認知雷達參數化波形設計
2022-04-27 07:24:28蔡興雨
火控雷達技術 2022年1期
關鍵詞:信號
喬 凱 蔡興雨 董 國 王 旭
(西安電子工程研究所 西安 710100)
0 引言
傳統體制雷達通常以相對固定的工作模式來發射固定的波束、電磁波形式,同時以相對固定的模式來接收處理回波信號[1]。然而,隨著雷達作戰環境越來越復雜,雷達所需探測的地面和空中目標愈加多樣,同時隨著電子戰技術的飛速發展,雷達所面臨的電磁環境也更加復雜,傳統雷達很難滿足現代戰爭對雷達系統的需求[2]。而認知雷達可利用目標和環境的先驗信息,通過算法優化設計發射波形,合理分配雷達發射資源,同時可自適應優化接收處理,實現雷達接收到發射的閉環,能夠很好地提升雷達的探測性能和陣地適應能力。
目前,對于認知雷達的研究主要體現在對認知雷達架構及參數化模型的建立、對認知雷達資源管理調度、對認知雷達關于對環境及目標先驗信息的處理算法這幾個方面[3]。本文則從認知雷達架構入手,對認知雷達架構進行進一步優化,闡述認知雷達參數化理念和參數化的必要性;從雷達方程入手,結合認知雷達一般調度需求,確定參數化波形的結構及具體參數,建立起一個完整的參數化波形,并進行仿真驗證。通過對認知雷達的參數化波形進行建模研究,可有效解決認知雷達在工作時資源調度不全、參數化波形不能很好地表征雷達整體控制的問題;可為雷達資源管理提供支撐,解決雷達資源調度時應該怎樣調度雷達參數的問題;也可為雷達波形庫的建立提供支撐。
1 認知雷達參數化概述
1.1 認知雷達概述
與傳統雷達相比,認知雷達不僅僅是簡單的發射與接收,而是實現了“發射機-綜合電磁環境-接收機-發射機”的自適應閉環處理流程[4]。其不僅接收回波信息來獲取目標信息,還可獲取干擾、噪聲、雜波等綜合環境信息,自適應處理可通過環境信息和回波信息并結合先驗信息來進行運算,決定下一次的發射最優波形和雷達控制參數,形成“發射波形-接收回波-發射波形”的閉環[5]。
1.2 認知雷達架構
