基于多傳感器的RNP水平導航仿真研究
2022-04-19 00:47:34屈重君祖肇梓祁鳴東
計算機仿真 2022年3期
關鍵詞:故障
屈重君,祖肇梓,祁鳴東
(航空工業西安飛行自動控制研究所,陜西 西安 710065)
1 引言
隨著民航業的迅猛發展,空中交通流量與日俱增,為適應未來航空運輸發展的需要,針對現行系統的缺點和局限性,國際民航組織(ICAO)提出了新航行系統的概念。隨著新航行系統的發展,對于導航性能的要求越來越高,1991年ICAO的未來空中導航系統委員會提出,飛機應該具備精確、可重復與可預見的導航性能,被稱之為所需導航性能(RNP)[1,2]。
RNP導航技術能夠實現精準地沿期望航跡飛行,極大提高了飛行的效率和安全水平,增大空域容量,降低運營成本。歐美Honeywell、Smiths、Collins、Thales等公司均已有成熟的具備RNP能力的裝機導航系統(設備)[3,4]。目前我國機載導航傳感器的精度己能夠滿足RNP的應用條件要求(即能夠提供滿足精度要求的基本定位參數、速度參數),但自主研制滿足適航要求的RNP導航系統的能力還需要進一步提升,例如水平導航參數、實際導航性能、導航參數的完好性等,這些研究內容屬于水平導航的范疇。
國內研究機構目前針對RNP的研究多集中在單個設備如何提高精度,提高設備的可靠性方面,但對于整個機載導航系統的導航性能評估、完好性監控、飛行技術誤差監控以及導航模式管理的研究不深入。借鑒國外實現RNP的成功經驗,要實現RNP的運行能力,不光要在導航設備的精度方面努力,更重要的是將目光聚焦在導航設備的完好性,實際導航性能評估以及飛行技術誤差的監控等方面。
因此,有必要開展RNP導航系統的水平導航技術研究,為國產大飛機實現RNP運行奠定基礎。
本文針對具有多傳感器輸入的機載導航系統,提出了水平導航計算方法和誤差監控方法,通過導航模式管理、完好性監控、飛行誤差監控以及實際導航性能評估技術實現RNP能力。
2 RNP應用分析
RNP是對指定空域內飛行的飛行器必須具備的導航性能精度的表述。如滿足RNP-1要求,應實現95%的時間保持在期望航跡左右各1NM以內的范圍內飛行;99.999%的時間保持在期望航跡左右各2倍RNP(2NM)范圍以內[5-7]。
針對不同的飛行航段,RNP導航有不同的性能指標要求,本文采用ICAO推薦的指標,如表1所示。
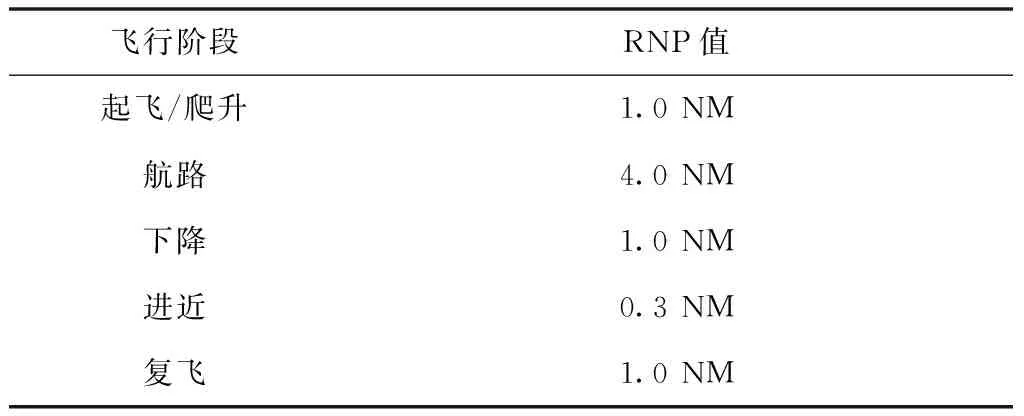
表1 各飛行階段的RNP值
具有RNP運行資質的導航系統必須具備監視系統性能和當不滿足規定性能要求時提供告警的能力。對導航系統性能的監視通常以對總系統誤差(TSE)監視的方式進行[8,9]。
總系統誤差包含三個分量,航跡定義誤差(PDE)、飛行技術誤差(FTE)和導航系統誤差(NSE),如圖1所示。航跡定義誤差為定義航跡和期望航跡之間的誤差;飛行技術誤差為估計位置和定義航跡之間的誤差,即控制飛機的精度,不包括誤操作導致的誤差;導航系統誤差為飛機真實位置和估計位置之間的誤差。
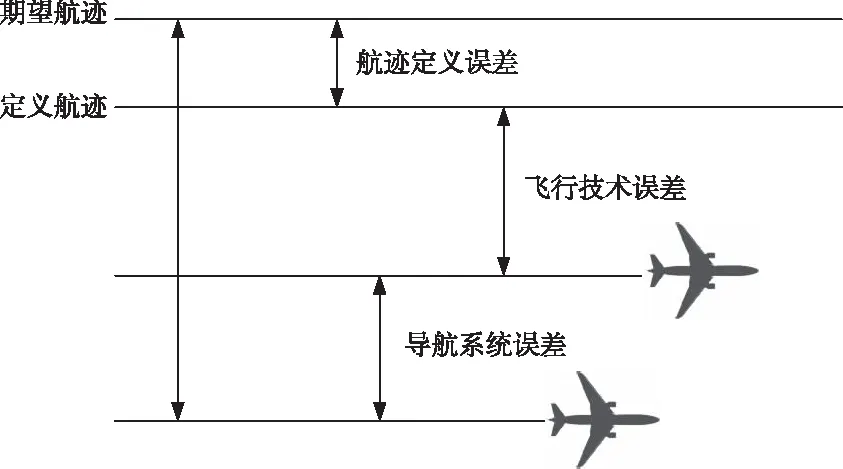
圖1 總系統誤差示意圖
航跡定義誤差通過數據庫的完好性及定義航跡的功能要求進行約束,可以忽略不計。機載性能監視與告警的要素與導航系統誤差和飛行技術誤差相關[10,13]。
導航系統誤差一般用實際導航性能(ANP)描述。ANP指的是在完好性滿足當前RNP要求的情況下對于95%概率下的導航系統精度的估計。ANP以海里為單位,表示一個以估計位置為圓心、ANP值為半徑的圓形區域,飛行器的位置在該圓形區域的概率為95%。系統實時計算并顯示ANP,當ANP超出RNP時告警。

