水下多電機協同推進及其動態面反步滑模控制
2022-04-25 05:35:12楊冠軍王偉然閆景昊朱志宇曾慶軍戴曉強
科學技術與工程 2022年10期
楊冠軍,王偉然,閆景昊,朱志宇,曾慶軍,戴曉強
(江蘇科技大學電子信息學院,鎮江 212100)
隨著陸地資源有限與人類過度需求矛盾的日益突出,向海洋發展成為解決這一矛盾的必由之路。探索海洋、開發海洋離不開先進技術的支撐,水下機器人是水下探索的利器,是執行危險深海任務的重要載體。水下機器人工作在淺水區或狹窄復雜水域時會受到湍流的干擾,嚴重的紊流會使水下機器人產生偏航/側翻等問題。高效、響應速度極快的水下機器人多推進電機協同控制可以有效抑制水下干擾,一定程度下消除湍流影響,穩定船體姿勢,為慣性導航、路徑跟蹤、編隊控制打下堅實基礎。
現階段多電機協同控制多用于軌道交通、電動汽車[1]與四旋翼飛行器。文獻[2]將虛擬主軸同步控制(electronic virtual line-shafting,EVLS)與CRH02型高速列車牽引電機系統相結合,實驗結果表明,該方法具有響應速度快、同步性好、適用范圍廣等優點。但是高速列車具有固定軌道,車輛同時受到外部與內在約束從而實現轉向,但是水下機器人僅存在內在約束,遠比軌道交通復雜[3]。文獻[4]針對多電機協調控制同步性問題,提出了基于公鐵兩用車的多電機協同方案,并設計了超扭曲非奇異快速中斷滑模函數,有效地推動了多電機控制方法的進步,但是公鐵兩用車控制聚焦于平面,水下驅動的自由度更高,需要對轉矩分配作進一步的研究。文獻[5]建立了一種雙向電機驅動的四旋翼飛行器動力學模型,分析其雙向推力作用下的運動過程并設計了相應的姿態位置控制器,水下工況的驅動方案與四旋翼極為相似,但是水流黏度遠大于空氣,該方案無法直接應用于水下機器人。
文獻[6]利用改進型交叉耦合結構,設計多變量快速廣義預測控制器,對網絡化的多臺電機完成了比例同步控制。文獻[7]針對EVLS的從動軸電機采用滑模變結構技術(sliding mode control, SMC)設計了伺服單元的滑模速度控制器,結果表明,該方案能有效地降低滑模抖振,獲得較高的同步精度。但在非線性干擾條件下該方案速度響應較慢,難以滿足水下工況復雜下,對多推進電機系統控制的動態性能要求。文獻[8]建立自抗擾模型并整定控制參數,來解決永磁同步電機(permanent magnetic synchronous machine,PMSM)跟蹤精度問題,提升了PMSM在動力推進方面的響應速度等性能。目前,多電機協同的方案主要集中于同速同步控制,以上幾種方法均沒有考慮到多個從動軸給定不同參考速度的異速同步問題。缺少針對水下場景下多電機異速協同控制的研究。
針對以上主要問題,現提出一種應用于水下機器人的改進型EVLS,采用歸一化比例同步系數分配方法來解決水下動力推進復雜非線性的工況問題與傳統EVLS無法實現多電機異速協同的缺點。通過構造EVLS主軸與從動軸輸入端,生成比例實時可調的參考速度以滿足水下循跡時的要求,采用指數衰減轉矩觀測器代替計算轉矩來反饋虛擬轉矩;以反步控制為基礎,引入有限時間濾波器[9]與準滑模tanh()函數設計PMSM推進電機的控制器[10-11];以期這種改進型的EVLS多電機異速協同控制為提升水下機器人的動態響應速度、船體穩定性、推進效率提供理論基礎。
1 多電機協同控制策略
1.1 EVLS多電機協同控制
