機(jī)器學(xué)習(xí)數(shù)據(jù)融合方法在火箭子級(jí)柵格舵氣動(dòng)特性建模應(yīng)用中的比較研究
2022-07-14 02:16:56許晨舟杜濤韓忠華昝博文牟宇張津澤
實(shí)驗(yàn)流體力學(xué) 2022年3期
關(guān)鍵詞:模型
許晨舟,杜濤,韓忠華,,昝博文,牟宇,張津澤
1.西北工業(yè)大學(xué) 航空學(xué)院,西安 710072
2.翼型、葉柵空氣動(dòng)力學(xué)國(guó)家級(jí)重點(diǎn)實(shí)驗(yàn)室,西安 710072
3.北京宇航系統(tǒng)工程研究所,北京 100076
0 引 言
飛行器氣動(dòng)設(shè)計(jì)的核心工作之一是提供準(zhǔn)確、完備的氣動(dòng)特性數(shù)據(jù),其中最為重要的是凍結(jié)外形氣動(dòng)特性數(shù)據(jù),國(guó)外一般稱為“設(shè)計(jì)氣動(dòng)數(shù)據(jù)庫(kù)”。然而,對(duì)于流動(dòng)條件變化復(fù)雜的高超聲速飛行器,建立設(shè)計(jì)氣動(dòng)數(shù)據(jù)庫(kù)通常需要開展規(guī)模龐大和復(fù)雜的風(fēng)洞試驗(yàn)和CFD 計(jì)算,導(dǎo)致氣動(dòng)研制經(jīng)費(fèi)和進(jìn)度難以控制。因此工程應(yīng)用迫切需要發(fā)展新的方法降低氣動(dòng)數(shù)據(jù)庫(kù)建立成本。
近年來(lái),隨著數(shù)字化飛行器設(shè)計(jì)技術(shù)的發(fā)展,研究人員在人工智能技術(shù)與空氣動(dòng)力學(xué)結(jié)合方面開展了諸多有益的嘗試與探索。其中具有代表性的機(jī)器學(xué)習(xí)方法已經(jīng)成為最主流的人工智能實(shí)現(xiàn)方式,被廣泛應(yīng)用于飛行器多源氣動(dòng)數(shù)據(jù)融合與建模。機(jī)器學(xué)習(xí)方法可以快速預(yù)測(cè)不同工況下飛行器的氣動(dòng)特性,對(duì)建立完備的氣動(dòng)數(shù)據(jù)庫(kù)、降低飛行器設(shè)計(jì)成本以及提升飛行器綜合性能具有重要意義。
變可信度融合模型是機(jī)器學(xué)習(xí)方法中的代表性方法。它是一種針對(duì)小樣本數(shù)據(jù)的監(jiān)督式機(jī)器學(xué)習(xí)方法,其核心思想是先利用大量的低可信度(成本低、精度差)數(shù)據(jù)去近似氣動(dòng)特性的變化趨勢(shì),再融合高可信度(成本高、精度好)數(shù)據(jù)進(jìn)行修正,實(shí)現(xiàn)對(duì)未知狀態(tài)下氣動(dòng)特性的高精度預(yù)測(cè)。目前常用的變可信度融合模型大致可以分為以下4 類:
1)基于標(biāo)度函數(shù)的修正模型
基于標(biāo)度函數(shù)的修正模型是在低可信度模型基礎(chǔ)上,以相加、相乘或兩者混合的方式引入標(biāo)度函數(shù),從而構(gòu)建高可信度模型的近似模型。Haftka和Chang 等最早提出了乘法標(biāo)度函數(shù)的修正方法,通過(guò)縮放比例系數(shù)可使低可信度模型在局部近似于高可信度分析的結(jié)果。Alexandrov 等將其與置信域法結(jié)合,提出了一階加法和乘法標(biāo)度函數(shù),并應(yīng)用于翼型和機(jī)翼的優(yōu)化設(shè)計(jì)之中,顯著降低了計(jì)算成本。舒樂(lè)時(shí)等和Park 等建立了更符合全局模型變化趨勢(shì)的差異函數(shù),提高了變可信度模型的預(yù)測(cè)精度。Wang提出了一種基于最小二乘法的加法標(biāo)度函數(shù)構(gòu)造方法,提高了模型的泛化能力。杜濤等提出了一種針對(duì)變可信度模型的自適應(yīng)預(yù)處理技術(shù),解決了加法標(biāo)度函數(shù)修正模型在原始數(shù)據(jù)絕對(duì)值較小情況下出現(xiàn)數(shù)據(jù)失真的問(wèn)題。韓忠華等改善了混合標(biāo)度函數(shù)修正方法,并引入了梯度等信息,進(jìn)一步提高了模型的預(yù)測(cè)精度。
2)空間映射模型
該方法最早由Bandler 在1994年提出,Bandler建立了高、低設(shè)計(jì)空間的映射關(guān)系,使低可信度函數(shù)的局部特性能夠逼近高可信度函數(shù)。而后Robinson等提出了一種改進(jìn)的空間映射方法,并應(yīng)用于撲翼的氣動(dòng)建模與優(yōu)化中。Jonsson 等也將此方法應(yīng)用于跨聲速機(jī)翼的氣動(dòng)優(yōu)化設(shè)計(jì)中。空間映射模型最主要的特點(diǎn)是允許高、低可信度模型的設(shè)計(jì)空間維數(shù)不一致,并且適用于高可信度樣本較少的高維建模問(wèn)題。
3)Co-Kriging 類模型
Co-Kriging 是在Kriging 模型基礎(chǔ)上發(fā)展起來(lái)的一類針對(duì)多可信度數(shù)據(jù)的高斯回歸模型,被認(rèn)為是一種淺層機(jī)器學(xué)習(xí)方法。其基于貝葉斯理論,通過(guò)建立自回歸模型將多種精度的數(shù)據(jù)進(jìn)行融合,利用交叉協(xié)方差來(lái)衡量不同精度數(shù)據(jù)間的相關(guān)性。Kennedy 和O’Hagan首次將其應(yīng)用于工程科學(xué)領(lǐng)域,提出了經(jīng)典的KOH 模型。之后,該模型的算法理論被不斷改進(jìn),包括采用多項(xiàng)式縮放系數(shù)、引入更多不同可信度層數(shù)據(jù)、建模樣本非嵌套化等。韓忠華和 Zimmermann 等提出了一種能夠避免復(fù)雜交叉協(xié)方差計(jì)算的Co-Kriging 模型。此外,韓忠華等還提出了一種通用性更強(qiáng)、建模更加簡(jiǎn)潔的分層Kriging 模型(Hierarchical kriging,HK)。該模型的基本思想是以大量的低可信度數(shù)據(jù)建立全局趨勢(shì)模型,通過(guò)少量的高可信度樣本進(jìn)行修正,最終建立起高精度的預(yù)測(cè)模型。HK 方法的后續(xù)改進(jìn)研究可以參閱文獻(xiàn)[6]和[8]。
4)多可信度神經(jīng)網(wǎng)絡(luò)模型
多可信度神經(jīng)網(wǎng)絡(luò)模型(Multi-Fidelity Neural Network,MFNN)采用最新發(fā)展的深度學(xué)習(xí)技術(shù),先根據(jù)低可信度樣本建立神經(jīng)網(wǎng)絡(luò)模型,再將低可信度模型的預(yù)測(cè)值和高可信度樣本同時(shí)作為高可信度神經(jīng)網(wǎng)絡(luò)的輸入,最后根據(jù)輸出的預(yù)測(cè)值與高可信度樣本標(biāo)簽值之間的差異來(lái)構(gòu)建損失函數(shù),迭代訓(xùn)練模型參數(shù)。Meng 等在MFNN 模型的基礎(chǔ)上提出了多可信度貝葉斯神經(jīng)網(wǎng)絡(luò),該方法可提供模型預(yù)測(cè)值的均方誤差。何磊等將MFNN 網(wǎng)絡(luò)應(yīng)用于亞聲速翼型的氣動(dòng)特性建模。張?chǎng)螏浀葎t將MFNN 網(wǎng)絡(luò)應(yīng)用于翼型與翼身組合體的氣動(dòng)優(yōu)化設(shè)計(jì)。
雖然變可信度融合模型理論與算法在近十年已取得了長(zhǎng)足的進(jìn)步,但現(xiàn)有方法的泛化能力仍明顯不足,大多數(shù)模型還停留在實(shí)驗(yàn)室研究階段,缺乏工程研制中復(fù)雜應(yīng)用場(chǎng)景的適應(yīng)性研究。
2019年,在我國(guó)首次開展的在役火箭子級(jí)落區(qū)控制項(xiàng)目中,由于飛行操態(tài)較多,跨越馬赫數(shù)范圍廣,氣動(dòng)研制工作面臨經(jīng)費(fèi)和進(jìn)度的雙重壓力。本文作者所在團(tuán)隊(duì)首次嘗試引入變可信度融合模型技術(shù),在解決了4 項(xiàng)關(guān)鍵算法和技術(shù)問(wèn)題、提升了模型在復(fù)雜工程問(wèn)題中的適應(yīng)性,利用加法標(biāo)度函數(shù)修正模型和HK 模型學(xué)習(xí)了項(xiàng)目部分風(fēng)洞試驗(yàn)及CFD計(jì)算結(jié)果后,預(yù)測(cè)了全部工況的氣動(dòng)特性,按時(shí)建立了飛行氣動(dòng)數(shù)據(jù)庫(kù),并大幅降低了風(fēng)洞試驗(yàn)和數(shù)值仿真的需求。2019年7月,飛行搭載試驗(yàn)取得成功,預(yù)測(cè)結(jié)果的正確性獲得了驗(yàn)證。
本文是上述研究工作的繼續(xù)。在應(yīng)用中作者發(fā)現(xiàn)相關(guān)函數(shù)和模型的選擇對(duì)預(yù)測(cè)結(jié)果的正確性和質(zhì)量有較大影響,因此,本文將深入研究影響機(jī)理,進(jìn)一步發(fā)掘變可信度融合模型在工程復(fù)雜場(chǎng)景中應(yīng)用的魯棒性和適應(yīng)性。除文獻(xiàn)[2]中的加法標(biāo)度函數(shù)修正模型和HK 模型外,本文還將額外對(duì)比2 種變可信度融合模型—Co-Kriging 模型和MFNN 模型。這4 種變可信度融合模型幾乎代表了當(dāng)前主流的氣動(dòng)融合建模思路。通過(guò)對(duì)建模結(jié)果的對(duì)比分析,討論不同相關(guān)函數(shù)和模型的工程適應(yīng)性,并給出變可信度融合模型的使用建議。
1 變可信度模型理論與算法
1.1 基本假設(shè)
對(duì)于一個(gè)維的建模問(wèn)題,假設(shè)存在通過(guò)不同來(lái)源或不同精度的分析模型得到的高、低可信度樣本數(shù)據(jù)集:

