臥式加工中心空間誤差預測與驗證
2022-06-28 09:37:18王調品侯益波
機械設計與制造 2022年6期
王調品,侯益波,何 兵
(1.成都工業職業技術學院裝備制造學院,四川 成都 610218;2.成都優拓優聯萬江科技有限公司,四川 成都 610218)
1 引言
精密數控加工機床精度預測分析始終是國內外研究的熱點,其中數控機床加工精度是衡量機床工作性能的重要指標[1],而由機床幾何誤差復合而成的空間誤差是影響加工精度的主要因素。所以,搭建數控機床完整模型及開展空間誤差預測研究,具有較重要的科研理論研究意義與實際工程價值,亦為機床精度設計技術層面提供完整幾何誤差參數指標。
國內外眾多學者圍繞數控機床空間誤差建模[1-2,9]方面進行了相關研究。國內,文獻[3]以多體系統結合齊次坐標轉換為理論研究基礎,分析了串并混聯機床的幾何誤差。考慮各運動軸幾何誤差的綜合影響,提出了一種串并混聯機床綜合誤差建模方法研究系統。
文獻[4]以INTEGREX 200 型九軸五聯動車銑復合機床為研究對象,借助多體系統動力學搭建了機床空間誤差模型。國外,文獻[5]為提高機床整機加工精度,同樣多體系統理論提出了基于齊次變換和微分運動矩陣的機床幾何誤差建模與補償方法。文獻[6]利用均質矩陣變換構造相對坐標系的運動矩陣。其次,基于齊次變換推導了空間誤差模型。然后通過計算機數控程序重構,提出了一種誤差補償算法。
最后,在軟件中建立的虛擬機床上進行了仿真,驗證了模型和補償算法的有效性。但是傳統機床空間誤差建模結果并未包含全部幾何誤差,并少有給出機床空間誤差模型預測結果。對此,以臥式加工中心為例,采用旋量指數積分析空間誤差并構建機床誤差模型,基于傳統辨識技術識別各項誤差,同時給出空間誤差模型預測結果,開展基于ISO230-6的體對角線對比驗證實驗,為進一步深入研究機床空間誤差補償手段提供必要的理論基礎支撐。
2 旋量理論分析
2.1 剛體運動學
任意剛體運動:剛體從某一位置到另一位置的運動可通過繞某一定軸的轉動加上沿平行于該直線的移動實現。旋量運動[7]的無窮微小運動稱為運動旋量,以幾何形式描述,如圖1所示。

圖1 旋量運動Fig.1 Screw Motion
2.2 旋量指數積
定義了機器人相關坐標系,將參考坐標系R取在固定在基座上,末端坐標系E固定于機器人手臂末端,設末端坐標系在參考系R中的初始位形為E0,各關節單位旋量在參考系R中分別表示為:φ1、φ2、…、φn,γn為各關節單位旋量,φn為相對參考坐標系的關節微小變量,如圖2所示。

圖2 開鏈機器人手臂Fig.2 Open Chain Robot Arm Crew Motion
機器人手臂終止位形Eφ以旋量指數積形式輸出為:

值得注意的是,旋量運動中所有矢量和點均以機床坐標系為參考。
3 數控機床空間誤差建模
3.1 幾何誤差源
影響機床加工精度的因素一般有幾何誤差、熱誤差、伺服系統誤差、力誤差以及載荷誤差[8]等,其中幾何誤差主要包括定位誤差、直線度誤差、垂直度誤差、滾角誤差、偏擺誤差以及俯仰誤差,因其易于測量、受環境影響因素較小,且同樣能夠以旋量指數形式輸出等特點,在恒溫條件下,一般以幾何誤差作為機床加工精度主要誤差來源,主要分為與位置無關誤差和與位置相關誤差共計21項,如表1、圖3所示。

表1 幾何誤差Tab.1 Geometric Error

圖3 幾何誤差原理Fig.3 Principle of Geometric Error
3.2 運動鏈拓撲結構
一般情況下,數控機床機床運動鏈可分為:刀具鏈和工件鏈,刀具鏈、工件鏈分別為從刀尖、工件切削點到機床坐標系的運動鏈。
設定機床坐標系C_xyz為參考坐標系,其坐標原點CO一般為機床回零位置;工件坐標系W_xyz依據實際對刀來確定,刀具坐標系T_xyz設置于刀尖位置,如圖4所示。幾何誤差未參與時,得出刀具運動鏈與工件運動鏈末端理想運動矩陣為:

圖4 機床運動鏈簡圖Fig.4 Kinematic Chain Diagram of Machine Tool

式中:ECT—刀尖相對機床坐標系的理想無誤差運動矩陣;ECW—工件切削點相對機床坐標系的理想無誤差運動矩陣。
為保證機床空間誤差模型的完整性,需確定刀尖點與工件切削點在機床坐標系下的初始位形,參考前文中各坐標系定義,得出在機床坐標系下的位置坐標分別為:

式中:xT、yT、zT—刀尖點在機床坐標系下各軸的投影位置坐標;xW、yW、zW—工件切削點在機床坐標系下各軸的投影位置坐標。
根據以上分析,基于旋量理論將幾何誤差視作機床各軸旋量運動,推導建立刀具運動鏈與工件運動鏈末端實際運動矩陣分別為:

式中:ECT—刀尖相對機床坐標系的實際運動矩陣;ECW—工件切削點相對機床坐標系的實際運動矩陣。
3.3 空間誤差模型
在機床坐標系下,根據機床空間誤差定義[9]:機床進給時,刀具運動鏈末端(刀尖點)與工件運動鏈末端(切削點)實際運動位形間的偏差就是機床空間誤差。綜上所述,推導該臥式加工中心空間誤差模型ΔE:

式中:x、y、z—各軸在機床坐標系下的進給值;Δx、Δy、Δz—空間誤差在x、y、z各軸向分量。
綜上所述,分析了21幾何誤差,定義了機床坐標系、工件坐標系與刀具坐標系,明確給出了刀尖點與工件切削點在機床坐標系下的初始位置坐標,利用旋量指數積推導了工件運動鏈、刀具運動鏈理想與實際運動矩陣,借助空間誤差基本定義建立了機床空間誤差模型。從式(8)中可以看出,該誤差模型包含了21項幾何誤差,實現了基于旋量指數積推導機床空間誤差完整模型的目的。后續只需在完成辨識各項幾何誤差后,任取加工空間中某一點即可預測該點在機床坐標系下的空間誤差。
將旋量指數積引入機床建模中有以下優點:(1)因其參考坐標系設定特點,減少了機床運動軸局部坐標系的建立;(2)避免了傳統建模中因多個局部坐標系建立導致可能產生奇異性的問題。
4 空間誤差模型預測
4.1 幾何誤差辨識
以臥式加工中心為測試目標,基于“12線法”[10]規劃實驗測量軌跡,選用雷尼紹激光干涉儀為實驗測量設備,為保證實驗的可靠性,每條測量軌跡均選取16個測量點,重復測試5次并取平均數,測量加工空間設定為600*600*600(mm),采用十二線法完成機床21項幾何誤差辨識。給出十二線測量結果與21項幾何誤差辨識結果,如圖5、圖6所示。

圖5 12線法測量結果Fig.5 Measurement Results of 12 Wire Method

圖6 18項幾何誤差辨識結果Fig.6 18 Geometric Error Identification Results
3 項Sxy、Syz、Sxz垂直度誤差辨識結果分別為-1.18μ/m、-3.56μ/m、-6.31μ/m。
4.2 預測模型分析
機床空間誤差模型的準確性間接決定了后續誤差補償效果良好的可能性,而模型的準確性體現在加工空間中各點模型預測結果與實驗測量結果的對比。
為直觀表達機床空間誤差模型預測結果,結合前文中21項幾何誤差辨識結果,帶入式(8)中,基于Matlab軟件輸出該臥式加工中心空間誤差預測結果,一種顏色代表空間誤差最弱區域,另一種顏色代表空間誤差反應強烈區域,如圖7所示。

