基于深度神經網絡的流場時空重構方法
2022-07-14 02:17:06韓仁坤劉子揚錢煒祺王文正陳剛
實驗流體力學 2022年3期
關鍵詞:深度
韓仁坤,劉子揚,錢煒祺,王文正,陳剛,2,*
1.西安交通大學 航天航空學院 陜西省先進飛行器服役環境與控制重點實驗室,西安 710049
2.機械結構強度與振動國家重點實驗室,西安 710049
3.中國空氣動力研究與發展中心,綿陽 621000
0 引 言
粒子圖像測速(Particle Image Velocimetry,PIV)是一種基于流場圖像分析的非接觸式瞬時全流場測量技術,它可以獲取流場的準確定量信息。PIV 實驗使用的硬件設備主要包括光源系統和成像系統,二者的品質決定了成像質量和測量范圍等性能參數。PIV 測量對硬件設備的高要求導致了實驗成本的增加,要實現流場的高精度、高分辨率測量只能購買昂貴的PIV 測量儀器,因此研究基于數據驅動的流場時間和空間高分辨率重構技術很有必要。
近年來飛速發展的人工智能技術已經對人類的工作和生活方式產生了顛覆性的影響。其中,推動人工智能發展最主要的動力就是深度神經網絡。由于具備強大的非線性描述能力和深度特征捕捉能力,深度神經網絡已在圖像處理、語言翻譯、疾病診斷、游戲競賽等眾多領域取得了驚人的成就。自從Ling 等將雷諾不變量引入神經網絡以修正雷諾平均湍流模型后,深度神經網絡在流體力學領域的應用研究已成為一個研究熱點。研究者們使用深度神經網絡在控制方程學習、流場重構和響應預測等方面展開了研究。
例如,流場重構時使用深度神經網絡的強大表征能力,直接從流場數據中挖掘規律,并重現出流場整場信息。Sekar 等使用深度神經網絡預測不同翼型在不同狀態下周圍流場的分布情況,首先使用卷積神經網絡(Convolutional Neural Network,CNN)提取翼型的形狀特征,然后將其與來流狀態組合在一起,最后使用全連接神經網絡預測翼型周圍流場分布。Jin 等研究了表面壓力與流場分布之間的映射規律,使用混合卷積神經網絡,以圓柱表面壓力分布為輸入,預測圓柱周圍流場分布情況。在不同雷諾數情況下,均能得到準確的預測結果,流場數值及結構均與真實值吻合良好。Han 等對流場的時空演化過程進行研究,構造了一種基于卷積神經網絡和長短時記憶神經網絡(Long-short-term Memory Neural Network,LSTM)的混合神經網絡,使用前幾個時間步(dt)的高維流場預測下一時間步的高維流場。惠心雨等將條件生成對抗網絡與卷積神經網絡相結合,改進了條件生成對抗網絡對生成樣本的約束方法,基于改進的回歸生成對抗網絡深度學習策略能準確預測出指定時刻的流場變量。