圖2 位置誤差與ANP示意圖
飛行技術誤差與飛行機組人員或自動駕駛儀沿定義的航徑或航跡運行的能力有關。對于飛行技術誤差,只提供監視手段,無告警。飛行技術誤差體現為航跡偏離,根據RNP導航要求,必須在飛行員主視野內(如主飛行顯示PFD)提供航跡偏離顯示,并且偏離刻度必須與當前飛行階段要求的精度相適應。
3 RNP水平導航方法
3.1 導航模式管理方法
導航系統接收并處理來自機載導航傳感器(GPS、IRS、DME、VOR、ADC等)的信息,在滿足導航精度的前提下,選擇滿足當前飛行階段完好性要求的導航傳感器(或者模式),按以下優先級選擇。
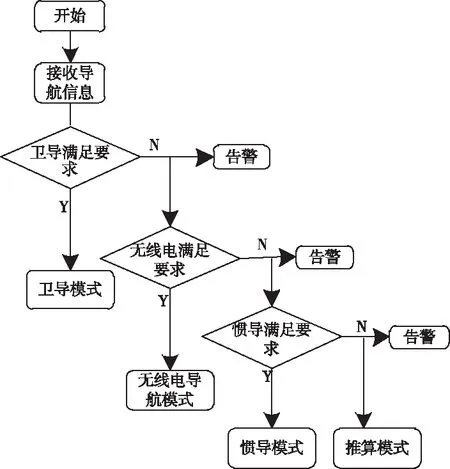
圖3 導航模式管理算法
1) GPS(GPS/INS)
2) DME/DME
3) DME/VOR
4) 慣性導航
5) 航位推算
GPS是支持RNP運行的主要導航源。當GPS滿足完好性時,系統選擇GPS導航模式。當GPS不滿足完好性要求時,切換到次優的導航模式。
由于DME/DME定位方式精度比VOR/DME精度高,優先選取DME/DME定位,用飛機到“DME/DME”臺的斜距計算位置;當沒有符合要求的DME/DME臺時,采用VOR/DME定位,將同站安裝的DME距離和VOR方位結合起來計算位置[10]。
當GPS和無線電導航均不可用時,切換到慣性導航模式。當處于GPS導航模式、DME/DME導航模式或VOR/DME導航模式時,計算系統位置和慣性位置的偏差量。當慣性導航模式被激活時,用這個偏差量校正慣性位置。當有多套慣導可用時,慣性位置為所有可用慣導的位置的加權平均值。
當外部傳感器輸入數據不能維持以上導航模式時,切換到航位推算模式。系統根據IRS或AHRS航向、ADC真空速輸入,以及最后確定的飛機位置和風速,執行航位推算。
3.2 完好性計算
基于GPS的完好性(HIL)由接收機完好性監控(RAIM)計算提供[11,12]。HIL單位為海里,代表了一個圓半徑,以GPS估計位置為圓心,真實位置在所有情況下(無故障和故障情況)落在園內的概率為99.99999%。系統將GPS計算的HIL與當前飛行階段要求的告警門限相比較,當HIL超出告警門限時,發出完好性喪失的告警。告警門限等于飛行階段的RNP值。
HIL的計算方法如下。
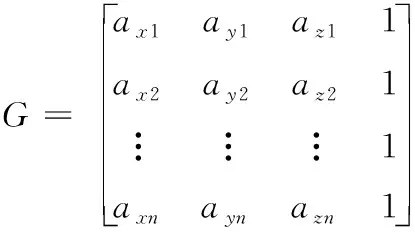
衛星系統量測方程為
y=Gx+ε
(1)
(2)
(3)