水下機器人在大幅度路徑改變時對多電機的異速協同有較高要求。EVLS控制通過建立傳動特性與實際機械軸相同的虛擬主軸來模擬實際機械軸[12],將實際從動軸上的負載力反饋給虛擬主軸,通過主軸控制器的計算,使得虛擬主軸與實際從動軸之間實現扭矩平衡。虛擬主軸驅動力矩為
(1)
式(1)中:Tref為虛擬主軸驅動力矩;b為主軸阻尼系數;Km為虛擬主軸的輸入端的彈性參數;ωref為理論設定角速度;ω*為虛擬主軸輸出角速度;t為系統運行時間。其動力學方程為
(2)
式(2)中:Trefi為各實際從動軸電機反饋力矩;以3臺電機為研究對象,則有i=1,2,3;θ*對應主軸的角位移;J為主軸的轉動慣量。
主軸控制器通過反饋調節和速度分配來控制多電機驅動系統的同步運動。傳統EVLS技術只能協同相同轉速的多個電機,因此這里設計一種歸一化的系數分配方法,建立動態異速的多電機EVLS控制方法。同時,水下機器人由于軌跡跟蹤與外部湍流干擾,每個實際從動軸電機需要動態調整,因此其負載轉矩具有時變性和不可測性,使用觀測器替代轉矩計算輸出虛擬轉矩。
改進型EVLS多電機協同控制方案,如圖1所示,該方案由主軸控制、基于歸一化的同步比例系數分配方法、從動軸控制器、電機矢量控制系統4部分組成。
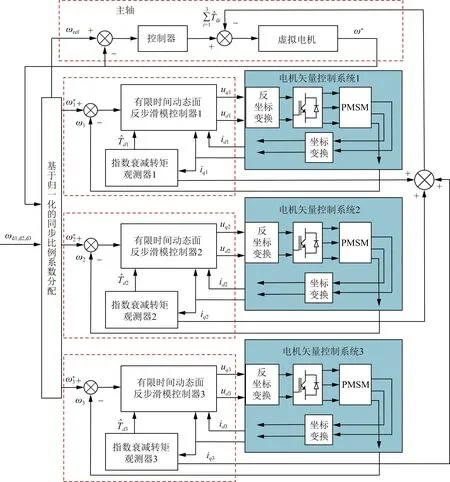
ωd1,d2,d3為各推進電機分解參考轉速;為各觀測器輸出轉矩,代替Trefi;udi、uqi為各電機d、q軸的電壓;idi、iqi為各電機d、q軸的電流;為各從動軸的參考旋轉角速度;ωi為電機實際旋轉角速度
1.2 基于歸一化系數分配的改進型EVLS
為保持船體姿勢,水下機器人需要根據工況實時改變推進電機的速度與推力,從而實現六自由度運動。此時水下機器人各個推進器產生的合推力矢量為
τ=B(β)u
(3)
為推進器輸出的推力矢量;B(β)為推進器的矢量布置矩陣。
將水下機器人各個推進器所產生的單力矢量在體坐標系下進行等效分解,得到單個推進器可以提供的最大縱向、橫向、垂向推力,橫傾、縱傾和偏航力矩。根據螺旋槳轉速與推力的關系建立期望推力分配公式為
τd=Λωd
(4)
式(4)中:τd為六自由度期望分配推力矢量;Λ=diag(k1,k2,k3,k4,k5,k6)為權重對角陣[13];k為各方向的權重系數與放大倍數乘積,根據水下機器人直行、轉向、俯仰的狀態實時改變;ωd為各臺推進電機分解參考轉速。
(5)
經過推力分配的推進器輸出矢量u,歸一化控制的結構如圖2所示。
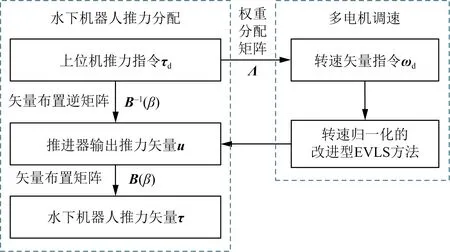
圖2 歸一化控制結構框圖
將水下機器人所有的推進器在體坐標下等效為x、y、z軸水平安裝的3臺推進電機,軌跡跟蹤與抵御外部湍流干擾即可簡化為3臺電機實時轉速控制。根據比例同步要求,定義初始比例系數[14-15]:比較3臺電機的輸入速度,將最高轉速軸定義為ωref,將比例系數最大的電機定義為虛擬主軸轉速參考值。
ωref=max(ωd1,ωd2,ωd3)
(6)
式(6)中:ωd1、ωd2和ωd3為所設3臺電機的分解參考速度。計算3臺電機的比例系數μ1、μ2、μ3,即
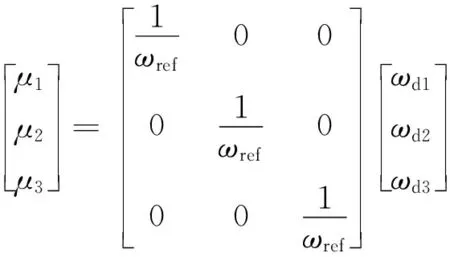
(7)
將傳動比系數與主軸動力學方程[式(2)]結合,得到各從動軸的輸入轉速。經過歸一化計算后各從動軸的參考轉速為
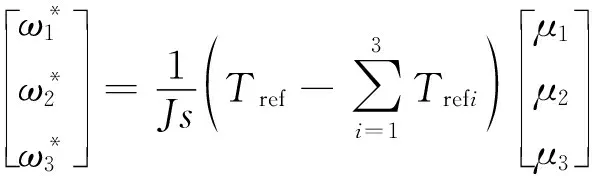
(8)
式(8)中:s為拉普拉斯積分。從動軸的反饋轉矩為
(9)

