煤礦通風機自動控制調節系統的設計
2022-08-18 02:28:46許潔
山西焦煤科技 2022年7期
許 潔
(山西焦煤集團公司 投資有限公司, 山西 太原 030024)
近年來,隨著煤炭資源需求量的增大,礦井生產量也在逐步提升,礦井巷道的數量和采掘深度也隨之增大,使巷道管網阻力也相應地增大,直接造成礦井通風不良,導致安全事故的發生[1].因此,礦井通風系統需要具備自動調節控制功能以適應井下復雜多變的通風要求。礦井通風機自動控制方法有PID控制、模糊控制及模糊PID控制[2]等。其中,PID控制滯后性小、系統穩定性好,但是當滯后時間較長時,通風機風量會產生最大偏差量,導致調節至穩態的時間變長;模糊控制主要適用于時變、非線性系統,但其參數不易整定且確定規則后也不能輕易改動,并當被控對象變化時,往往也達不到預期目標[3];而模糊PID控制具備響應速度快、控制效果好、無超調,且出現時滯時,會出現超調,但是穩定性比較好[4].因此,為保證煤礦井下掘進作業所需的通風量,同時達到節約能源的目的,本文主要應用模糊PID技術、變頻調速方法對通風機自動控制調節系統進行設計研究,使各工作面滿足風量需求。
1 設計思路
通風機自動控制系統設計思路是應用模糊PID技術、變頻調速對通風機交流異步電機的輸入頻率進行控制調節,進而實現對通風機轉速的調節控制,完成對井下掘進工作面風量的閉環控制,并在保證礦井作業所需要通風量的條件下,有效節約能源。其工作原理是利用監控裝置傳感器采集數據信息,將采集到的信息傳輸給PLC,通過模糊控制算法、邏輯比較后,PLC再將輸出信號的信息反饋給變頻器,實現對通風機轉速進行控制調節。此外,通風機控制系統的現場總線和上位機監控系統進行信息交換,針對通風機距離井下掘進工作面比較長,通過串口光端機,將監測裝置傳感器發送的其他信號轉為光信號實現傳輸功能。該系統主要由系統主機、傳輸接口、傳輸電纜、電源箱、光端機、工業以太網交換機等組成。
2 通風機變頻調速原理
目前,井下通風機電機多采用異步電機[5],為實現變頻通風控制,本質上是異步電機的變頻調速過程,通過改變電動機供電頻率,同步轉速也發生變化,進而對電機調速,實現對通風機轉速的調節。交流異步電機轉速公式[6]為:
(1)
其中,n為電機轉速,r/min;f為電源頻率,Hz;p為異步電機的磁極對數;s為電動機的轉差率;ω為相應的角頻率,rad/s.
s=(ns-n)/ns-(ω1-ω)/ω1
(2)
其中,ns為異步電機的同步轉速[7],r/min;ω為固有角頻率,rad/s.
ns=60f/p=60ω1/2πp
(3)
對于同一臺通風機,當轉速由n1變為n2時,通風機各項參數[8]關系如下:
(4)
其中,n1、n2為通風機轉速,r/min;H1、H2為通風機轉速調節前后的風壓,Pa;N1、N2為通風機轉速調節前后的功率,kW.
因此,當通風機的風量、風壓不足或者存在富余量時,可通過調整通風機轉速對通風機的輸入功率進行改變。設定井下掌子面需風量是Q2,掘進初期通風機管路風阻值是H1,距達到最長管路風阻值是H2,通風機工頻運行時,風機風壓、風量關系曲線圖見圖1.
圖1中,掘進初期,當通風機工頻運行時,通風機送風量是Q1,輸出功率為矩形OH1AQ1面積;變頻調速運行時,通風機輸出功率為矩形OH3CQ2面積,矩形OH1AQ1面積明顯大于矩形OH3CQ2面積,這兩個矩形面積之差就是井下需要節省的風量。當遇通風最困難時期,通風機以最大轉速進入全功率運行狀態時,不再需要調節,直接切換為工頻運行,通風機工況為(Q2,H2),輸出功率面積為OH2BQ2.

圖1 風機風壓、風量關系曲線圖
3 通風機自動控制調節
通風機自動變頻系統是通過對傳感器監測的物質濃度進行模糊控制處理、邏輯比較,當出現任一物質的濃度值達到設定值時,控制信號立馬對變頻控制單元發送指令,使通風機頻率增大,并隨有害物質濃度的增加,通風機頻率也隨之增大,供風量也增大;當有害物質濃度過高時,且通風機滿負荷運轉仍達不到要求,系統就會自動進行報警。若井下某工作面風量需求較小或者暫停供風時,隨有害物質濃度的降低,通風機通過自動控制調節,運行頻率逐漸降低,供風量減小,并再次達到新的平衡狀態,直到供風量達到設定的最小通風量。通風機自動控制系統工作流程見圖2.
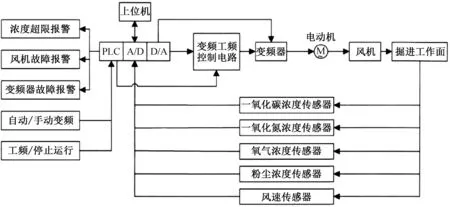
圖2 通風機自動控制調節系統圖
由于井下掘進工作面的環境、有害物質濃度屬于控制參數,且這些參數都是通風一段時間后才發生改變,也就是說通風機的調節與控制參數的變化有一定的滯后。同時,不同環境參數和通風機運行參數又不能建立精確的數學模型,因此,應用模糊PID控制[8]方法對通風機自動調節,通過計算機來解決復雜的數學模型,并執行人的控制策略。模糊PID控制系統圖見圖3.