(4)
其中y為帶噪聲的量測量,G為相關矩陣,?為測量誤差向量,xsi,ysi,zsi為第i顆衛星的三維位置,xu,yu,zu為用戶位置。
偽距殘差向量為:

(5)
令S=In-(GTG)-1GT,則有:w=S·y=S·ε,最小二乘殘差法檢驗統計量:SSE=wTw。
在正常誤差條件下,判決統計量SSE服從自由度為n-4的χ2分布。對于給定的虛警率PFD和漏警率PMD,應滿足以下關系式:

(6)

(7)
根據DO-229的要求,虛警率和漏警率取為PFD=10-5/h,PMD=0.001。可以計算得到非中心化參數λ。
HIL算法如圖4所示,圖中橫軸代表檢測統計量,T是檢測門限,若檢測統計量大于T,則認為存在故障;縱軸代表定位誤差。每顆衛星都有對應的斜率Ki,斜率Ki越大越容易發生漏檢。所以,如果最大斜率Kmax的衛星發生故障時不產生漏檢,那么其它衛星發生故障時也不會產生漏檢。HIL即假設最難檢測的衛星出現故障,達到檢測門限時對應的水平誤差范圍。
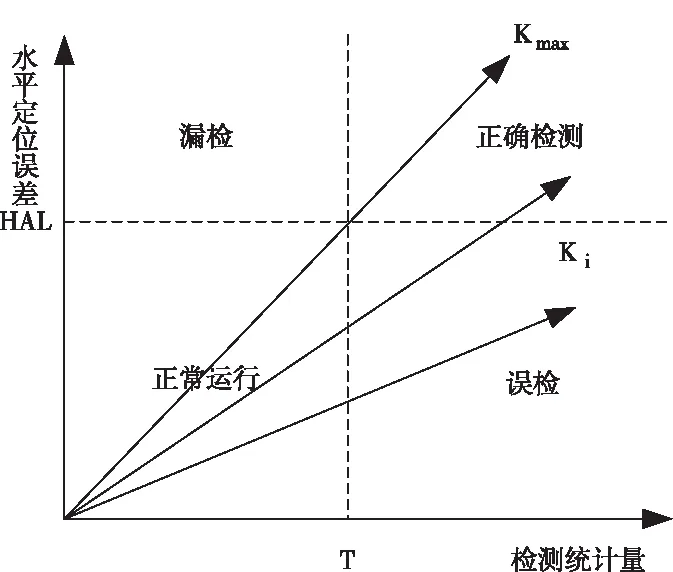
圖4 HIL算法示意圖
第i顆星的斜率為
(8)
A=(GTG)-1GT
(9)
S=In-G(GTG)-1GT
(10)
斜率的最大值