歸一化的速度控制同時考慮水下動力分配與電機參考轉速給定,實現比例實時可調的異速協同控制。如此,每個從動軸推進電機均能根據水下大幅度轉向動作等實際工況進行異速協同,保證水下機器人在路徑跟蹤與轉向過程中的平滑過渡,實現更快更高效的動作。水文環境復雜時,推進電機會受到強烈的外界隨機非線性的水流干擾,影響電機的同步性與跟蹤能力,因此需要設計抗擾性能較強的單電機控制器。
2 推進電機有限時間動態面反步滑模控制
為提高改進型EVLS的抗干擾性能,基于反步控制設計從動軸推進電機的非線性控制器,以推進電機的數學建模為基礎,將有限時間濾波器于tanh()滑模函數結合來增強系統魯棒性能與收斂速度,結合指數衰減觀測器獲取高精度的實時轉矩數值。
2.1 推進電機數學模型
將改進型EVLS系統中的電機數設定為3,建立永磁同步電機轉子磁場定向控制的數學模型[16],其中任意的第i臺推進電機的電壓方程為
(10)
采用idi=0的控制策略時,電磁轉矩方程為
(11)
第i個PMSM的動力學方程為
(12)
式中:Ldi、Lqi為d、q軸的電感;Ri為定子電阻;pi為極對數;Ji為轉動慣量;Tei為電磁轉矩;TLi為負載轉矩;ψai為交鏈磁鏈。
在使用idi= 0控制的情況下[17],推進電機基于同步旋轉坐標系的運動方程和電壓方程分別為
(13)
2.2 有限時間動態面反步滑模控制器
為提高單電機控制的穩定性,從PMSM系統方程選取狀態變量分解為子系統。隨后給每一個子系統設計虛擬控制律,逐步設計最終得到系統的實際控制律uqi、udi,使整個系統達到期望的性能。
第1步定義第1個誤差變量為

