架空線路走廊樹枝切割機器人研究
2022-09-20 05:04:22黃良玉吳功平吳俊峰
機床與液壓 2022年9期
黃良玉,吳功平,吳俊峰
(武漢大學動力與機械學院,湖北武漢 430072)
0 前言
架空線路外部安全隱患的調查統計數據表明:由樹枝造成的安全隱患占了總隱患數的一半左右,樹枝過度生長已經成為威脅線路安全運行的主要因素之一。目前采取的自動化手段是車輛輔助修剪和直升機搭載修剪設備修剪。前者對作業環境要求較高,只能在相對平坦的地面進行作業且高處樹枝無法順利修剪;后者修剪成本高,且只能修剪線路兩側的樹枝,無法修剪線路下方的樹枝。因此,研究具有實用性的架空線路樹枝作業機器人已成為迫切需求。
加拿大科學家Michel PAQUETTE設計的懸掛式自動喬木修剪機以車輛為基體通過搭載作業設備的方式完成對樹枝的修剪,該設備由于車輛的限制無法進入山區執行修剪任務。日本科學家UEKI等研制出沿樹干攀爬的輕質攀爬式剪枝機器人,該機器人由滾動爬升機構、鏈鋸執行機構和控制器三部分組成,滾動爬升機構為機器人提供向上行駛的動力,同時鏈鋸周向旋轉切割樹枝。這種構型的機器人只能沿筆直樹干作業,多用于景觀樹木的修剪。國內外對沿線路行走的樹枝修剪機器人研究較少,福建泉州的智勇達公司設計了一款架空輸電線路自動修剪樹枝機器人,該機器人由移動機體、V形絕緣臂與和修剪系統三部分組成,移動機體沿線路行走時,修剪系統的兩對刀片做高速旋轉運動完成對樹枝的修剪,但刀片修剪效率較低且無法調整修剪系統與樹枝的距離。武漢大學機器人研究所研制的樹枝修剪機器人由移動機器人與超長絕緣臂和修剪組成,該機器人修剪效率較高,但由于擺臂角度有限而無法完全覆蓋所需修剪范圍,同時作業末端也無法調整修剪姿態。