(11)

(12)
無線電導航系統(DME、VOR)的完好性由地面設備提供,地面設備連續地監控發送的信號,如果檢測到了超出容限的情況,會關閉發送機,則無線電信號喪失,這時機載接收機輸出的標志位將指示完好性不滿足。
3.3 實際導航性能評估計算
實際導航性能ANP是實際計算的導航系統精度,當ANP超出RNP時告警。計算ANP時不考慮以下因素:
a. 導航系統的硬件故障或軟件誤差
b. 飛行技術誤差
c. 報告位置使用的時鐘誤差
d. 導航數據庫數據的位置誤差或人工輸入錯誤的航路點引起的位置誤差
e. 當地坐標系與WGS-84坐標系之間的誤差
各導航模式的ANP計算如下:
1)GPS導航模式ANP計算
當GPS是當前導航模式,且HIL滿足當前飛行階段的限制時,利用HIL值來計算ANP。HIL由RAIM功能計算得到,代表99.99999%概率的位置估計誤差。
ANP=K*HIL(如果HIL可用)
(13)
其中K是系統配置值,k的取值在0.5~0.6之間,ANP代表大約95%概率的徑向位置誤差。
2)DME/DME導航模式ANP計算
DME的系統誤差為

(14)
其中,D為距DME臺的距離,單位為海里。
DME/DME導航模式下,定位誤差方差為:

(15)
其中,α為兩個DME地面臺與飛機連線之間的夾角。
根據ANP定義,定位誤差小于ANP值的概率為95%,因此
ANP=1.96σPEE
(16)
3)DME/VOR導航模式ANP計算
VOR的系統誤差為

