基于車輛軌跡數據的急減速駕駛行為判定方法
2022-04-25 06:06:26王偉趙琦王力李子悅
科學技術與工程 2022年10期
王偉,趙琦*,王力,李子悅
(1.北方工業大學城市交通智能控制技術北京市重點實驗室,北京 100144;2.北京智駕出行科技有限公司,北京100044)
車輛在行駛中常因前方特殊狀況或駕駛員自身操作等原因發生急減速等危險駕駛行為,而這種行為對交通安全會產生較大影響。因此,面向這種行為展開其特征識別、發生規律等的研究對于交通安全具有積極意義。隨著各類型車載終端的普及,已有多種基于車輛行駛軌跡數據的危險駕駛行為判定方法和技術得到了應用。
馬聰[1]利用車載自動診斷系統(on board diagnostics,OBD)設備收集車輛數據,采用固定閾值方法判定急減速駕駛行為,分析車輛行駛的穩定性。廖海林[2]使用智能駕駛記錄儀記錄急減速次數并作為駕駛行為評估模型的影響因子。任慧君等[3]使用擁擠道路上公交車的軌跡數據,根據閾值記錄急減速行為的距離、時長、次數。以上方法使用最常見的利用減速度閾值-3 m/s2做單次判斷,該方法較為簡單但未對不同情況作出區分。丁琛[4]建立急減速駕駛行為識別算法,可判斷連續急減速行為的次數、距離。張雅楠等[5]分析不同的駕駛速度并提出相應的加速度判定方法。以上方法針對連續急減速進行算法設計,且針對不同的駕駛速度設定了不同閾值,能在一定程度上適應不同的駕駛情況,但對具體駕駛場景未做區分。Nassar[6]詳細闡述了危險駕駛行為與速度、駕駛狀態和路況有直接關系。孫川等[7]建立了車輛數據、減速行為和道路安全的關聯機制。Sayed等[8]提出道路環境、車輛狀況、注意力會影響駕駛員做出危險駕駛行為。以上文獻對影響危險駕駛行為的因素進行了分析,但未建立適當的模型。
上述這些方法的判斷依據大都來自于歷史交通事故數據,研究者通常選取車輛的減速度數據作為固定閾值,根據是否超出閾值來判定是否發生急減速行為。該方法忽略了駕駛場景、狀況,缺少必要的分析及建模過程,無法展現不同場景的駕駛狀況變化。由此可見,目前的急減速駕駛行為判斷方法仍存在許多不足。