針對上述問題,作者設計一款沿架空高壓線路行走的樹枝切割機器人,通過分析風對線路的影響得到了線路走廊的理論修剪區域,提出了樹枝切割機器人原理構型;以110 kV高壓線路為例,在SolidWorks中設計了機器人的虛擬樣機,并針對兩種工況進行作業規劃;利用D-H參數法建立機器人運動學模型,通過坐標變換求解機器人運動學正解,并依據蒙特卡羅法得到機器人理論作業空間,通過與理論修剪區域對比驗證了該構型設計的合理性;研制的實驗樣機在自建線路上進行了模擬作業試驗,試驗結果表明它能有效完成修剪樹枝的任務,實用性強。
1 樹枝切割機器人原理構型
架空輸電線路走廊樹枝的修剪作業主要針對導線周圍的樹枝。影響導線與線路走廊兩側樹枝間距離的主要影響因素是風,一般情況下有微風振動以及風偏兩種形式。微風振動振幅一般在架空線直徑的3倍以下;風偏是指架空線受橫向風力的作用,偏離其垂直位置的現象。
以導線軸線上任意一點為坐標原點,豎直向上為軸正方向,水平向右為軸方向建立坐標系。圖1為在風偏及微風振動的影響下可能偏移到的極限位置截面,為導線在無風狀態下任意一點的位置,為點處導線的自然弧垂,、表示風偏作用下導線左偏與右偏所能達到的極限位置,、表示微風振動作用下導線所能達到的極限位置,、分別表示導線的直徑以及風偏角。