以及對(duì)應(yīng)的響應(yīng)值:

其中,下標(biāo)“1”表示高可信度,“2”表示低可信度;和分別為高、低可信度樣本點(diǎn)個(gè)數(shù), R為實(shí)數(shù)集。
變可信度模型構(gòu)建中所需要解決的核心問(wèn)題是如何有效地融合高、低精度分析模型的數(shù)據(jù),使預(yù)測(cè)結(jié)果能更逼近真實(shí)的高精度結(jié)果。下面將介紹4 種常見的變可信度融合模型理論。
1.2 加法標(biāo)度函數(shù)修正模型
基于加法標(biāo)度函數(shù)修正的變可信度融合模型(Additive Scaling Function Based Multi-fidelity Surrogate Model,AS-MFS)是一種以低可信度模型為基礎(chǔ)、通過(guò)加法標(biāo)度函數(shù)的方式引入高可信度數(shù)據(jù)輔助構(gòu)建高可信度分析模型的近似模型,具體的公式推導(dǎo)可參見文獻(xiàn)[8]。在AS-MFS 中,標(biāo)度函數(shù)()定義為高可信度樣本點(diǎn)處高、低可信度分析模型輸出響應(yīng)間的差值:



由于概念直觀且模型簡(jiǎn)潔,AS-MFS 已成為標(biāo)度函數(shù)修正模型中最常用的方法,被廣泛應(yīng)用于工程問(wèn)題的建模和設(shè)計(jì)過(guò)程中。
1.3 Co-Kriging 模型
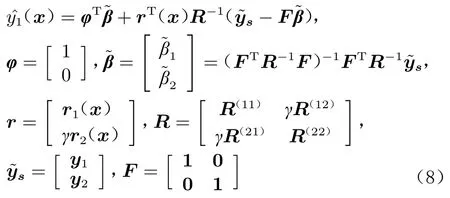
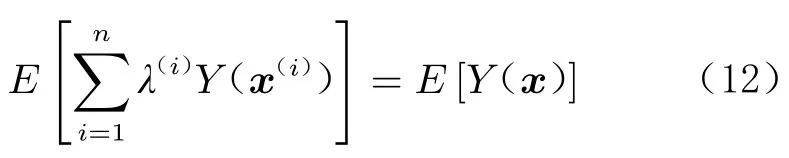
本文選用的Co-Kriging 模型來(lái)自文獻(xiàn)[29]。假設(shè)模型預(yù)估值為已知樣本響應(yīng)值的線性加權(quán):



