混沌擾動施加到停止尋優的青蛙上,獲得全局最優解,避免局部極值的出現。對青蛙()施加若干次擾動,此時青蛙的位置為′()=(),其中代表擾動系數,其主要目的是提高青蛙的搜索效果,使混沌擾動更加均勻;代表隨機數,在區間(0,1)內取值。
通過控制幅度避免青蛙大幅度擾動,青蛙在算法中的擾動幅度為∈[-log(+1),log(+1)]。
2)影像增強
針對無人機遙感影像的增強處理,基于無人機遙感影像的城鄉土地分類規劃方法通過函數(,)完成:

(3)
圖像的增強效果受參數(,)的影響,當小于時,需要增強影像中較暗的區域,當、的值相等時,需要增強影像的中間區域;當大于時,需要增強影像較亮的區域。

(4)

通過下式反變換遙感影像的像素,獲得影像

(5)
設置收斂條件,當青蛙尋優結果符合下述條件時,停止尋優:

(6)
3 城鄉土地分類規劃
3.1 城鄉土地分類
基于無人機遙感影像的城鄉土地分類規劃方法從光譜和形狀兩個方面獲取土地遙感影像的特征。
1)光譜特征
選取的土地遙感影像光譜特征包括植被指數、均值、植被指數、標準差、最大差值和亮度。
植被指數=(-)(+),其中代表綠色波動均值;代表紅色波段均值。
植被指數可通過下式計算得到
(7)
式中,代表藍色波段均值。
標準差的計算公式如下
(8)
最大差值=(max-min),其中max、min分別代表最大圖層值和最小圖層值;代表遙感影像的亮度。
2)形狀特征
基于無人機遙感影像的城鄉土地分類規劃方法選取密度、形狀指數和長寬比作為遙感影像的形狀特征。
密度的計算公式如下
(9)
式中,()、()代表像元坐標的方差。
將上述獲取的無人機遙感影像特征輸入支持向量機中,實現城鄉土地的分類。
支持向量機可在高維的核空間中映射上述獲取的無人機遙感影像特征,提高城鄉土地分類的精度。
用{(,),(,),…,(,)}表示支持向量機的訓練樣本,其中∈代表支持向量機的輸入,∈{±1}代表支持向量機的輸出。設置約束條件(+)≥1-,建立最優決策面+=0,其中表示松弛變量,求解問題可通過Lagrange乘子算法轉變為下述約束優化問題

(10)
式中,、代表Lagrange乘子;(,)為符合Mercer定理的核函數。
3.2 城鄉土地規劃
321 約束條件
1)數量結構約束
②)宜農土地面積約束,根據養分在土壤中的含量,判斷研究區域的宜農性:
(∩∩∩)∪∪≥
(11)
式中,、、、分別描述的是三級肥力以上土壤有機質、土壤全氮、土壤速效磷、土壤速效鉀的面積;代表旱地在研究區域中的面積;代表水田在研究區域中的面積;代表基本農田在研究區域中的面積。
2)空間布局約束
②土地利用空間轉換約束:通過該約束保證水域、農田等區域范圍中不發生土地利用類型的轉換,()=0,[(,)∈Ω],其中Ω描述的是空間管制區域;()描述的是轉換概率。
322 城鄉土地規劃目標函數
1)糧食生產目標函數
糧食生產的優化目標函數表達式如下
(12)
式中,描述的是不同土地類型的面積;代表不同用地類型的糧食單產系數;代表糧食在區域土地中的總產量。
2)生態安全目標函數
生態安全目標函數可分為以下兩個子目標函數,該目標函數的主要目的是保障生態安全。
①構建土地生態承載力模型
(13)

②土地生態相容性最小化目標函數如下

(14)
式中,,′代表土地生態相容性程度;,′′代表土地利用單元之間存在的相容關系;代表不同類型區域的生態相容性總和。
3)社會經濟發展目標函數
①在經濟發展過程中經濟總產出屬于重要因素
(15)
式中,代表經濟產出系數;描述的是經濟總產出。
②土地類型進行轉換時產生的總費用可通過轉換總成本進行反映
(16)
式中,代表二值變量;代表土地轉換成本;代表土地之間進行轉換的總成本。
通過上述目標函數完成城鄉土地的規劃。
4 實驗與分析
為了驗證基于無人機遙感影像的城鄉土地分類規劃方法的整體有效性,需要對基于無人機遙感影像的城鄉土地分類規劃方法進行測試。
分別采用基于無人機遙感影像的城鄉土地分類規劃方法、文獻[3]方法和文獻[4]方法進行如下測試:
1)用戶精度
用戶精度是指從分類結果中任取一個隨機樣本,其所具有的類型與地面實際類型相同的條件概率。用戶精度描述的是在類別像元總數中用戶正確像元數所占的比例,其計算公式如下