因此,現基于車輛行駛軌跡數據,建立一種包含不同駕駛場景的急減速駕駛行為判斷方法;使用判斷模型分析駕駛場景對應的駕駛狀況及參數,根據不同的車輛速度,確定具體的急減速數值;與使用聚類分析的實際急減速數據進行比較并確定其可行性,更好地實現基于軌跡數據的車輛急減速行為識別,以期為車輛駕駛安全研究提供理論基礎。
1 車輛行駛軌跡數據及駕駛行為分析
1.1 車輛行駛軌跡數據
所使用的車輛行駛軌跡數據來自北京市路網范圍內,數據來源于北京智駕出行科技有限公司的車聯網數據平臺。該平臺在北京的樣本車輛約為1 000輛,可提供樣本車輛的實時車輛行駛軌跡數據。該平臺所使用的車載OBD終端為智駕盒子(Y-Box 400)。
平臺主要數據字段包括:車輛編號、時間、經緯度、速度、加速度等(表1),數據檢測頻率為每秒1次。經過分析,該頻率可應用于駕駛行為判斷。所使用的數據來自該平臺在北京的數據樣本,數據收集時間為2019年6月。
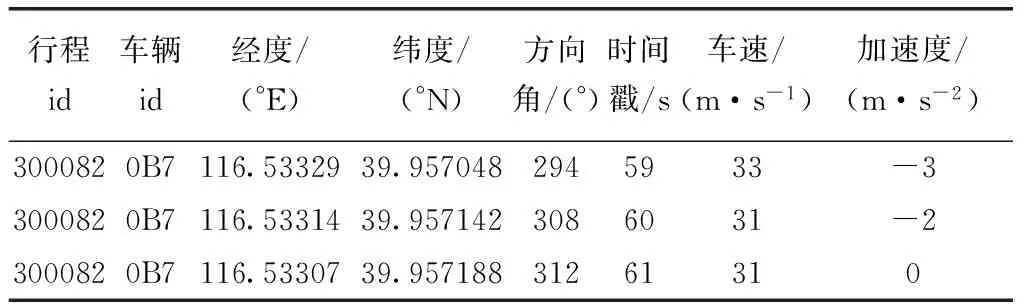
表1 數據類型
由于車載OBD終端設備可能存在的問題,原始數據中會摻雜一些無用數據、錯誤信息,需使用SQL Server數據庫軟件對原始數據進行篩選處理,流程如圖1所示。
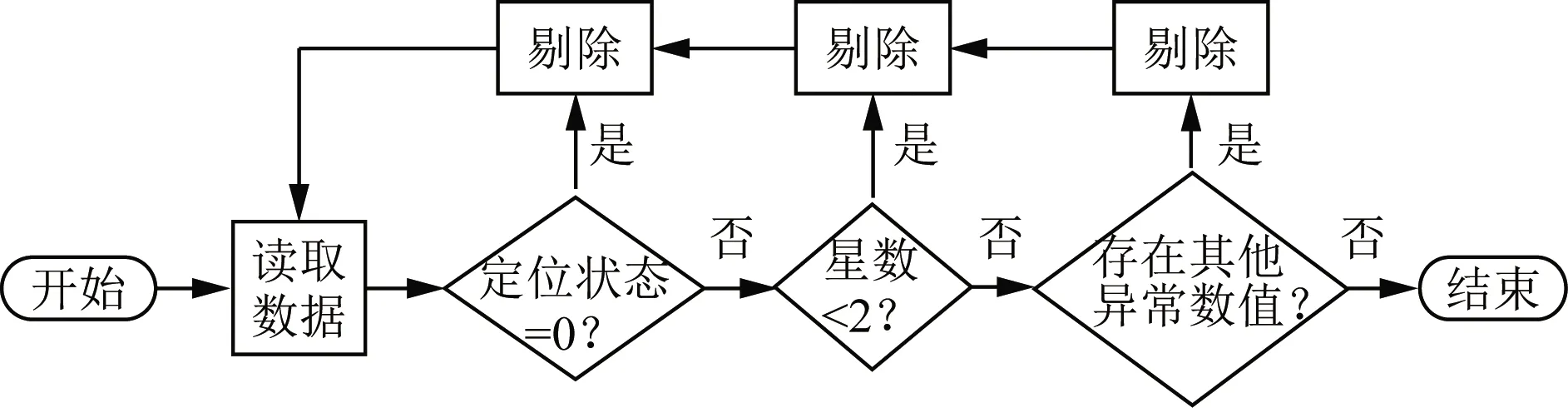
圖1 數據處理流程
1.2 減速行為分析
車輛在行駛過程中所發生的急減速行為通常分為兩種:主動急減速行為及被動急減速行為。主動減速屬于駕駛員主觀意愿,不在本文研究范圍內;被動急減速行為是車輛在跟馳過程中由于前方車輛發生減速,而被迫采取減速措施保持安全距離的行為。本文使用的車聯網數據平臺目前所采用的急減速行為判斷方法為:利用固定閾值判斷法對車輛瞬時加速度(閾值為-2.78 m/s2)進行識別,當加速度小于該閾值時即判定為車輛急減速駕駛行為狀態。但該方法僅考慮車輛的加速度,忽略了絕對速度和反應時間等參數與急減速行為的關系,故使用該方法進行急減速行為判斷是存在問題的,這一問題可借助跟馳模型進行解決。