為了降低模型的復(fù)雜程度,文獻(xiàn)[29]假設(shè)高、低可信度數(shù)據(jù)具有相同的過(guò)程方差。同時(shí)為了描述不同可信度數(shù)據(jù)之間的相關(guān)性,額外引入了一個(gè)模型超參數(shù)[0,1],于是通過(guò)拉格朗日乘子法可將公式(6)轉(zhuǎn)為矩陣形式:
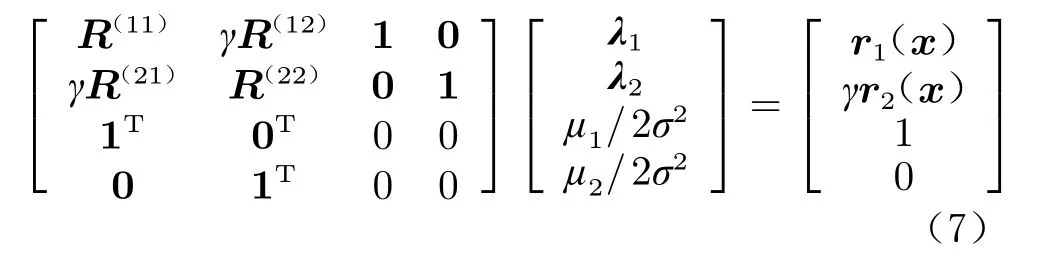
經(jīng)過(guò)推導(dǎo)可得,Co-Kriging 模型的預(yù)估值表達(dá)式為:
1.4 分層Kriging 模型
韓忠華等于2012年提出了分層Kriging 模型,它是對(duì)傳統(tǒng)Kriging 模型理論的進(jìn)一步發(fā)展。首先,針對(duì)低可信度數(shù)據(jù)集建立Kriging 模型:

其次,假設(shè)在高可信度樣本點(diǎn)處存在靜態(tài)隨機(jī)過(guò)程:

其中,Z(x)表示均值為0、差為的靜態(tài)隨機(jī)過(guò)程。這里低可信度Kriging 模型的預(yù)估值?()與常數(shù)縮放因子的乘積代替了原先的常數(shù)回歸項(xiàng),成為高可信度模型的全局趨勢(shì)模型。與Kriging 模型類似,可推得HK 模型的均方誤差為:

并滿足如下無(wú)偏估計(jì)的條件:
最終,HK 模型的預(yù)估值可表示為:

1.5 多可信度神經(jīng)網(wǎng)絡(luò)模型
除了基于貝葉斯理論的變可信度模型,近年來(lái)新發(fā)展了一種基于深度學(xué)習(xí)的多可信度神經(jīng)網(wǎng)絡(luò)模型(MFNN),其模型結(jié)構(gòu)如圖1所示,具體推導(dǎo)過(guò)程可以參閱文獻(xiàn)[31]。
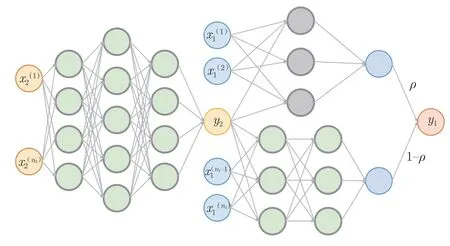
圖1 多可信度神經(jīng)網(wǎng)絡(luò)模型結(jié)構(gòu)示意圖Fig.1 Schematic of multi-fidelity neural network
假設(shè)高、低可信度數(shù)據(jù)之間的關(guān)系可以表示為:

其中,()表示數(shù)據(jù)從低可信度層到高可信度層的映射關(guān)系。一般認(rèn)為在高、低可信度數(shù)據(jù)層均存在線性和非線性相關(guān)性,于是映射函數(shù)()可拆為兩部分:

為了描述高、低可信度數(shù)據(jù)間線性和非線性相關(guān)性的程度,引入超參數(shù)縮放因子,于是MFNN 模型的預(yù)估值表達(dá)式為:

2 在柵格舵氣動(dòng)建模與預(yù)測(cè)上的應(yīng)用和比較
2.1 模型訓(xùn)練樣本集
預(yù)測(cè)對(duì)象為在役火箭的一子級(jí),如圖2所示,其級(jí)間段設(shè)計(jì)了4 片對(duì)稱分布的柵格舵,對(duì)再入過(guò)程的俯仰、偏航和滾轉(zhuǎn)通道進(jìn)行氣動(dòng)操縱。本文將以俯仰通道氣動(dòng)特性為研究對(duì)象,輸入變量為馬赫數(shù)、攻角()和俯仰舵偏角。

圖2 火箭一子級(jí)落區(qū)控制的柵格舵方案示意圖[2]Fig.2 Illustration of grid fins in the rocket first stage landing area control project[2]
項(xiàng)目以風(fēng)洞試驗(yàn)(圖3)為主,輔以少量CFD 計(jì)算(圖4)。由于進(jìn)度和經(jīng)費(fèi)的原因,風(fēng)洞試驗(yàn)和CFD 計(jì)算的結(jié)果并不充分。亞聲速和跨聲速條件的試驗(yàn)成本低、進(jìn)度快,均開展了試驗(yàn);馬赫數(shù)大于4 的狀態(tài)未開展試驗(yàn),最終僅開展了所需工況的54%,如表1所示。理論上,風(fēng)洞試驗(yàn)狀態(tài)比CFD 計(jì)算更加接近飛行器表面真實(shí)的流動(dòng)狀態(tài),因此,本文將風(fēng)洞試驗(yàn)數(shù)據(jù)視為高可信度數(shù)據(jù),而CFD 計(jì)算結(jié)果是低可信度輔助數(shù)據(jù)。

圖3 火箭一子級(jí)帶柵格舵模型在風(fēng)洞中試驗(yàn)情況[2]Fig.3 Experimental model of rocket first stage with grid fins in the wind tunnel test[2]

圖4 火箭一子級(jí)帶柵格舵外形數(shù)值仿真的計(jì)算網(wǎng)格[2]Fig.4 Computational grids of CFD simulation for rocket first stage with grid fins[2]