認知雷達架構最早由Haykin S教授在2006年提出;之后Haykin在2012年對認知雷達架構進行改進,加入模型庫與波形庫的概念[6];文獻[7]給出了認知雷達的詳細體系架構;綜合文章中的論述,對認知雷達智能調度系統進行詳細設計改進,認知雷達的架構及工作模式如圖1所示。
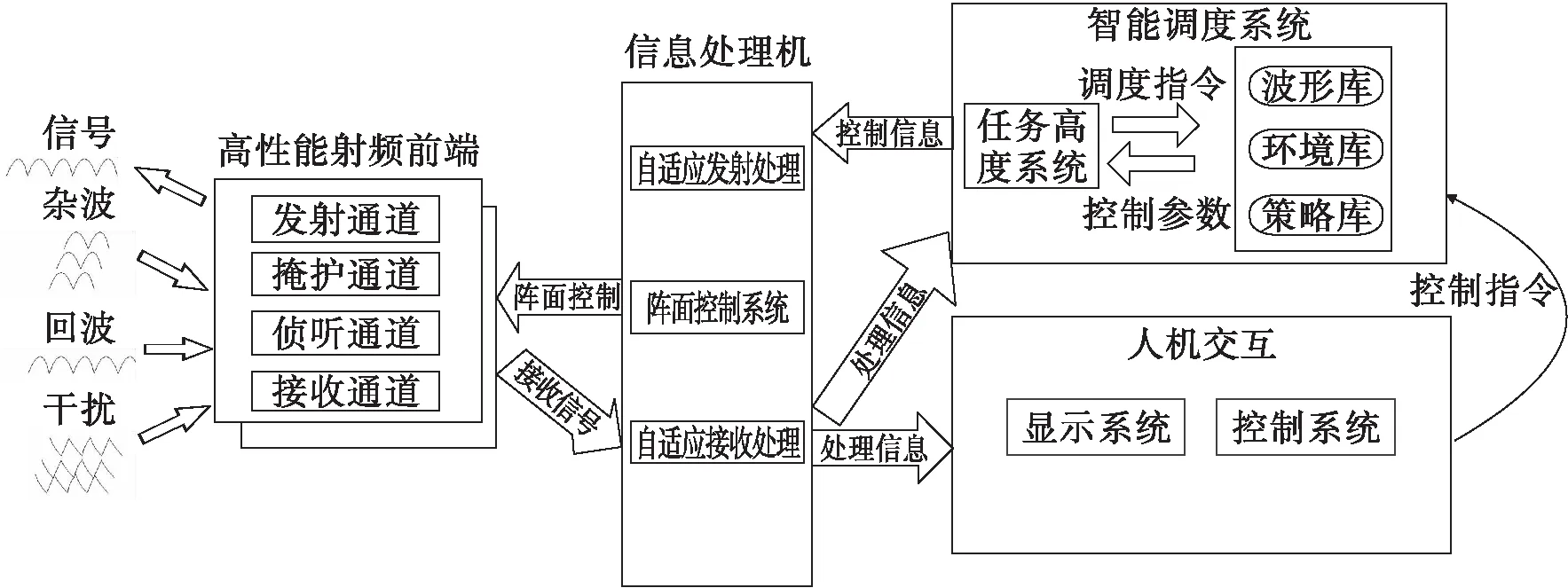
圖1 認知雷達結構及工作模式
圖1中對認知雷達架構進行了詳細的表述,并對認知雷達工作中的信息流進行了簡要表示。雷達根據任務類型初步選擇一系列參數化波形并通過高性能射頻前端發射;接收后根據回波信息進行自適應處理,智能調度系統通過處理后的信息獲取到雷達的周圍環境信息和目標信息,自適應選擇其下一組發射參數和處理參數,并將下一組控制信息發送于信息處理機與前端,進行下一輪發射。雷達操控者也可通過人機交互系統自行選擇雷達的控制參數。
1.3 認知雷達參數化波形概念
參數化即用參數來表征模型[8]。對于雷達來說,雷達參數化即用參數來表征雷達各部分模型,參數化波形即用一系列參數表示雷達所需要控制的各種資源,是對雷達一系列控制參數的描述。雷達通過計算,選擇最優的參數化波形,再通過對參數化波形的實時調度,即可實現不同功能。
參數化波形在雷達資源調度系統中使用,而雷達可調度的資源可分為軟件資源和硬件資源,參數化波形則需要做到在硬件條件滿足的情況下,對雷達所有的參數資源都能描述到,這樣才可最大限度地滿足雷達的靈活性要求。從雷達模塊的角度來說,對雷達資源的描述也可以從前端參數、處理參數、檢測參數這三個方面來描述。從雷達參數類型角度來說,雷達控制參數可從時域參數、頻域參數和空域參數這三個類型來進行描述。

圖2 雷達參數化資源分類
認知雷達中對雷達進行參數控制是十分重要且必要的一環,通過從時域、頻域、空域這三個方面對雷達資源進行描述、對雷達進行控制,可有效實現認知雷達閉環結構中通過判斷回波對雷達的再控制過程,本文之后將從這三個方面對雷達參數產生進行具體分析。
2 雷達參數化波形建模
2.1 雷達基本參數
雷達方程的一種基本形式為
(1)
