基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)
2022-06-27 01:23:36王艷
測(cè)控技術(shù) 2022年6期
王 艷
(秦皇島市計(jì)量測(cè)試研究所,河北 秦皇島 066099)
皮帶運(yùn)輸機(jī)是運(yùn)用皮帶運(yùn)輸物料的機(jī)械,在冶金、礦山等行業(yè)被廣泛應(yīng)用。皮帶運(yùn)輸機(jī)運(yùn)行時(shí)皮帶跑偏是最常見(jiàn)的故障,跑偏的根本原因是皮帶寬度方向的合力不為零或皮帶寬度垂直方向的拉力不均勻,造成這種現(xiàn)象的原因主要有以下幾種:① 因皮帶運(yùn)行時(shí)間太長(zhǎng)導(dǎo)致內(nèi)部組織結(jié)構(gòu)不均勻;② 長(zhǎng)期不清理導(dǎo)致皮帶表層結(jié)垢嚴(yán)重;③ 滾筒不平造成皮帶跑偏;④ 皮帶上運(yùn)輸物料分布不均勻。皮帶跑偏會(huì)引起系統(tǒng)故障停機(jī),影響生產(chǎn)作業(yè)效率,也會(huì)造成設(shè)備中主要部件的非正常損壞,甚至?xí)黾影踩鹿拾l(fā)生的概率。現(xiàn)有的基于圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)雖然可以檢測(cè)出皮帶跑偏,但大多存在識(shí)別速率慢和識(shí)別精度差的問(wèn)題,而且由于工況導(dǎo)致拍攝圖像失真,使誤報(bào)率較高,嚴(yán)重影響了皮帶機(jī)跑偏檢測(cè)系統(tǒng)的可靠性。綜上所述,目前還缺少一種可以在惡劣工況下進(jìn)行皮帶機(jī)跑偏檢測(cè),同時(shí)具有低故障誤報(bào)率以保證其可靠性的皮帶機(jī)跑偏檢測(cè)系統(tǒng)。
聲源定位技術(shù)利用聲波的傳播和聲音信號(hào)的特點(diǎn)來(lái)測(cè)定聲源的位置和距離。隨著科技的發(fā)展和社會(huì)的進(jìn)步,聲源定位技術(shù)被廣泛應(yīng)用于各種場(chǎng)景[1-6]。經(jīng)過(guò)多年發(fā)展,聲源定位技術(shù)逐漸走向成熟,通過(guò)麥克風(fēng)陣列接收聲音信息估計(jì)聲源位置是聲源定位的主要方式,其方法一般被歸為3類(lèi):① 波束形成[7-8],對(duì)麥克風(fēng)陣列采集的聲音信號(hào)預(yù)處理,得到聲壓信號(hào)后延時(shí)求和,將1個(gè)平面的聲壓分布進(jìn)行成像可視化,此類(lèi)方法魯棒性強(qiáng),不需要先驗(yàn)知識(shí),使用簡(jiǎn)單直觀。