跟馳模型主要從速度變化和車輛動力特性來描述跟車狀態,加速度值可通過行駛速度、反應時間、兩車間距離、制動時間等參數進行計算,故研究跟馳模型可以了解影響急減速駕駛行為的因素。但該模型較少考慮交通場景和駕駛特性對跟車過程的影響,實際上當上述因素發生改變時,駕駛員往往做出不同的反應。影響急減速駕駛行為的因素大致可分為:場景因素和自身因素。車輛在正常場景下行駛,自身因素中駕駛速度影響較大,不同駕駛速度會導致不同的急減速情況;車輛在非正常場景下行駛,則場景因素主要影響急減速駕駛行為。
所以,要研究車輛發生急減速駕駛行為的場景,應從跟馳模型入手,再對場景因素和駕駛速度進行深入分析,研究其對急減速駕駛行為的影響方式。
2 基于安全距離的跟馳模型
跟馳模型按照模型原理可分為刺激—反應模型和安全距離模型,本文選擇安全距離模型,主要側重于汽車跟隨和制動過程。如圖2所示,前車2與后車1同向行駛。遇到緊急情況時,前車2緊急制動后停到虛線位置;后車也進行緊急制動以應對前車狀況,最后兩車到虛線位置停止。

Lf為后車制動行駛距離;Ll為前車制動行駛距離;L為制動后后車與前車保持的距離;Ls為行駛安全距離
各距離的關系為
Lf=Ls+Ll-L
(1)
(2)
式(2)中:vl為前車制動前的行駛速度;tl為前車制動時間;al為前車制動減速度[9]。
當后車駕駛員發現前車燈亮起時隨之進行制動, 直至停車需要經過4個階段[10]:駕駛員反應時間tr、車輛制動協調時間tb、制動力增長時間tu和持續制動時間tc。可表示為
(3)
式(3)中:Lr為后車在駕駛員反應時間內的制動行駛距離;Lb為后車在車輛制動協調時間內的制動行駛距離;Lu為后車在制動力增長時間內的制動行駛距離;Lc為后車在持續制動時間內的制動行駛距離;vf為后車制動前的行駛速度;vl為前車制動前的行駛速度;al為前車最大制動減速度;tl為前車制動時間。