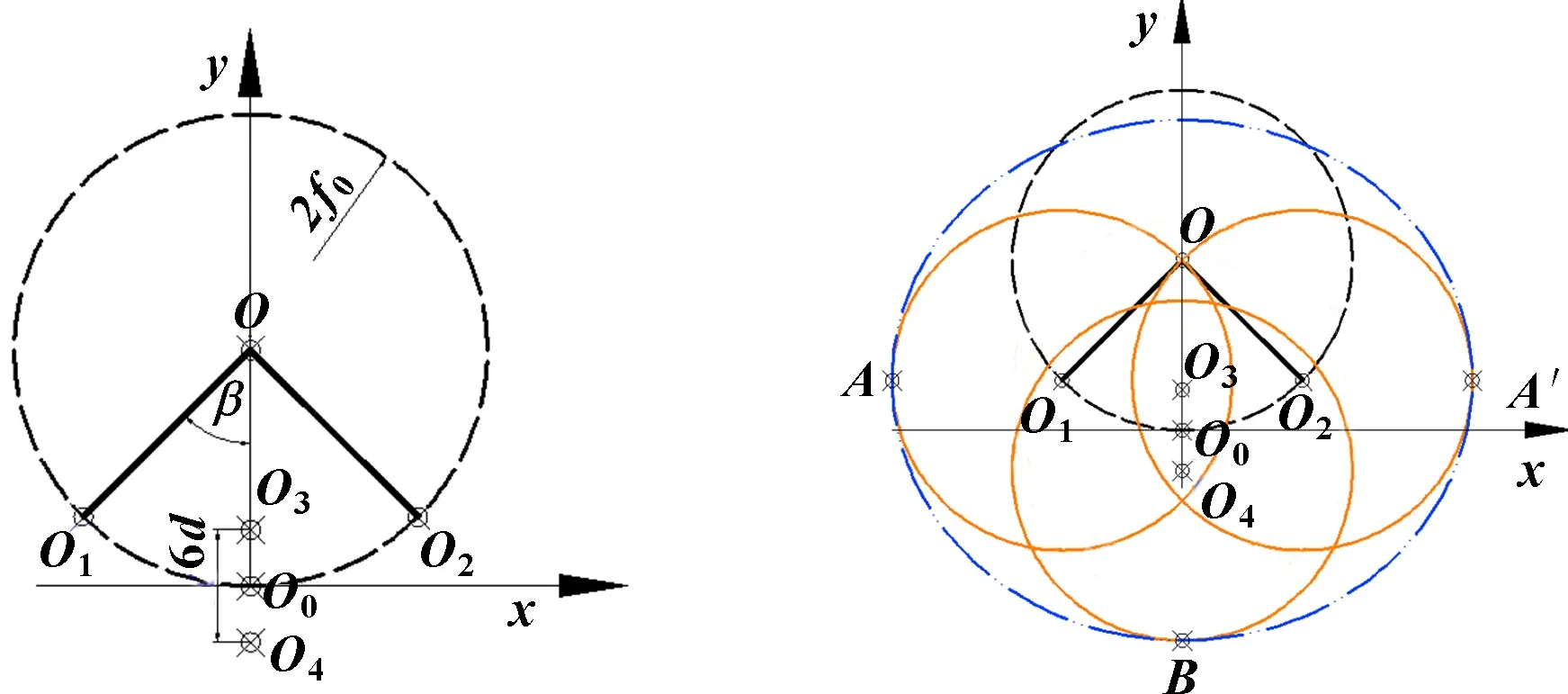
圖1 導線偏移的極限位置 圖2 理論修剪區域
分別以、、、以及五個點為圓心,架空線路的電氣安全距離為半徑作圓,則這5個圓所包絡區域即為所需修剪區域,以橢圓來擬合該包絡區域,分別以圓和圓的左端點和右端點′為橢圓長軸的兩端點,以圓的下端點為橢圓的短半軸端點,得到的理論修剪區域如圖2所示。由于實際線路周圍的樹枝一般分布在導線下方以及兩側,利用平面幾何知識可以推導出導線上某一點理論修剪區域為

(≤0)
(1)
線路通道里的樹枝生長情況較為復雜,樹枝粗細不一、姿態各異。基于上述理論修剪區域提出了沿線路行走的樹枝切割機器人原理構型,如圖3所示。該機器人包括5個部分,共有8個關節,分別為:行走機構,由2個行走關節構成,為機器人行走以及爬坡提供動力;水平回轉機構和鉛垂俯仰機構,分別調節作業端在水平面與鉛垂面的位姿;末端回轉機構,調整末端作業裝置的位姿,特別是夾爪的姿態以便于進刀;末端切割裝置,包括鋸片自轉、曲柄回轉以及夾爪夾緊松開3個自由度。該套作業裝置既能實現對細樹枝的掃切又能實現對粗樹枝的夾持切割,可以有效地對線路通道內的樹枝實現全面修剪。
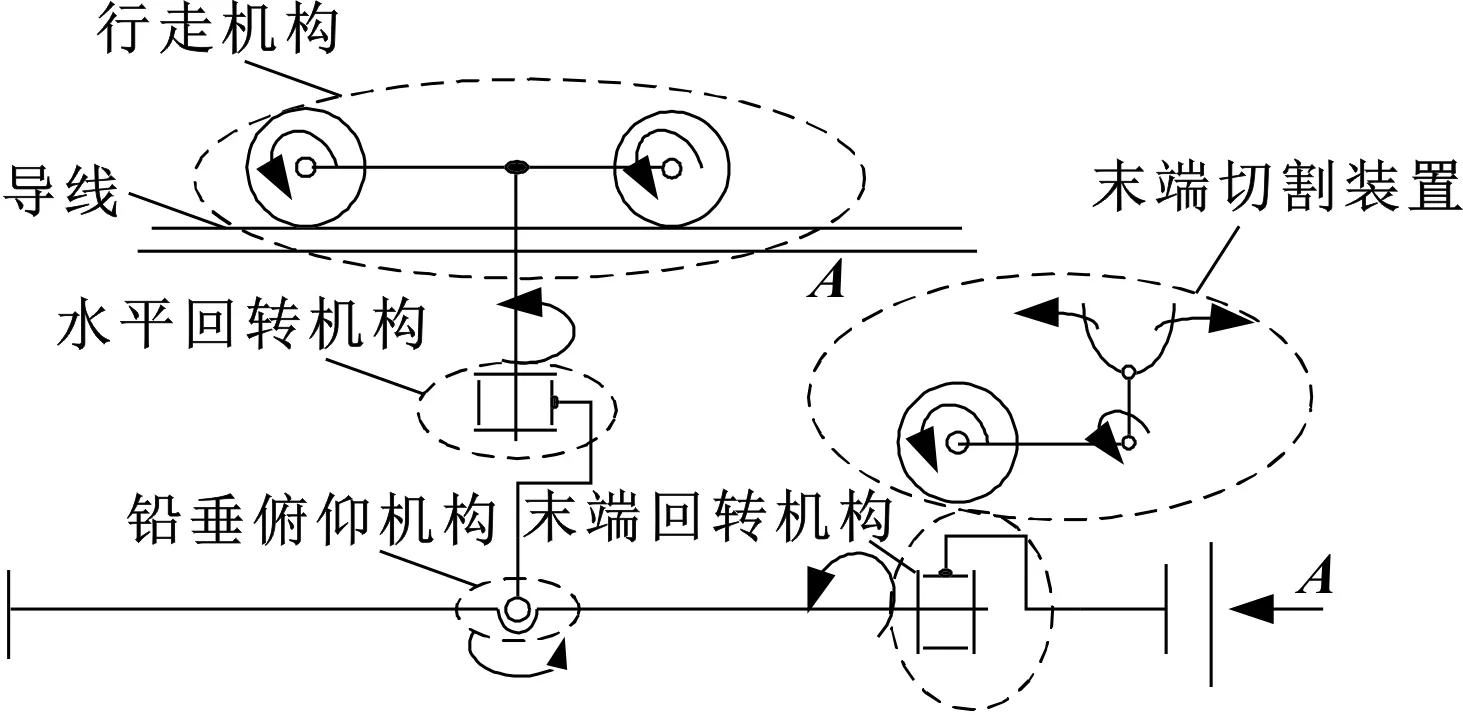
圖3 樹枝切割機器人原理構型
2 機器人虛擬樣機及作業規劃
2.1 機器人虛擬樣機
