某航炮高吸能變剛度緩沖裝置動力學特性研究
2022-05-09 03:18:42申亞琳
兵器裝備工程學報 2022年4期
田 楠,李 勇,王 凱,申亞琳
(西北機電工程研究所, 陜西 咸陽 712099)
1 引言
后坐力是航炮裝機的重要戰術技術性能指標之一。為了適應現代化戰場需求,要求航炮威力大、射擊精度高的同時還必須后坐力小。航炮威力增大必然導致射擊時后坐力增大,后坐力增大會增加飛機裝載質量、影響飛機操縱性、降低航炮射擊精度和射擊穩定性。而通過合理設計緩沖裝置可以有效減小航炮后坐力。傳統的單剛度彈簧緩沖裝置緩沖周期長,同時在抑制后坐阻力以及保持后坐力穩定性方面存在不足。
目前國內外對緩沖裝置的研究較為深入。其中文獻[6]闡述的是國外一種裝在幻影Ⅲ飛機上與DEFA30毫米航炮配套的機械式高吸能緩沖裝置,此種緩沖器采用了耗能大的摩擦裝置及緩沖簧,而使后坐力有較大幅度的下降;文獻[7]和文獻[8]提出一種轉管炮新型高效緩沖器,其采用具有高效緩沖性能的環形彈簧作為主要彈性元件,使用新型材料金屬橡膠作為主要耗能阻尼材料,該裝置具有較強的阻尼緩沖能力,可大幅度降低轉管炮的后坐力,提高射擊精度;文獻[9]提出了一種剛度可變并帶有阻尼的新型彈簧雙向緩沖裝置并對航炮后坐系統過程進行了動力學建模和仿真,并分析了剛度可變彈簧緩沖裝置中的前置彈簧剛度、后置彈簧剛度、阻尼等對最大后坐力的影響規律;文獻[10]以某小口徑自動炮為研究對象,建立其剛柔耦合動力學模型,通過仿真對比不同射速和不同摩擦阻尼緩沖器參數時對自動炮后坐力影響。
上述工作主要圍繞高吸能或變剛度彈簧開展研究,沒有綜合考慮高吸能和變剛度彈簧同時工作對航炮后坐力控制影響。本文以某航炮高吸能變剛度緩沖裝置為例建立其動力學運動方程,以后坐力最小為目標和緩沖裝置結構參數設計為約束條件對其進行優化設計,并搭建實物臺架對高吸能變剛度緩沖裝置抑制后坐力效果進行研究。
2 高吸能變剛度緩沖裝置結構原理
環形彈簧在工作時由于其特殊的結構特性,接觸表面產生很大的摩擦力,摩擦力會把較大部分后坐能量轉換為熱能釋放到空氣中耗散掉,因此其緩沖減震能力很高。液壓緩沖裝置與彈簧緩沖裝置比較,能承受較大的載荷,吸收更多的能量,并將吸收航炮射擊時的大部分后坐能量轉化為熱能散失到空氣中。因此本文高吸能變剛度緩沖裝置主要以液壓和環形彈簧作為航炮緩沖裝置耗能介質,以環形彈簧和矩形彈簧串聯作為航炮緩沖裝置儲能介質。高吸能變剛度緩沖裝置主要由液壓筒、活塞桿、環形緩沖彈簧、矩形緩沖彈簧、單向活門、復位簧、前連接頭、后連接頭和擋板組成。具體結構如圖1所示。