根據上述過程,將跟馳過程各距離關系進行具體分析,將式(2)和式(3)代入式(1),得
(4)
3 改進急減速模型及場景因素分析
影響行為的場景因素中:照明條件變化后會影響駕駛員的注意力、判斷力及反應時間;不良天氣對駕駛影響程度較大[11],會改變道路行駛條件,降低能見度;而車輛行駛在不同速度時,制動距離也有較大變化。因此照明條件、不良天氣、道路車速這3個因素的影響程度最大,因此本研究選取這些因素來分析駕駛場景。
3.1 照明條件
照明條件的變化會對駕駛員的反應時間造成較大影響。現有研究[12]證明,駕駛員在不同危險條件下的制動反應時間平均值在1.02~1.36 s,取1.02 s,但在低速時,反應時間通常約0.7 s。夜晚不同時段駕駛員反應能力不同,以白天09:00—10:00的反應時間為參考值1,將夜間(18:00—6:00)分為4個時段[13]。根據覺醒水平曲線的日變化特征,得出4個時段的反應時間相對覺醒水平,作為反應時間的修正系數,如表2所示。
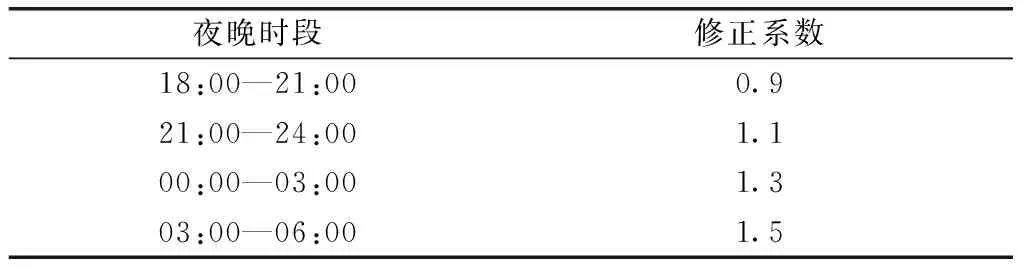
表2 夜晚反應時間的修正系數
故后車駕駛員反應時間為
tr=trbmrt
(5)
式(5)中:trb為駕駛員基本反應時間;mrt為夜晚對反應時間的修正系數。
3.2 不良天氣
降雨對駕駛行為特征有顯著影響[14],包括車速、反應時間等。文獻[15]通過分析得出:當車速小于60 km/h時,一般程度降雨會使車速降低4.4%;當車速大于60 km/h時,該值變為5.8%。該天氣對駕駛員反應時間的修正系數一般取1.47。
tr=trbmrs
(6)
vf=vfbmvw
(7)
式中:mrs為不良天氣對駕駛員反應時間的修正系數;mvw為不良天氣對車速的影響系數;vfb為后車制動前的基本行駛速度。
降雨也影響路面狀況,改變路面的附著系數,正常瀝青道路為0.8,積水系數為0.5[16]。
分析附著系數對汽車動力影響后,可得
al=gφ
(8)
式(8)中:al為前車最大制動減速;g為重力加速度;φ為路面附著系數。
3.3 道路車速