在考慮樹木自然生長速度的情況下110 kV線路導線與樹木之間的最小電氣安全距離為4 m。根據上述樹枝切割機器人原理構型設計了機器人的虛擬樣機模型,如圖4所示。機器人行走機構雙輪同側懸掛于導線上,包括行走輪、主橫臂、L形支架三部分,行走輪采用空心輪轂結構,L形支架連接在主橫臂中央,其底部開有槽通孔,可通過調整水平回轉機構的連接位置來調節整個機器人的重心位置。由于機器人運動時負載大,因此水平回轉機構、鉛垂俯仰機構以及末端回轉機構均設計成蝸輪蝸桿傳動來增大輸出轉矩,集成控制箱布置在作業長臂作業端的另一側,用以平衡作業端重力產生的力矩。
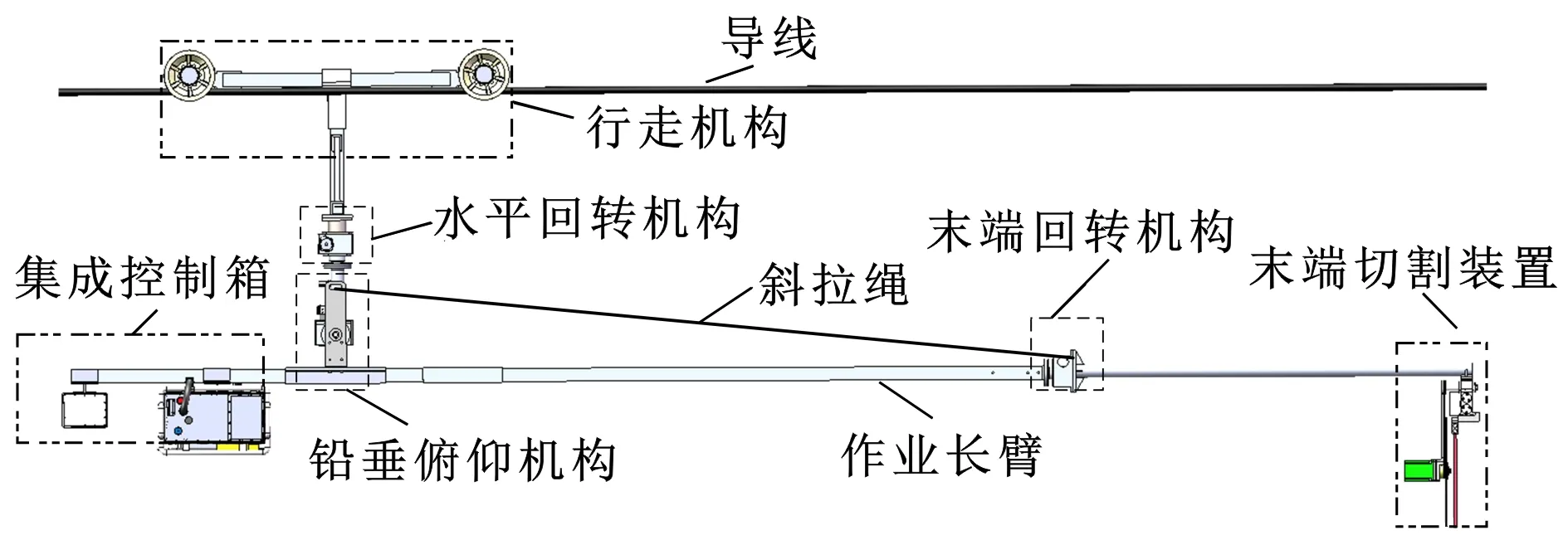
圖4 樹枝切割機器人虛擬樣機
作業長臂共長5.5 m,包括方形臂和圓形臂兩段,作業長臂為懸臂梁結構且末端負載較大,通過斜拉繩的方式來提高作業臂的剛性,有利于末端穩定作業。末端切割裝置垂直布置在作業長臂作業端的最外側,通過上端法蘭與作業長臂連接,具體結構如圖5所示,夾爪與鋸片前后平行布置,鋸片電機與曲柄連接可實現鋸片的擺動切割。該裝置箱體內設兩套傳動機構,夾爪電機通過齒輪傳動將運動傳遞給正反牙絲桿,通過絲桿螺母的配合來實現夾爪的對稱往復運動,夾爪夾持一端采用刃口形狀,夾持時可嵌入樹枝一定深度;曲柄電機同樣通過齒輪傳動來實現絲桿的轉動,絲桿與曲柄齒條形成螺旋配合,進而將運動傳遞給曲柄齒輪,最后實現曲柄的來回擺動。
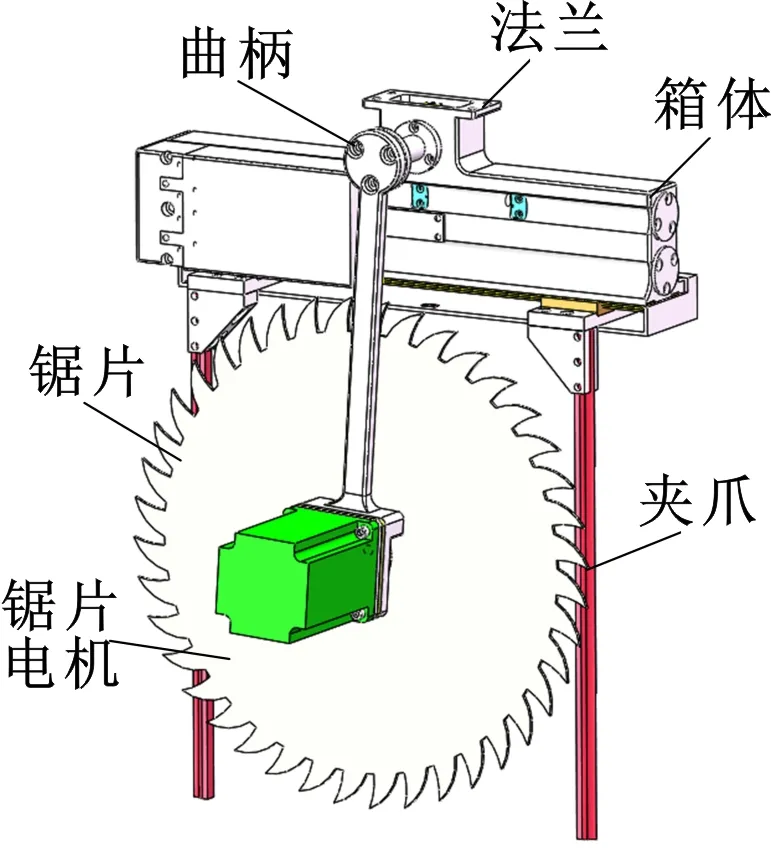
圖5 末端切割裝置結構
2.2 作業規劃
