帶倒車功能的水上救援機器人控制系統的設計
2022-07-25 12:39:54周軍
延安職業技術學院學報 2022年3期
關鍵詞:方向
周 軍
(九江職業大學,江西 九江 332000)
引言
無論是在游泳館、海邊等公眾場所還是河邊池塘等有水的地方,發生溺水死亡事件數不勝數,經專業人士分析,一般人在溺水后2-3分鐘左右就會停止呼吸,且在缺氧情況下5分鐘左右就會導致腦細胞的死亡。如能在剛停止呼吸的4-6分鐘之內進行心肺復蘇等急救措施,其成活率比較高。
目前很多公眾場合還是采取救生員或者水中放入救生圈的方法進行安全管理,其缺點是人工可能會錯漏救援信息,且其救援速度慢,易錯過最佳救援時間。如遇惡劣天氣還會加大救生員的危險系數。而水上救援智能機器人實現了自動救援功能。
現在的水上救援機器人只能遙控運行到目標點,如果超過目標點則需要繞一個圈掉頭重新進行定位,浪費了救援時間,故在現有水上救援機器人系統中加入倒車系統,可以為應急救援贏得更多的時間。
一、控制系統硬件結構
帶倒車功能的水上救援機器人的控制系統硬件主要由主控電路板、執行機構和視覺相機檢測裝置組成。主控電路板包括:電源整流裝置、控制器檢測信號和輸出信號接線;主控制器采用樹莓派Raspberry Pi 4B;執行機構有直流無刷電機作為動力電機,三相混合式步進電機作為方向控制電機;視覺相機檢測裝置主要采用Raspberry Pi Camera Module 2 NoIR視覺相機和通訊模塊,視覺相機安裝在救援機器人前端,通過視覺技術實現實時監控水面情況的功能,再通過通訊模塊將信號反饋。
二、控制流程圖設計
采用機器視覺技術實時監控水面情況,將是否有溺水事件進行反饋,信號反饋到控制中心和遙控裝置兩處。遙控裝置方便操作人員手動確認目標點是否正確,若確認錯誤則取消救援行動,若確認正確或規定時間未確認則控制中心默認正確,機器人立即規劃達到目標點的多段直線子路徑。機器人打開方向電機,按照第一個子路徑調整運行方向,啟動動力電機控制螺旋槳運行至第一個方向。在運行過程中實時判斷是否出現新的障礙物,關閉動力電機,重新規劃路線,調整方向運行至新路線。完成當前子路徑后判斷是否有下一段子路徑,如有則調整方向繼續前進,直到完成所有子路徑路線到達目標點。在運行過程中由于速度過快發現超出目標點時,調整方向電機,開啟動力電機控制螺旋槳進行倒車,快速到達目標點。