根據相關資料[17],當車速大于40 km/h后,速度每提升10 km/h,駕駛員反應時間約增加0.1 s,當速度增加至100 km/h后反應時間變化不明顯。
以此可設定:
(9)
式(9)中:trb為基本反應時間,車速小于40 km/h時取0.7 s,其余取1.02 s。
3.4 急減速判斷模型
本文所提出判斷模型采用的是依靠車輛行駛軌跡數據的判斷方法,主要考慮的是照明條件、天氣和駕駛速度3個參數。
確定模型中的一些固定參數,制動后后車與前車保持的距離L范圍為2~5 m;車輛制動協調時間tb一般為200 ms;制動力增長時間tu一般為150 ms,故tb+tu/2=0.275s。
通過轉換公式[式(4)],給出跟車模型中后車減速度、速度等變量之間的關系:
(10)
在單車道中行駛的車隊,前后車保持跟馳過程,其車速在一定范圍內浮動,保持一致,故將前、后車車速綜合為車隊速度v考慮,從而使vf=vl=v,而基本行駛速度vfb變為vb。則減速度表示為
(11)
4 實例驗證
4.1 急減速數據篩選
建立急減速駕駛行為判定方法后,需要驗證該方法的可行性及精度。從平臺的現有樣本數據中篩選出急減速數據,數據特性主要包括急剎車至速度為0的數據(停車),急剎車后車輛速度浮動較小持續行駛的數據及其他情況,篩選數據所屬場景包括白天、夜晚、晴天、降雨等。利用上文所建立的判定方法,計算不同場景下的急減速閾值,最后利用實際數據進行驗證并與現有方法進行比對。
選擇聚類算法對數據進行篩選,采用速度-加速度作為數據點。基于密度的噪聲應用空間聚類算法(density-based spatial clustering of applications with noise,DBSCAN)是基于密度的空間聚類,聚集高密度點并標記低密度離群點,適用于行駛軌跡數據。該方法能夠區分急減速數據與正常數據,并得到實際急減速駕駛行為閾值,能用于驗證本文方法的準確性。DBSCAN的關鍵參數鄰域半徑ε和鄰域最小點數MinPts的取值由多次試驗后確定。
