司馬礦齒軌卡軌車風動擋車器改造設計
2022-08-18 02:28:52吳連勇
山西焦煤科技 2022年7期
吳連勇
(潞安化工集團 司馬煤業公司, 山西 長治 047105)
《煤礦安全規程》第三百七十條中明確指出,應在傾斜井巷內設置可以阻止跑車運行的防護裝置,凡新設計的運輸斜巷,必須同時設計相應的擋車裝置[1].阻車器,又被稱為擋車器,是為了防止跑車事故、減少跑車事故對人員傷害的擋車裝置[2].
司馬礦井下輔助運輸方式為德國沙爾夫ZL200-80齒軌卡軌車,配合有專用落地軌道,運輸量大,爬坡能力強,能滿足在30°的坡道上運送30 t貨載的需求,可一次將設備與人員運輸到位。該礦現已建立累計15 000余米齒軌車運輸線路,實現了二采區、三采區齒軌卡軌車運輸全覆蓋。該輔助運輸系統中采用風動擋車器,當齒軌卡軌車在運輸作業通過擋車器時,需停下齒軌車,人工操作進行開閉擋車器,效率低且勞動成本高。因此,提出遠距離自動控制擋車器開閉的方案,在原有擋車器風動操作基礎上進行模塊改造,以實現擋車器開閉自動化控制。
1 改造前風動擋車器工作原理
風動擋車器系統由控制手擋、通風管路、過濾器、單向閥、截止閥、蓄能器、排氣節流閥、換向閥氣缸、擋車塊等組成,見圖1.
卡軌車行進至擋車器前時,司機預判距離提前停車,跟車工下車后步行至擋車器操作手把前,將手把由“0”位打到“1”位,此時截止閥通過風源,風源由進氣口I連通接口B,氣缸右腔作用收回氣缸推桿,接口A連通出氣口O將氣缸左腔空氣排出, 擋車器隨之打開;跟車工將手把由“1”位打到“2”位,截止閥接通風源,進氣口I連通接口A,進入氣缸左腔室推出氣缸推桿,接口B連通出氣口O將右腔室氣體排出, 擋車器隨之關閉。
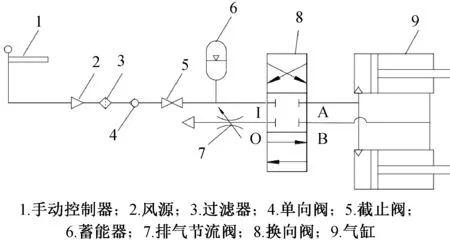
圖1 風動擋車器圖
2 設計目標
1) 上平處擋車器與變坡點下方的跑車防護欄處于聯鎖狀態,兩處阻車器不能同時開合。
2) 擋車器和跑車防護欄正常時常閉,僅當卡軌車經過時開合。
3) 擋車器實現遠程遙控控制,實現與卡軌車聯動。在卡軌車運行時可進行遠距離遙控自動打開,過安全裝置后遙控關閉阻車器。
4) 當遠距離遙控控制或控制系統出現問題時,可手動控制擋車器開閉。
3 設計方案
3.1 改造后擋車器工作模塊設計
改造后擋車器工作模塊包括遙控器、控制系統、電磁閥、風動阻車器、風動控制模塊、信息提示模塊。其中電磁閥選擇LD74A-23兩位三通;控制系統主要包括PLC主控制器、本安型語音模塊、本安型顯示模塊、位置傳感器、無線通訊模塊。控制系統工作原理見圖2.