模糊控制系統的基本組成見圖4.結合井下施工通風的要求,應用前饋式智能模糊控制方法,先依據通風機風管供風量來計算頻率參數,然后通過變頻通風控制系統對通風機轉速進行調節。

圖3 模糊PID控制系統圖
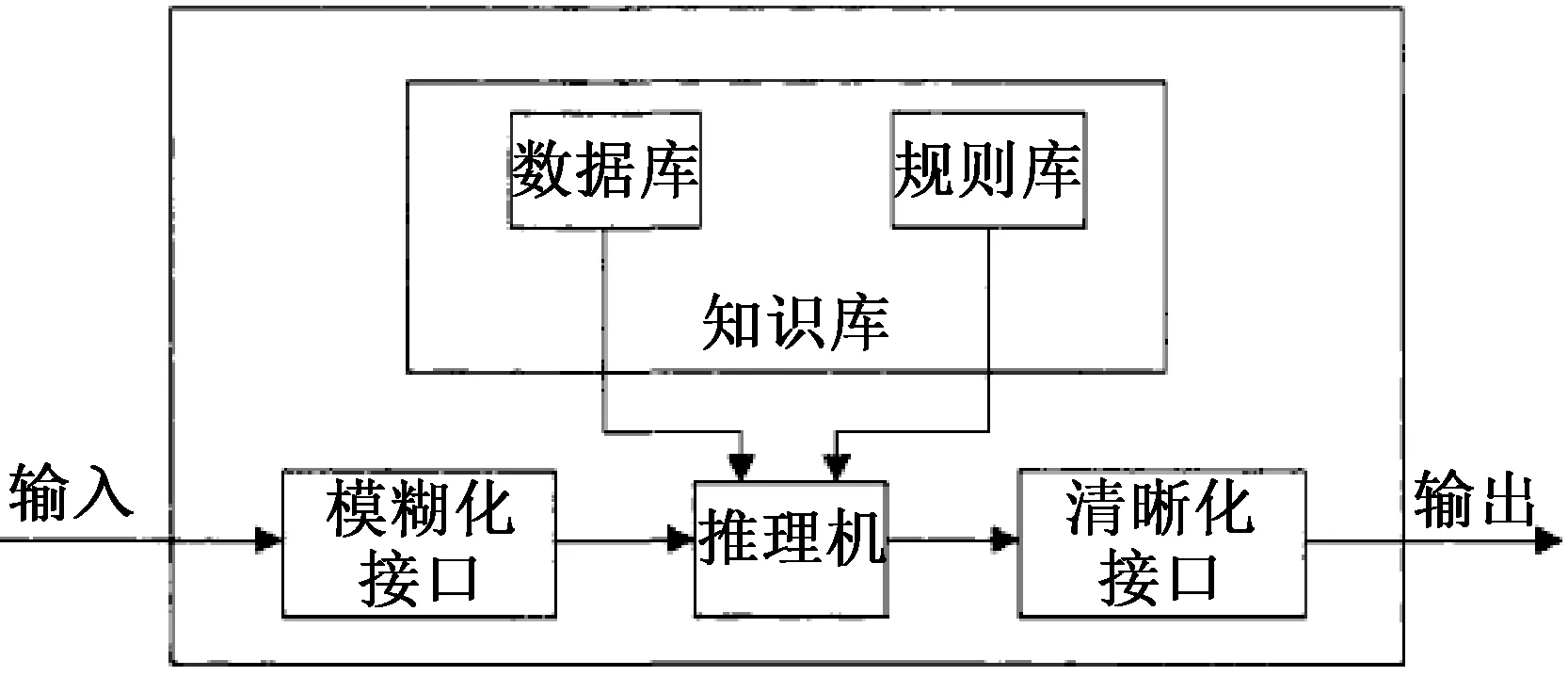
圖4 模糊控制器的基本組成圖
通風機變頻控制系統可建立一氧化碳濃度、粉塵濃度、氮氧化物和溫度4個相互獨立的模糊控制單元,還可以依據掘進面實際工作環境,建立相應的模糊控制單元。模糊控制系統將通過傳感器監測的有害物質濃度與標準要求濃度進行對比,計算得到有害物質濃度的偏差、偏差變化率;并依據井下有害物質濃度的模糊控制表,得到通風量以及最低風速要求的通風量中的較大值,實時控制調節變頻器的頻率,通過對風機電機轉速改變對通風機轉速、供風量進行改變,從而實現對礦井下作業環境風量的自動控制調節。
4 結 論
為保證煤礦井下掘進作業所需的通風量,同時達到節約能源的目的,對通風機自動控制調節系統進行設計研究,主要應用模糊PID技術、變頻調速對通風機交流異步電機的輸入頻率進行控制調節,進而實現對通風機轉速的調節控制,并利用自動控制調節系統對掘進工作面各種有害物質濃度指標進行監測,實時調整各工作面風量大小需求,實現節能控制。