樹枝切割機器人在進行樹枝修剪作業時可將所有工況分為兩類:一類為修剪細小樹枝區域,另一類為修剪粗樹枝區域。修剪細小樹枝區域時,采用掃切的方法,機器人沿導線行走至待修剪區域位置后通過鉛垂俯仰機構調整作業末端至作業高度,之后控制水平回轉機構實現360°水平掃切。若在某一位置樹枝生長茂密,水平掃切未切割完全,此時再通過末端回轉機構帶動鋸片實現回轉掃切完成對該位置的切割。
修剪粗樹枝區域時,采用夾持切割的方法。在此建立簡化的樹木模型作為演示,作業步驟如圖6所示。首先控制機器人行走至作業位置,控制水平回轉機構與鉛垂俯仰機構粗略調整末端修剪裝置與樹枝之間的位姿,狀態如圖6(a)所示;控制夾爪打開,曲柄帶動鋸片逆時針回轉90°讓刀,控制末端回轉機構細調夾爪與樹枝位姿,狀態如圖6(b)所示;通過鉛垂俯仰機構實現夾爪進刀,左右兩夾爪夾緊樹枝,狀態如圖6(c)所示;鋸片電機開啟,曲柄帶動鋸片順時針回轉90°完成對粗樹枝的切割,狀態如圖6(d)所示。
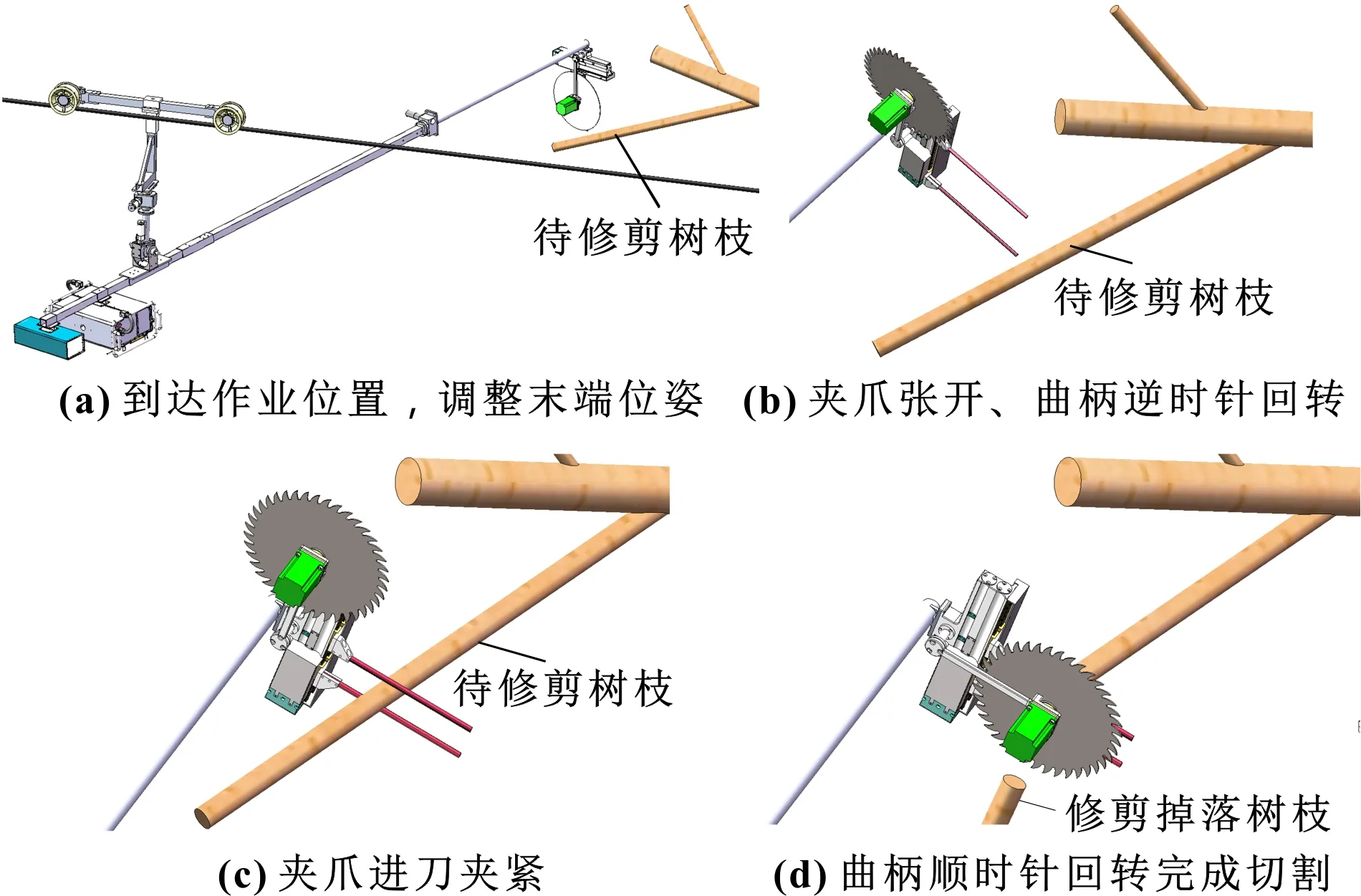
圖6 夾持切割粗樹枝步驟示意
3 機器人運動學分析
3.1 樹枝切割機器人運動學建模
為驗證所設計機器人的作業空間能否完全覆蓋前文所述的理論修剪區域,將機器人視為由關節桿件串聯的運動鏈,通過D-H參數法推導出作業末端的運動學方程,并利用蒙特卡洛法求解出末端作業空間。