式(1)表明了雷達最大作用距離與雷達各個參數以及目標特性之間的關系。其中,Rmax為雷達的最大作用距離,Pt為雷達發射功率,G為雷達天線增益設定,λ為波長,σ為目標的雷達截面積,Smin為最小可檢測信號的功率。式(1)中給出了雷達各參數與作用距離的定量關系,但并沒有考慮雷達在正常工作狀態下因環境因素帶來的損耗和誤差。
對于雷達而言,σ和Smin在實際中不可準確估量,但對于參數化波形建模來說,并不需要考慮雷達的實際損耗和不可估量的因素,只需對雷達可控制的參數進行分析建模。而一般情況下雷達發射最大功率一定,發射增益則與雷達天線設置有關,接收機增益一般可控,雷達工作波長則在雷達前期論證時已經確定。則
s(t)={NStc;}
(2)
式(2)中,NStc為雷達的接收增益曲線編號,可對雷達的不同距離段的接收增益進行控制。
2.2 雷達波形分析
雷達發射信號通常為窄帶信號,用復信號可表示為
st(t)=u(t)ej2πf0t
(3)
其中,u(t)為信號的復包絡,f0為載頻。
u(t)=a(t)ejψ(t)
(4)
a(t)為信號的幅度調制,ψ(t)為信號的相位調制項。
對于線性調頻矩形脈沖信號,其信號的表達式為
(5)
其中,T為脈沖時寬,μ=B/T為調頻斜率,B為調頻帶寬。
對于信號接收后的處理過程來說,還需要考慮采樣率、頻域脈沖壓縮時FFT的點數、加窗方式等參數,才可完整地表述一個信號的接收處理過程。
因此,對于一般信號,可對其參數化為
s(t)={T;B;f0;fshift;fs;P;W;}
(6)
其中,fshift為頻偏,采用頻偏則是為了提高雷達抗干擾能力,fs為采樣率,P為脈壓方式,其中可包含脈壓方式、脈壓點數等參數;W為加窗方式。雷達通過DDC、數字采樣等技術,對以上參數進行集成控制,可表示雷達的波形發射與處理的過程,通過改變其中的參數,可改變雷達的不同發射與接收配置。
2.3 時域參數分析
普通脈沖多普勒雷達是通過測量發射信號傳播到目標并返回來的時間來測定目標距離的。雷達對于時域的控制參數可影響到雷達的探測距離、脈沖發射盲區、距離分辨率。一般情況下,在發射信號的PRF確定時的最大不模糊距離為
(7)