② 聲全息[9-10],根據(jù)被測(cè)物的聲場(chǎng)數(shù)學(xué)模型,麥克風(fēng)陣列采集多點(diǎn)聲壓值,重構(gòu)整個(gè)聲場(chǎng)信息,此類(lèi)方法對(duì)低頻聲源也有很好的分辨力。③ 參數(shù)測(cè)量[11-13],通過(guò)聲源的位置信息參數(shù)構(gòu)建函數(shù)關(guān)系求解聲源位置,例如到達(dá)時(shí)間差(Time Difference of Arrival,TDOA)、波達(dá)方向(Direction of Arrival,DOA)、接收信號(hào)強(qiáng)度(Received Signal Strength,RSS)等。目前廣義互相關(guān)-相位變換(Generalized Cross Correlation-Phase Transform,GCC-PHAT)時(shí)延估計(jì)算法在聲源定位中展現(xiàn)出了其優(yōu)越的性能和發(fā)展空間。
綜上所述,解決皮帶機(jī)在運(yùn)行過(guò)程中的跑偏,可采用機(jī)械的故障診斷和噪聲分析方面的知識(shí),故筆者提出了一種基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)。在硬件設(shè)計(jì)方面,合理考慮各個(gè)設(shè)備和皮帶機(jī)的構(gòu)造,在不影響皮帶機(jī)正常運(yùn)作的情況下進(jìn)行跑偏檢測(cè);在軟件設(shè)計(jì)方面,將聲源定位技術(shù)和圖像處理技術(shù)相結(jié)合,保證皮帶跑偏的故障診斷的準(zhǔn)確性。進(jìn)一步將聲源定位與卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network,CNN)[14]結(jié)合輸出定位結(jié)果,并將圖像處理和支持向量機(jī)(Support Vector Machine,SVM)結(jié)合進(jìn)行故障程度分類(lèi),同時(shí)仿真驗(yàn)證了所設(shè)計(jì)系統(tǒng)的可行性和準(zhǔn)確性。
1 系統(tǒng)方案
基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)的硬件結(jié)構(gòu)示意圖如圖1所示。工業(yè)攝像機(jī)安裝在相機(jī)底座上,用于拍攝異常聲源位置圖像,為保證其拍攝角度的靈活性,相機(jī)底座通過(guò)電機(jī)驅(qū)動(dòng)軸驅(qū)動(dòng),并與皮帶機(jī)支架固定在一起,置于皮帶機(jī)的上方。麥克風(fēng)陣列和鑒頻器被置于皮帶機(jī)的上方分別用于拾取聲音信號(hào)和鑒頻識(shí)別。工業(yè)攝像機(jī)、麥克風(fēng)陣列、電機(jī)與上位機(jī)系統(tǒng)相連接。