(14)
根據PMSM運動和電壓方程[式(13)],S1的時間導數為

(15)
(16)
式(16)中:l1>0和ε>0為設計參數。
引入快速有限時間收斂的非線性濾波器對虛擬控制信號進行濾波,消除由于對虛擬信號求導而產生的微分膨脹問題。濾波器方程為

(17)

(18)

(19)
第2步定義第2個、第3個誤差變量為
S2=iqi-zf
(20)

(21)

從式(18)、式(20)可以得出:

(22)
根據式(13),S2、S3的導數為
(23)

(24)
定義滑模控制的切換函數為
σ=k1S1+S2
(25)
式(25)中:k1> 0為設計參數。
對σ求導可得
(26)
對于實際從動軸電機[式(13)],構建閉環控制系統,選取Lyapunov函數為
(27)
(28)
則可以后續調節計算參數l2、l3、α、β、k1,使實際從動軸電機系統半全局一致最終有界。引入連續可導的tanh()函數,設計最終實際控制信號為

(29)
(30)
由不等式[11]:

(31)
對于式(31)兩邊在[0,t]內積分,可得
(32)
式(32)中:閉環系統所有信號S1、ez、σ半全局一致最終有界。代入式(29)、式(30),得到為保證推進電機控制系統優異的啟動性能與抗干擾性能所設計的輸出控制量uqi和udi。有限時間動態面反步滑模控制器(dynamic surface backstepping sliding mode controller,DBSMC)關注推進電機的抗干擾性能與系統收斂速度,在保證水下動態響應速度的同時,增強改進型EVLS控制系統的抗干擾性能。
2.3 指數衰減觀測器

考慮到外部水流干擾與動態響應延時所造成的測量誤差,由式(11)和式(12)建立轉矩擴展狀態方程為
(33)

(34)


(35)
在零初始狀態下,選擇性能函數為

(36)
式(36)中:
(37)
當Q<0,有F< 0,‖Δz‖2<γ‖wi‖2適用于任何wi≠0,相當于‖GΔzw‖<γ。求解Q<0,可得到觀測器的干擾抑制增益K。

(38)
如果存在標量α>0令
(39)
假設觀測誤差eε(t0)在t0時刻,可以得
(40)
式(39)中:λ為P矩陣的特征值。當式(38)成立時,標量α表示觀測誤差的指數衰減率。
為進一步提高系統的抗擾動性能,將觀測器的輸出作為估計的集總擾動被饋送到控制器作為補償部分,以增強魯棒性能,式(29)更新為