針對實驗或者模擬數據中不同分辨率數據之間的轉換問題,Fukami 等使用混合卷積神經網絡對低分辨率數據進行高分辨率重構。通過DNS 數值模擬得到低分辨率和高分辨率數據,低分辨率數據是高分辨率數據經過平均池化或最大池化的結果。其使用間斷跳躍卷積神經網絡,以低分辨率數據為輸入,通過多次卷積得到對應的高分辨率流場。Lagemann 等嘗試將深度神經網絡應用于PIV 測量結果分析:首先使用全連接神經網絡計算2 幀測量圖像之間的相關性;然后使用卷積神經網絡將此相關性添加至第一幀圖像,并得到空間粒子點的速度矢量;最后將得到的矢量圖進行高分辨率重構,得到高質量的速度分布圖。朱浩然等嘗試將深度神經網絡在PIV 測量結果分析中的應用拓展至三維范圍。
當前深度神經網絡在PIV 測量技術中的應用大多集中在計算分析2 幀相鄰圖像中粒子的速度矢量,對速度場的高分辨率重構研究很少,尤其是時間維度的高分辨率重構。本文利用卷積神經網絡和長短時記憶神經網絡設計了一種低分辨率流場數據的時間和空間高分辨率重構方法,能夠以較低成本獲得高質量的流場準確定量信息,提高實驗效率,節約實驗成本。
1 方 法
1.1 空間高分辨率重構
PIV 實驗測得的流場數據通常分辨率較低,為了提高結果的分辨率,需要使用更高性能的相機和計算機,這將導致實驗成本急劇增加。卷積神經網絡自身具有局部連接和權值共享特性,能夠更準確地學習全局整體特征,局部噪聲對特征學習的影響不大。實驗數據中經常包含多因素導致的誤差,而卷積神經網絡可以忽略這些誤差,抓住數據的主要結構特征。構建了一種基于卷積編碼機(CNN encoder)和卷積解碼機(CNN decoder)的深度神經網絡結構,如圖1所示,其中,F代表低分辨率流場數據,F代表高分辨率流場數據。使用該深度神經網絡能以較低成本將低分辨率測量結果重構為高分辨率結果,從而獲得更多的流場細節特征。

圖1 空間重構深度神經網絡結構示意圖Fig.1 Structure of deep neural network for spatial reconstruction
編碼機與解碼機原理基本相同,都是通過卷積過程學習輸入數據的特征。其不同之處在于:學習數據特征的過程中,編碼機將輸入數據尺寸降低以獲得更抽象、更深層的特征,而解碼機在學習過程中將輸入數據尺寸放大,更詳細地展示學到的特征。將實驗測得的低分辨率數據輸入到該深度神經網絡后,編碼機首先對數據進行卷積降維,生成數據的深層特征空間;然后對深層特征空間里的流場特征進行升維,得到高分辨率流場數據。這樣不僅可以實現數據從低分辨率到高分辨率的重構,還能獲得數據的深層結構特征。這些特征可用于流場結構和演化過程的進一步分析。