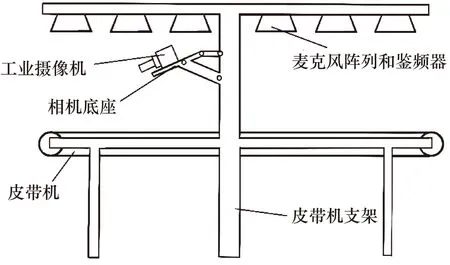
圖1 基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)的硬件結(jié)構(gòu)示意圖
1.1 系統(tǒng)軟件組成
基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)的軟件組成分為3個(gè)模塊,即異常聲源檢測(cè)與定位模塊、圖像采集與處理模塊和報(bào)警處理模塊,系統(tǒng)構(gòu)成如圖2所示。
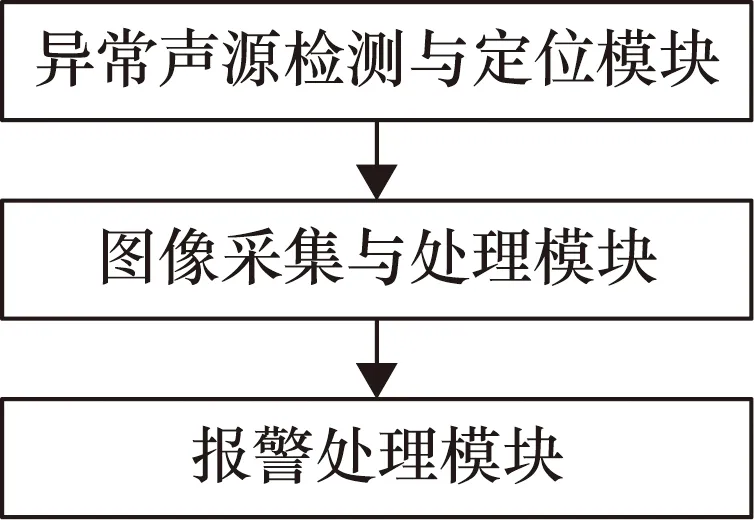
圖2 基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)構(gòu)成
基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)工作流程如圖3所示。首先,使用麥克風(fēng)陣列拾取聲音信號(hào),通過(guò)鑒頻器對(duì)異常聲音進(jìn)行鑒頻識(shí)別,并通過(guò)麥克風(fēng)陣列檢測(cè)出現(xiàn)異常頻率聲音的位置;其次,通過(guò)可調(diào)角度的工業(yè)攝像機(jī)根據(jù)異常聲源位置自動(dòng)調(diào)節(jié)角度,拍攝異常位置照片,并將照片傳送到上位機(jī);最后,進(jìn)行圖像分析與處理,提取皮帶特征,結(jié)合SVM來(lái)判斷皮帶是否跑偏和跑偏的嚴(yán)重程度,并將判斷結(jié)果發(fā)送到報(bào)警系統(tǒng),報(bào)警系統(tǒng)根據(jù)故障診斷結(jié)果選擇執(zhí)行不同的報(bào)警方案。

圖3 基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng)工作流程
1.2 基于麥克風(fēng)陣列的聲源檢測(cè)與定位系統(tǒng)
基于麥克風(fēng)陣列的聲源檢測(cè)與定位系統(tǒng)工作原理如圖4所示。使用麥克風(fēng)陣列拾取聲音信號(hào),并對(duì)聲音信號(hào)進(jìn)行濾波和放大處理,通過(guò)鑒頻器對(duì)放大后的聲音進(jìn)行鑒頻識(shí)別,判斷是否有指定頻率范圍的信號(hào),從而實(shí)現(xiàn)對(duì)異常聲音的檢測(cè)。

圖4 基于麥克風(fēng)陣列的聲源檢測(cè)與定位系統(tǒng)工作原理圖
基于平面直角坐標(biāo)系建立麥克風(fēng)陣列的聲源定位基本模型,如圖5所示。
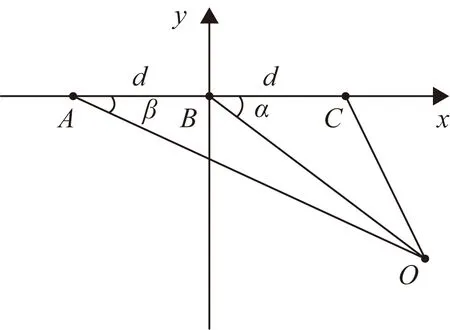