針對不同場景進行數據歸類,包括白天無雨、白天降雨、夜晚無雨和夜晚降雨。使用歷史數據中的時間信息區分白天、夜晚,其中18:00—06:00時段為夜晚數據;使用平臺中的天氣信息及降雨范圍進行定位,區分降雨數據。共篩選出6萬余條急減速數據,如圖3所示。
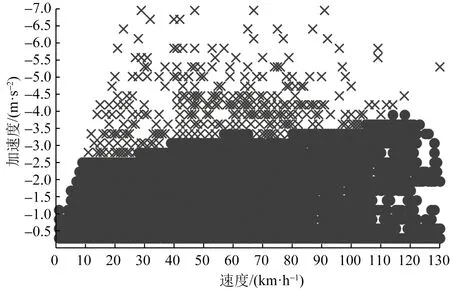
圖3 白天降雨場景的聚類分析結果
4.2 計算結果與對比
使用急減速判斷模型的急減速閾值計算結果與實際數據進行對比驗證,從多種不同駕駛場景中選取白天降雨、夜晚降雨場景,上述場景包含了主要影響急減速行為的3種因素。急減速閾值根據式(11)進行計算,式中各參數根據不同駕駛速度及場景進行確定。本文判斷的是該模型的誤差水平,選取平均絕對誤差(mean absolute error,MAE)、平均相對誤差(mean relative error,MRE)、均方根誤差(root mean square error,RMSE)等統計變量為指標。
4.2.1 白天降雨場景
該場景的部分參數組合如表3所示,所使用的參數中:駕駛員反應時間在低速時(0~40 km/h)不變,在高速時(40~100 km/h)逐漸增加,安全距離、制動時間等也隨車速提升而增加。
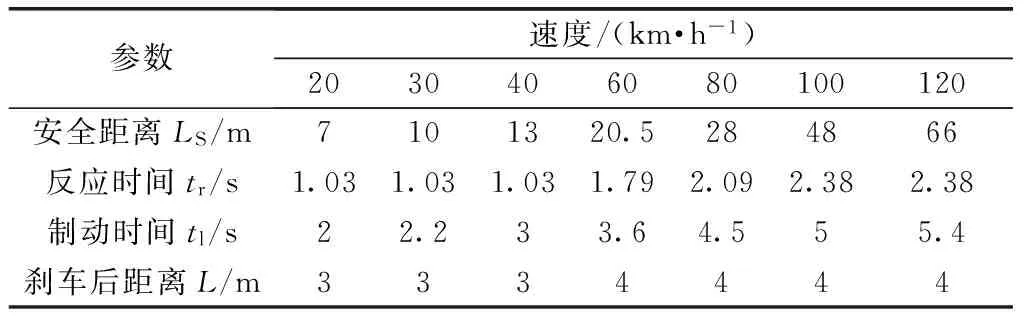
表3 白天降雨場景部分參數
圖4為白天場景的急減速數值分布情況。由圖4可知,降雨時模型計算數值相較無雨時降低,低速時(10~40 km/h)平均降幅較大。降雨天氣下,行駛安全距離、反應時間和制動時間等參數會發生變化。
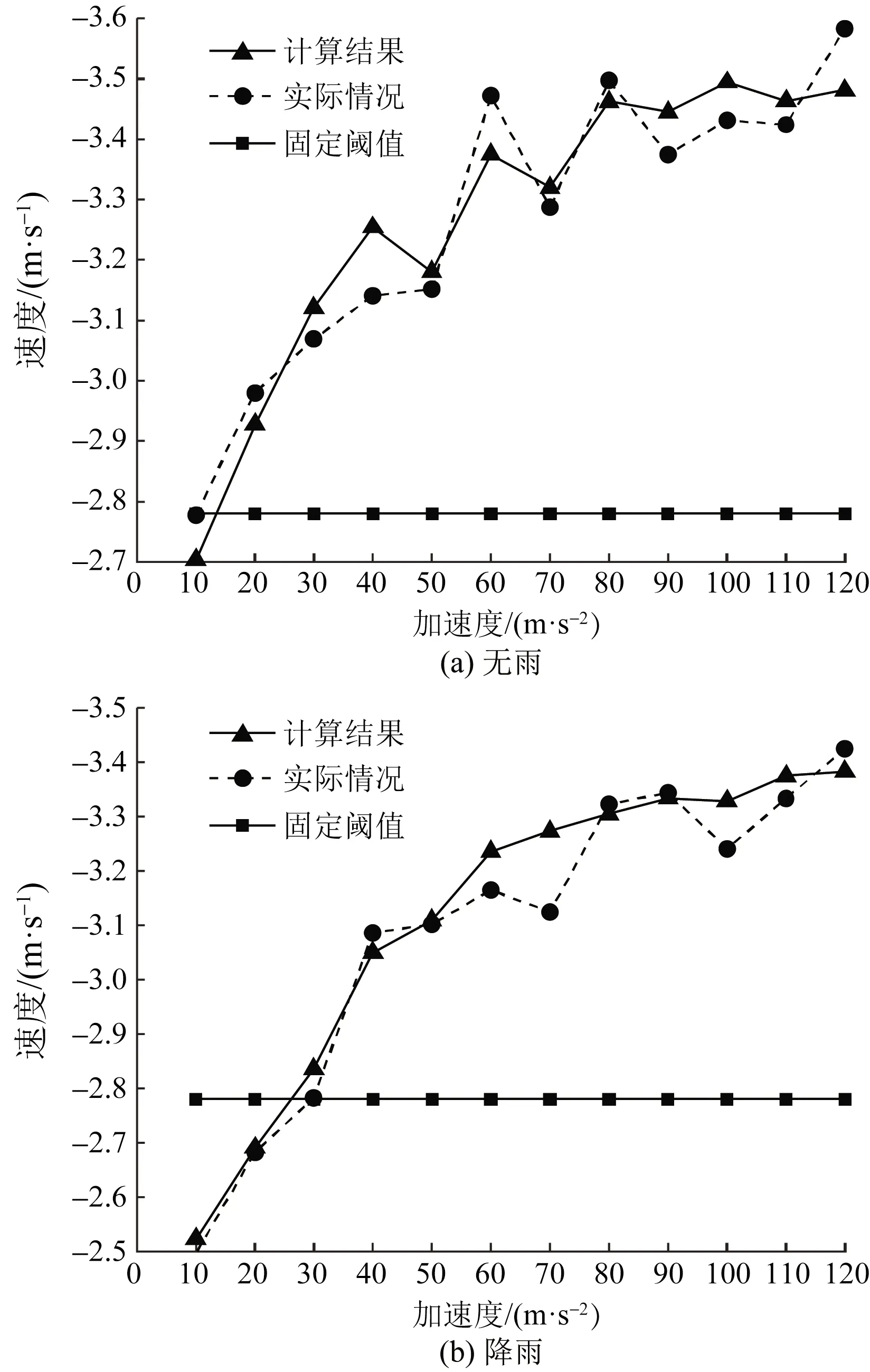
圖4 白天急減速數據對比圖
白天無雨時,使用固定閾值判斷方法,與實際數據的平均誤差比例為14.43%;采用本文方法時平均為1.94%,相較傳統方法準確度提升12.49%,白天降雨時與無雨時類似,準確度提升10.32%,急減速判斷模型的急減速閾值的計算結果與實際數據趨勢相吻合且數據波動幅度均小于3%。