表1 俯仰特性風(fēng)洞試驗(yàn)情況[2]Table 1 Fundamental state for wind tunnel experiment on pitching moment characteristics[2]
亞聲速段時(shí),火箭一子級(jí)帶柵格舵外形的俯仰力矩在0°攻角附近為靜穩(wěn)定配平點(diǎn),而超聲速段變?yōu)椴环€(wěn)定配平點(diǎn)(圖5),跨聲速段容易出現(xiàn)顯著的壅塞現(xiàn)象。柵格舵的俯仰力矩表現(xiàn)出遠(yuǎn)比軸向力和法向力復(fù)雜的變化特性。這種特性能夠代表工程應(yīng)用的復(fù)雜場(chǎng)景,因此本文將俯仰力矩特性的氣動(dòng)建模與預(yù)測(cè)作為主要研究對(duì)象。
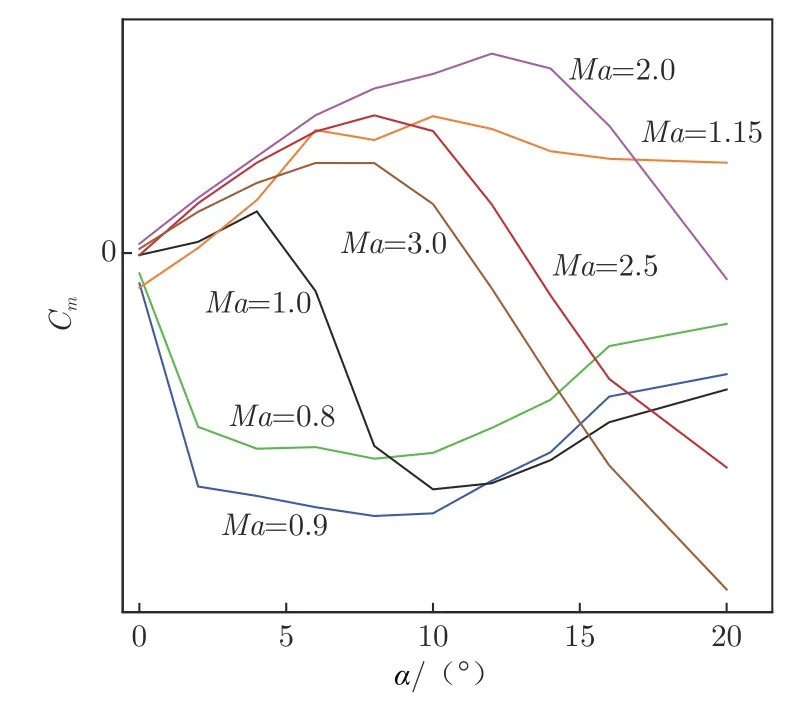
圖5 火箭一子級(jí)帶柵格舵外形跨聲速段和超聲速段俯仰力矩特性Fig.5 Pitching moment characteristics of rocket first stage with grid fins in the transonic and supersonic regimes
從氣動(dòng)數(shù)據(jù)集中篩選出不同舵偏角、馬赫數(shù)、攻角(輸入數(shù)據(jù))與俯仰力矩系數(shù)(輸出數(shù)據(jù)),得到不同舵偏角下的310 組風(fēng)洞試驗(yàn)數(shù)據(jù)和96 組CFD 計(jì)算數(shù)據(jù),其空間分布情況如圖6所示,4 個(gè)舵偏角從上往下依次為–20°、–10°、0°和10°。從圖中可以看出:高可信度風(fēng)洞試驗(yàn)數(shù)據(jù)(綠色球體)主要集中在跨聲速段,缺少高超聲速段數(shù)據(jù)(馬赫數(shù)4 以上);而CFD 計(jì)算數(shù)據(jù)(紅色方塊)覆蓋了全馬赫數(shù)工況,但缺少大攻角下(攻角15°以上)俯仰力矩?cái)?shù)據(jù)。

圖6 柵格舵俯仰力矩系數(shù)數(shù)據(jù)集空間分布情況Fig.6 Pitching moment data set of rocket first stage with grid fins
2.2 模型訓(xùn)練的關(guān)鍵問(wèn)題
本文采用4 種變可信度融合模型對(duì)俯仰力矩系數(shù)進(jìn)行建模與預(yù)測(cè)。下面先對(duì)模型訓(xùn)練過(guò)程中出現(xiàn)的一些關(guān)鍵問(wèn)題進(jìn)行分析和討論。
除了MFNN 模型,其余3 種變可信度融合模型均基于高斯過(guò)程回歸理論。高斯過(guò)程回歸—本文特指Kriging 模型—是一種使用高斯過(guò)程先驗(yàn)對(duì)數(shù)據(jù)進(jìn)行插值分析的模型。它通常包含不超過(guò)兩層的非線性特征變換,因而被認(rèn)為是一種淺層的機(jī)器學(xué)習(xí)模型。文獻(xiàn)[2]中,我們發(fā)現(xiàn)相關(guān)函數(shù)R 和模型超參數(shù)訓(xùn)練對(duì)Kriging 模型的預(yù)測(cè)效果影響很大。相關(guān)函數(shù)又稱為“核函數(shù)”,是一類僅與樣本點(diǎn)空間距離相關(guān)的光滑函數(shù),滿足距離為0 時(shí)等于1、距離無(wú)窮大時(shí)等于0,且相關(guān)性隨著距離的增大而減小。對(duì)于一個(gè)維的建模問(wèn)題,相關(guān)函數(shù)一般具有如下的形式:

其中,、x為設(shè)計(jì)空間中任意兩個(gè)不同位置,為待定的模型超參數(shù)。一般來(lái)說(shuō),帶有的相關(guān)函數(shù)可以更好地反映不同變量在該維空間上的變化尺度,通過(guò)訓(xùn)練可以提高Kriging 模型對(duì)非線性函數(shù)的擬合能力。另外,還有一類不帶的相關(guān)函數(shù),如薄板樣條函數(shù),它們往往對(duì)非線性函數(shù)的擬合較差,而對(duì)線性函數(shù)的擬合較好。
目前常用的帶的相關(guān)函數(shù)包括三次樣條函數(shù)和高斯指數(shù)函數(shù)。本節(jié)將著重考察這兩種相關(guān)函數(shù)對(duì)預(yù)測(cè)效果的影響。
三次樣條函數(shù)的解析表達(dá)式為:

其中,ξ=θ|x-x|,=1,2,,。該函數(shù)二階可導(dǎo),在光滑性和魯棒性方面能取得很好的折中。
高斯指數(shù)函數(shù)的解析表達(dá)式為:

其中,p為相關(guān)函數(shù)光滑程度的各向異性參數(shù)。p=2時(shí),相關(guān)函數(shù)無(wú)窮階次可導(dǎo);p <2時(shí),相關(guān)函數(shù)一階可導(dǎo)。
圖7、8 分別為超參數(shù)取不同值時(shí)三次樣條函數(shù)和高斯指數(shù)函數(shù)的變化情況。從圖中可以看到,隨著的增大,相關(guān)函數(shù)曲線逐漸變“陡峭”,這意味著較大的會(huì)縮小作用范圍。取值相同時(shí),對(duì)比三次樣條函數(shù)和高斯指數(shù)函數(shù)(p = 2),可以發(fā)現(xiàn):三次樣條函數(shù)隨樣本空間距離的變化更劇烈,并且當(dāng)樣本空間距離大到一定程度時(shí),二者的相關(guān)性消失。文獻(xiàn)[35]將這類樣本局部性影響較大而全局性影響較小的相關(guān)函數(shù)稱為“緊支撐性函數(shù)”。圖9展示了= 1 時(shí)高斯指數(shù)函數(shù)取隨參數(shù)p 的變化情況。可以看到,隨著參數(shù)p 的增大,相關(guān)函數(shù)在樣本距離較小的情況下過(guò)渡得更為平緩。為了保持這種光滑的過(guò)渡性,本文限制高斯指數(shù)函數(shù)參數(shù)p 的取值范圍為[1.5,2],且參數(shù)p 與超參數(shù)都可以通過(guò)最大似然估計(jì)的方法優(yōu)化得到。

圖7 不同超參數(shù)下的三次樣條函數(shù)變化Fig.7 Influence of θ on the cubic correlation function

圖8 不同超參數(shù)下的高斯指數(shù)函數(shù)變化(p = 2)Fig.8 Influence of θ on the Gauss correlation function with p = 2
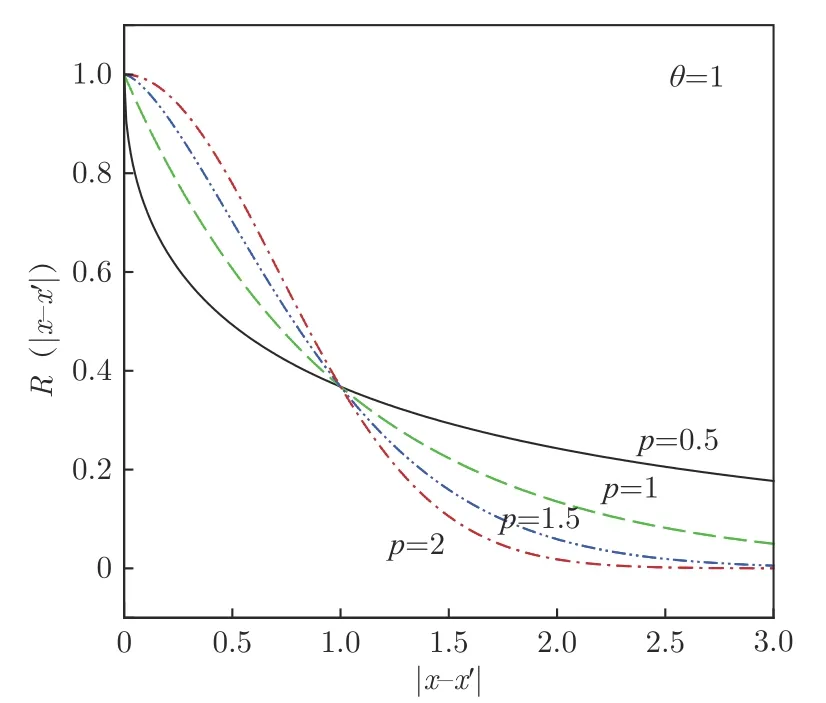
圖9 不同參數(shù)p 時(shí)的高斯指數(shù)函數(shù)變化(θ = 1)Fig.9 Influence of index p on the Gauss correlation function with θ = 1
上文通過(guò)理論分析解釋了兩種相關(guān)函數(shù)的差異性,下面將其應(yīng)用于柵格舵的俯仰力矩參數(shù)建模問(wèn)題,考察不同相關(guān)函數(shù)對(duì)預(yù)測(cè)效果的影響情況。本文以舵偏角=0°時(shí)的俯仰力矩系數(shù)建模為例。需要說(shuō)明的是,當(dāng)俯仰舵無(wú)偏轉(zhuǎn)時(shí),共有100 組風(fēng)洞試驗(yàn)數(shù)據(jù)和24 組CFD 計(jì)算數(shù)據(jù);模型的第一維輸入是馬赫數(shù),第二維輸入是攻角。
為在同一標(biāo)準(zhǔn)下進(jìn)行對(duì)比,首先將兩種相關(guān)函數(shù)的超參數(shù)優(yōu)化范圍均限制在[0.001,1.0]。圖10 為HK 模型采用不同相關(guān)函數(shù)的預(yù)測(cè)結(jié)果對(duì)比。從圖中可以看到,采用緊支撐性較強(qiáng)的三次樣條函數(shù)時(shí),預(yù)測(cè)曲面變得不光滑,在離樣本點(diǎn)較遠(yuǎn)的區(qū)域出現(xiàn)波浪型“隆起”現(xiàn)象;而采用高斯指數(shù)函數(shù)時(shí),整個(gè)預(yù)測(cè)曲面在設(shè)計(jì)空間內(nèi)的變化都較為光滑。
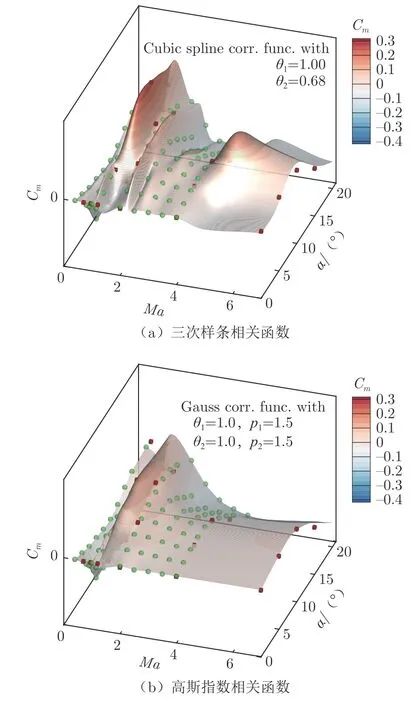
圖10 基于不同相關(guān)函數(shù)的HK 模型對(duì)俯仰力矩系數(shù)建模結(jié)果對(duì)比(超參數(shù)優(yōu)化范圍受限制)Fig.10 Comparison of predicted pitching moment coefficients via HK model based on different correlation functions (with optimization boundaries for hyperparameters)
然后,解除對(duì)超參數(shù)優(yōu)化范圍的限制,基于最大似然估計(jì)理論對(duì)超參數(shù)進(jìn)行徹底優(yōu)化,得到優(yōu)化后的超參數(shù)及俯仰力矩系數(shù)預(yù)測(cè)結(jié)果,如圖11 所示。從圖中可以看到:采用三次樣條作為相關(guān)函數(shù)時(shí),優(yōu)化后超參數(shù)的第一維數(shù)值較大,反映在預(yù)測(cè)曲面上,俯仰力矩系數(shù)預(yù)測(cè)值沿馬赫數(shù)方向出現(xiàn)了過(guò)擬合現(xiàn)象;而采用高斯指數(shù)函數(shù)時(shí),預(yù)測(cè)模型未出現(xiàn)明顯的過(guò)擬合現(xiàn)象。造成這一現(xiàn)象的原因是:三次樣條函數(shù)的緊支撐性使得其在較大時(shí)樣本的影響域很小(圖7),一旦預(yù)測(cè)點(diǎn)稍微偏離樣本點(diǎn),就無(wú)法獲取樣本響應(yīng)值的相關(guān)信息,預(yù)測(cè)值將迅速靠近模型自身的常數(shù)回歸項(xiàng)。在HK 模型的外插區(qū)域,由于缺少高可信度風(fēng)洞數(shù)據(jù),采用高斯指數(shù)函數(shù)的模型預(yù)測(cè)曲面出現(xiàn)了小范圍凹坑與鼓包。根據(jù)馬赫數(shù)無(wú)關(guān)性原理,該現(xiàn)象不符合實(shí)際的物理規(guī)律。這也從側(cè)面反映出:并不是模型的超參數(shù)優(yōu)化得越徹底,預(yù)測(cè)效果就會(huì)越好;而是需要結(jié)合建模問(wèn)題本身,給出合理的優(yōu)化空間。