(41)
由狀態觀測器式(34)可知,結合擾動抑制率K和觀測誤差的指數衰減率α,將其應用于改進型EVLS,直接反饋觀測轉矩,主軸將快速響應較大的負載變化,能更準確地反映從動軸動態關系[18]。
3 仿真實驗
根據PMSM的動力學模型方程,對改進型EVLS控制的多電機系統進行仿真實驗。將水下機器人所有的推進電機分類為主推電機1,功率2.2 kW;側推電機2,功率1.8 kW和升降推進電機3,功率1.5 kW。主軸的轉動慣量J= 0.003 kg·m2。電機采用矢量控制方案,電機具體參數如表1所示。
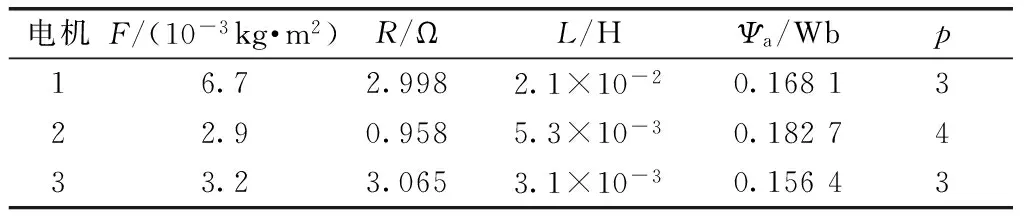
表1 推進電機的參數
根據波浪力與海流干擾公式[19],加入隨機波浪擾動負載來驗證對系統魯棒性的影響,此外電機1、電機3的負載在0.375、0.455、0.85、1.125 s時產生幅度為50%負載變化,模擬較大的瞬時海流干擾,電機2僅設置隨機波浪擾動,如圖3所示。
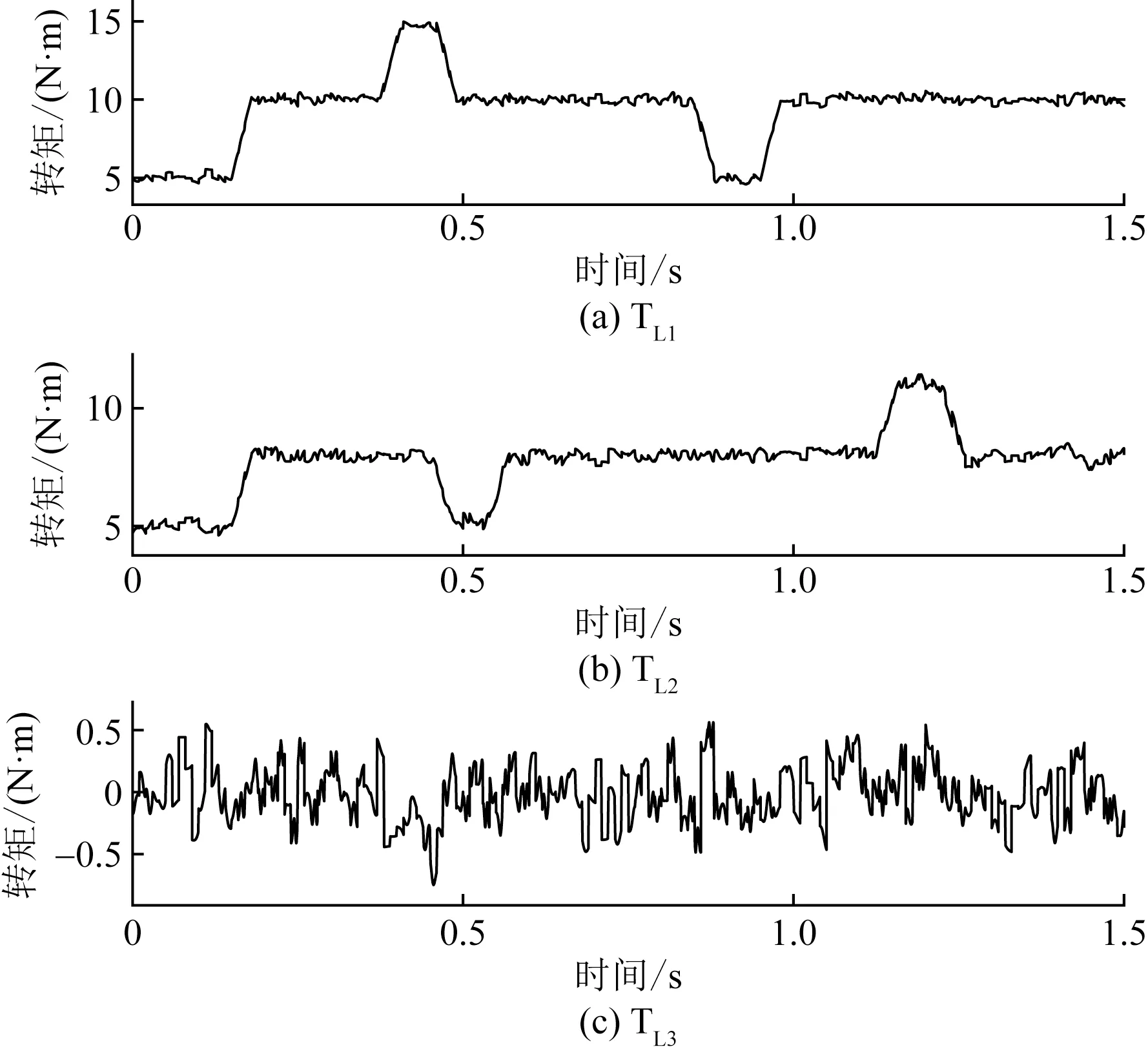
圖3 工況1考慮隨機持續干擾的負載轉矩
將水下機器人設置為直航工況1,電機1的參考轉速設置為1 200 r/min,電機3的參考轉速為800 r/min輔助下潛,此時μ1∶μ2∶μ3=3∶0∶2。多電機比例同步控制系統的速度響應如圖4所示。