其中,fr為雷達的脈沖重復頻率。因此,雷達的脈沖重復周期決定著雷達的最大不模糊距離,在進行雷達設計時,應使其滿足雷達的工作需求。在對其進行控制時,可實時改變雷達的最大不模糊距離,適應其工作模式需求。同時,雷達一般采用多脈沖的發射方式,可控制其脈沖重復數,用Np表示。
對于雷達接收來說,為充分利用雷達前端和處理資源,可設置AD采樣起始時間、AD采樣波門寬度這兩個參數,分別用TADS和TADG表示,控制雷達前端AD采樣的開始與結束時間;設置接收起始時刻和接收波門寬度,分別用TST和TGW表示,可控制雷達后端處理的起止時間。在對參數進行設置時,應充分考慮雷達信號脈寬、雷達作用距離、雷達最大不模糊距離等因素,結合雷達具體需求,對參數進行控制。綜上,雷達時域參數可描述為
f(t)={TPRI;NP;TST;TGW;TADS;TADG}
(8)

圖3 雷達發射接收時序圖
2.4 空域參數分析
方向圖用于描述天線陣列產生的電磁場及其空間內能量分布的情況。其具有指向性,可理解為對相控陣雷達天線輻射的方向性描述[9]。對于平面相控陣天線來說,其水平放置的陣元如圖4所示。各個天線單元排列在平面內的矩形柵格內,整個陣面在XY平面上,共有M×N個天線陣元,單元間距分別為d1和d2,方位角為φ,俯仰角為θ,當天線均勻照射時,其方向圖函數為
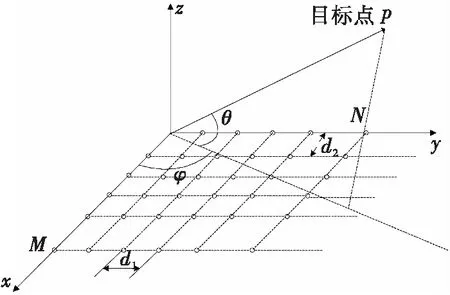
圖4 雷達陣元分布圖
(9)
其中:κ=2π/λ,為波數。
cosαx=cosθcosφ
cosαy=cosθsinφ
(10)
當波束指向為陣列法線方向,即ΔφBα=ΔφBβ=0時,平面陣列的幅值方向圖函數可表示為式(11)。
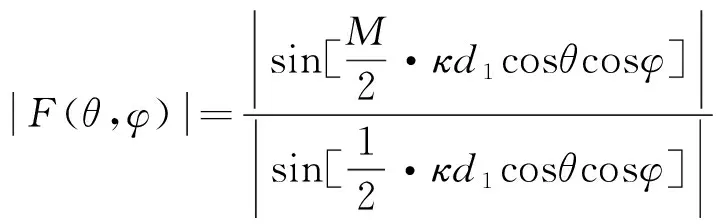
(11)
通常情況下,雷達為了更好地實現兩位相掃,平面相控陣將天線的各個陣元垂直排列在yoz平面內,如圖5所示。
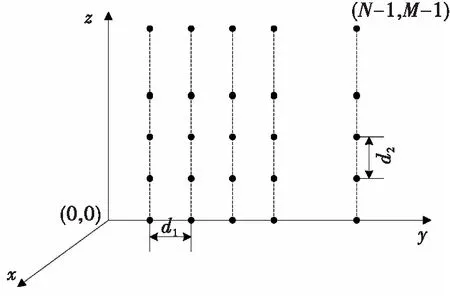
圖5 雷達陣列垂直排列
與式(11)相同,可得到其方向圖函數為
(12)
其中ΔφBα與ΔφBβ分別表示z軸和y軸方向內的陣內相位差。