本文中所使用的低分辨率數據形狀為14×14,高分辨率數據形狀為100×100。因此,重構后的流場數據空間數據點數是原來的 51 倍,重構后流場分辨率得到顯著提高。針對此數據采用的編碼機包含兩層卷積過程,每層中卷積核的大小均為3×3,滑移步長分別為1 和2,得到的深層特征尺寸為7×7。解碼機包含5 層卷積過程,逐步將尺寸為7×7 的深層特征重構為100×100 的高分辨率結果。
1.2 時序預測及校正
長短時記憶神經網絡是一種用于學習時序數據中時間演化特征的神經網絡,其每個神經元包含3 個門(圖2):輸入門i(增加有用信息至神經元狀態c),遺忘門f(從神經元狀態中剔除無用信息),輸出門o(輸出信息h至下一神經元)。通過不斷在神經元狀態參數c上添加或去除信息,使神經網絡學習到多個時間步的時序數據x在時間維度上的演化關系。在LSTM 神經網絡中,每個LSTM 的單元輸入有3 個,包括當前時刻網絡的輸入值x、上一時刻LSTM 的輸出值h以及上一時刻的單元狀態c;單元輸出有2 個,包括當前時刻LSTM 輸出值h和當前時刻的單元狀態c。本文中x 對應不同時間步輸入流場數據,h 和c 則作為內部參數在神經網絡中傳遞。
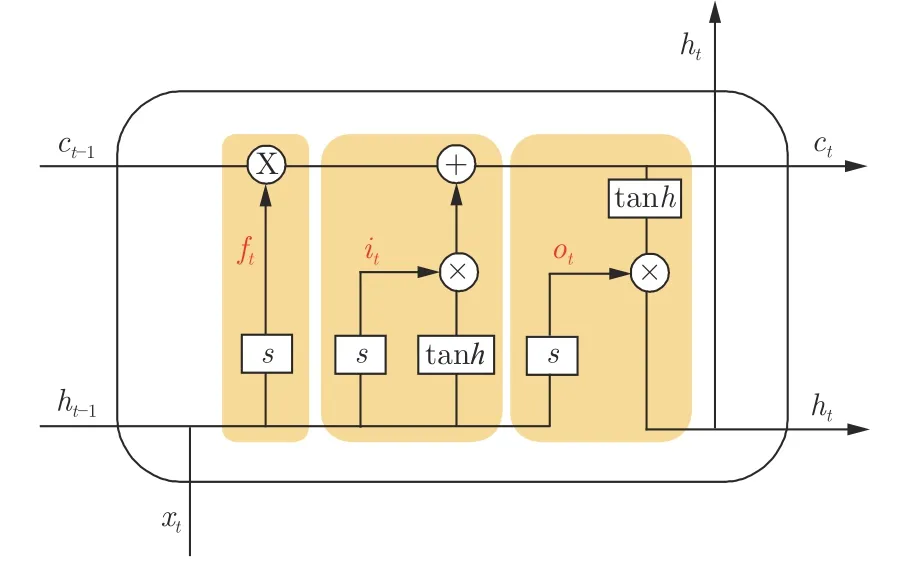
圖2 長短時記憶神經網絡的神經元結構圖Fig.2 Sketch of neuron structure in LSTM
在進行流場數據時間維度高分辨率重構時,構建長短時記憶神經網絡學習流場演化過程,使用前3 個時間步流場數據預測下一時間步流場數據。與上一小節中空間高分辨重構網絡相結合,長短時記憶神經網絡即可在深層特征空間上運算,預測下一時刻的流場特征,從而實現下一時間步流場高分辨率預測;預測得到的流場可以作為下一步預測的輸入。因此,給定初始狀態后,神經網絡可以進行持續預測,如圖3所示,圖中上標代表時間步。從圖中可以看出,在完成一個時間步預測得到高分辨率流場后,對其進行下采樣,降低至與輸入數據匹配的維度后,再與已知時刻流場數據和相結合,即可進行下一時間步流場預測。不同數據的結合方式為:上一時刻預測的輸出通過CNN encoder 提取流場特征,將特征作為x 輸入到LSTM 層的神經元中;前兩個時間步數據也需要提取特征,然后將特征輸入到LSTM 層的其他神經元中,完成對下一時間步流場的預測。
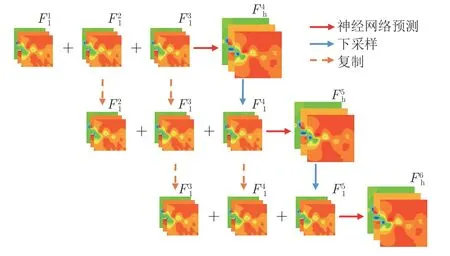
圖3 流場時空重構數據流動示意圖Fig.3 Sketch of data flow in flow field spatio-temporal reconstruction method