檢測到溺水者攀附在救援機器人上,等待一段時間后救援機器人規劃返航到指定安全位置的路線,與前面救援流程類似,同樣調整方向電機,啟動動力電機按照子路線返航。返回過程中遇到新障礙物則重新規劃路線調整方向電機,直到完成所有子路徑達到安全位置。控制流程圖如圖1所示。
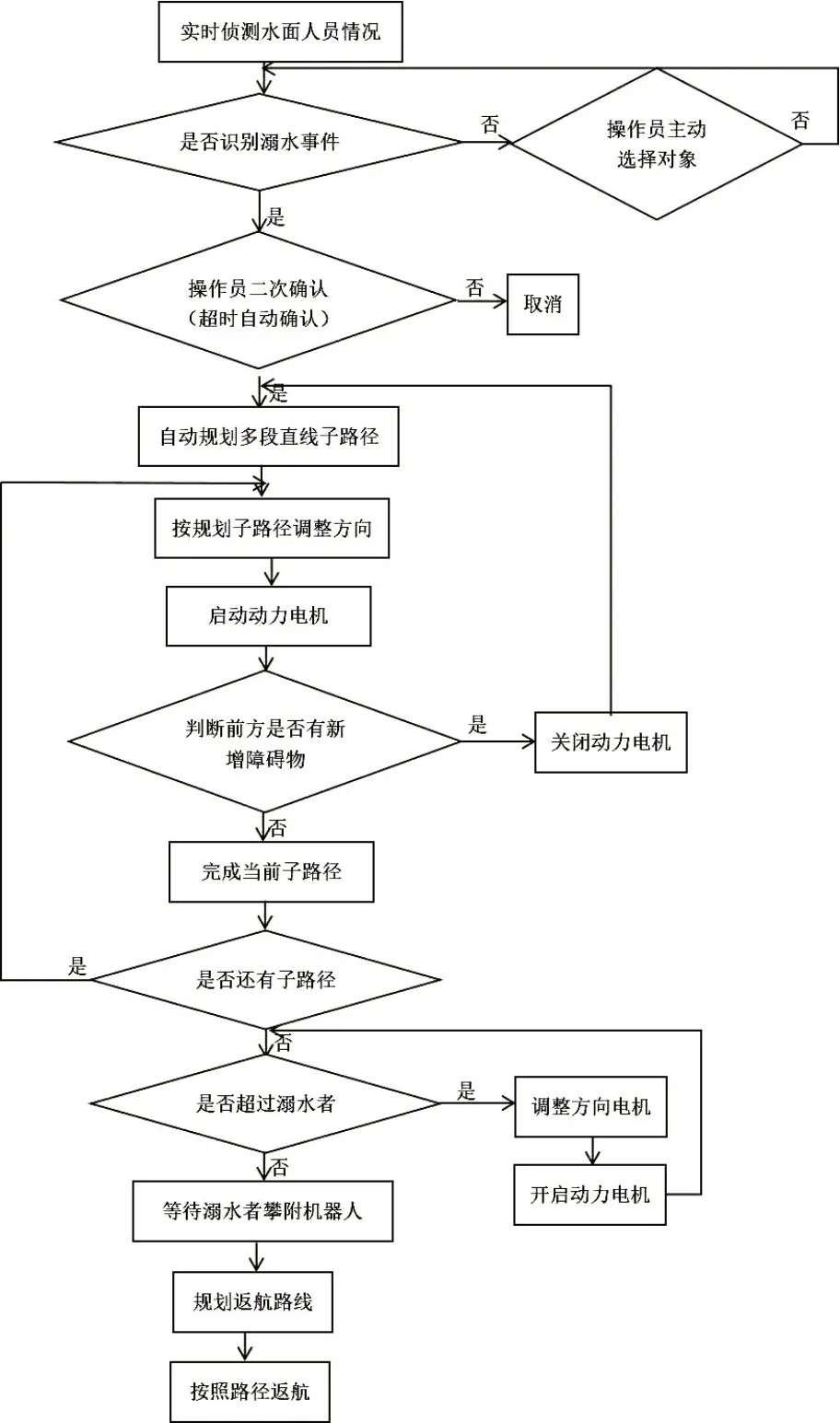
圖1 控制流程圖
三、電路原理圖設計
整個系統采用樹莓派Raspberry Pi 4B 作為主控制器,電源整流裝置經過濾波整流后將直流5V電源供給主控制器,將直流24V電源供給直流無刷電機(動力電機)和三相混合式步進電機(方向控制電機),利用Raspberry Pi Camera Module 2 NoIR 作為視覺相機,通過視覺技術判斷是否有待救援人員。2.4GHZ的射頻模塊作為通信模塊,是一種遠程的控制方式,可以實現2400M-2483MHZ范圍內的點對點近距離無線傳輸通信,其使用方便,可以短距離傳輸。電路原理圖如圖2所示。
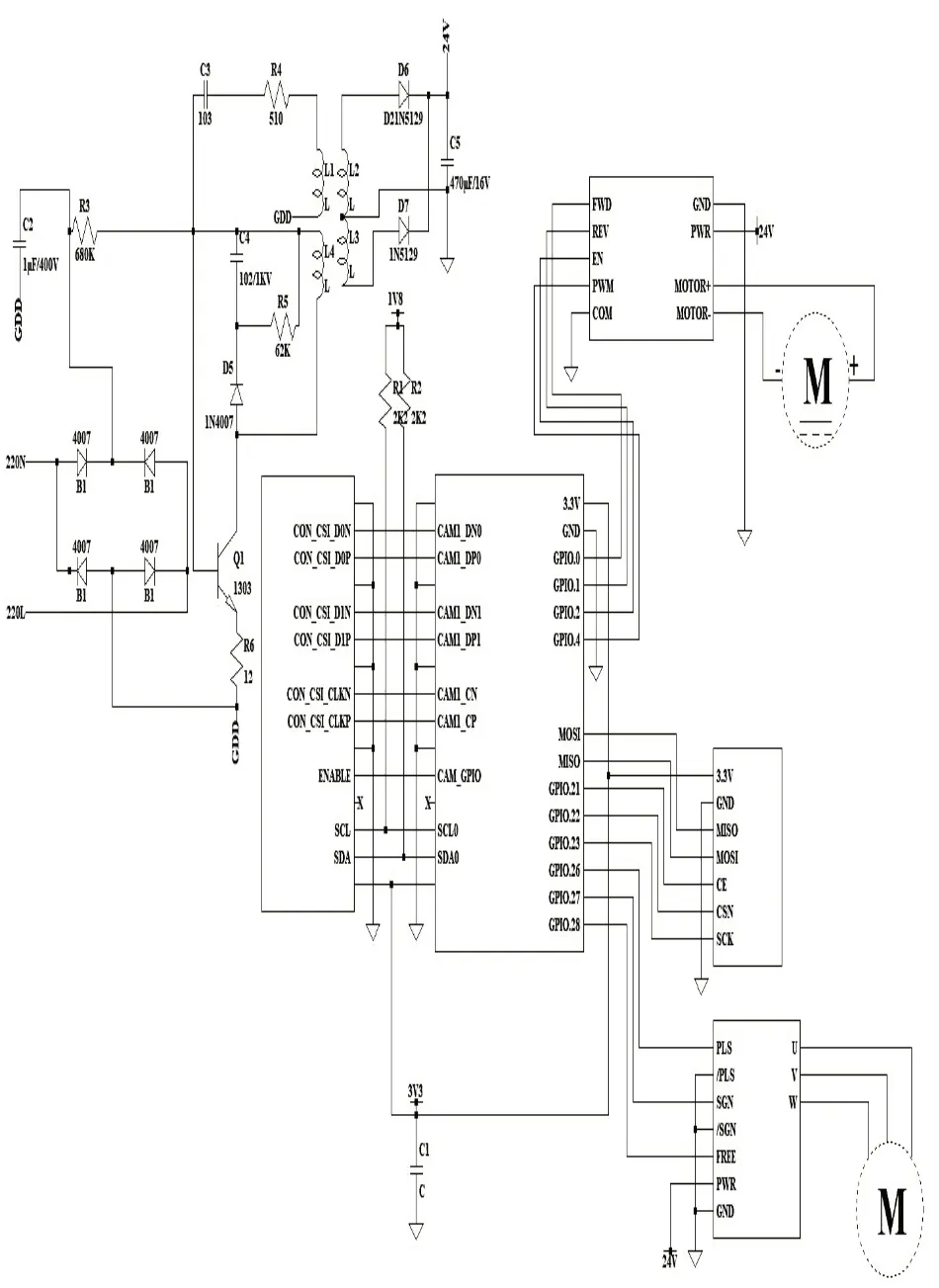
圖2 電路原理圖
四、樹莓派和PWM的控制
(一)PWM控制
