低空無人機傾斜攝影測量實景三維模型構建
2022-05-09 02:42:44趙琪
兵器裝備工程學報 2022年4期
趙 琪
(中國人民警察大學(廣州), 廣州 510663)
1 引言
傾斜攝影測量是通過無人機搭載相機,從左視、右視、前視、后視以及正視五個方向對地面進行拍攝,經過一系列的處理得到地面信息數據。無人機傾斜測量技術已廣泛應用于人們生活與工作中[1],點云數據、數字正射影像圖等均屬于數字測繪產品。軍用無人機遙控設備根據其控制方式,主要分為無線電遙控、自動程序控制和綜合控制3種類型。無人機或小型飛機做局部地區測量,可以很精細描繪出地形圖和數字地表模型,用于軍事目標。以往通常僅可采用搭載單相機拍攝場景圖像,傾斜攝影測量技術從眾多角度利用多個傳感器采集場景數據,令所采集場景信息更加豐富,可有效體現場景地面紋理信息[2]。低空無人機傾斜攝影測量技術具有自動化程度高、后期處理方便等優勢,令所建立三維實景模型更加準確以及可靠[3]。低空無人機傾斜攝影測量技術所建立三維實景模型具有精度高、性價比高以及紋理真實的優勢,將其應用于城市規劃、建設智慧城市等眾多應用中[4],可提升服務的精準性以及高效性。傾斜攝影測量是目前較為有效的獲取地表信息的重要技術,影像獲取質量決定了航空影像質量以及所建立三維實景模型質量[5]。
國內外學者針對無人機傾斜攝影測量建立三維模型研究較多,文獻[6]提出了基于無人機傾斜攝影的建筑物三維建模方法,以拓普康獵鷹8號八旋翼無人機平臺為例,通過分析該平臺獲取的低空攝影測量數據,利用Smart 3D軟件對建筑物進行建模,該方法沒有對圖像信息進一步處理,測量的精度還需進一步加強。文獻[7]提出了無人機攝影獲取單木三維信息方法研究,基于傾斜攝影測量技術,以多旋翼無人機為數據采集平臺,實現了孤立單木的三維點云模型重建。在此基礎上,建立了單木三維信息量測算法。該方法算法存在缺陷,在建立圖像相似區域三維模型時會出現誤匹配問題,使構建模型的各檢查點精度低。
為了解決上述問題,構建了低空無人機傾斜攝影測量實景三維模型,選取某高校綜合樓作為對象,將左視、右視、前視、后視以及正視相機搭載于四旋翼無人機中,令無人機低空飛行,采集地面像控點數據以及傾斜影像數據,通過數據處理建立三維實景模型。通過實驗驗證所建立三維實景模型的建模精度,為低空無人機傾斜攝影測量后續應用提供廣闊的發展前景。
2 基于低空無人機傾斜攝影的三維模型構建方法
構建低空無人機傾斜攝影測量實景三維模型,首先需采集地面像控點數據以及傾斜影像數據,通過紋理貼圖等過程建立三維實景模型[8]。所建立三維實景模型可有效展示側面紋理信息,側面紋理信息可體現地物屬性,地物地理位置信息利用航空定位定向系統(POS)技術獲取。
2.1 模型構建方案
利用三維實景建模軟件Context Capture實現數據處理以及實景三維建模,該軟件可實現穩定運行[9]。構建實景三維模型首先需采集低空無人機傾斜攝影測量數據,所采集數據通過數據預處理后,利用所獲取數據實施三維實景模型建立,搭建三維實景模型過程如圖1所示。