深度神經網絡結構如圖4所示,此神經網絡包含編碼機、LSTM 和解碼機3 部分。其中,編碼機對數據進行卷積降維生成數據的深層特征空間;LSTM捕捉深層特征空間內不同時間步流場演化過程,并預測下一時間步流場特征;解碼機對深層特征空間內的流場特征進行升維,得到高分辨率流場數據。深度神經網絡各部分結構的參數如表1所示,除了最后一層不使用激活函數,其他層均使用Relu 函數作為激活函數。
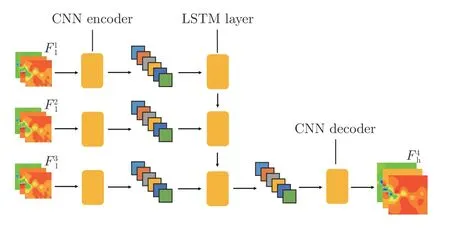
圖4 深度神經網絡結構示意圖Fig.4 Sketch of deep neural network structure
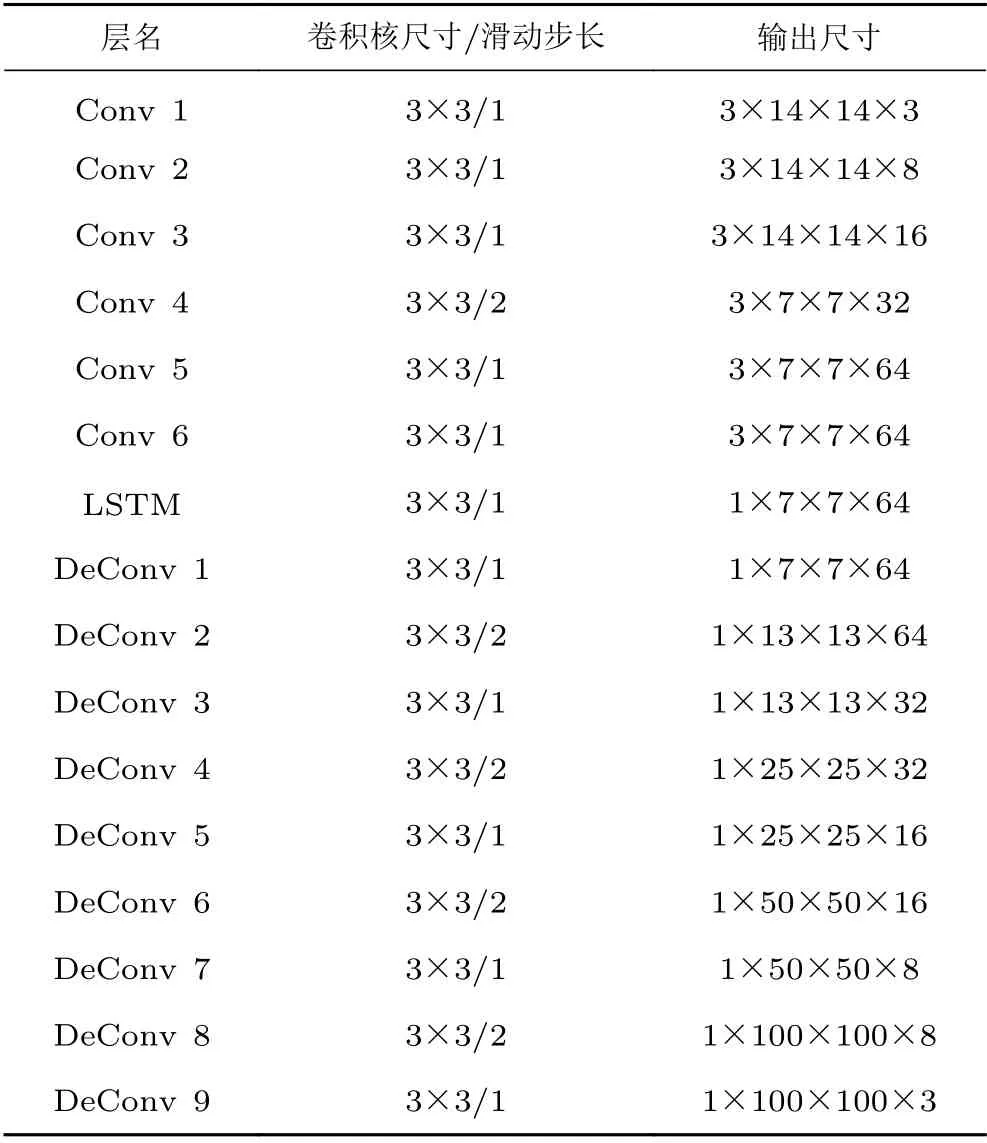
表1 深度神經網絡結構參數Table 1 Details of the structure parameters in the hybrid deep neural network
但是,在時間維度進行流場持續預測過程中,誤差積累會導致后續預測結果與真實值偏差越來越大。因此,在預測過程中需要不斷對預測過程進行校正,使預測誤差保持在合理水平。本文通過在預測過程中不斷加入已知時刻數據對預測過程進行校正,兩個校正時間步之間得到的流場數據即可理解為在時間維度上的加密過程,提高了時間維度的分辨率。如每隔5 個時間步校正一次,則在時間維度的密度為原數據的5 倍。
1.3 神經網絡訓練
由于高分辨率重構方法很難用真實的實驗數據直接進行驗證測試,而實驗測量數據與模擬數據的區別只在于實驗數據含有實驗裝置和實驗方法導致的各種誤差,因此可以通過在數據集中添加噪聲的方式使模擬數據符合實驗數據分布規律。實驗數據能給出的規律及存在的問題,經過處理后的模擬數據同樣可以給出,因此使用模擬數據同樣能夠證明本文提出方法對實驗數據的適用性和有效性。本文使用人工合成數據對重構結果進行驗證測試。
通過數值模擬方法得到不同雷諾數(Re)條件下二維圓柱繞流流場演化過程。CFD 求解器采用自主開發的多塊結構化網格求解器,計算網格如圖5所示。求解基于有限體積法,空間離散格式為二階Van Leer 格式,時間推進方式為LU-SGS 隱式方法,時間步長均設置為0.02 s,保存每一時間步完整流場。
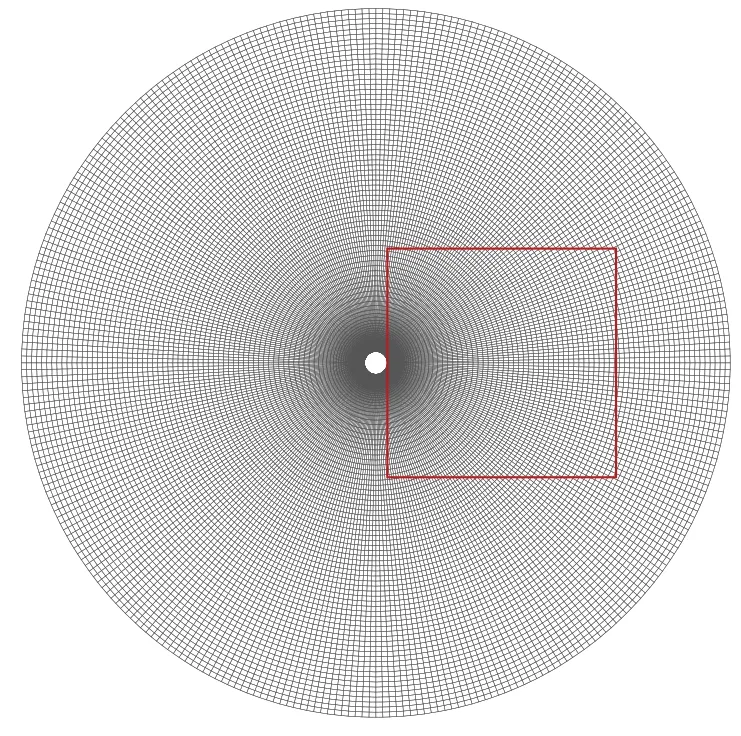
圖5 結構化網格Fig.5 Structured grid