圖7 加工空間空間誤差預測圖Fig.7 Prediction Diagram of Machining Volumetric Error
任意給定加工空間任意一點即可直接該點空間誤差顯示結果。可以看出,該機床越靠近行程正向位置,則反映了空間誤差對機床加工精度影響越大。不僅有利于看出加工空間中各點空間誤差對機床的影響趨勢,更有利于為后續機床誤差補償提供強有力的預測理論模型。
4.3 實驗驗證
為了驗證基于旋量指數積的臥式加工中心空間誤差預測模型的可行性,以及采用十二線法辨識技術手段的有效性,基于ISO230-6[11]展開四條對角線測量實驗。規劃四條體對角線測量軌跡,同時結合式(8)及其21項幾何誤差結果給出四條體對角線各點預測值,如圖8所示。給出實驗測量結果與模型預測數據對比,如圖9、表2所示。

表2 測量值與預測值對比圖Tab.2 Comparison Between Measured Value and Predicted Value

圖8 體對角線測量路徑Fig.8 Body Diagonal Measurement Path
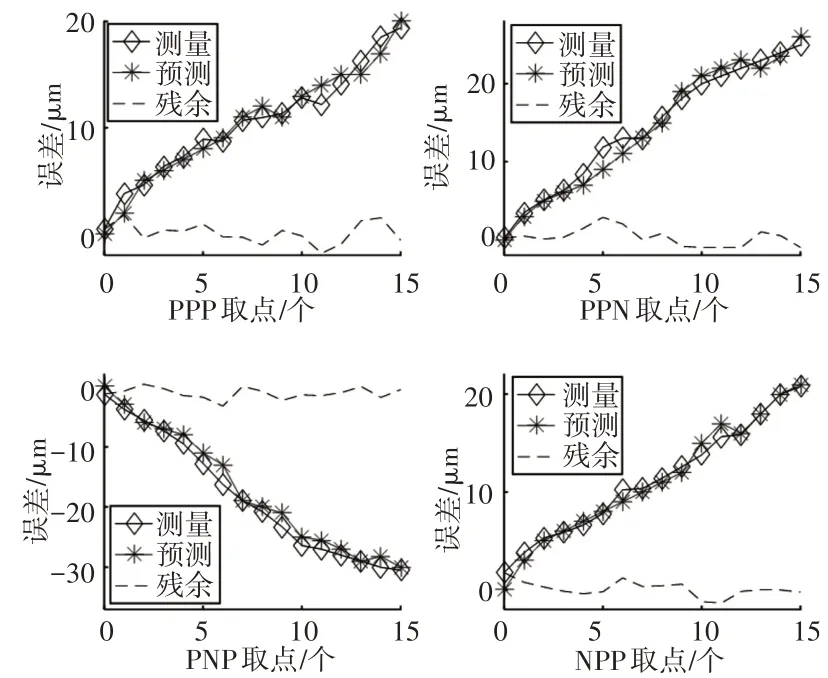
圖9 體對角線模型預測值與實驗測量值對比Fig.9 Comparison Between Predicted Value of Body Diagonal Model and Measured Value of Experiment
結果表明:最小相對誤差為0.29%(對應殘差為0.09μm),且最大相對誤差為11.21%(對應殘差為0.13μm),因此四條體對角線實驗測量值與模型預測值符合程度較高,充分驗證了基于旋量指數積的臥式加工中心空間誤差完整建模及其預測分析方法正確、有效。
5 結論
(1)借助旋量剛體運動理論描述了機器人手臂關節軸線微小運動,從而建立機器人末端實際位形旋量指數積數學模型。(2)分析了機床21項幾何誤差及其幾何形式,同時輸出該臥式加工中心運動鏈拓撲簡圖,因首先確定了刀尖點與工件切削點在機床坐標系下的初始位形,從而建立了包含21項幾何誤差的機床完整數學模型。(3)利用十二線法辨識了21項幾何誤差,輸出空間誤差預測結果,基于ISO2002-6對角線空間誤差評定標準,對比了對角線模型預測值與實驗測量值。結果顯示四條體對角線符合程度較高,最小相對誤差為0.29%(對應殘差為0.09μm),且最大相對誤差為11.21%(對應殘差為0.13μm),不僅充分驗證了基于旋量指數積的機床空間誤差完整模型正確、有效,更為后續機床空間誤差補償技術提供堅實的理論基礎與數據參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