圖1 高吸能變剛度緩沖裝置結構組成示意圖
前連接頭和身管通過圓柱銷連接,后連接頭通過圓柱銷與搖架連接。航炮擊發時,在火藥燃氣作用下,航炮后坐,固定其上的液壓筒向后運動,推動活塞前腔的液體流向活塞后腔,總共有兩股液體流:一股推開單向活門,經單向活門流向后腔;另外一股經活塞桿內腔流液孔流向活塞后腔。液壓工作同時壓縮環形彈簧,后置矩形緩沖彈簧設置了較為合理的預壓力,且大于前置環形緩沖彈簧的預壓力,環形緩沖彈簧首先被壓縮,此時緩沖裝置表現為單剛度緩沖。當前置環形緩沖彈簧所受壓力大于后置矩形緩沖彈簧預壓力時,擋板開始向右運動,后置矩形緩沖彈簧受壓縮,此時兩級彈簧構成串聯關系,緩沖裝置剛度發生改變,從前置環形緩沖彈簧單剛度變為串聯緩沖彈簧的剛度。航炮后坐能量由液壓阻力耗散和緩沖彈簧吸收,緩沖彈簧的彈簧力是航炮后坐時的主要阻力。后坐過程結束,航炮在緩沖彈簧作用下復進,推動液壓筒向前運動。此時,單向活門在復位簧和液體壓力作用下關閉,后腔液體經活塞桿內腔流液孔流向前腔。復進時,液壓機構產生較大的液壓阻力,用來減少航炮阻振時間。復進開始時,2根緩沖彈簧同時作用,當后置矩形緩沖彈簧恢復預壓位置時,只有前置環形緩沖彈簧作用。復進到到平衡位置后,由于慣性作用繼續前沖,此時前置彈簧恢復預壓縮位置,前置彈簧長度不再變化,只有后置彈簧壓縮,當前沖的慣性運動停止后,后置彈簧由最大壓縮狀態開始伸長,在簧力作用下又返回平衡位置,如此反復形成震蕩。但由于摩擦力的阻振作用和能量的消耗,航炮會迅速的停止下來進行下一發射擊。
3 高吸能變剛度緩沖裝置動力學建模
根據當前緩沖裝置結構的特點和工作過程,建立其動力學模型,主要假設如下:
1) 中間擋板運動過程中質量忽略不計;
2) 彈簧阻尼忽略不計;
3) 不考慮航炮內部機構運動對緩沖性能影響;
4) 假設航炮質心在身管軸線上;
5) 不考慮垂直航炮垂直于后坐方向的運動對緩沖裝置性能影響。
根據以上假設,將航炮緩沖裝置簡化成為一個非線性振動的彈簧-阻尼-質量系統,其所建立的物理模型如圖2所示。

圖2 航炮緩沖裝置物理模型示意圖
航炮緩沖裝置在其連續發射過程振動響應問題最終歸結為非線性有阻尼受迫振動方程。振動微分方程可表示為:

(1)

以航炮初始的質心位置為起始點建立坐標系,規定力的方向向前為負方向;位移離開平衡位置向后為正,向前為負。變剛度瞬間位移和速度連續。
對于非線性受迫振動系統,航炮運動的的微分方程為:
當前置彈簧力小于后置彈簧預壓力時,前置彈簧單獨作用,此時微分方程為:

(2)
當前置彈簧力達到后置彈簧預壓力時,2根彈簧同時作用,此時微分方程為:

(3)

當速度降為零時,兩根彈簧同時作用,由最大壓縮狀態逐漸伸長,此時微分方程為:

(4)
當后置彈簧恢復預壓縮位置,只有前置彈簧作用,此時微分方程為:

(5)

當前置彈簧恢復預壓縮位置,前置彈簧長度不再變化,此時只有后置彈簧壓縮,進行前沖過程,此時微分方程為:

(6)

當速度為零,后置彈簧由最大壓縮狀態開始伸長,此時微分方程為:

(7)


(8)
式中:為炮膛截面面積,為裝藥量,為阻力系數,為彈丸質量,為平均壓力,由經典內彈道模型可以求解不同時刻內平均壓力,為炮口平均壓力(內彈道終點),為后效期壓力衰減的時間常數。
運動方程(2)~(8)可簡寫為:

(9)
式中:

4 高吸能變剛度緩沖裝置優化模型

4.1 高吸能變剛度緩沖裝置約束條件建立
航炮緩沖裝置參數設計需滿足以下要求:
1) 預壓力除能減小后坐力外,還能保證航炮恢復并保持在平衡位置,故在設計時應使預壓力大于摩擦力及全炮在使用過程中承受的過載與本身質量乘積之和。全炮在使用過程中承受的過載一般取(3~4)。