影響樹枝切割機器人末端鋸片姿態的關節包括水平回轉關節、鉛垂俯仰關節和末端回轉關節,按照D-H參數法依次建立坐標系{}-{},如圖7所示。其中基座標系{}建立在移動機構橫臂中央,{}建立在水平回轉機構的幾何中心,{}建立在鉛垂俯仰機構回轉件與作業長臂連接處,{}建立在作業長臂的最外側處,{}建立在鋸片的最下端點處。各關節參數的變化范圍見表1。
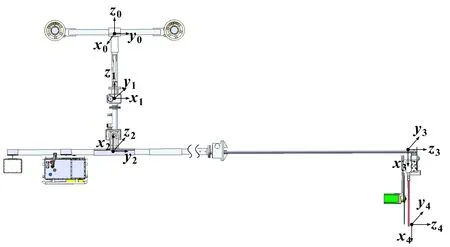
圖7 樹枝切割機器人連桿坐標系
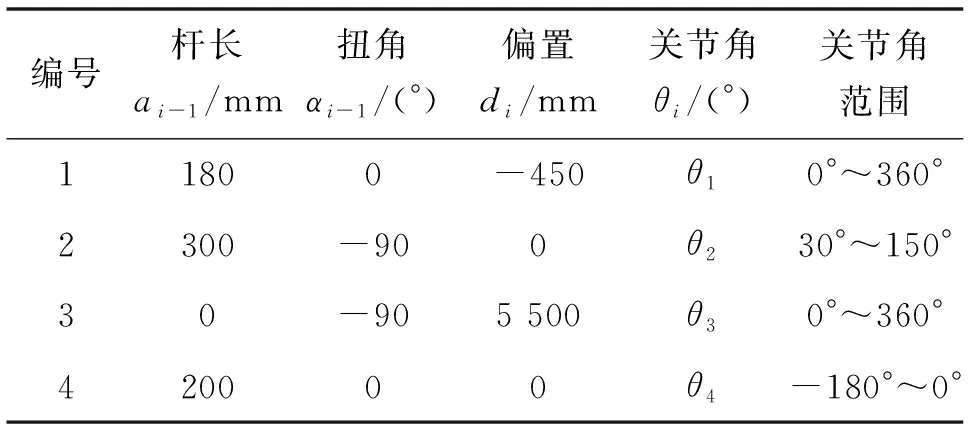
表1 機器人關節連桿參數及變化范圍
通過上述參數可求得具體的變換矩陣為
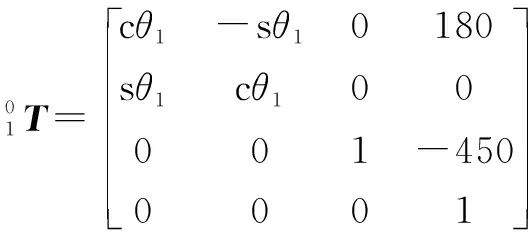
(2)
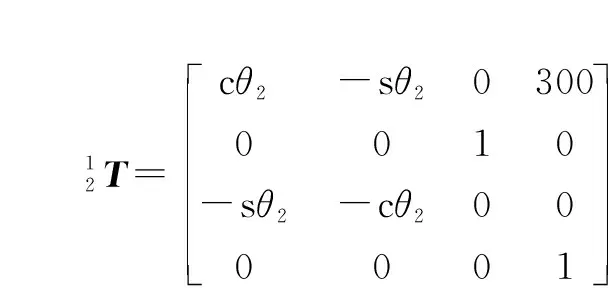
(3)
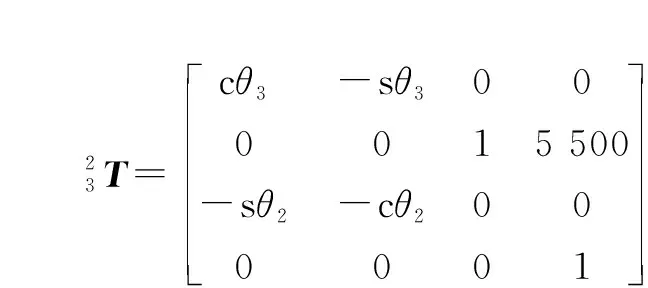
(4)
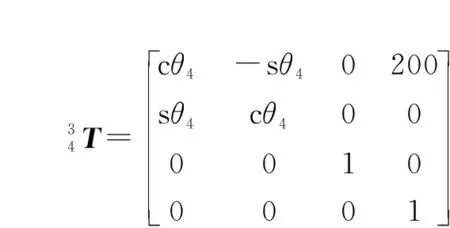
(5)
末端鋸片在基座標系{}的姿態可抽象表示為
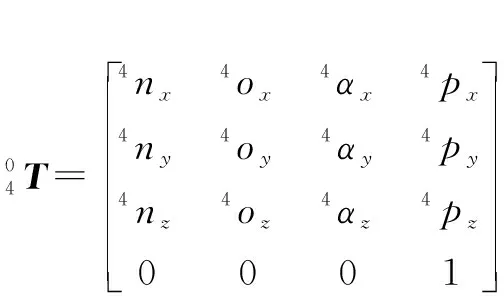
(6)
該矩陣可以表示機器人運動學正解,具體數值為上述式(2)(3)(4)(5)四個變換矩陣之積,鋸片在空間中的位置姿態是關于、、、四個變量的函數,每給定一組變量的值就會得到鋸片的一個位姿。
3.2 末端作業空間求解
為直觀地得到末端作業空間,采用蒙特卡洛法在MATLAB中求解樹枝切割機器人的工作空間,具體步驟為