(17)
式中,′代表用戶正確像元素;代表分類像元素;代表采樣樣本數量。和分別表示混淆矩陣的橫向和縱向的元素。
采用所提方法、文獻[3]方法和文獻[4]方法對城鄉土地進行分類,對比不同方法的用戶精度,測試結果如圖1所示。
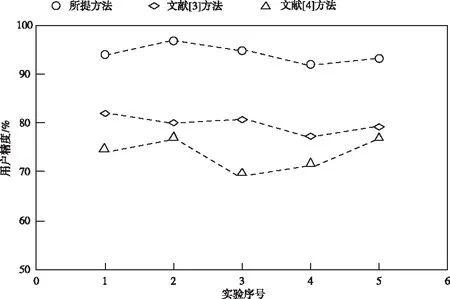
圖1 用戶精度測試結果
根據圖1可知,在不同的城鄉土地分類實驗中,所提方法的用戶精度均在90以上,文獻[3]方法和文獻[4]方法的用戶精度遠小于所提方法的用戶精度,用戶精度越高,表明方法的城鄉土地分類效果越好,通過上述對比測試,驗證了所提方法具有良好的分類性能。這是因為該方法對城鄉土地進行劃分之前,采用混沌蛙跳算法對獲取的遙感影像進行了增強處理,提高了無人機遙感影像的清晰度,可獲取遙感影響中存在的細節信息,有助于圖像特征的提取,提高了城鄉土地分類的精度。
2)總體精度
城鄉土地分類的正確程度可通過總體精度這一指標反映,其計算公式如下
(18)
式中,″代表土地正確分類數。
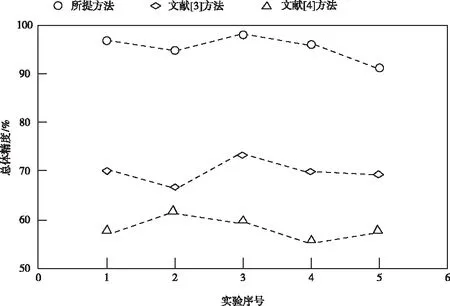
圖2 總體精度測試結果
圖2為不同方法的總體精度測試結果,根據圖2中的數據可知,采用上述方法對城鄉土地進行分類時,文獻[3]方法的總體精度在60上下波動,文獻[4]方法的總體精度約在70左右,而所提方法的總體精度最高,在三次實驗中接近100,通過上述分析可知,所提方法的總體精度最高,表明所提方法對城鄉土地分類的正確程度較高。
3)緊湊度
將緊湊度作為指標,對所提方法、文獻[3]方法和文獻[4]方法的城鄉土地規劃結果進行評價。緊湊度越高,表明方法的土地規劃效果越好,相反,緊湊度越低,表明方法的土地規劃效果越差,不同方法的城鄉土地規劃結果如表1所示。
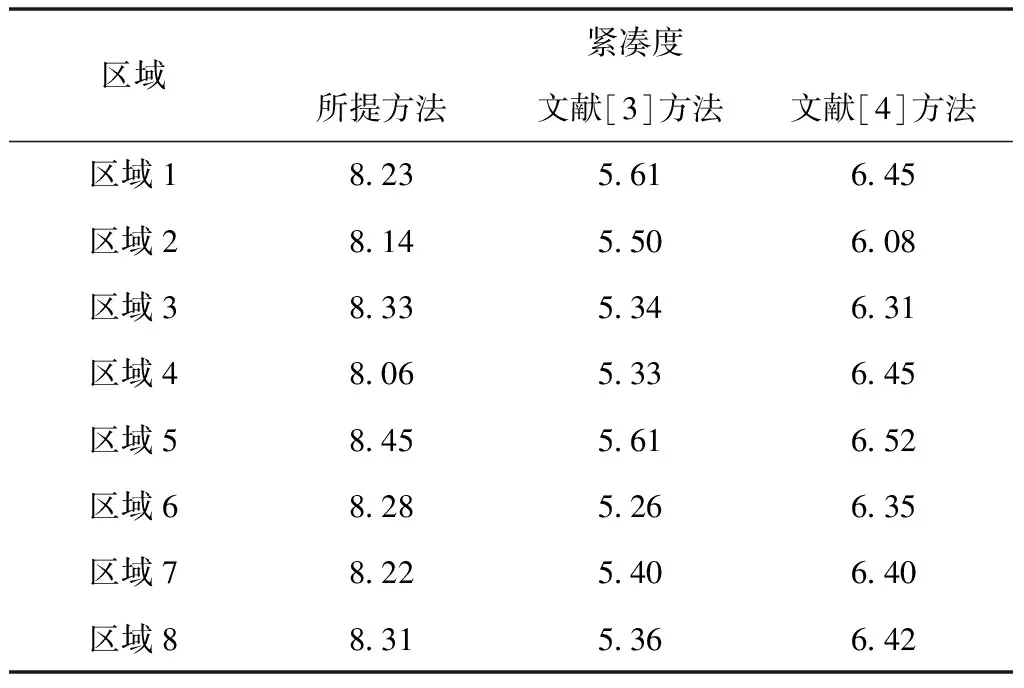
表1 城鄉土地規劃結果
對表1中的數據進行分析可知,對多個區域進行土地規劃時,所提方法獲得的緊湊度均高于文獻[3]方法和文獻[4]方法的緊湊度,表明所提方法的土地規劃效果好。
5 結束語
提出基于無人機遙感影像的城鄉土地分類規劃方法,首先對無人機遙感影像進行增強處理,提取影像特征,根據特征對其進行分類,構建規劃目標函數,完成城鄉土地的規劃。在分類實驗中,該方法的用戶精度和總體精度較高,表明方法的分類效果好,在規劃實驗中,該方法獲得了較高的緊湊度,驗證了所提方法的規劃性能。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
領導決策信息(2018年50期)2018-02-22 06:17:16
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