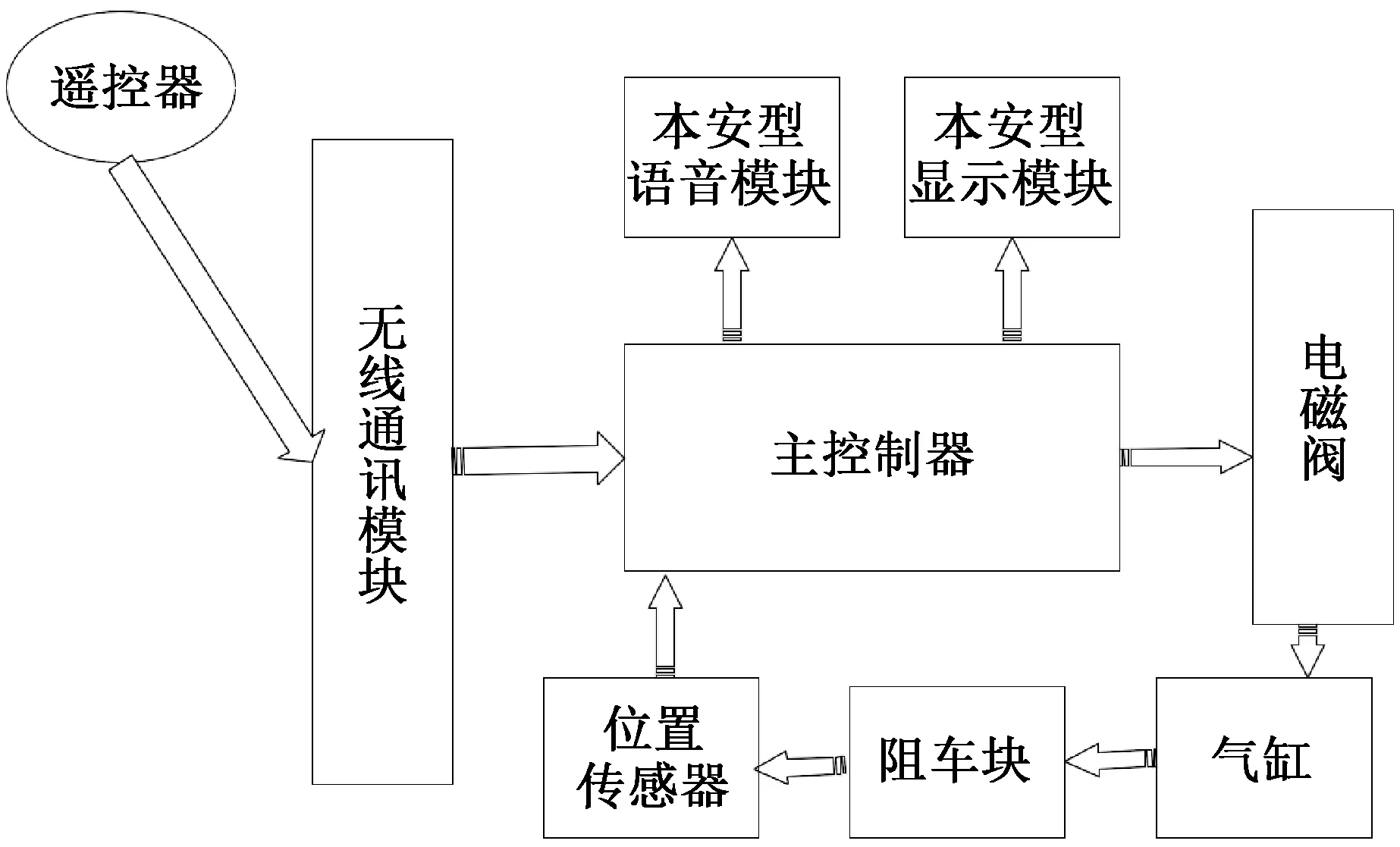
圖2 控制系統工作原理圖
3.2 改造后擋車器系統工作原理
在卡軌車行進過程遇到擋車器時,可由司機在車廂內按下遠程遙控擋車器按鈕,向控制器發出指令,控制器接收到信號后,電磁閥感應動作,風源進入進氣口I連通接口B,氣缸右腔作用從而收回氣缸推桿,接口A連通出氣口O將氣缸左腔空氣排出,同時位置傳感器檢測阻車塊的位置,在預設時間內檢測阻車塊到達指定位置并反饋給主控制器控制電磁閥,顯示模塊以及語音模塊顯示阻車器的狀態,提供操作觀測攔車器動作狀態,擋車器可打開;當列車通過后,再次按下相應擋車器按鈕,向控制器發出指令,電磁閥感應后移動閥芯,使氣流換向,進氣口I連通接口A,進入氣缸左腔室推出氣缸推桿,接口B連通出氣口O將右腔室氣體排出, 擋車器隨之關閉[3-4].改造后擋車器的工作原理見圖3.

圖3 改造后擋車器的工作原理圖
同時,此改造保留了原來的風動操作功能,在風動控制單元上設置了風控按鈕,這樣在電控出現故障等緊急情況下,還可進行手動操作,可以有效保證運輸過程安全。
4 應用效果
1) 提升了工作效率。使用原手動控制風動擋車器,每通過一道擋車器時齒軌卡軌車司機需停車2次,跟車工需上下車進行手動操作,作業影響時間為2 min,每班運輸至少需要開閉約20道擋車器,總共影響約40 min.改造后,司機在車上即可開閉擋車器,不需要人員上下車操作手把,此時該齒軌卡軌車行駛速度為1 m/s,同理計算得一部齒軌車每班可多行駛40×60×1=2 400 m.相同作業時間內,工作效率高。
2) 降低了勞動成本。原來每部齒軌卡軌車需配備6名運輸人員,改造后僅需要配備4人即可滿足運輸要求。司馬礦井下現配備6部齒軌卡軌車,每班可實現運輸減員12人。
5 結 語
通過安裝使用遠距離遙控式攔車器,解決了制約其運輸效率的擋車器人工開閉問題,實現遠距離遙控開閉擋車器,在提高輔助運輸系統自動化、智能化的同時降低了工人勞動強度,提高了工作效率。