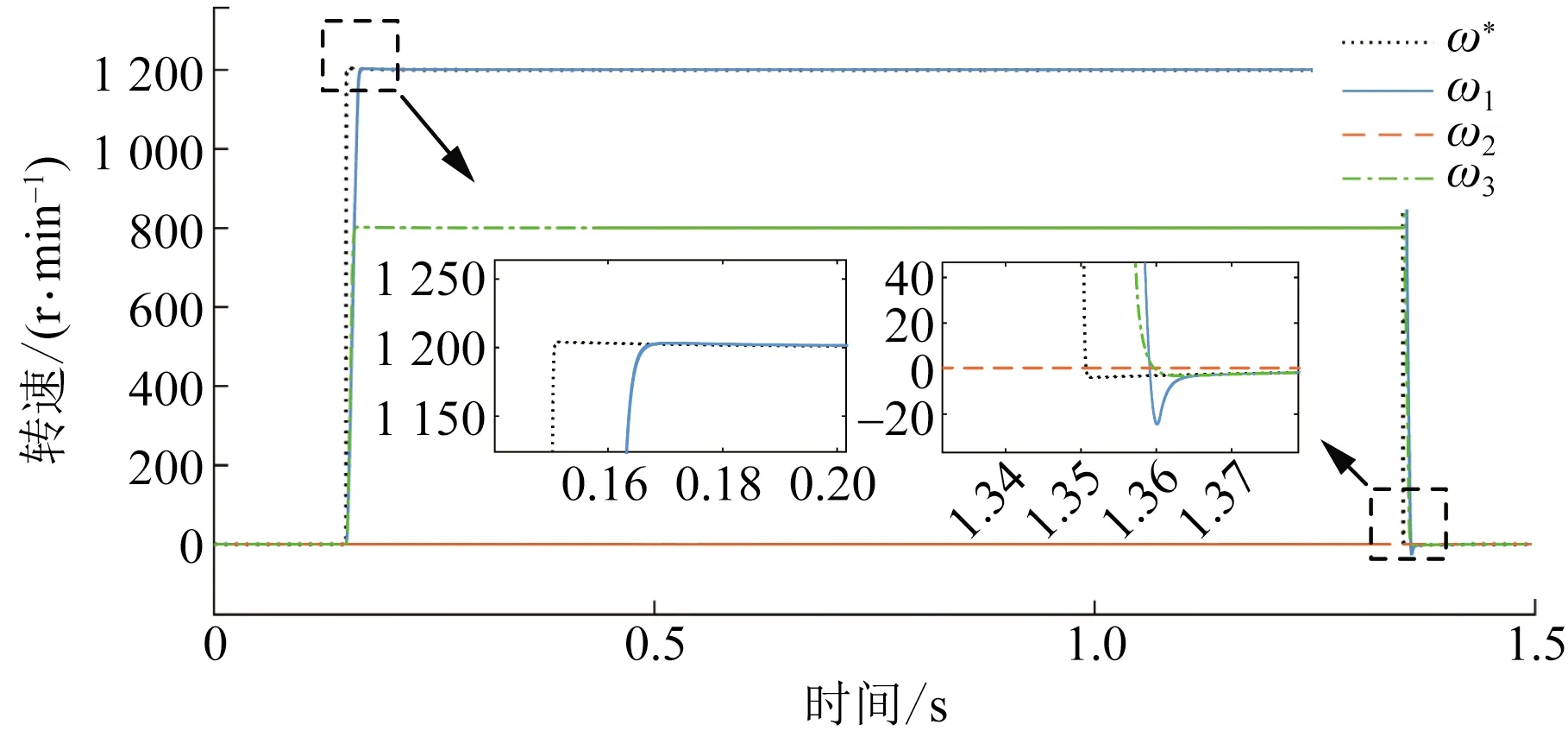
圖4 工況1下DBSMC控制的多電機比例同步轉速響應
仿真結果表明,在歸一化算法的分配原則下,電機1的參考速度計算為1 200 r/min,其他電機與其呈比例關系輸出。改進型EVLS控制下的推進電機的受干擾影響小,啟動時系統穩定時間為0.013 s,負載變化時產生0.29%的超調量。直航時受到水流干擾恢復速度為0.004 s,超調量為0.27%。電機在啟動,直航,停止等工況下運行響應速度快,系統具有較強的魯棒性與穩定性。
驗證比例同步控制的速度切換性能,將3臺電機的參考轉速設置為800~1 200 r/min變化的工況2。循環輸入3臺電機的參考轉速,模擬航向調整時的轉速變化,電機1、電機2和電機3的轉速輸出將顯示比例同步的效果。系統負載加入隨機波浪擾動與海流干擾,如圖5所示。多電機比例同步控制系統的速度響應如圖6所示。
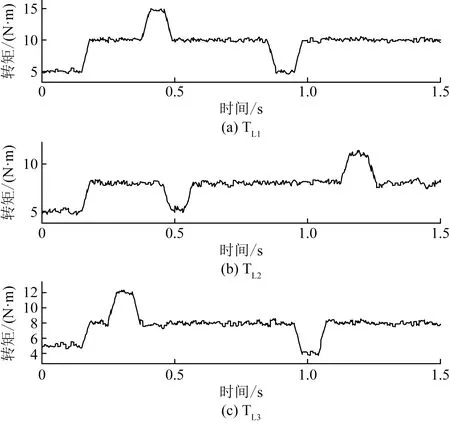
圖5 工況2考慮隨機持續干擾的負載轉矩
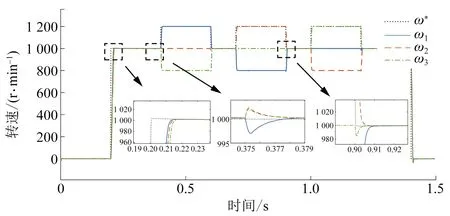
圖6 工況2下DBSMC控制的多電機比例同步轉速響應