截取部分區域流場,范圍如圖5中紅色方框所示,并對其進行無量綱化,得到無量綱的壓力(p)和速度(U,V)。將無量綱流場數據投影到不同分辨率的網格點上,即可得到高分辨率流場數據和低分辨率流場數據。每個狀態取400 個時間步流場作為數據集,選取范圍為圓柱繞流尾流場中渦脫落達到穩定狀態后的階段。將每個時間步流場數據投影至尺寸為100×100 且均勻分布的網格點上,每個狀態得到的數據集尺寸為400×100×100×3。為了使模擬數據更加貼近實驗數據,需額外在低分辨率流場數據中添加噪聲,以模擬實驗時產生的各種誤差。添加的噪聲為隨機噪聲,其均值為0,方差為0.1。數據集為經過無量綱化的數據,壓力和速度值均在1 附近,因此添加的噪聲大小在10%左右。
神經網絡的訓練過程是一個神經網絡內權值和偏置值逐步尋優的過程,輸入數據前向傳播,誤差反向傳播。本文采用均方根誤差(RMSE)作為損失函數評價預測結果好壞,計算方法如式(1)所示:
式中,為i 位置點的預測值,ψ為i 位置點的真實值,N 為數據點的個數。神經網絡的每一步訓練均需先計算均方根誤差,再求得該誤差對需要優化的每一個參數的導數,然后通過自適應矩陣估計算法(Adam)根據誤差的導數更新神經網絡中的參數。完成一個時間步參數更新后,輸入新的數據計算預測誤差,再計算導數,然后進行參數更新。重復此過程即可逐步提高神經網絡的預測精度,當神經網絡的預測精度達到要求時即可停止訓練。整個訓練過程是基于開源平臺TensorFlow 框架自動運行的。訓練完成的神經網絡可用于相似問題的快速預測。訓練環境為英偉達RTX2080Ti 顯卡,顯存10 GB。在該環境下每次訓練時長為12 h。
2 結果及討論
測試算例使用雷諾數分別為300、400、500、600 時的二維圓柱繞流數據作為訓練集訓練神經網絡,使其學習雷諾數為300~600 的二維圓柱繞流流場演化過程;使用雷諾數為550 時的數據作為測試集,測試集中添加與訓練集不同類型的噪聲。測試集的數據在訓練時未輸入到深度神經網絡中,因此深度神經網絡對測試集的預測結果可以較好地顯示其泛化能力。下文展示了該混合深度神經網絡的空間高分辨率重構能力和時空同時重構能力。
圖6為瞬態流場高分辨率重構結果,第一列為重構結果,第二列為數值模擬結果,第三列為重構結果相對于數值模擬結果的誤差;圓柱直徑為D,圓心位于坐標(0,0)處。可以看出重構出的高分辨率流場與真實流場吻合較好,二者的RMSE 為0.006 5。圖7是以真實流場中每個數據點的變量值為橫坐標、以對應點的高分辨率重構結果變量值為縱坐標作出的數據點分布圖,真實值與預測值越接近,則該數據點位置越接近y=x 參考線。圖中所有數據點均分布于參考線附近很小的范圍內,更加直觀地展示了高分辨率重構結果的準確性。