(1)通過對上述4個關節變量在它們各自的變量范圍內隨機取值生成一組變量值的組合;
(2)將所取的變量值組合代入式(6)中得到鋸片在空間里的一個點坐標;
(3)將步驟(1)和(2)重復次,在此取10 000,將所有的點坐標在MATLAB中繪制作業空間的點云圖,如圖8所示。
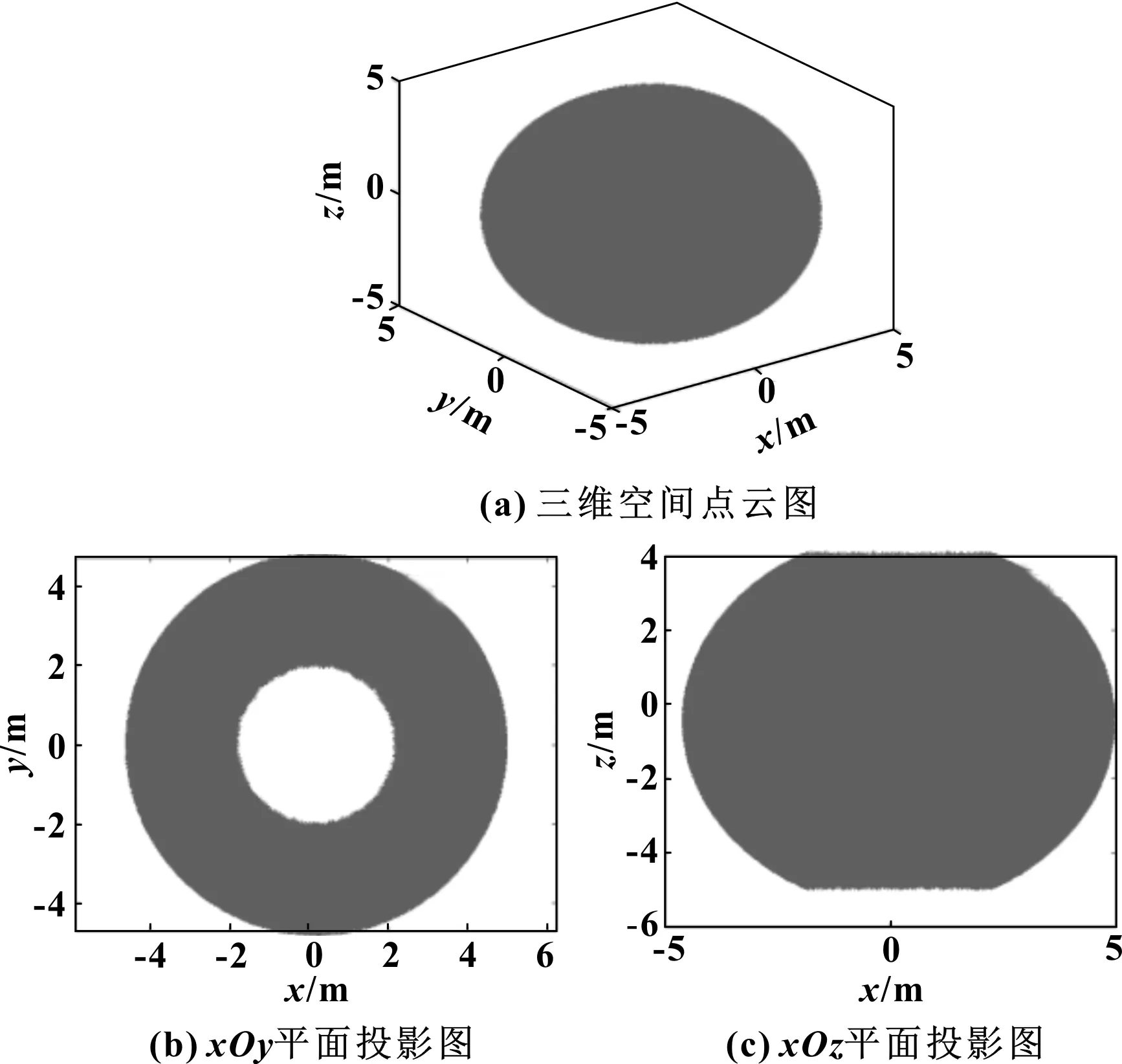
圖8 末端作業空間點云圖
由8圖可知機器人作業末端在空間內會形成一個近似橢球體的作業空間,作業空間主要通過垂直于導線軸線的平面投影圖來反映。在平面投影圖中上下對稱軸并不為直線=0,這是由于機器人作業端與基座標沿軸存在750 mm的高度差,因此該圖形上下關于=-750 mm對稱,同理該投影圖左右關于=180 mm對稱。
現以一條典型的110 kV線路來驗證作業空間能否完全覆蓋前文所述的待修剪理論模型區域。該線路的具體參數如表2所示。由于線路中央自然弧垂最大,則以線路擋段中央來進行分析計算,取風偏角為5°。通過計算可得線路中央的自然弧垂約為6.1 m,則在線路擋段中央,待修剪區域可表示為
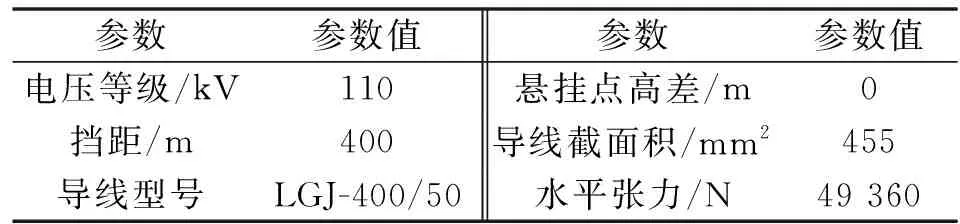
表2 110 kV典型線路參數

(7)
機器人上線后導線的附加弧垂約為1.2 m,因此機器人的實際作業空間需將之前求解的結果沿軸負方向平移1.2 m,之后再將所求的理論修剪區域與其比較,比較結果如圖9所示。很明顯,作業空間能夠完全覆蓋待修剪的半橢圓形區域,驗證了機器人結構設計的合理性。