圖1 三維實景模型搭建過程框圖
選取SIFT特征匹配算法實現影像特征向量匹配,利用所獲取影像匹配結果同名點便于實景三維模型空中三角測量。選取光束法區域網聯合平差實現內業數據處理[10],外方位元素控制點坐標數據以及初始值坐標數據利用像片POS姿態數據完成平差。在此基礎上進行三維重建,通過無人機拍攝多視角圖像后,可以恢復物體和攝像機在實際場景中的位置關系,有助于還原物體真實的三維形狀[11]。
通過低空無人機傾斜攝影測量采集實景不同角度影像,利用紋理映射獲取最佳目標影像于所采集的眾多影像中,目標影像與三角網的配準利用不規則三角網以及影像的幾何關系獲取。將核線影像利用空三解算獲取的外方位元素獲取,核線影像具有較強的立體視覺效果[12]。原始影像與核線影像間坐標變換關系即核線重采樣,采用雙線性內插法實現核線影像重采樣獲取核線影像的灰度值。
2.2 圖像采集
為了構建低空無人機傾斜攝影測量實景三維模型,需要使用低空無人機傾斜攝影技術采集圖像。依據傾斜攝影測量幾何原理可知:
(1)
式(1)中:a與b分別表示相機傾斜角度以及可視角度;h與d分別表示無人機飛行高度以及多視傾斜影像中地物與無人機水平距離最小值;D表示多視傾斜影像中相應地物水平距離最大值。
無人機至瞬時多視影像中心與無人機間的水平距離即水平地面與角平分線交點以及無人機間的水平距離[13]。通過式(1)計算結果,利用角平分線原理可獲取下式:
(2)
無人機傾斜攝影所獲取影像最大比例尺公式如下:
(3)
式(3)中:f表示相機焦距。無人機傾斜攝影所獲取影像最小比例尺公式如下:
(4)
多視影像在低空無人機傾斜攝影拍照瞬間的平均攝影比例尺公式如下:
(5)
經過以上計算過程,實現地面區域的圖像采集。但采集過程中圖像會出現變形,需要對圖像進行進一步處理。
2.3 圖像預處理
低空無人機傾斜攝影拍照過程中容易造成影像幾何變形,需要對所采集圖像實施預處理,消除幾何誤差,提升所建立測量實景三維模型精度[14]。
相機透鏡組出現缺陷將造成徑向畸變,利用平面掃描儀的圖像傳感器獲取運動所形成的平面,結合物方坐標系方程,可以獲得畸變參數,修正徑向畸變表達式如下:
Δxr=x0(k1r2+k2r4+k3r6)
(6)
Δyr=y0(k1r2+k2r4+k3r6)
(7)

攝影過程中出現切向畸變時,將造成像點位移徑向與切向垂直情況。修正切向畸變表達式如下:
(8)
(9)
其中:P1與P2均表示相機鏡頭在低空無人機傾斜攝影過程中的切向畸變參數。
修正電荷耦合器件圖像傳感器(charge coupled device,CCD)面陣變形表達式如下:
Δxf=αx0+βy0b
(10)
Δyf=0
(11)
其中:α與β均表示低空無人機傾斜攝影測量相機鏡頭畸變差修正系數。
修正以上3種畸變完成相機畸變修正,通過式(6)到式(11)可得下式:
Δx=Δx+Δxd+Δxf
(12)
Δy=Δyr+Δyd+Δyf
(13)
通過以上過程實現低空無人機傾斜攝影測量畸變差糾正,完成數據預處理,得到數據建立特征向量。
2.4 SIFT特征匹配算法
為了在三維實景模型中建立特征匹配,需要對所獲取數據建立特征向量進行計算。針對完成預處理所獲取數據建立特征向量,每個特征向量有3個信息:位置,所處尺度、方向,由此可以確定一個SIFT特征區域。分別向SIFT向量L以及全局向量Q賦值128維方向參數以及60維方向參數,SIFT算法特征向量式如下:

(14)
式(14)中,ω表示相對權重因子。
將上述得到的數值輸入全局紋理直方圖中,設存在點(x,y),計算該像素點最大曲率,利用海森矩陣特征值較大的絕對值表示曲率,可得下式:
C(x,y)=F|α(x,y)|
(15)
式(15)中:α(x,y)表示較大的海森矩陣特征值,C(x,y)為曲率圖像。
重疊度U就是重疊部分的面積U重和影像A的原始面積UA之比如下式:

(16)
經過處理圖像可以進一步增加圖像曲率精度。
建立中點為各特征點的對數極坐標,根據曲率圖像,計算所獲取直方圖內相應位置累積曲率值為:
(17)