3種統計指標計算結果如表4所示,其中MRE、RMSE兩種誤差均大幅度減小,說明白天場景下使用本方法進行判斷時誤差減小且未出現較高誤差的情況。從對比結果可以看出,該方法對白天場景的適應性較好且基本不受降雨影響,在高速時也表現出較高準確度。
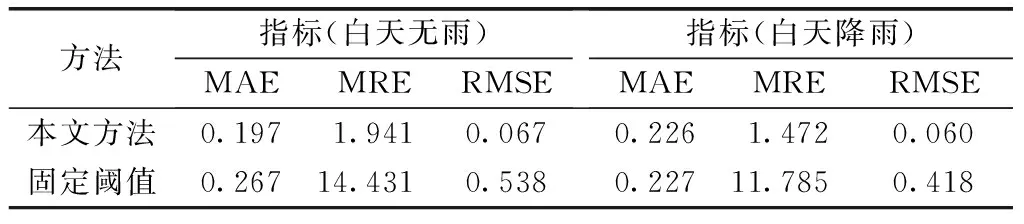
表4 白天場景下誤差對比
4.2.2 夜晚降雨場景
該場景的部分參數組合如表5所示,參數中駕駛員反應時間隨速度逐漸增加,超過100 km/h后保持不變;相較于白天降雨場景,由于路況條件更加復雜,安全距離大幅增加。
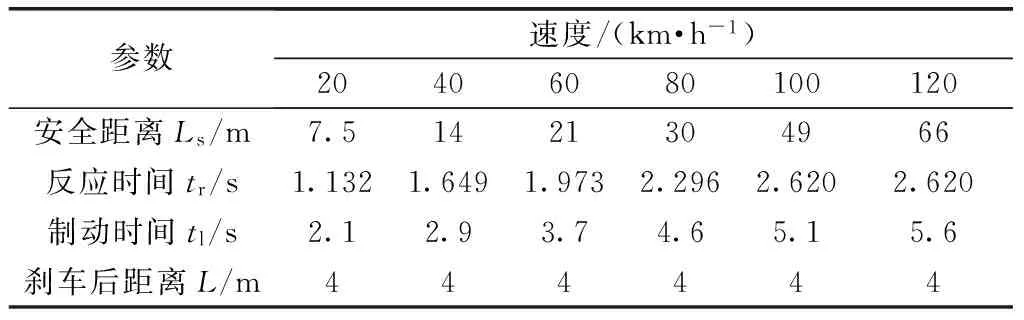
表5 夜間(21:00—24:00)降雨場景部分參數
急減速數值對比結果如圖5所示,在降雨的情況下,按照不同的駕駛速度將夜間(18:00—6:00)劃分為4個部分,可以看出夜間降雨時急減速數值相較無雨時下降。說明降雨給駕駛員造成的影響在夜間更大,但各時段差值不明顯。
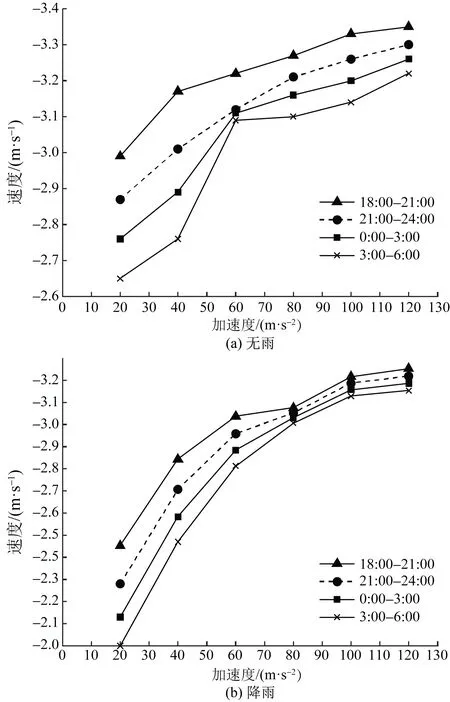
圖5 夜晚急減速數據對比圖
夜晚無雨場景情況如圖6所示,在18:00—21:00時段,使用固定閾值判斷方法,平均誤差比例為13.70%;采用本文方法時平均為1.10%,準確度提升12.60%。在21:00—24:00時段,采用本文方法準確度提升8.12%。但上述時間段車速為60~80 km/h時數據波動較大,超出平均誤差兩倍。
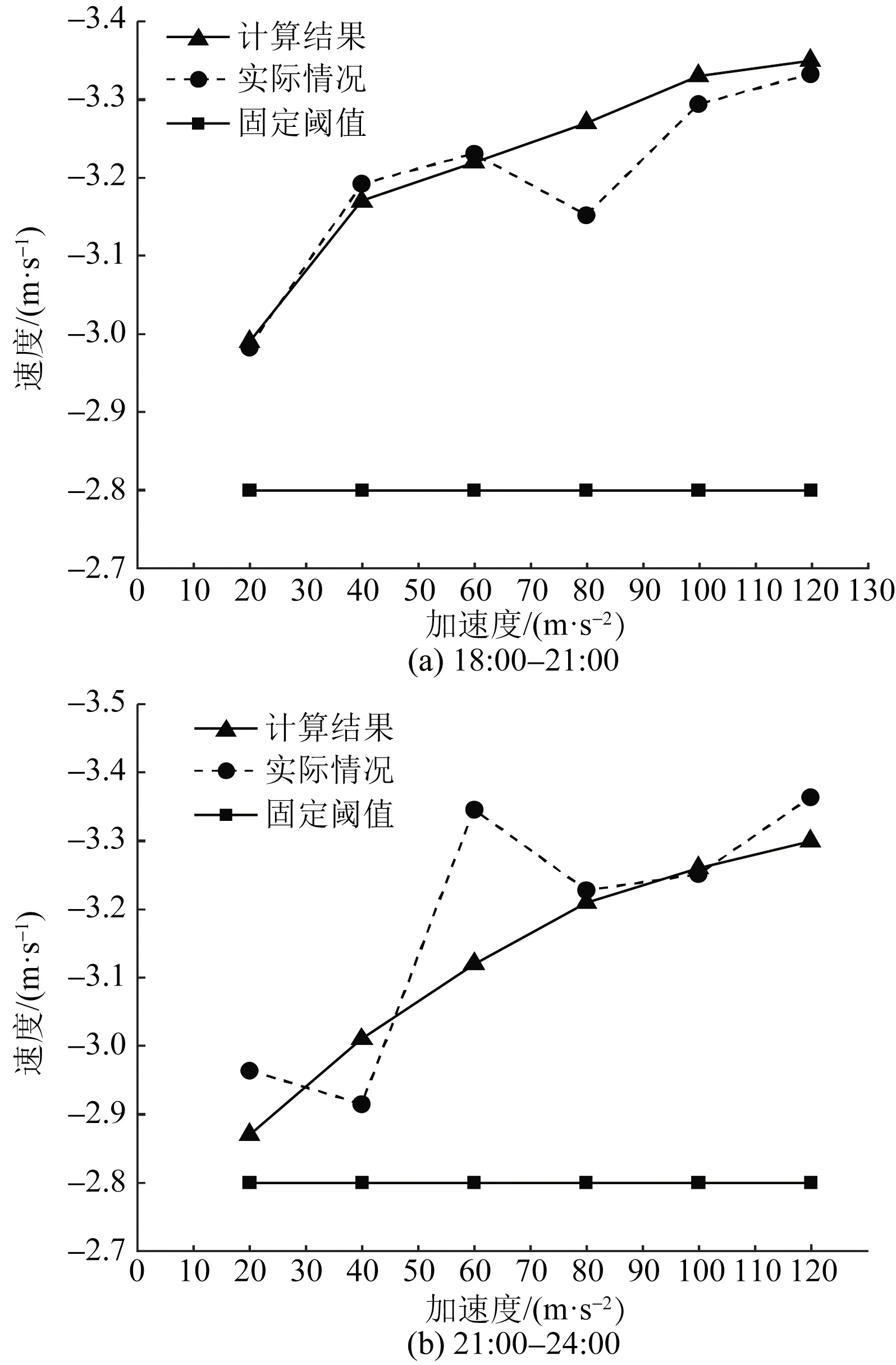
圖6 夜間無雨計算結果與實際數據對比圖
夜晚降雨數據如圖7所示,在18:00—21:00時段,采用本文方法時準確度提升7.43%,且數據波動比例均小于3.5%,計算結果與實際數據趨勢相吻合且誤差幅度較小。在21:00—24:00時段,準確度提升7.53%。
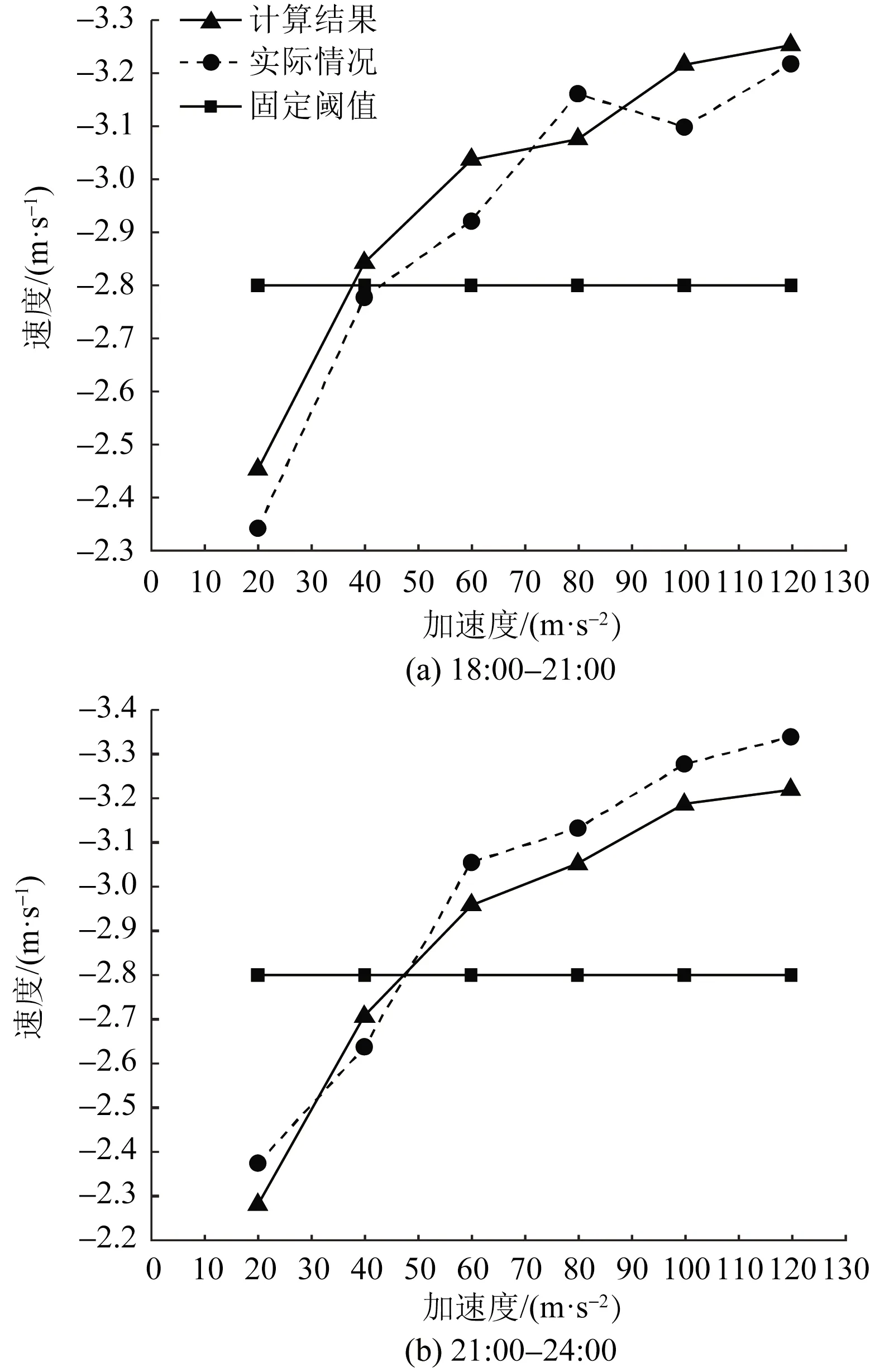