結果表明,DBSMC控制的推進電機的穩定時間為0.014 s,負載變化時產生0.3%的超調量,恢復時間0.003 s。DBSMC控制系統在抑制超調和系統穩定速度快,抗干擾性能較強。圖7為各電機之間的同步轉速誤差。DBSMC控制下的3臺電機,誤差消除時間小于0.01 s。結果表明,歸一化方法控制能保證多電機的異速同步過程,DBSMC控制的從動軸電機的同步性能較強。
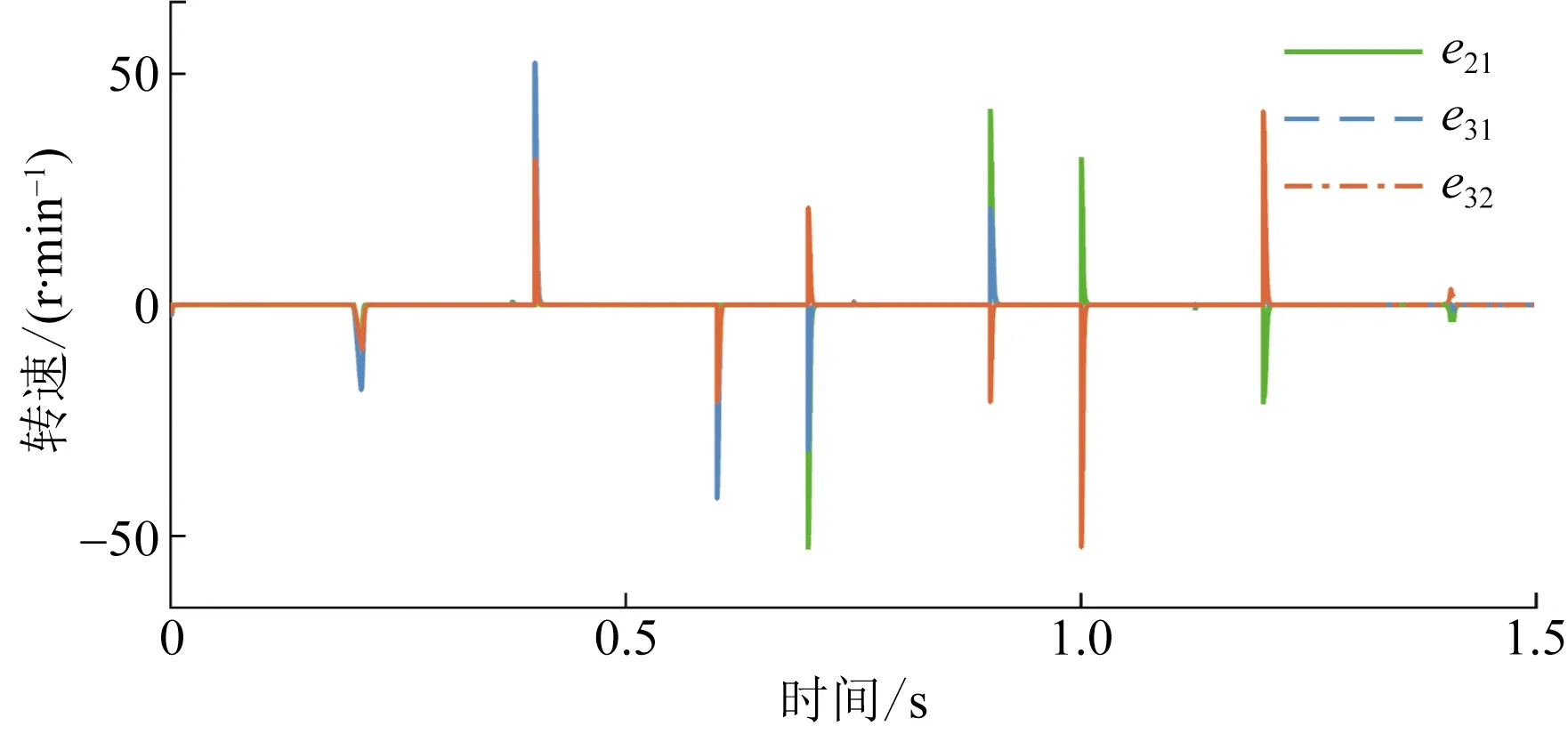
e21為電機1、電機2的轉速誤差;e31為電機1、電機3的轉速誤差;e32為電機2、電機3的轉速誤差
對比文獻[10]中的SMC方法與本文提出的DBSMC方法,驗證控制方法的有效性,給出步進從800 r/min到1 000 r/min再到1 200 r/min時的電機參考轉速跟蹤,如圖8所示,添加的隨機干擾與圖4電機1相同。
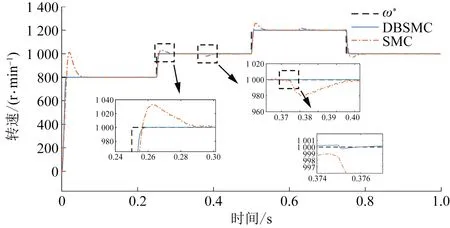
圖8 PMSM速度響應曲線
當參考轉速發生變化時,SMC控制下的推進電機的超調量達到4.9%,穩定時間為0.055 s;在連續波浪擾動下,電機轉速波動較大,負載變化時產生1.5%的超調量。DBSMC控制系統的穩定時間為0.012 s,無超調量。DBSMC控制系統對持續擾動有很好抑制效果,負載轉矩較大變化時轉速0.01 s內恢復。