(18)
式中,q表示角度離散值。
對多攝像頭攝影圖像進行融合,分析圖像數據,將相同數據部分作為目標點,將多圖像融合,得到融合圖像為:
(19)
式(19)中:L為圖像數據數量,P(l)為真實場景,σx傳感器偏移量,實現多圖像融合。
利用加權函數平衡特征向量,采用反轉的高斯函數加權各像素曲率值和角度離散值,獲取權值函數如下:
w(x,y)=1-e-((qx-dxf)2+(qy-dyf)2)/(2φ2)
(20)
式(18)中,φ與(xf,yf)分別表示SIFT局部特征鄰域加權時相同尺度以及特征點位置。
SIFT局部描述子利用加權函數提升鄰域外區域信息展示能力[15],平滑過渡局部區域至全局區域。
歸一化處理全局紋理向量令光照變化更加穩定,歸一化處理式如下:
(21)
式(21)中,Qi為全局紋理向量。
具體利用SIFT算法提取圖像局部特征過程如圖2所示。

圖2 SIFT算法提取圖像局部特征過程框圖
通過以上過程完成三維實景模型建立特征匹配。
2.5 紋理映射
為了獲取三維實景模型紋理映射結果,需要建立以參數化作為目標的曲面。獲取三維物體表面點(x,y,z)與二維紋理空間點(u,v)相應關系即紋理映射。紋理映射可輕松建立以參數化作為目標的曲面。
將隱式方程轉化為參數方程式如下:

(22)
利用以上過程獲取映射關系如下:
(u,v)?(m,n)?(x,y,z)
(23)
在范圍[0,1]間利用一個或2個參數利用求值程序獲取映射結果。通過參數域紋理空間相應關系獲取三維實景模型紋理映射結果。
2.6 雙線性插值方法
雙線性插值擴展存在2個變量插值函數即雙線性插值[16],該方法需實施線性插值至不同方向。
利用貝塞爾公式進行線性插值,中央差分格式處理貝塞爾公式,獲取第二階差分式如下:
(24)
式(24)中:t=(x-x0)/g,g表示格距。y-1、y0、y1、y2均表示相同直線上相鄰點x-1、x0、x1、x2的值,x0與x1間x點的值用y表示。利用貝塞爾插值方法完成實景三維實景模型插值,需分別在x方向以及y方向上實施貝塞爾插值,獲取最終插值結果,完成建立三維實景模型。
3 仿真測試
為驗證所構建低空無人機傾斜攝影測量實景三維模型有效性,選取某房屋作為對象。選取OpenGVS軟件作為本文方法的仿真軟件,該軟件實時三維(3-dimension,3D)圖形開發軟件,具有較高的仿真有效性。將左視、右視、前視、后視以及正視相機搭載于四旋翼無人機中,令無人機低空飛行。低空無人機傾斜測量采用HMJ-00D4000S型四旋翼無人機,將SONY A7相機搭載于無人機中。設置鏡頭航向重疊度為60%,旁向重疊度為30%,低空無人機傾斜攝影測量實景無人機以及相機參數如表1以及表2所示,部分相機曝光點坐標如表3所示。

表1 無人機參數Table 1 UAV parameters

表2 相機參數Table 2 Camera parameters

表3 部分相機曝光點坐標Table 3 Part of the camera exposure point coordinates
從所采集海量低空無人機傾斜攝影所獲取圖像中隨機選取一幅攝影圖像如圖3所示。