圖7 夜間降雨計算結果與實際數據對比圖
3種統計指標計算結果如表6所示,夜晚無雨場景應用該方法對減少誤差有較大幫助,但夜晚降雨時MAE反而下降,且其他兩個指標降幅較小,說明該方法對較夜晚復雜駕駛場景的適應性有待提高,模型參數及結構仍可改進。
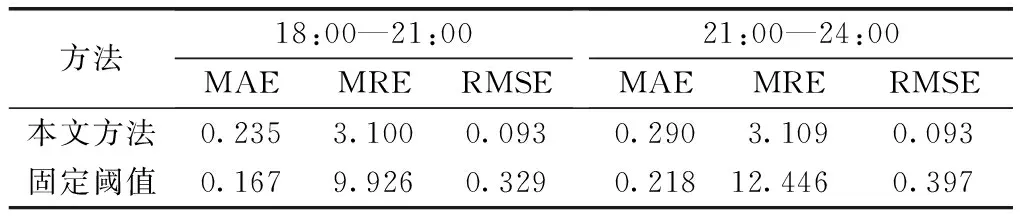
表6 夜晚降雨場景下誤差對比
總結對比結果,該方法對夜晚場景的適應性弱于白天,在車速處于60~80 km/h時,計算結果會產生較大的誤差,主要原因為夜晚駕駛場景復雜。通過定位誤差較大的軌跡數據點后,可知車輛大多行駛于市內環路,晚高峰時環路承載大量車流,車輛擁堵情況嚴重,容易發生連續急減速制動行為(表7),且連續發生頻次遠高于其他場景,此時使用本文方法容易出現判斷錯誤的情況。
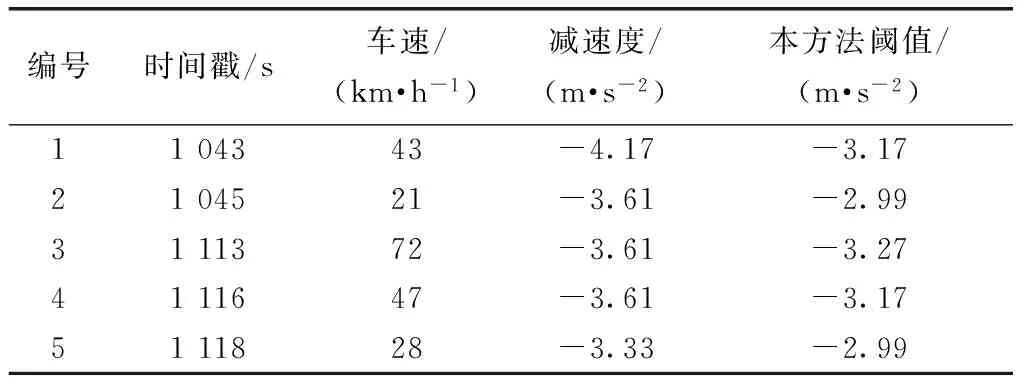
表7 短時連續急減速制動數據示例
5 結論
目前車載自動診斷系統(OBD)數據廣泛應用于交通駕駛安全領域研究中,本文研究中分析了大量相關數據,使用一種方法,通過建立一個覆蓋多場景多參數的模型來判斷駕駛員的急減速駕駛行為,計算制動時的急減速數值,與現有方法進行對比,并用實際數據進行驗證。本方法將駕駛員在城市道路中不同的駕駛場景,并分析了車輛速度從10~120 km/h的不同狀態,將參數進行組合。通過分析可以看出,白天場景下(06:00—18:00)本文方法的計算結果用于判斷急減速情況時,有相對較高的準確度,且白天中等程度的降雨對該結果的影響較小。但在夜晚(18:00—06:00)的準確度比白天稍差,其中在60~80 km/h的速度上存在相對較大的波動,且降雨場景會使該結果的誤差增大。在后續的工作中,會對目前考慮不夠充分的內容進行深入研究,包括考慮其他類別的危險駕駛行為,為模型添加更多場景和更多參數,以提升模型的識別準確水平。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