圖11 基于不同相關(guān)函數(shù)的HK 模型對(duì)俯仰力矩系數(shù)建模結(jié)果對(duì)比(超參數(shù)優(yōu)化范圍不作限制)Fig.11 Comparison of predicted pitching moment coefficients via HK model based on different correlation functions (with no optimization boundaries for hyperparameters)
本文將超參數(shù)的優(yōu)化范圍限制在[0.001,1.0],再對(duì)比不同變可信度高斯回歸模型采用這兩種相關(guān)函數(shù)的俯仰力矩系數(shù)預(yù)測(cè)曲線,截取了攻角為10°的結(jié)果,如圖12 所示。從圖中可以看到:采用三次樣條作為相關(guān)函數(shù)時(shí),3 種變可信度模型的預(yù)測(cè)曲線均出現(xiàn)了不同程度的“振蕩”現(xiàn)象;而采用高斯指數(shù)函數(shù)時(shí),模型預(yù)測(cè)曲線變化較為光滑,更符合物理規(guī)律。圖12 充分顯示了相關(guān)函數(shù)對(duì)預(yù)測(cè)結(jié)果的重要性。在后續(xù)的分析中,選用高斯指數(shù)函數(shù)作為AS-MFS 模型、 Co-Kriging 模型和HK 模型的相關(guān)函數(shù)。
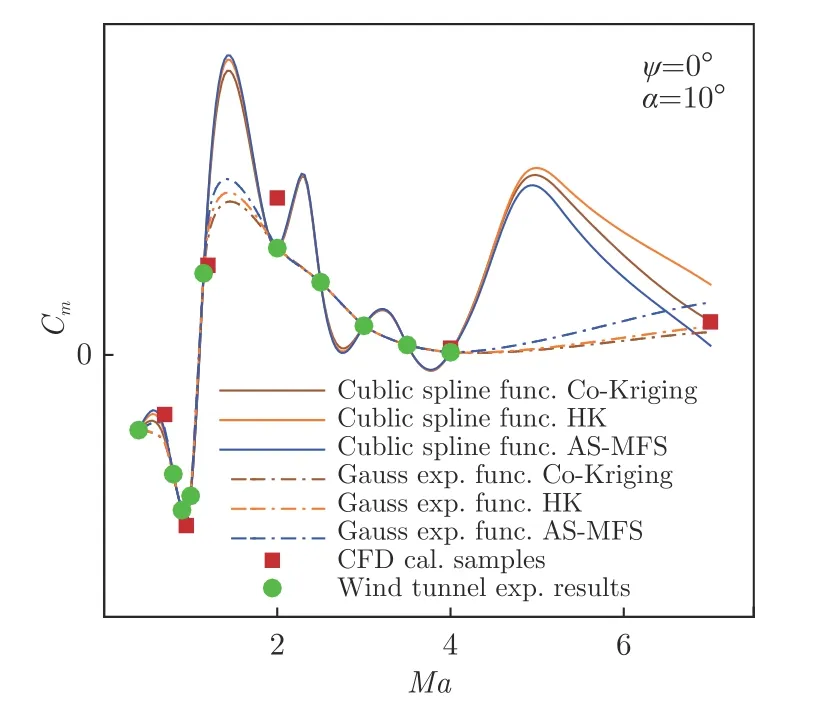
圖12 采用兩種相關(guān)函數(shù)的不同變可信度模型對(duì)俯仰力矩系數(shù)建模的結(jié)果對(duì)比Fig.12 Comparison of predicted pitching moment coefficients via different variable-fidelity model based on the two correlation functions
如何評(píng)估最終建立的變可信度融合模型的預(yù)測(cè)精度,是研究人員最關(guān)心、也是其在工程問(wèn)題中取得成功應(yīng)用的關(guān)鍵性問(wèn)題之一。本文沿用文獻(xiàn)[2]提出的檢驗(yàn)方法:交叉驗(yàn)證與物理規(guī)律檢驗(yàn)相結(jié)合。交叉驗(yàn)證,即屏蔽一小部分試驗(yàn)數(shù)據(jù),將其設(shè)定為未知,然后與模型預(yù)測(cè)進(jìn)行比較。氣動(dòng)特性數(shù)據(jù)并非毫無(wú)規(guī)律可言,而是需要滿足客觀存在的物理規(guī)律,例如Oswatitsch 高超馬赫數(shù)無(wú)關(guān)性原則。這些規(guī)律可以幫助研究人員對(duì)氣動(dòng)模型進(jìn)一步確認(rèn)預(yù)測(cè)結(jié)果。
鑒于項(xiàng)目數(shù)據(jù)空間分布的特殊性,高可信度風(fēng)洞試驗(yàn)結(jié)果僅分布在馬赫數(shù)4 以下的狀態(tài)(圖6)。本文將馬赫數(shù)區(qū)間分成兩段,分別采用交叉驗(yàn)證和物理規(guī)律檢驗(yàn)的方法。具體而言:
1)對(duì)馬赫數(shù)小于4 的內(nèi)插區(qū)域,由于存在高可信度樣本數(shù)據(jù),因此隨機(jī)屏蔽一小部分風(fēng)洞試驗(yàn)數(shù)據(jù)點(diǎn)作為測(cè)試集,計(jì)算相關(guān)系數(shù)(r)、相對(duì)均方根誤差(RRMSE)和相對(duì)最大絕對(duì)誤差(RMAE) 3 個(gè)指標(biāo)來(lái)表征模型的預(yù)估精度。其中,r和RRMSE 用來(lái)表征模型的全局預(yù)測(cè)精度,且r越接近1、RRMSE越接近0,模型全局預(yù)測(cè)越精確;RMAE 用來(lái)表征模型的局部預(yù)測(cè)精度,且RMAE 越接近0,模型局部預(yù)測(cè)越精確。3 個(gè)指標(biāo)的計(jì)算公式如下:
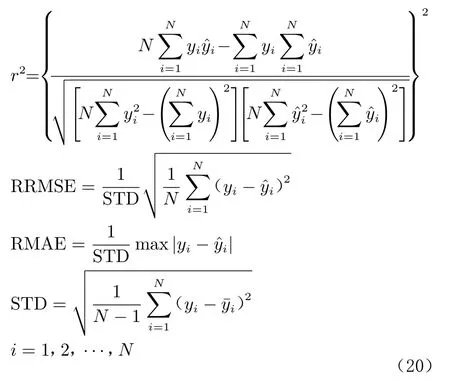
其中,N 為測(cè)試集中的樣本個(gè)數(shù)。需要說(shuō)明的是,N 的值不宜過(guò)大,否則會(huì)導(dǎo)致需要被屏蔽的高可信度風(fēng)洞試驗(yàn)數(shù)據(jù)過(guò)多,從而減少參與氣動(dòng)建模的高可信度樣本數(shù)據(jù),造成模型預(yù)測(cè)精度的損失。綜合考慮后,從310 組高可信度樣本里抽取了30 組樣本作為測(cè)試集。
2)對(duì)于馬赫數(shù)大于4 的外插區(qū)域,由于缺乏風(fēng)洞試驗(yàn)數(shù)據(jù),無(wú)法采用交叉驗(yàn)證方法進(jìn)行精度評(píng)估,因而采用物理規(guī)律進(jìn)行檢驗(yàn)。需要說(shuō)明的是,火箭一子級(jí)帶柵格舵外形的飛行搭載試驗(yàn)取得了成功,其在再入啟控的過(guò)程中經(jīng)歷了外插段的高馬赫數(shù)區(qū)間,也從側(cè)面間接說(shuō)明了采用變可信度融合模型進(jìn)行外插的正確性和有效性。后續(xù)研究工作中將發(fā)展對(duì)外插結(jié)果的直接驗(yàn)證方法。
2.3 模型的預(yù)測(cè)結(jié)果及對(duì)比
本節(jié)采用2.1 小節(jié)介紹的4 種變可信度融合模型分別對(duì)–20°、–10°、0°和10°舵偏角下柵格舵的俯仰力矩系數(shù)進(jìn)行建模。表2為各舵偏角下的樣本個(gè)數(shù)分布情況。