圖5 麥克風(fēng)陣列的聲源定位基本模型
其中皮帶機(jī)產(chǎn)生的異常聲源點(diǎn)為O,選取陣列中的麥克風(fēng)①~麥克風(fēng)③分別位于A、B、C,間距設(shè)為d,即AB=BC=d,α為OB與x軸的夾角,β為OA與x軸的夾角。對(duì)異常聲音定位使用基于時(shí)延差的麥克風(fēng)陣列聲源定位算法,由余弦定理可得:
OC2=OB2+d2+2d·OB·cosα
(1)
OA2=OB2+d2-2d·OB·cosβ
(2)
若皮帶機(jī)工作環(huán)境的聲速vs已知,取麥克風(fēng)①和麥克風(fēng)②在接收聲源信號(hào)后的時(shí)延差為τAB,麥克風(fēng)②和麥克風(fēng)③在接收聲源信號(hào)后的時(shí)延差為τBC,則有:
OC=OB+vs·τAB
(3)
OA=OB-vs·τBC
(4)
由式(1)~式(4),解得
(5)
(6)
根據(jù)異常聲源到達(dá)不同麥克風(fēng)的時(shí)間差,轉(zhuǎn)換為對(duì)應(yīng)的聲程差,通過(guò)聲源定位算法計(jì)算得到異常聲源的位置。其中對(duì)時(shí)間延遲τ的估計(jì)采用廣義互相關(guān)算法[15],此算法在頻域內(nèi)給予加權(quán),從而對(duì)信號(hào)和噪聲進(jìn)行白化處理,求取信號(hào)間的互功率譜,增強(qiáng)信噪比高的成分,抑制噪聲的影響,通過(guò)時(shí)域變化得到信號(hào)間的廣義互相關(guān)函數(shù)并提高時(shí)延估計(jì)的精度。
皮帶機(jī)的工作環(huán)境中存在的混響會(huì)產(chǎn)生噪聲,為減小影響選擇相位變換加權(quán)[16]作為加權(quán)函數(shù)。
首先對(duì)n時(shí)刻第p個(gè)和第q個(gè)麥克風(fēng)接收到的信號(hào)計(jì)算其傅里葉變換xp(ω)和xq(ω),然后計(jì)算互功率譜為
(7)
對(duì)互功率譜進(jìn)行傅里葉反變換,求得廣義互相關(guān)函數(shù)Hp,q(λ)為
(8)
處理后可簡(jiǎn)化為
(9)
進(jìn)一步,對(duì)廣義互相關(guān)函數(shù)加權(quán)為
(10)
將相位變換的加權(quán)廣義互相關(guān)函數(shù)作為訓(xùn)練特征,輸入到CNN進(jìn)行特征訓(xùn)練,CNN構(gòu)成如圖6所示。卷積層負(fù)責(zé)提取圖像特征,激勵(lì)層負(fù)責(zé)非線性映射,池化層負(fù)責(zé)映射特征壓縮,全連接層負(fù)責(zé)連接輸出層,輸出層使用Softmax函數(shù)輸出皮帶機(jī)的聲源位置。
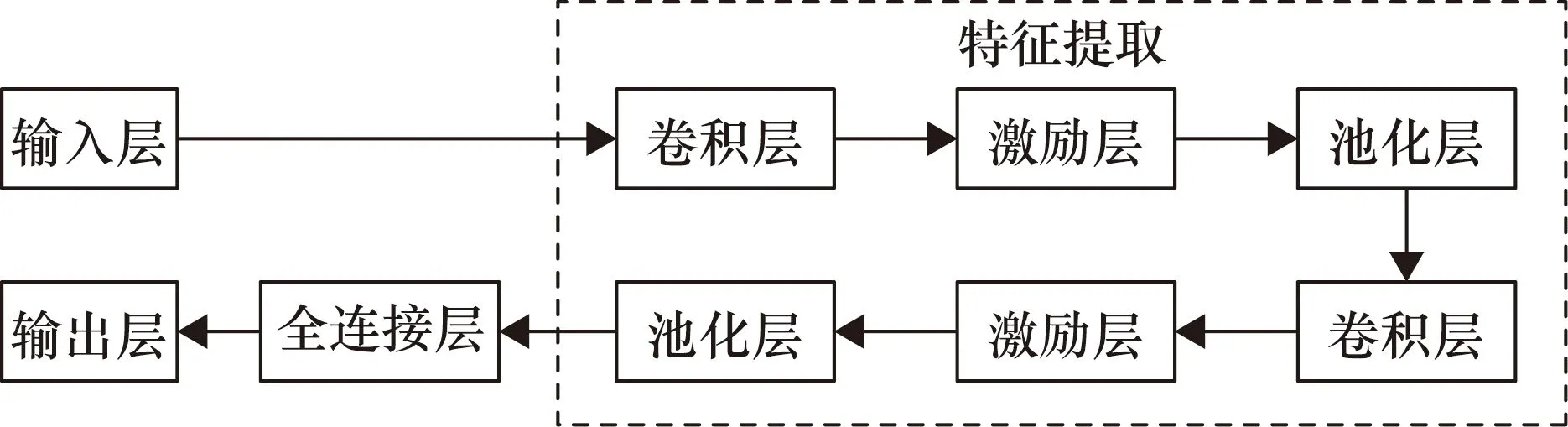