直流無刷電機具有不易磨損、出故障概率低、性能可靠、壽命長、啟動轉矩高和機械特性好等優點,作為水上救援機器人的輸出電機,性能穩定且調速方便。脈沖寬度調制(PWM,Pulse Width Modulation)用于直流無刷電機的調速控制是一種簡單高效的方式。
脈沖寬度調制(PWM)利用控制器的數字輸出信號對直流電源開關頻率進行控制,從而改變直流無刷電機負載兩端的電壓,以此來達到調速的效果。
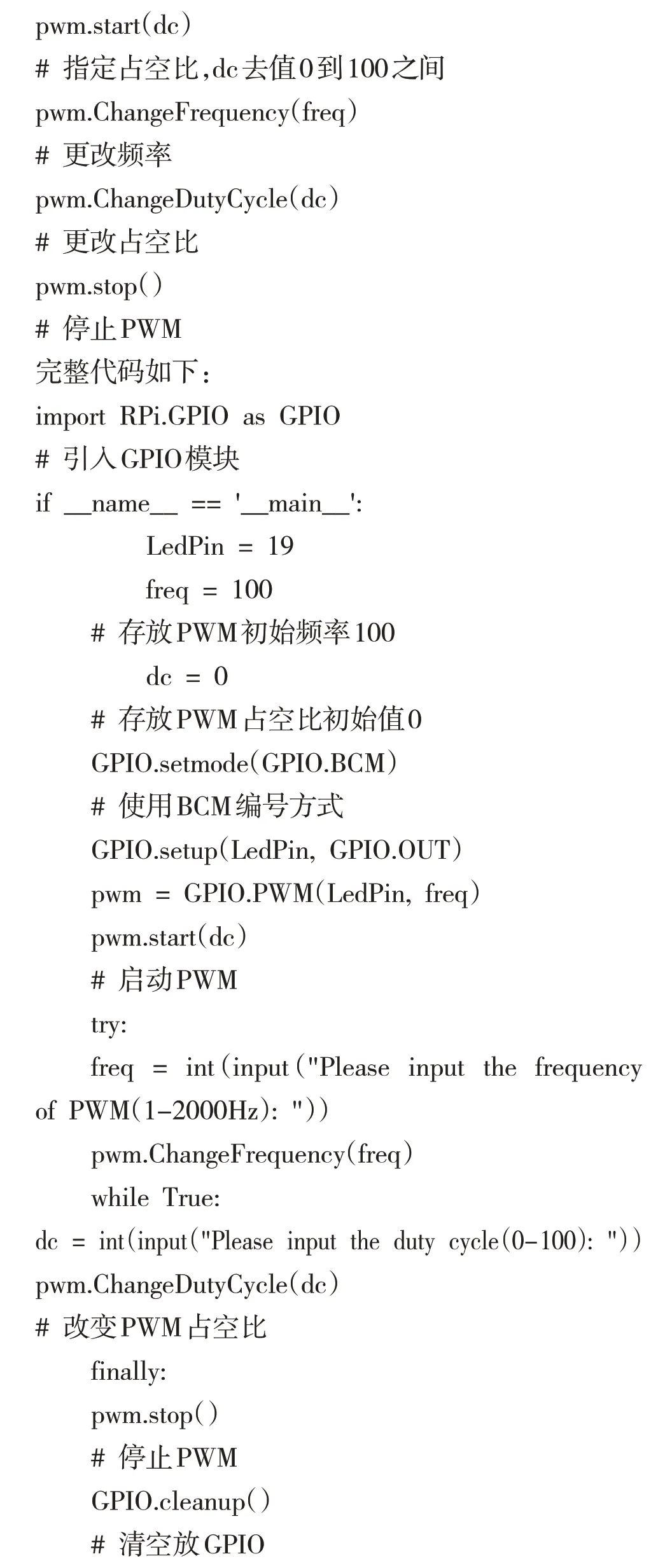
(二)樹莓派對PWM的控制
本系統利用樹莓派的ARM Cortex-A72嵌入式芯片作為CPU 單元。樹莓派自身的庫里提供了PWM功能,因此利用GPIO的編程就可實現PWM控制。基礎代碼詳解如下:

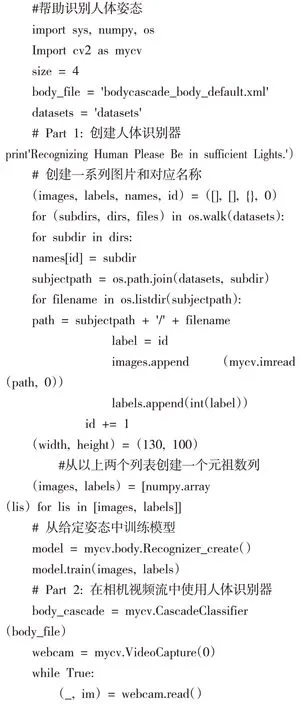
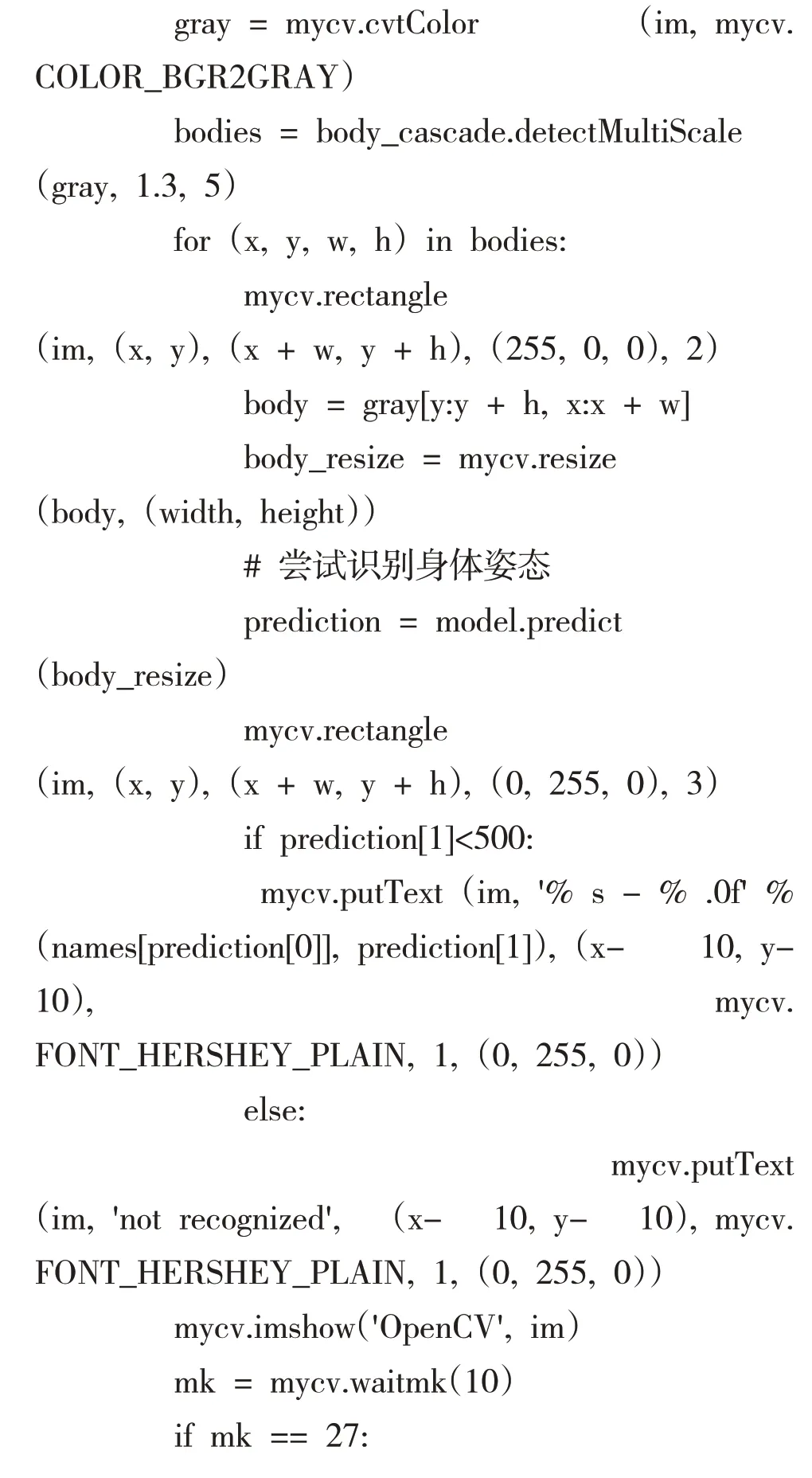
五、機器視覺控制
機器視覺相機與樹莓派控制器相連,通過LBPH局部二進制模式直方圖算法來提取人的身體特征,使用以下4個特征參數:
特征參數1:像素半徑,用來創建圓形局部二值模式并表示中心像素區域的半徑。
特征參數2:Neighbors,用來創建圓形局部二進制模式的樣本數。
特征參數3 和4:Grid X 和Grid Y,水平和垂直方向的單元格數。
用各種人體姿態進行帶標簽訓練,后獲取測試數據,確定哪些標簽為正常姿態標簽,再對水面所有人員進行實時監控,對應帶正常標簽數據的則確定為正常,否則確定為異常。

六、實驗結果
該系統研制出一款新型的充氣式高效救援設備,對落水人員快速施救時,救援人員可以直接手持遙控器駕駛或者在岸上通過手持遙控器控制救援機器人下水施救,該設備攜帶輕便,氣囊可儲存在拉桿箱中,展開時間僅為20 秒,純電驅動,8KW 功率,25KG推力,最快速度可達30公里/小時,可在波浪中穩定轉彎,抗風浪行進,急速倒車,最大載重量為160KG,機器人可同時救起7名落水者。
帶有倒車功能的水上救援機器人能夠通過機器視覺控制識別救援信號,準確快速到達目標點,節約了人力資源,同時提高了水上救援成功率。經過多次實驗和后期不斷改進機器視覺的算法,以期提高識別率,從而提高救援的準確性。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50