表2 不同舵偏角下樣本分布情況Table 2 Data sets for different elevator deflections of grid fins
圖13 為采用高斯指數(shù)相關(guān)函數(shù)的AS-MFS 模型、Co-Kriging 模型、HK 模型和MFNN 模型在馬赫數(shù)[0.4,4]區(qū)間內(nèi)對(duì)俯仰力矩系數(shù)的內(nèi)插結(jié)果對(duì)比。從圖中可以看到,AS-MFS 模型、Co-Kriging 模型和HK 模型的預(yù)測(cè)結(jié)果較為接近,均比較光滑,各舵偏角對(duì)應(yīng)的預(yù)測(cè)曲面近似平行且相互隔開,不存在交叉現(xiàn)象。MFNN 模型預(yù)測(cè)的俯仰力矩系數(shù)在跨聲速、大攻角區(qū)域有較高的隆起現(xiàn)象;在跨聲速區(qū),–20°和–10°舵偏角下的俯仰力矩系數(shù)有明顯的交叉現(xiàn)象。圖14 為馬赫數(shù)為3.5 時(shí)采用交叉驗(yàn)證方法檢驗(yàn)不同模型預(yù)測(cè)結(jié)果的對(duì)比情況。從圖中可以看到,Co-Kriging 模型和HK 模型的預(yù)測(cè)值與測(cè)試點(diǎn)吻合最好,且二者精度較為接近。AS-MFS 模型的預(yù)測(cè)精度稍弱于前兩種模型。由于AS-MFS、Co-Kriging 模型和HK 模型為插值模型,因此預(yù)測(cè)曲線均精確通過(guò)了訓(xùn)練樣本;而MFNN 的預(yù)測(cè)結(jié)果較差,且由于它是擬合模型,因此未精確通過(guò)訓(xùn)練樣本。此外,表3還展示了采用交叉驗(yàn)證方法計(jì)算的模型精度指標(biāo)對(duì)比情況。可以看到,在–20°、0°和10°舵偏角下,Co-Kriging 模型的3 項(xiàng)精度指標(biāo)均優(yōu)于其他3 種模型。在–10°舵偏角下,Co-Kriging 模型除RRMSE 指標(biāo)稍弱于HK 模型外,其他2 項(xiàng)精度指標(biāo)仍為最佳。這表明Co-Kriging 模型在柵格舵俯仰力矩系數(shù)的內(nèi)插預(yù)測(cè)上具備一定的精度優(yōu)勢(shì)。HK 模型的精度指標(biāo)僅次于Co-Kriging 模型,也表現(xiàn)出了較強(qiáng)的預(yù)測(cè)能力。在4 種模型中,MFNN 模型預(yù)測(cè)結(jié)果的3 項(xiàng)指標(biāo)均最差,俯仰力矩系數(shù)的預(yù)測(cè)誤差較大。

圖13 不同變可信度模型對(duì)俯仰力矩系數(shù)建模內(nèi)插結(jié)果對(duì)比Fig.13 Comparison of predicted pitching moment coefficients via different VFMs