圖6 CNN構(gòu)成
CNN結(jié)構(gòu)網(wǎng)絡(luò)參數(shù)如表1所示,采用2×2最大池化作為CNN中的池化窗口。
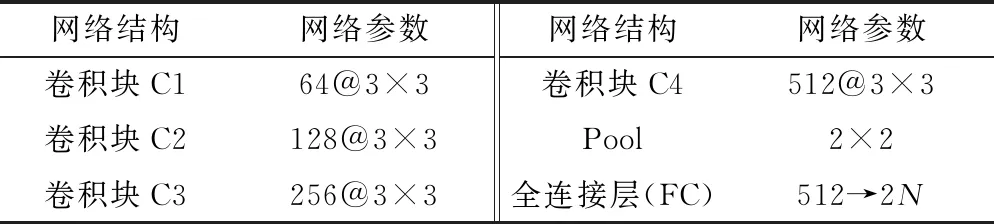
表1 CNN結(jié)構(gòu)網(wǎng)絡(luò)參數(shù)
通過(guò)一系列的異常聲源檢測(cè)處理后,定位異常聲源,同時(shí)位于皮帶機(jī)支架上的工業(yè)攝像機(jī)自動(dòng)調(diào)節(jié)角度到需要位置進(jìn)行拍攝,并將拍攝照片傳回上位機(jī)系統(tǒng)。
1.3 基于圖像處理的故障診斷系統(tǒng)
基于圖像處理的故障診斷系統(tǒng)的工作原理如圖7所示。在識(shí)別到異常聲源后,工業(yè)攝像機(jī)調(diào)整拍攝視角,對(duì)異常聲源位置進(jìn)行抓拍,上位機(jī)獲得攝像機(jī)傳回的圖像后,對(duì)圖像進(jìn)行必要的格式轉(zhuǎn)換;然后進(jìn)行裁切、旋轉(zhuǎn),以及調(diào)整對(duì)比度和亮度等一系列預(yù)處理步驟;對(duì)經(jīng)過(guò)預(yù)處理的圖像進(jìn)行圖像分割,將傳送皮帶與背景分割開(kāi)。
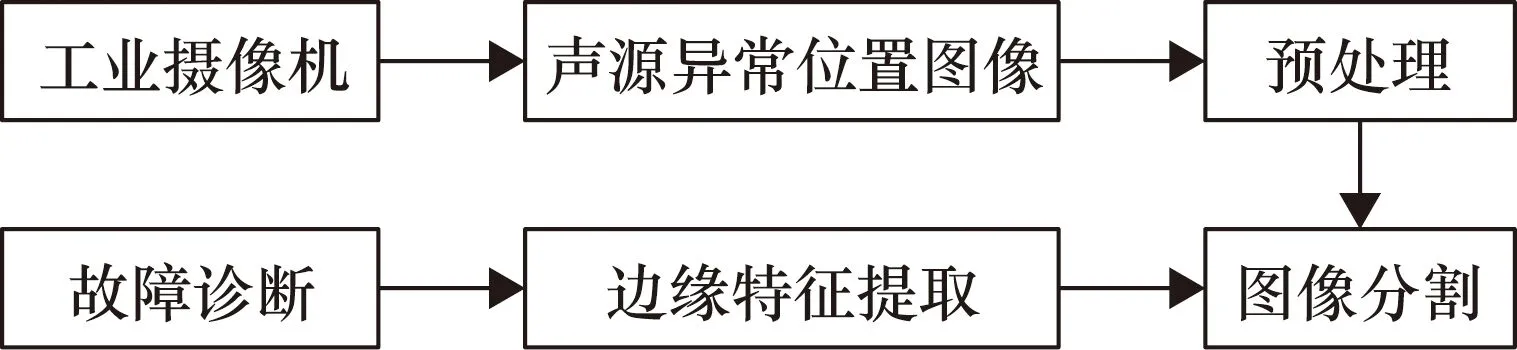
圖7 基于圖像處理的故障診斷系統(tǒng)的工作原理圖
本系統(tǒng)采用灰度平均法來(lái)分割圖像,根據(jù)像素的灰度值進(jìn)行圖像分割,對(duì)于一幅像素為M×N的圖像,有如下公式:
(11)

(12)

(13)
式中:mf為平均灰度值;u(j)和v(j)分別為列極小值向量和列極大值向量;f(i,j)為像素i、j位置處的灰度圖像值。利用列極小值向量u(j)和列極大值向量v(j)計(jì)算:
(14)
由mf和muv可得閾值Th為
Th=max(mf,muv)
(15)
進(jìn)而將獲取的皮帶機(jī)異常聲源圖像處理為二值圖像b(i,j),公式為
(16)
對(duì)于二值化的圖像,背景表示為“1”,輸送帶表示為“0”,特征函數(shù)為
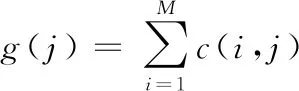
(17)
式中:g(j)的取值范圍為[0,M]。圖像分割后進(jìn)行邊緣特征提取,將g(j)中皮帶和背景的分界線用線性函數(shù)進(jìn)行擬合,可得兩條分界線,定義皮帶邊緣和其高度方向的夾角為跑偏角,將左側(cè)和右側(cè)擬合線的斜率分別記為k1和k2,根據(jù)左右側(cè)分界線分別計(jì)算得到皮帶邊緣和圖像邊緣的距離d1和d2。
由此可得特征向量為
R=(k1,k2,d1,d2)
(18)