(10)
2) 航炮最大后坐長越大,在其他條件不變時,后坐力較小;但最大后坐長過大會影響供彈機構工作可靠性,一般最大后坐長控制在30 mm以內。
≤30 mm
(11)
3) 航炮射擊全阻振時間應小于其一個工作循環的時間,否則會導致后坐力疊加,緩沖器因過載而損壞。
≤
(12)
式中,為航炮一個工作循環的時間,為0.2 s。

(13)
4.2 高吸能變剛度緩沖裝置優化模型建立
基于構建的優化數學模型,本文選用第二代帶有精英保留策略的非支配排序的遺傳算法(NSGA-Ⅱ)對航炮緩沖裝置參數進行優化。首先對航炮高吸能變剛度緩沖裝置結構設計參數的初始種群進行非支配排序,通過遺傳算法生成第一代緩沖裝置設計參數種群,然后對第一代種群進行交叉變異等操作,得到下一代種群,并將子代和父代種群進行合并,對新生成的種群進行快速非支配排序,選擇生成新的父代種群,最后重復上述操作算流程,直到計算停止。
取航炮后坐力最小為目標函數,優化的數學模型描述如式(14)所示。

(14)
通過遺傳算法,利用Matlab軟件編程得到緩沖裝置結構參數的最優解,如表1所示。
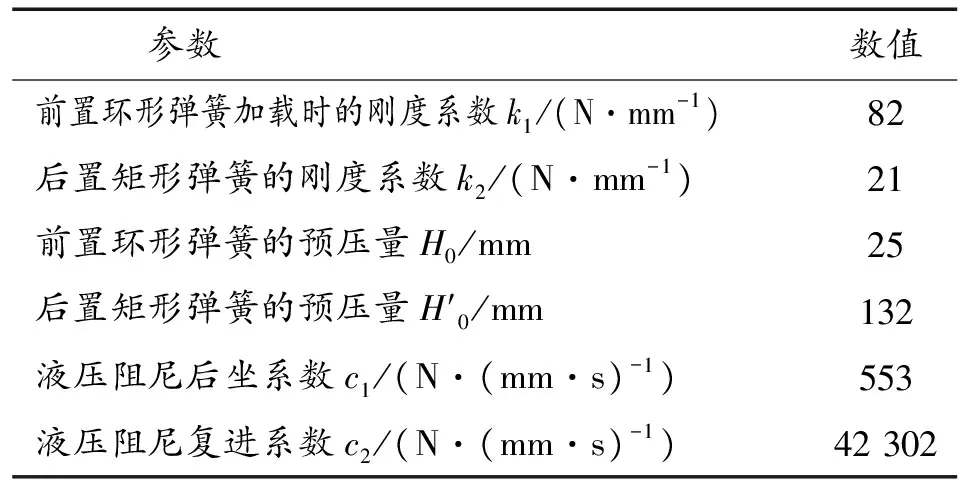
表1 航炮緩沖裝置結構參數優化結果Table 1 Results of structural parameters of buffer device for aircraft gun
5 數值計算與試驗驗證
采用優化后的結構參數進行航炮緩沖裝置的設計,設計的航炮緩沖裝置實物照片如圖3所示。

圖3 航炮緩沖裝置實物照片
搭建試驗臺架,對航炮高吸能變剛度緩沖裝置工作特性進行試驗驗證,將激光位移傳感器直接安裝在剛性支座上,激光點照射在航炮后坐復進零件上,測量航炮后坐位移。將壓電力傳感器直接安裝在緩沖裝置與試驗臺架之間,通過被測件后坐過程中對力傳感器的作用力,測量航炮后坐力。航炮后坐位移和后坐力測試原理如圖4所示。
后坐位移測試現場布置圖如圖5。
后坐力測試現場布置圖如圖6。

圖4 航炮后坐位移和后坐力測試原理框圖

圖5 航炮后坐位移測試驗現場布置圖

圖6 航炮后坐力測試現場布置圖
試驗測試航炮3連發射擊時的后坐位移和后坐力曲線。試驗測試和仿真得到的航炮高吸能變剛度緩沖裝置后坐位移曲線如圖7,后坐力曲線如圖8。在本文后續介紹中航炮高吸能變剛度緩沖裝置簡稱緩沖裝置1,航炮原單剛度普通彈簧液壓緩沖裝置簡稱緩沖裝置2。