表3 針對(duì)俯仰力矩系數(shù)建模不同模型精度指標(biāo)對(duì)比Table 3 Comparison of different accuracy indicators for pitching moment coefficients via different VFMs
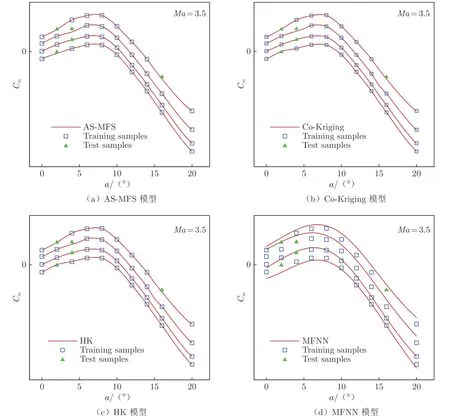
圖14 不同變可信度模型在馬赫數(shù)為3.5 時(shí)俯仰力矩系數(shù)預(yù)測(cè)結(jié)果的交叉驗(yàn)證對(duì)比Fig.14 Comparison of cross validation for predicted pitching moment coefficients via different VFMs at Mach 3.5
圖15 為4 種變可信度模型的外插預(yù)測(cè)結(jié)果對(duì)比,其中單獨(dú)截取了馬赫數(shù)為5 和7 下的俯仰力矩系數(shù)隨攻角變化結(jié)果進(jìn)行展示。從圖中可以看到,AS-MFS 模型和MFNN 模型的外插曲面最光滑,相比之下,Co-Kriging 模型和HK 模型外插曲面的光滑程度略微下降,存在少量凹坑。在馬赫數(shù)為5 的狀態(tài)下,AS-MFS 模型預(yù)測(cè)的0°和–10° 舵偏角下的俯仰力矩系數(shù)曲線在攻角14°附近有部分重疊,HK 模型的俯仰力矩系數(shù)曲線在2 個(gè)舵偏角下則存在交叉現(xiàn)象。Co-Kriging 模型和MFNN 模型不同舵偏角下的俯仰力矩系數(shù)曲線均無(wú)交叉現(xiàn)象。在馬赫數(shù)為7 的狀態(tài)下,HK 模型預(yù)測(cè)的2 個(gè)舵偏角下的俯仰力矩系數(shù)曲線仍然交叉,而其余3 種模型的預(yù)測(cè)結(jié)果較好,符合基本物理規(guī)律。需要注意的是,在0°攻角、0°舵偏角狀態(tài)下,俯仰力矩系數(shù)理論上過(guò)零點(diǎn),但AS-MFS 模型和Co-Kriging 模型預(yù)測(cè)值在馬赫數(shù)為5 和7 狀態(tài)下整組預(yù)測(cè)曲線均向下略微偏移,俯仰力矩系數(shù)未能過(guò)零點(diǎn);而HK 模型和MFNN 模型預(yù)測(cè)值在該狀態(tài)時(shí)經(jīng)過(guò)了零點(diǎn),符合客觀物理規(guī)律。考慮到HK 模型預(yù)測(cè)結(jié)果存在交叉現(xiàn)象,因此可以認(rèn)為MFNN 模型在俯仰力矩系數(shù)外插時(shí)的預(yù)測(cè)效果更好。


圖15 不同變可信度模型對(duì)俯仰力矩系數(shù)建模外插結(jié)果對(duì)比Fig.15 Comparison of predicted pitching moment coefficients via different VFMs
綜上所述,Co-Kriging 模型對(duì)柵格舵俯仰力矩系數(shù)的內(nèi)插有著較為良好的表現(xiàn),而采用MFNN模型可以在外插區(qū)域得到相對(duì)更加光滑、合理的預(yù)測(cè)結(jié)果。
3 結(jié) 論
本文將機(jī)器學(xué)習(xí)數(shù)據(jù)融合方法應(yīng)用于在役火箭一子級(jí)柵格舵落區(qū)控制項(xiàng)目的氣動(dòng)研制中,在開展部分工況風(fēng)洞試驗(yàn)的基礎(chǔ)上,結(jié)合少量的CFD 計(jì)算結(jié)果,預(yù)測(cè)獲得了設(shè)計(jì)所需的完整氣動(dòng)特性數(shù)據(jù)。通過(guò)對(duì)比4 種變可信度融合模型對(duì)柵格舵俯仰力矩氣動(dòng)特性的預(yù)測(cè)結(jié)果,得出結(jié)論如下:
1)針對(duì)柵格舵氣動(dòng)建模等全局預(yù)測(cè)問(wèn)題,選用高斯指數(shù)函數(shù)作為高斯過(guò)程回歸類機(jī)器學(xué)習(xí)模型的核函數(shù),可以獲得更光滑、魯棒性更好的預(yù)測(cè)結(jié)果;合理的超參數(shù)優(yōu)化范圍可以進(jìn)一步提高模型的預(yù)測(cè)精度。
2)對(duì)于柵格舵俯仰力矩系數(shù)的內(nèi)插,Co-Kriging模型可以獲得相對(duì)較好的預(yù)測(cè)結(jié)果,模型的泛化能力更強(qiáng)。
3)HK 模型在俯仰力矩系數(shù)內(nèi)插時(shí)表現(xiàn)出較強(qiáng)的預(yù)測(cè)能力,但在外插時(shí)效果不理想,不同舵偏角下存在不合理的交叉現(xiàn)象。
4)采用MFNN 模型在高馬赫數(shù)下對(duì)俯仰力矩系數(shù)外插時(shí)可以獲得更為光滑、合理的預(yù)測(cè)結(jié)果,但在內(nèi)插時(shí)的預(yù)測(cè)誤差較大。
5)總體而言,內(nèi)插的預(yù)測(cè)可信度更高,外插的風(fēng)險(xiǎn)較大,還需要開展更多的研究工作。
后續(xù)將繼續(xù)探索變可信度模型與氣動(dòng)特性建模的深度融合,考慮改進(jìn)現(xiàn)有的模型理論與算法,建立融入人工經(jīng)驗(yàn)或物理認(rèn)知的變可信度新模型,進(jìn)一步提高氣動(dòng)特性預(yù)測(cè)的智能化水平。同時(shí),發(fā)展對(duì)外插結(jié)果的直接驗(yàn)證方法,更全面系統(tǒng)地評(píng)估不同機(jī)器學(xué)習(xí)融合模型的性能,為工程人員提供技術(shù)參考。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
- 實(shí)驗(yàn)流體力學(xué)的其它文章
- “空氣動(dòng)力實(shí)驗(yàn)智能化探索”專刊簡(jiǎn)介
- 現(xiàn)代試驗(yàn)設(shè)計(jì)及其在空氣動(dòng)力學(xué)中的應(yīng)用進(jìn)展
- 基于深度神經(jīng)網(wǎng)絡(luò)的流場(chǎng)時(shí)空重構(gòu)方法
- 基于卷積神經(jīng)網(wǎng)絡(luò)的近壁流動(dòng)高分辨率平均速度場(chǎng)預(yù)測(cè)方法
- 基于超分辨率重構(gòu)方法的湍流流場(chǎng)重構(gòu)
- 基于多源數(shù)據(jù)融合的翼型表面壓強(qiáng)精細(xì)化重構(gòu)方法