由式(18)可知,可利用跑偏角和偏移量計(jì)算皮帶機(jī)跑偏閾值范圍,結(jié)合SVM來(lái)判斷皮帶是否跑偏和跑偏的嚴(yán)重程度,并將判斷結(jié)果發(fā)送到報(bào)警系統(tǒng)。
本系統(tǒng)采用Canny算子邊緣檢測(cè)提取圖像邊緣特征,針對(duì)經(jīng)典Canny算子邊緣檢測(cè)算法受環(huán)境影響所導(dǎo)致的提取精度差、干擾大的問(wèn)題進(jìn)行了優(yōu)化,共分為以下5個(gè)步驟。
① 采用中值濾波代替高斯濾波,平滑故障位置皮帶機(jī)圖像。
② 考慮45°和135°的影響,計(jì)算梯度幅值和方向。
③ 對(duì)梯度幅值進(jìn)行非極大值抑制。
④ 用雙閾值法進(jìn)行檢測(cè)并連接邊緣。
⑤ 利用滯后技術(shù)跟蹤邊界。
1.4 報(bào)警處理系統(tǒng)
報(bào)警系統(tǒng)設(shè)定為高低2種級(jí)別的聲光報(bào)警系統(tǒng),當(dāng)判斷結(jié)果為不嚴(yán)重時(shí),啟用低級(jí)別的報(bào)警處理,報(bào)警系統(tǒng)利用監(jiān)控主機(jī)的音箱發(fā)出報(bào)警語(yǔ)音,提醒皮帶機(jī)出現(xiàn)跑偏現(xiàn)象;當(dāng)判斷結(jié)果為嚴(yán)重時(shí),啟用高級(jí)別的報(bào)警處理,在使用監(jiān)控主機(jī)的音箱的同時(shí),啟動(dòng)聲光報(bào)警器,提醒皮帶機(jī)出現(xiàn)嚴(yán)重跑偏,急需處理,此時(shí)監(jiān)控主機(jī)發(fā)出皮帶機(jī)急停的信號(hào)。
2 測(cè)試及結(jié)果分析
2.1 聲源差異性分析
利用麥克風(fēng)陣列采集皮帶機(jī)正常聲音信號(hào)和皮帶機(jī)空載狀態(tài)下故障聲音信號(hào),嚴(yán)格控制麥克風(fēng)布置部位,輸出兩者噪聲頻譜并進(jìn)行差異性分析,如圖8和圖9所示。
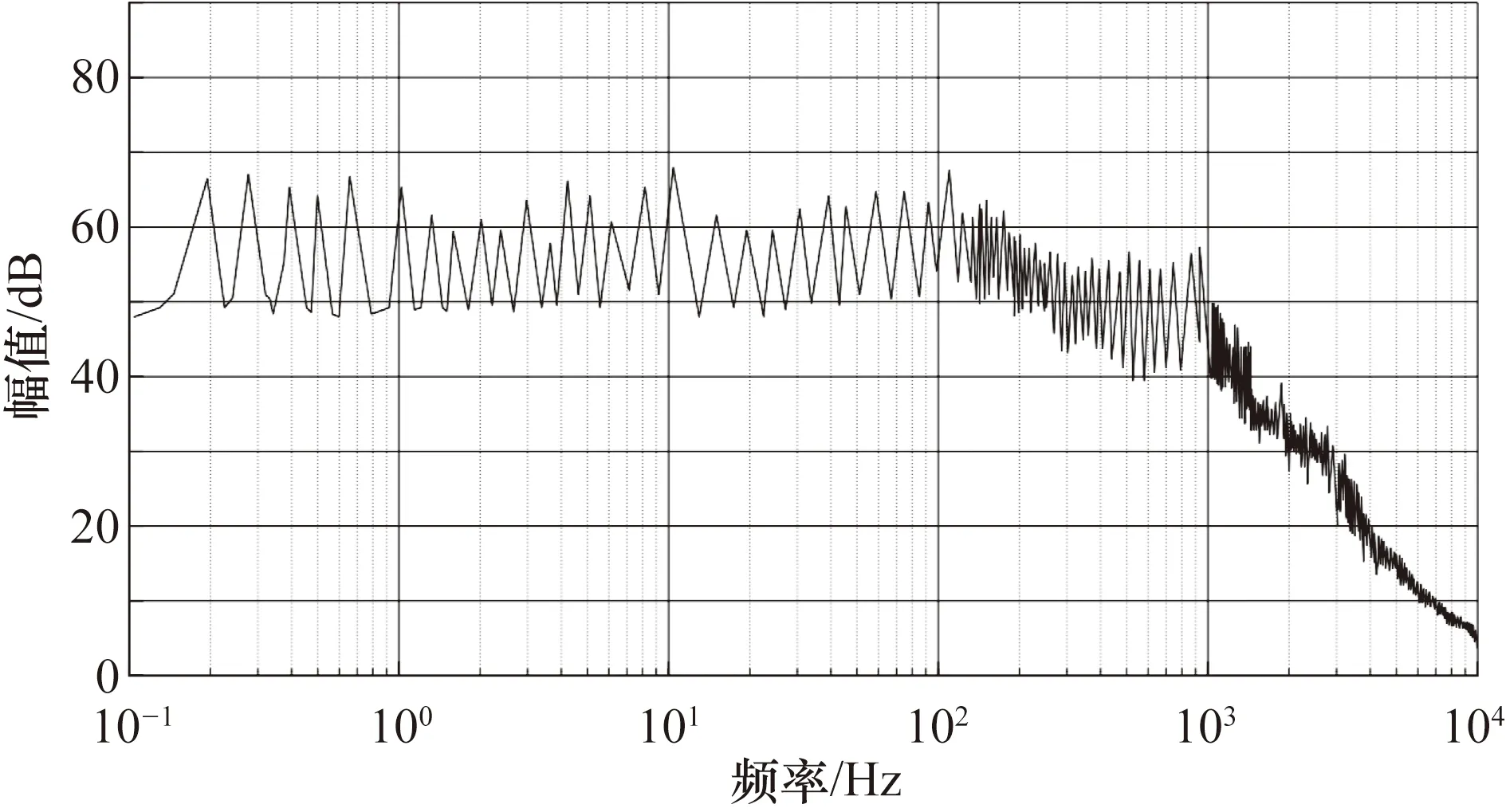
圖8 皮帶機(jī)正常運(yùn)作時(shí)聲音信號(hào)頻譜圖
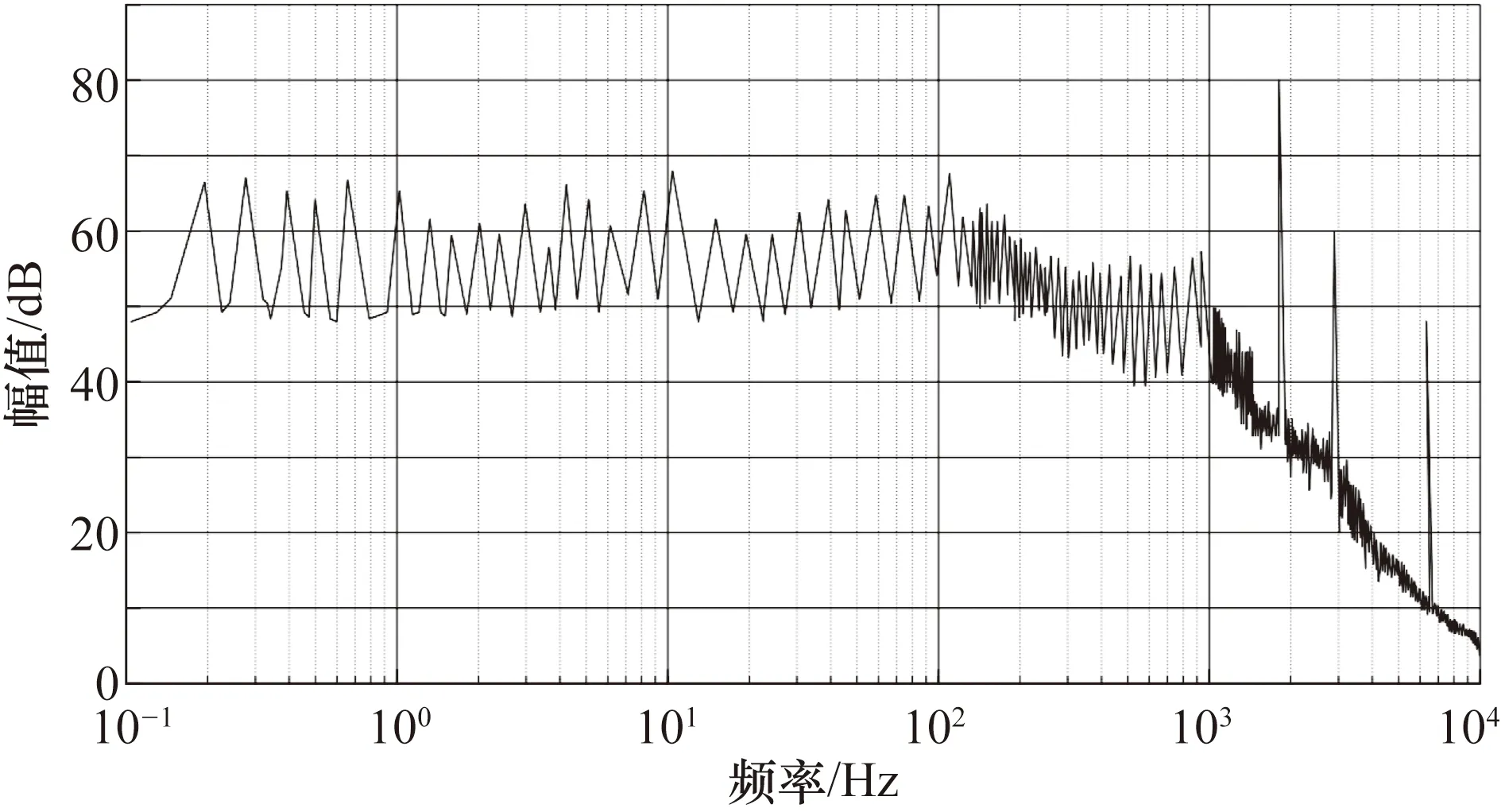
圖9 皮帶機(jī)出現(xiàn)故障時(shí)聲音信號(hào)頻譜圖
由圖9可見(jiàn),當(dāng)皮帶機(jī)出現(xiàn)故障問(wèn)題時(shí),出現(xiàn)了明顯的峰值,聲音的強(qiáng)度和頻率有明顯改變。
2.2 故障聲源定位仿真