一般雷達中陣元數與陣元間距固定,波數與波長相關,則方向圖與俯仰角θ和方位角φ相關。通過控制這兩個參數,可控制波束指向與雷達方向圖參數。
雷達在進行波束掃描時,可賦予雷達初始的方位俯仰指向和期望的方位俯仰指向,則可描述雷達波束掃描過程,即雷達空域掃描參數可表示為
f(s)={SIA;SIE;SEA;SEE}
(13)
其中,SIA、SIE為雷達初始方位與俯仰指向,SEA、SEE為雷達的期望方位與俯仰指向。
對于數字陣列雷達,雷達整個陣面的波束結構、波束賦形又可由用戶自由定義,因此,對雷達波束的具體描述可表示為
f(b)={BBS;BFX}
(14)
其中,BBS為雷達的波束結構參數,BFX為雷達的賦形參數,可由用戶自行定義,從雷達參數庫中調用。
綜上,認知雷達的參數化波形可描述為
s(t)={T;B;f0;fs;P;W;TPRI;
NP;TST;TGW;TADS;TADG;
SIA;SIE;SEA;SEE;BBS;BFX}
(15)
其中,脈壓方式、波束結構、賦形參數可預先設置雷達參數庫,當系統需要根據環境配置新的參數化波形時,可僅僅配置其在庫中的編號即可,雷達則根據編號從庫中讀取具體參數。
3 仿真驗證
3.1 信號頻域仿真
對于雷達發射信號,信號形式取線性調頻信號,參數取T=100μs,認知雷達采用DDS,雷達進入前端之前信號通常采用零中頻,取B=2MHz,f0=-B/2,fshift=5MHz,fs=10MHz,發射信號仿真如圖6所示。
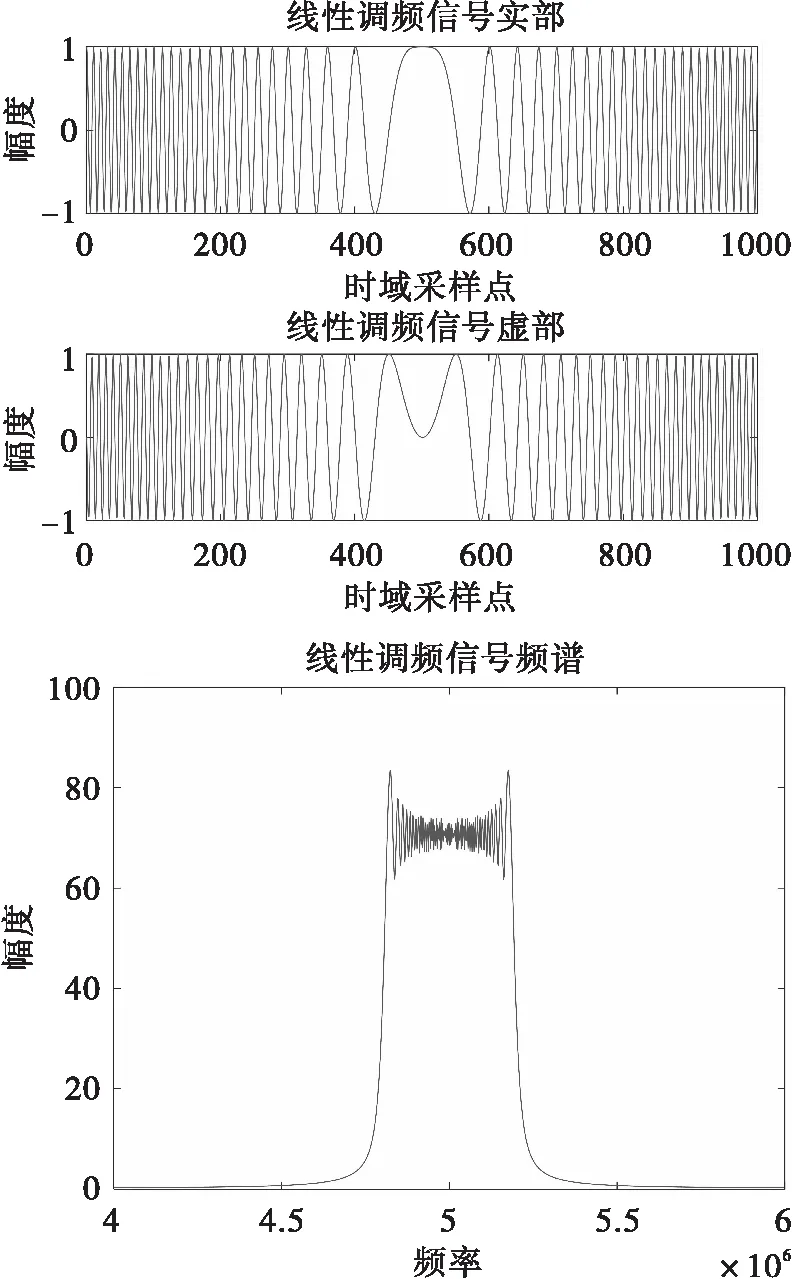
圖6 信號1仿真結果
對于認知雷達來說,發射一種波形很難滿足雷達對于不同距離段、不同任務的探測需求,則可再配置一種波形參數,滿足雷達近區探測需求和抗干擾需求,其參數可設置為:T=50μs,B=2MHz,f0=B/2,fshift=-5MHz,fs=10MHz。
對于接收處理,脈壓方式P=1,脈壓方式為雷達系統自行定義,可包含脈壓方式和脈壓點數等參數。本文仿真中,當脈壓方式為“1”時,脈壓方式為頻域脈壓,脈壓點數為2048點,目標距離R=20km,RCS=1,信號1的回波信號及脈壓結果仿真如圖7和圖8所示。