圖3 低空無人機傾斜攝影圖像
圖片存在較多的相似區域,3種方法利用映射不同視角采集圖像的特征區域,處理后的圖像如圖4所示。

圖4 處理后的圖像
從圖3、圖4的實驗結果可以看出,文獻[6]方法和文獻[7]方法的圖像處理過程中,圖像處理過于模糊,而本文方法可以較好的處理圖像,因為本文方法對所采集圖像實施預處理,消除幾何誤差,并利用SIFT算法提取圖像局部特征,可以準確完成圖像的處理。說明本文方法使用SIFT算法對圖像局部特征提取更為準確。
3種方法構建的三維實景模型圖像如圖5所示。
圖5所示采用不同方法構建的三維實景模型可以看出,文獻[6]方法和文獻[7]方法所建立模型的紋理貼圖效果較差,其模擬出來的圖片出現不同程度的模糊。而采用本文方法可利用低空無人機傾斜測量建立三維實景模型,所建立模型逼真度高,紋理貼圖效果明顯,色彩鮮明,具有較高的三維模型建立有效性。因為本文方法構建了三維實景模型,可以準確的采集數據,使用SIFT特征匹配算法將采集的數據進一步處理,得到精準圖像。
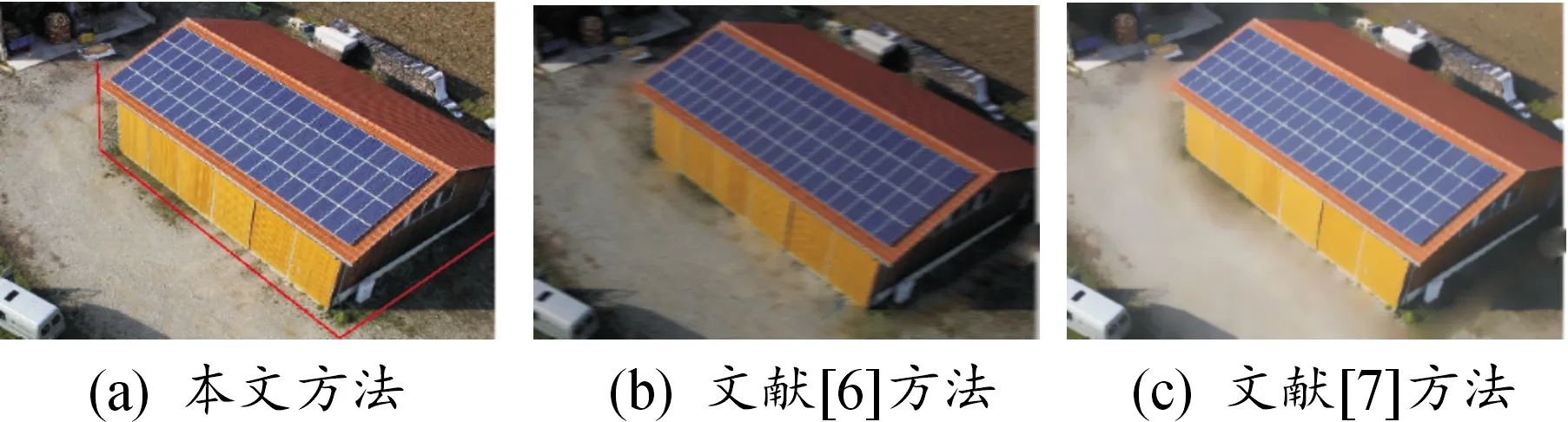
圖5 不同方法構建的三維實景模型圖像
從所建立三維實景模型中選取15個點作為檢查點,獲得檢查點實際坐標與所建立三維實景模型檢查點坐標。為直觀展示本文方法的實景三維模型性能,采用本文方法與文獻[6]方法以及文獻[7]方法所得到的結果如表4所示。

表4 檢查點坐標Table 4 Check point coordinates
選取誤差作為評定本文方法建立三維實景模型精度的評價指標,檢查點實測坐標與模型坐標間的誤差稱之為殘差。誤差計算公式為:
(23)
式(23)中: Δvi、Δwi、Δzi分別為實際坐標與本文方法橫坐標差值、縱坐標差值以及第三維坐標軸差值,n表示檢查點數量。
統計采用3種方法建立三維實景模型各檢查點的誤差如表5所示。

表5 各檢查點誤差Table 5 Error comparison results
表5實驗結果可以看出,采用本文方法所建立三維實景模型各檢查點誤差均低于0.05 m,相比于另2種方法,本文方法具有較高的三維實景模型精度,其模型的最終成果誤差可達到5 cm以內,在目前國家要求的測繪精度中,可滿足影像測量比例尺為1∶500精度要求。因為本文采用了雙線性插值方法,利用貝塞爾插值方法完成實景三維實景模型插值,提高了采集精度。
4 結論
1) 所建立三維實景模型可滿足攝影測量高精度需求。
2) 所建立三維實景模型有效提高了攝影測量技術的生產效率,縮短作業周期,快速獲取地形相關數據。
3) 所建立三維實景模型質量較高,為城市精細化管理、景觀虛擬展示等應用提供動態更新等功能,具有較高的參考價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