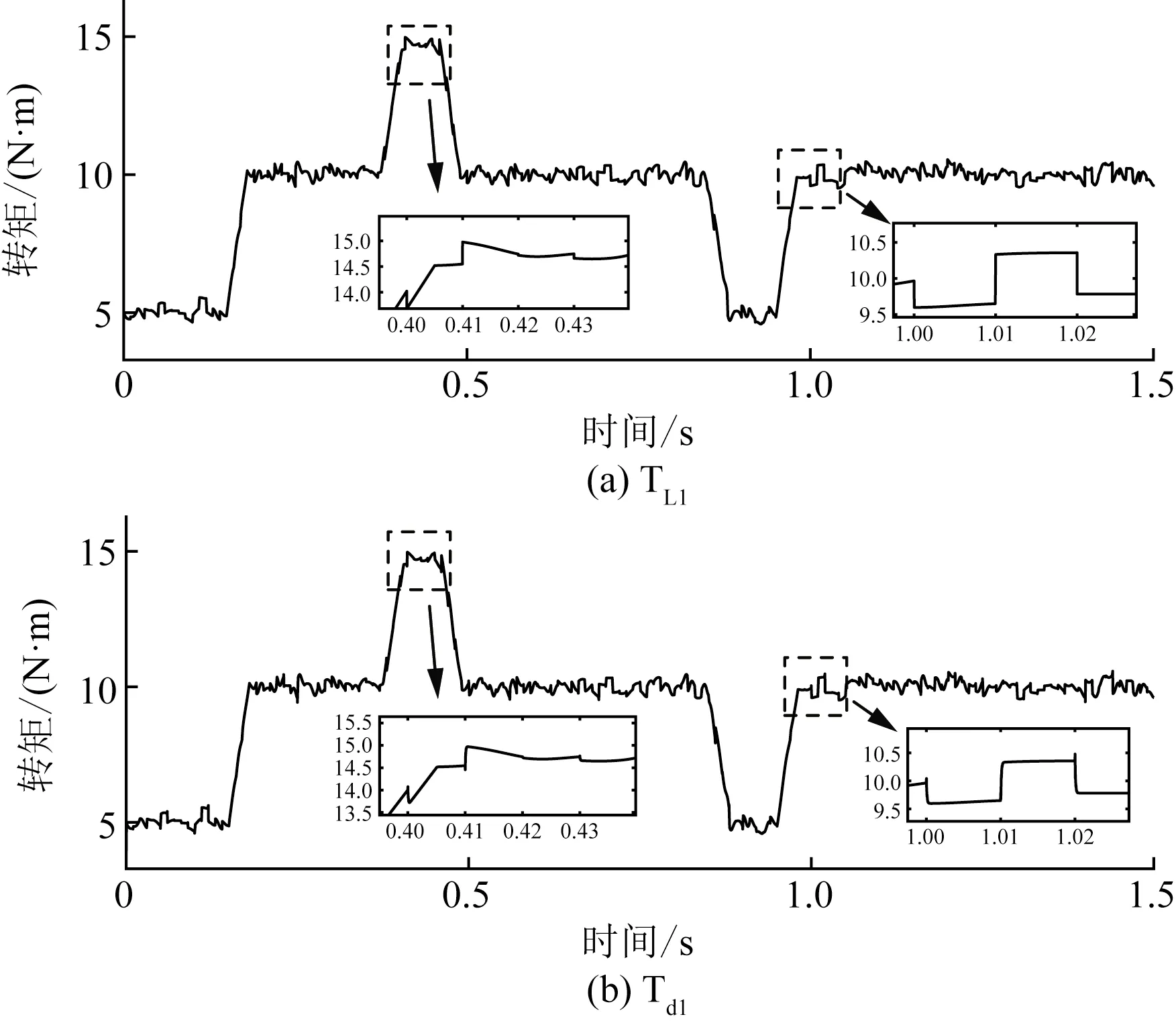
圖9 指數衰減觀測器的轉矩觀測波形
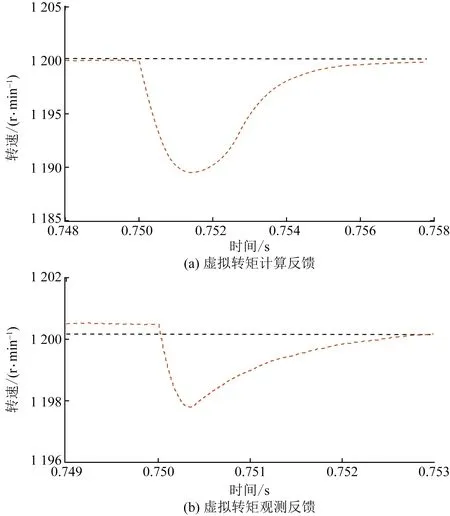
圖10 主軸反饋控制下的推進電機轉速
圖10(a)是從動軸計算轉矩反饋下的電機的轉速,當0.75 s負載轉矩發生較大變化時,轉速下降0.8%。圖10(b)是有觀測器反饋轉矩的電機轉速,轉速下降0.16%。轉矩前饋補償也進一步增強電機轉速的控制性能和抗干擾性能。
4 結論
將多電機比例同步控制技術應用于水下機器人動力推進領域,以多電機推進模型為對象,對其建模與控制進行了研究。
(1)分析了基于EVLS的多電機模型,設計了歸一化比例同步分配方法改進EVLS結構,使其更適用于水下動力推進控制。
(2)為消除復雜水域波浪對推進電機的影響,設計了DBSMC,有效提升了推進電機的轉速跟蹤性能與抗干擾性能。
(3)引入了指數衰減轉矩觀測器,保證數據實時更新的同時兼顧估算精度,從而提高主軸響應速度,增強系統的抗干擾性。
(4)與傳統的EVLS方法相比,基于改進型EVLS的DBSMC使控制系統擺脫了單一同步控制的局限性。仿真結果表明,該方法在連續不確定擾動條件下具有較強的魯棒性,為多電機水下推進的進一步發展提供了新的思路。