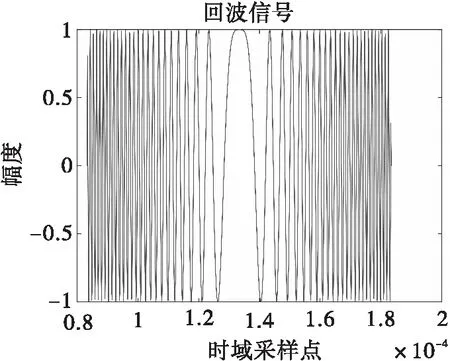
圖7 回波信號仿真圖
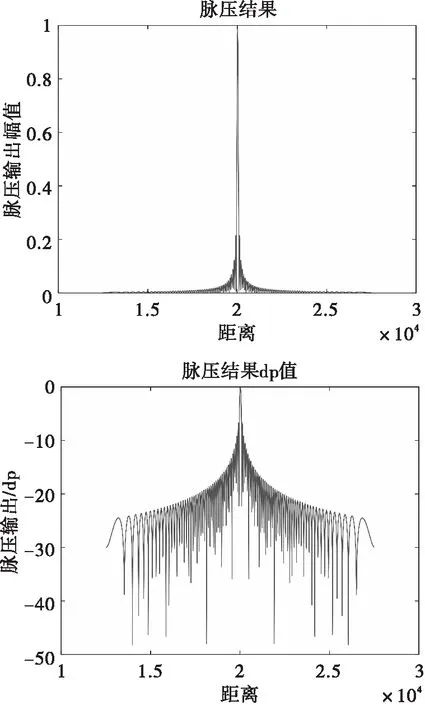
圖8 回波信號脈壓結果
根據接收回波的結果分析,目標在20km處,可根據目標距離對雷達下次發射的波形進行自適應選擇。其參數可設置為:
信號1:T=20μs,B=2MHz,f0=B/2,fshift=5MHz,fs=10MHz,仿真圖如圖9所示。
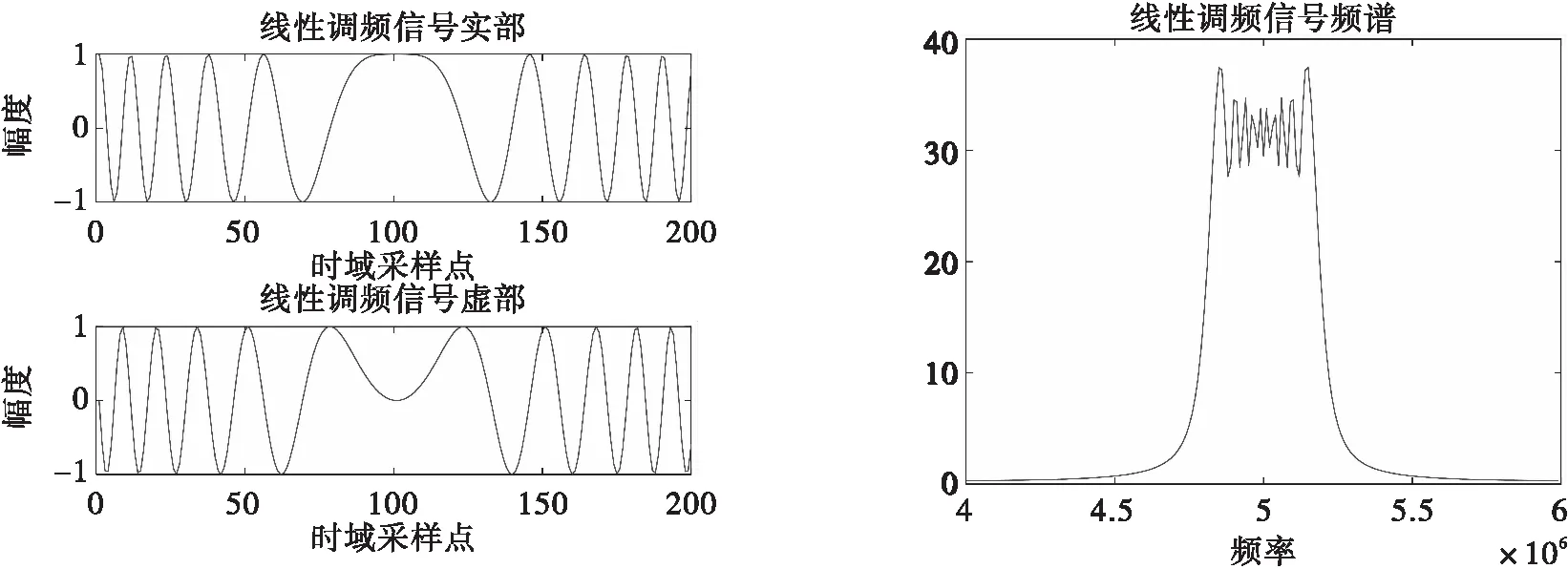
圖9 信號1 仿真結果
信號2:T=20μs,B=2MHz,f0=B/2,fshift=-5MHz,fs=10MHz。
同時也應根據回波信號對雷達的發射時域參數和空域參數進行自適應選擇。本文著重于對認知雷達參數化波形的參數類型進行設計,不再對認知雷達的認知算法及調度后的參數選擇進行深入研究。
3.2 時域仿真
時域上,取TPRI=1000μs,NP=10,根據處理時間,取TST=152μs,TGW=750μs,TADS= 150μs,TADG=850μs,一個脈沖內發射兩個碼片,其時序圖如圖10所示。
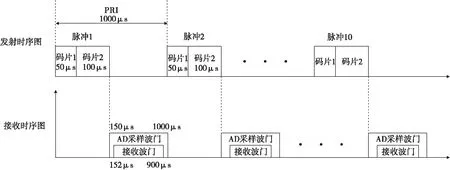
圖10 雷達時序圖
3.3 空域仿真
在空域上,方位俯仰維陣元數都為8,取SIA=0,SIE=0,SEA=30,SEE=30,方向圖掃描范圍為-30°~30°,方向圖仿真結果如圖11所示。
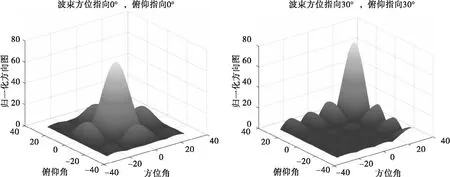
圖11 雷達方向圖
4 結束語
認知雷達是雷達向更加智能化發展的必要階段,對其參數化波形進行研究設計,可有效推動認知雷達的發展。參數化波形可有效對雷達資源進行表征描述,本文對參數化波形進行設計,有效建立起一種全面的參數化波形,對雷達各部分資源進行表征描述,可供雷達進行調度,對雷達資源調度和波形庫的建立有幫助意義,提升雷達的靈活性和可重構性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06