用MATLAB對(duì)皮帶機(jī)的聲音信號(hào)進(jìn)行仿真,采用高斯白噪聲作為模擬聲源信號(hào),根據(jù)語(yǔ)音信號(hào)的特點(diǎn),設(shè)定聲源O,其采樣頻率為20 kHz,采樣點(diǎn)數(shù)為256,生成的故障聲音信號(hào)如圖10所示。設(shè)定聲速為340 m/s,信噪比為-10,設(shè)定麥克風(fēng)①~麥克風(fēng)③,且AB、BC的間距設(shè)為10 cm,計(jì)算信號(hào)之間的延遲并轉(zhuǎn)換相差點(diǎn)數(shù),得到麥克風(fēng)接收的聲音信號(hào),其時(shí)域圖如圖11所示。
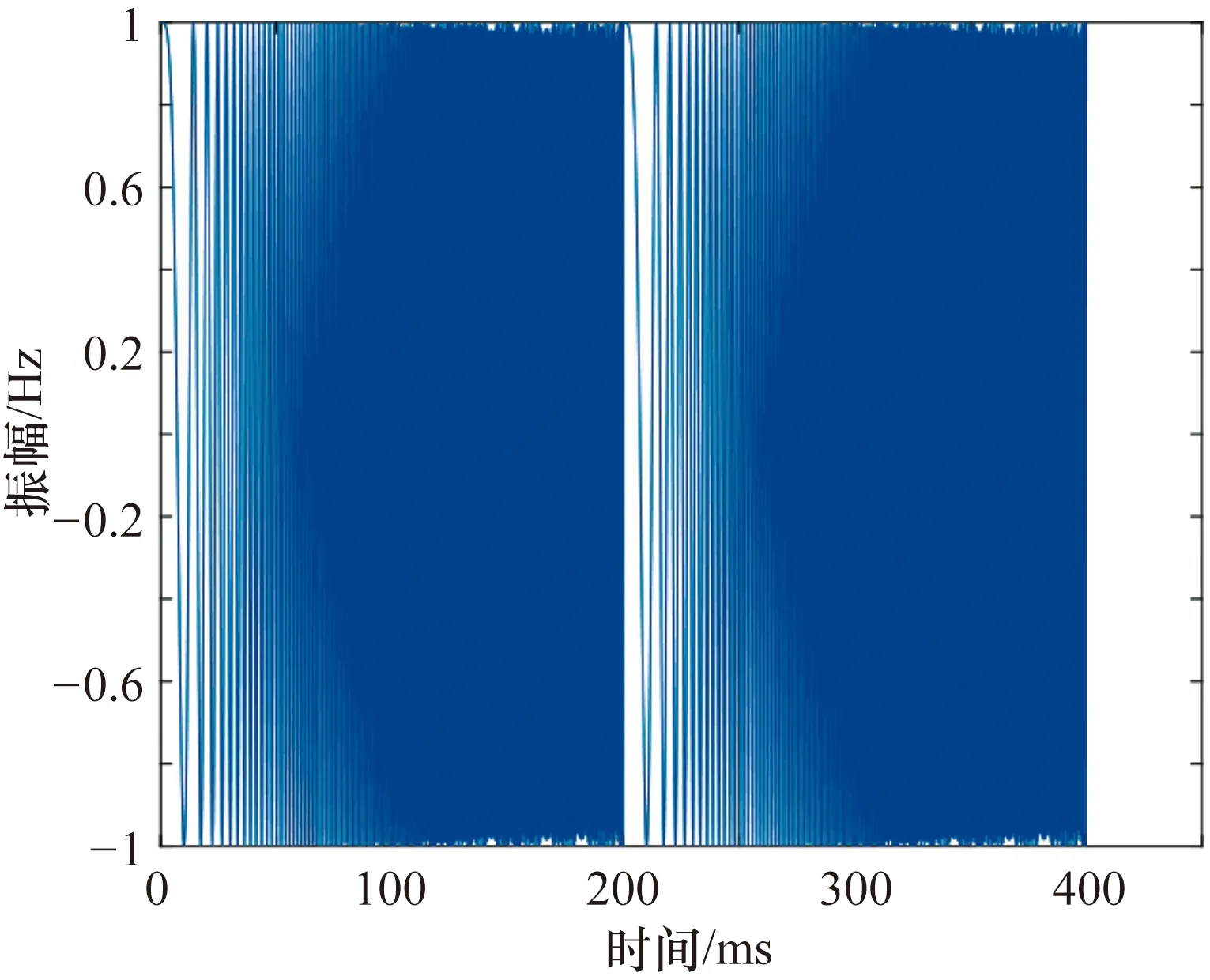
圖10 MATLAB生成故障聲音信號(hào)
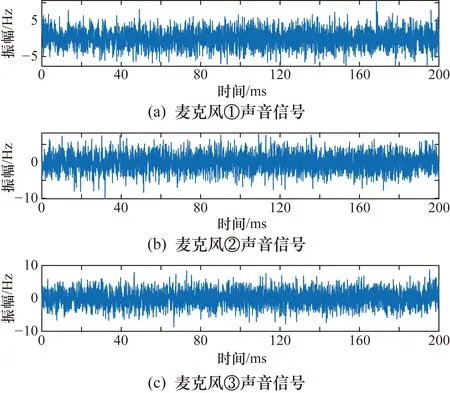
圖11 麥克風(fēng)接收到的聲音信號(hào)
在對(duì)接收到的故障聲音信號(hào)進(jìn)行濾波放大預(yù)處理后,采用廣義互相關(guān)算法進(jìn)行時(shí)延估計(jì),在得到廣義互相關(guān)函數(shù)后,根據(jù)聲音信號(hào)的噪聲干擾,選擇相位變換法(PHAT)作為廣義互相關(guān)加權(quán)函數(shù),并加入高斯白噪聲,實(shí)現(xiàn)時(shí)延仿真的準(zhǔn)確估計(jì)。
本文設(shè)計(jì)4種不同深度的CNN結(jié)構(gòu)模型,即LetNet-5的5層結(jié)構(gòu)模型和VGG的9層、11層、13層結(jié)構(gòu)模型,并為其分別配置相應(yīng)的卷積層和池化層,如表2所示。

表2 4種不同深度的CNN結(jié)構(gòu)模型配置
在得到估計(jì)結(jié)果后,將得到的相位變換加權(quán)廣義互相關(guān)函數(shù)作為訓(xùn)練特征輸入至CNN訓(xùn)練。根據(jù)評(píng)價(jià)指標(biāo)比較驗(yàn)證4種不同深度的CNN的性能,如表3所示。
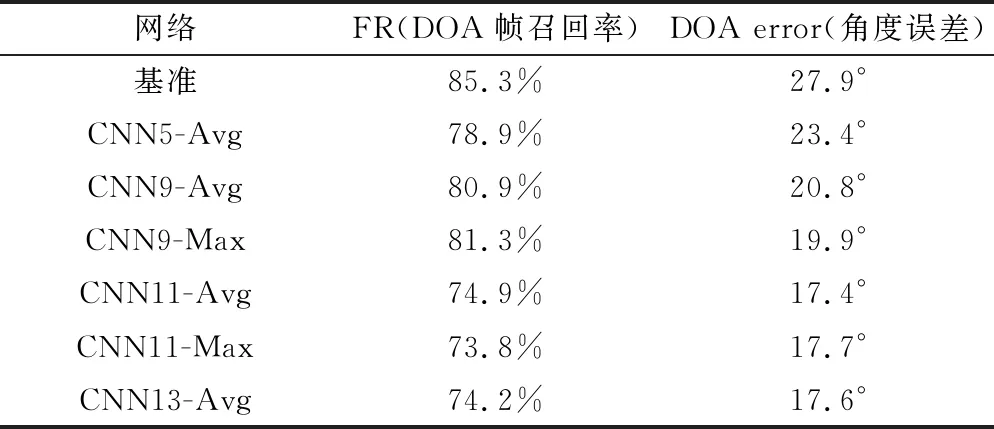
表3 4種不同深度的CNN的性能
由評(píng)價(jià)指標(biāo)角度誤差(DOA error)可知,深度為5層、9層和11層的CNN結(jié)構(gòu)性能相近,13層的CNN結(jié)構(gòu)存在過(guò)擬合現(xiàn)象,經(jīng)過(guò)篩選和比較后,CNN9-Max的網(wǎng)絡(luò)結(jié)構(gòu)性能最好。
2.3 圖像處理仿真
在完成故障聲源定位仿真后,接下來(lái)實(shí)現(xiàn)圖像處理的仿真。在MATLAB中編寫(xiě)圖像處理程序,利用灰度平均法將輸入的RGB圖像灰度化后分割,然后再將其二值化處理,RGB圖像、灰度圖像和二值化圖像如圖12所示。
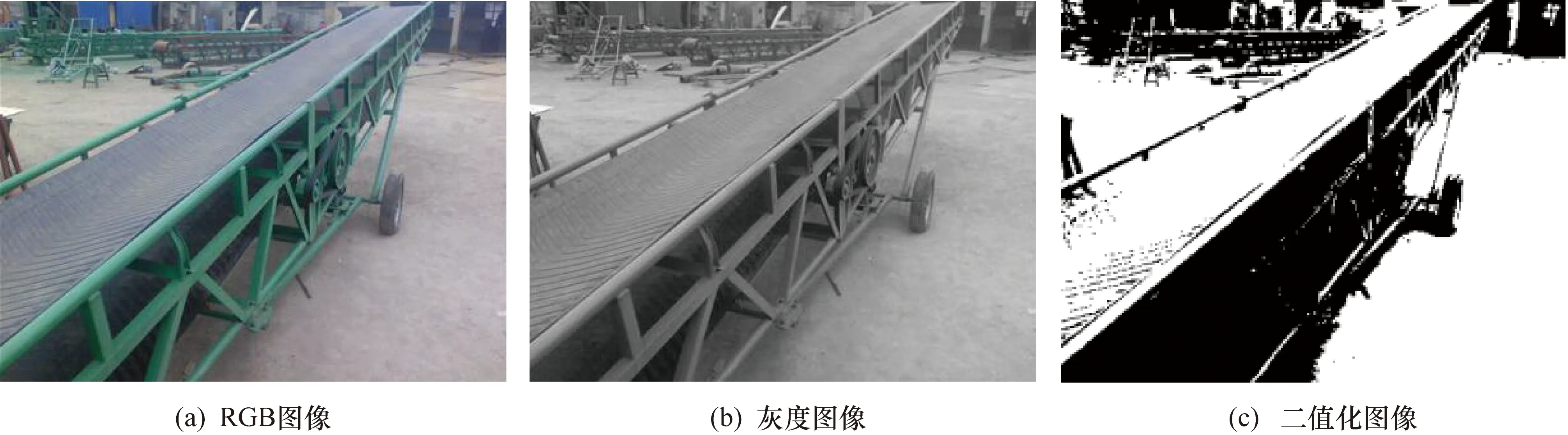