圖7 緩沖裝置1測試和仿真后坐位移曲線
由圖7可以看出緩沖裝置1仿真位移曲線和測試位移曲線走勢基本一致,航炮射擊后,首先由平衡位置進行后坐,后坐到位后進行復進,復進到到平衡位置后,由于慣性作用繼續前沖,此時前置彈簧恢復預壓縮位置,前置彈簧長度不再變化,只有后置彈簧壓縮,當前沖的慣性運動停止后,后置彈簧由最大壓縮狀態開始伸長,在簧力作用下又返回平衡位置,如此反復形成振蕩。但由于摩擦力的阻振作用和能量的消耗,航炮會迅速的停止下來進行下一發射擊,一般航炮緩沖器動力學運動基本服從上述規律,只是特征值數值不同。
由圖8可以看出緩沖裝置1測試后坐力曲線和仿真后坐力曲線走勢基本一致。

圖8 緩沖裝置1測試和仿真后坐力曲線
由圖7和圖8得到緩沖裝置1測試和仿真后坐位移和后坐力結果如表2所示。
由表2可以看出仿真后坐位移和測試后坐位移最大誤差為4.4%,仿真后坐力和測試后坐力最大誤差為4.1%。由緩沖裝置1仿真和測試結果可知:所建立的高吸能變剛度緩沖裝置動力學數學模型能夠對其動力學特性進行準確預測。

表2 緩沖裝置1測試和仿真后坐位移和后坐力結果Table 2 Comparison between test and simulation results of recoil force and recoil displacement for buffer device 1
緩沖裝置1和緩沖裝置2測試的后坐位移曲線如圖9,其曲線走勢相差較大。

圖9 緩沖裝置1和緩沖裝置2測試后坐位移曲線
由圖9得到緩沖裝置1和緩沖裝置2試驗測試的后坐位移曲線結果如表3所示。

表3 緩沖裝置1和緩沖裝置2測試后坐位移結果Table 3 Comparison between test results of recoil displacement for buffer device 1 and buffer device 2
由表3可以看出緩沖裝置1測試后坐位移平均值比緩沖裝置2測試后坐位移平均值小4.9%,同時緩沖裝置1測試前沖位移平均值較緩沖裝置2測試前沖位移平均值小60.6%。這是因為緩沖裝置1通過高耗能的液壓和環形彈簧介質把航炮射擊產生的大部分后坐能量吸收,使前沖能量大幅度減少。后坐位移較小有利于提高供彈系統工作可靠性,前沖位移較小有利于提高射擊穩定性。
緩沖裝置1和緩沖裝置2測試的后坐力曲線如圖10。

圖10 緩沖裝置1和緩沖裝置2測試后坐力曲線
由圖10可以看出緩沖裝置1和緩沖裝置2試驗測試后坐力曲線走勢相差較大,其后坐力如表4所示。

表4 緩沖裝置1和緩沖裝置2測試后坐力結果Table 4 Comparison between test results of recoil force for buffer device 1 and buffer device 2
由表4可以看出緩沖裝置1測試后坐力平均值比緩沖裝置2測試后坐力平均值小12.9%,同時緩沖裝置1前沖力平均值較緩沖裝置2測試前沖力平均值小72.3%。這是由于緩沖裝置1把航炮在射擊時的產生的大部分后坐能量被高耗能的液壓和環形彈簧介質吸收,轉換為熱能,使得前沖力大幅度降低。后坐力和前沖力小有利于提高射擊精度。
6 結論
1) 緩沖裝置1測試后坐位移和仿真后坐位移最大誤差為4.4%,測試后坐力和仿真后坐力最大誤差為4.1%,說明所建立的高吸能變剛度緩沖裝置動力學數學模型預測動力學特性準確。
2) 高吸能變剛度緩沖裝置在后坐位移和前沖位移小的條件下比原單剛度普通彈簧液壓緩沖裝置后坐力平均值降低12.9%,前沖力平均值降低72.3%。由于后坐力和前沖力大幅度減小,航炮的連發射擊時的后坐力較為穩定,射擊精度提高。