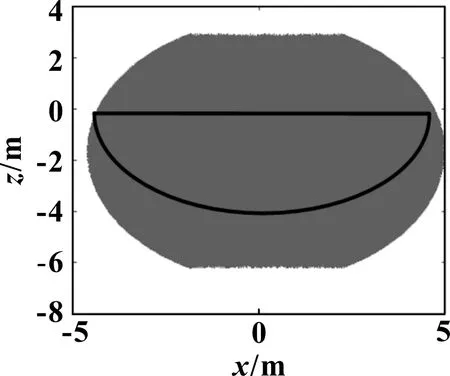
圖9 作業空間與理論修剪區域比較
4 樣機試驗
按照文中所設計的虛擬樣機研制了架空高壓線路走廊樹枝切割機器人試驗樣機,并在某大學自建模擬線路上進行了現場試驗。具體方法是:在地面將機器人組裝完成后,人工輔助機器人上線,同時準備一些不同粗細的樹枝放在機器人行走線路的不同空間位置以模擬現場作業環境,通過底面基站發出指令操控樹枝切割機器人完成修剪作業。機器人試驗樣機以及現場作業分別如圖10和圖11所示。

圖10 樹枝切割機器人試驗樣機
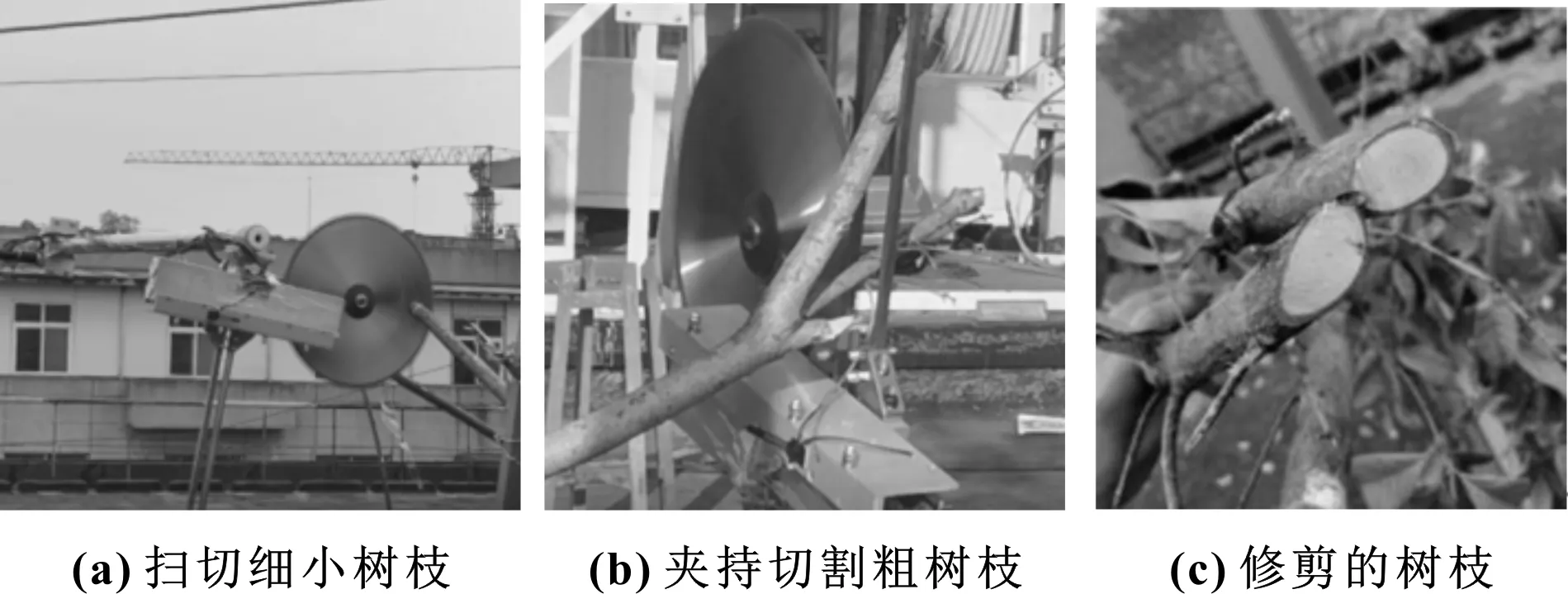
圖11 樹枝切割機器人修剪作業
結果表明:樹枝切割機器人各關節運動性能良好,對模擬環境下的樹枝修剪效果良好,對線路上各個方位的樹枝修剪完全,能夠滿足前文所述作業空間的覆蓋要求,切割的樹枝最粗可達60 mm且切口平整,具有較強的實用功能。
5 結論
分析風對架空導線的影響,得到了架空線路走廊樹枝的理論修剪區域,提出樹枝切割機器人原理構型;以110 kV高壓線路為例,依據機器人原理構型設計了虛擬樣機模型,對其進了作業規劃,之后建立了機器人運動學模型并求解了末端鋸片的作業空間,驗證了機器人結構設計的合理性;最后在自建線路上進行了樣機試驗,機器人樣機關節運動性能良好,能有效地完成樹枝修剪任務。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