圖6 空間高分辨率流場重構結果與數值模擬結果對比Fig.6 Comparison of spatial high-resolution reconstruction results and numerical simulation results

圖7 流場重構值與真實值對比散點圖Fig.7 Scatter of comparison between reconstructed flow field value and ground truth flow field value
在進行時空高分率辨重構時,將實驗測得的測試狀態下3 個時間步流場作為神經網絡的初始化輸入。圖8為基于初始化3 個時間步流場數據的流場時空重構結果,以及順流方向速度場在經過不同時間步后的高分辨率預測結果與真實值的對比。從圖中可以看出,初始時間步的預測結果與真實值之間吻合較好,但是隨著預測時間步的增加,誤差也在逐漸積累(圖9中紅色曲線),導致一定時間步之后預測結果與真實值之間的誤差已經超出可接受范圍,此后的預測結果不再滿足需求。因此需要在預測過程中不斷添加正確信息。

圖8 無校正時不同時間步流場重構結果與數值模擬結果對比Fig.8 Comparison of flow field reconstruction results without correction and numerical simulation results at different time steps
圖9中綠色曲線為每隔5 個時間步添加一次校正數據后的誤差變化過程,黑色豎直虛線表示添加校正數據的位置。此過程可視為一種時間維度加密過程,相對于已知流場數據,一個時間步變成了5 個時間步,因此添加校正后預測得到數據時間維度密度為原始數據的 5 倍。研究發現,用已知時間步的準確低分辨率數據代替深度神經網絡預測得到的高分辨率數據進行下采樣,將其結果作為下一時間步的輸入數據,預測誤差不會持續增加;但在插入校正數據的時間步后,下一時間步的預測誤差會突然增大。這是因為深度神經網絡在前幾個時間步的預測過程中已經產生了一定的誤差,相比于真實流動的趨勢已經產生了改變,直接將真實數據插入到深度神經網絡預測過程中,會導致輸入數據中前后時間步的數據不匹配,從而改變深度神經網絡自身的預測趨勢,導致預測誤差突然增大。
在校正時間步中插入的數據應既能保持深度神經網絡的預測趨勢,也能改善預測得到數據的準確性。將深度神經網絡預測數據與已知真實數據按比例混合,作為下一時間步預測的輸入數據。生成混合校正數據方法為F = 0.2F+ 0.8F。F 為校正后的數據,作為下一時間步預測的輸入;F為上一時間步預測結果;F為對應時刻已知真實值。圖9中藍色曲線為采用混合數據進行校正的預測誤差變化過程,可以看出,校正時間步誤差已經不會突然增大,而且在一定范圍內始終保持較高的準確度。