圖12 RGB圖像、灰度圖像、二值化圖像
在得到灰度圖像后,將其轉(zhuǎn)換為灰度直方圖,采用Canny算子提取灰度圖像邊緣特征,用MATLAB進(jìn)行仿真實(shí)驗(yàn),比較經(jīng)典Canny算法和改進(jìn)后的Canny算法,并對(duì)實(shí)驗(yàn)結(jié)果進(jìn)行比對(duì)和分析,皮帶機(jī)圖像效果對(duì)比如圖13所示。
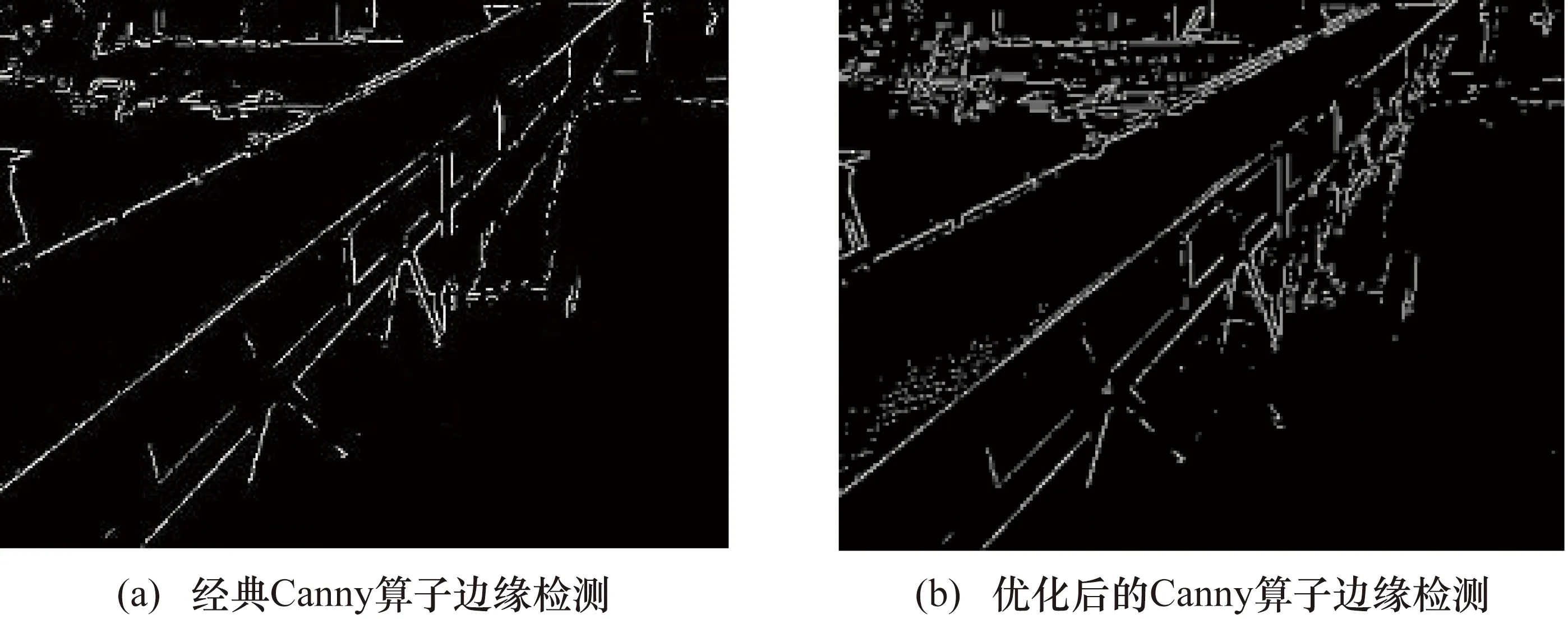
圖13 皮帶機(jī)圖像效果對(duì)比
根據(jù)仿真結(jié)果可知,優(yōu)化后的Canny算子邊緣檢測(cè)可以檢測(cè)到更多的邊緣細(xì)節(jié)信息,明顯抑制噪聲,降低了干擾問(wèn)題并將傳送帶和背景分割開(kāi),因此可以將皮帶機(jī)故障位置圖像作為輸入,準(zhǔn)確識(shí)別皮帶機(jī)邊緣后,根據(jù)跑偏角和偏移量設(shè)定跑偏的閾值范圍,結(jié)合SVM故障診斷,判斷皮帶機(jī)的跑偏程度,跑偏檢測(cè)結(jié)果如圖14所示。可以看出優(yōu)化后的Canny算法可以快速準(zhǔn)確地判斷出皮帶機(jī)的跑偏程度。

圖14 跑偏檢測(cè)結(jié)果
3 結(jié)束語(yǔ)
本文提出了一種基于聲音陣列和圖像處理的皮帶機(jī)跑偏檢測(cè)系統(tǒng),從硬件和軟件2個(gè)方面分別進(jìn)行了設(shè)計(jì),采集皮帶機(jī)故障聲源的聲音信號(hào)進(jìn)行聲源定位后,采集故障聲源圖像通過(guò)圖像處理技術(shù)判斷其故障程度。在聲源定位時(shí),對(duì)聲音信號(hào)預(yù)處理,采用GCC-PHAT和CNN相結(jié)合的方法,降低工作環(huán)境產(chǎn)生的噪聲影響,減少定位產(chǎn)生的誤差。在圖像處理時(shí),對(duì)聲源位置圖像預(yù)處理,對(duì)二值化后的圖像圖像進(jìn)行分割,提取邊緣特征,利用跑偏角和偏移量得到跑偏閾值,并結(jié)合SVM進(jìn)行皮帶機(jī)的故障診斷,同時(shí)判斷故障程度。最后仿真驗(yàn)證了本系統(tǒng)的可行性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
裝備制造技術(shù)(2020年9期)2021-01-26 00:15:12
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
同煤科技(2015年2期)2015-02-28 16:59:14
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39