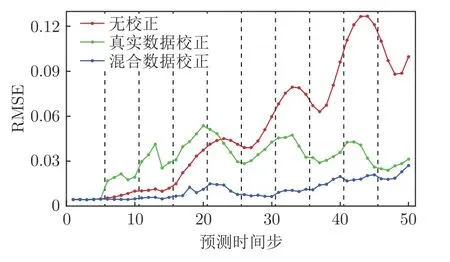
圖9 不同校正方法持續預測結果均方根誤差對比Fig.9 Comparison of the RMSE between different correction methods
圖10 為采用混合數據進行校正、順流方向速度場在經過不同時間步預測后的高分辨率預測結果與真實值之間的對比。可以看出,與圖8中相同時間步相比,整場預測誤差已經降低了許多,基本上能與第一步完全使用真實數據進行預測的誤差保持在同一水平,證明該種預測和校正方法是有效的,可實現低分辨率流場的時間和空間高分辨率重構。選擇坐標為(1.5,0)的點作為特征點,對比該點不同時刻的重構結果與真實值,如圖11 所示。從圖中可以看出,在一段時間內重構結果與真實值吻合較好,展示出了較高的預測精度。
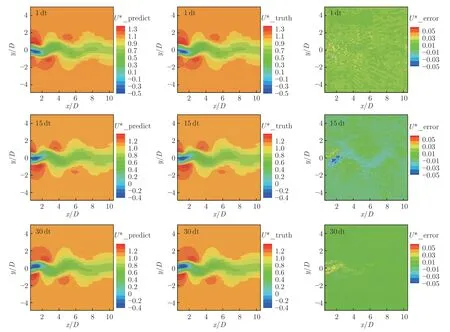
圖10 使用混合數據校正時不同時間步流場重構結果與數值模擬結果對比Fig.10 Comparison of flow field reconstruction results corrected with proportional mixing data and numerical simulation results at different time steps

圖11 特定位置流場變量演化對比Fig.11 Comparison of evolution of flow field variables at specific locations
3 結 論
實現了基于深度神經網絡的流場時間和空間高分辨率重構,重構后的流場數據空間密度為原始數據的51 倍,時間維度密度為原始數據的5 倍。
1)在對流場進行空間高分辨率重構時,卷積神經網絡能夠忽略輸入數據中存在的一些噪聲,得到流場的深度結構特征。
2)使用深度神經網絡對流場在時間維度上進行持續預測會產生誤差積累,在預測過程中添加已知準確信息能夠對預測過程產生校正作用,使預測誤差保持在一定范圍內。
3)在深度神經網絡預測過程中添加校正信息時,添加的校正信息既需具有準確性又需與預測趨勢保持一致性。
基于深度神經網絡的流場時空重構技術具有成本低和適用性廣的優勢,很有希望應用于更真實的實驗;該技術也存在許多值得研究的問題,如模擬數據與實驗數據的匹配性研究、深度神經網絡結構參數對預測結果的影響以及更有效的校正方式等。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57