(17)
其中,D為距VOR臺的距離,單位為海里。
DME/VOR導航模式下,定位誤差方差為

(18)
根據ANP定義,定位誤差小于ANP值的概率為95%,因此
ANP=1.96σPEE
(19)
飛行技術誤差是控制系統自身的誤差,具有一定的統計規律。該誤差與人為操縱錯誤無關,與控制系統故障引起的誤差無關。考慮到飛行的安全性,將偏航距做保守處理近似等價為飛行技術誤差。
3.4 總系統誤差監視技術
總系統誤差的監視采用將ANP和FTE兩個分量綜合起來進行監視的方式。在主飛行顯示(PFD)的底部顯示導航性能刻度,提供FTE、ANP與RNP的相對關系顯示。
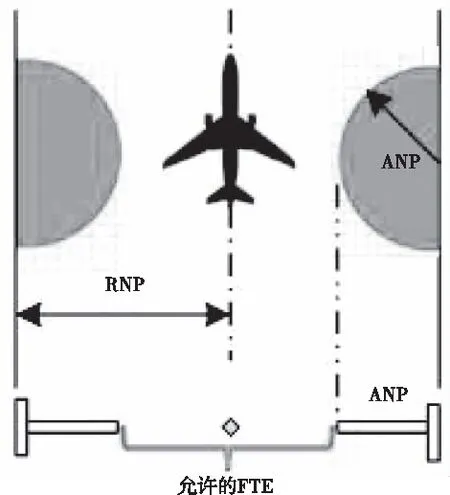
圖5 ANP與FTE示意圖
飛機位置由刻度上的中央標記表示,由中央標記到外側標記之間距離指示的偏離等于RNP值。如果RNP等于1海里,則中央標記與外側標記之間的距離表示1海里。ANP指示桿的長度代表ANP的大小,ANP指示桿隨著ANP值的增大向刻度中心延長。偏離指針表示水平偏離情況,偏離刻度與RNP成比例。
ANP指示桿之間的空隙表示使飛機位置保持在該段航路RNP之內偏離指針的范圍,代表允許的飛行技術誤差。
如果兩端的ANP指示桿在中間相遇,說明ANP等于或超過RNP,則指示桿和刻度變為琥珀色,并顯示RNP不可用的告警信息。
如果偏離指針與ANP指示桿區域重合,意味著FTE與ANP之和超出RNP,即總系統誤差可能超出RNP,則刻度和ANP指示桿變為琥珀色,指針閃爍,提示飛行員。
4 仿真分析
在數字仿真系統中對設計的RNP導航功能進行仿真。根據RTCA/DO-236C標準的要求設置各導航傳感器的測量誤差,并采用西安咸陽機場到北京首都機場的真實民用航線進行飛行仿真。
飛機動力學模型采用B737-800型全動態模型進行仿真。
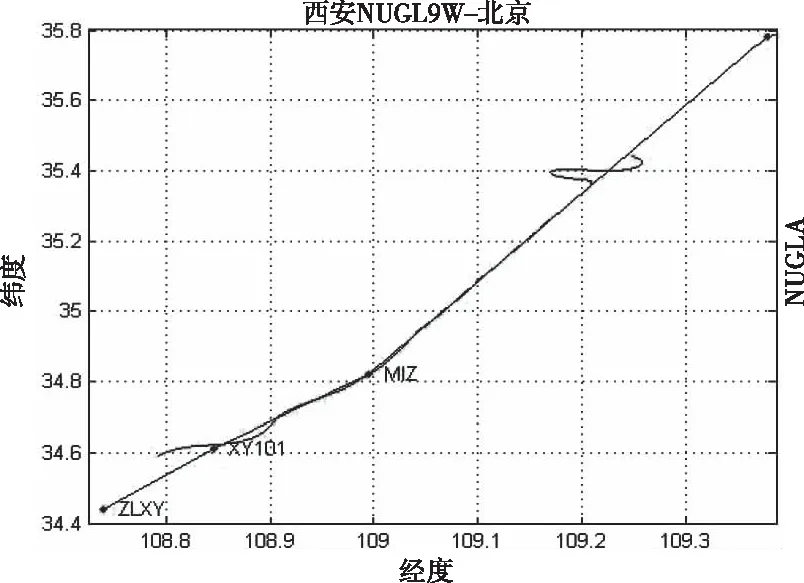
圖6 西安-北京航線
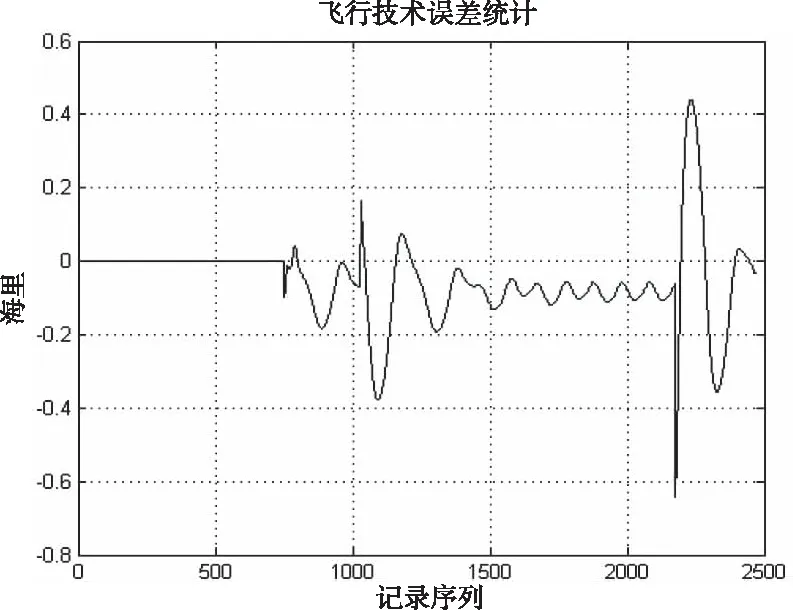
圖7 飛行技術誤差統計曲線
在巡航階段,先后注入GPS故障,DME單通道故障,使系統在3000s~4200s工作在DME/DME導航模式,在4200s~5400s工作在DME/VOR導航模式,其它階段均工作在GPS導航模式。飛行階段RNP值及導航模式如圖8所示。
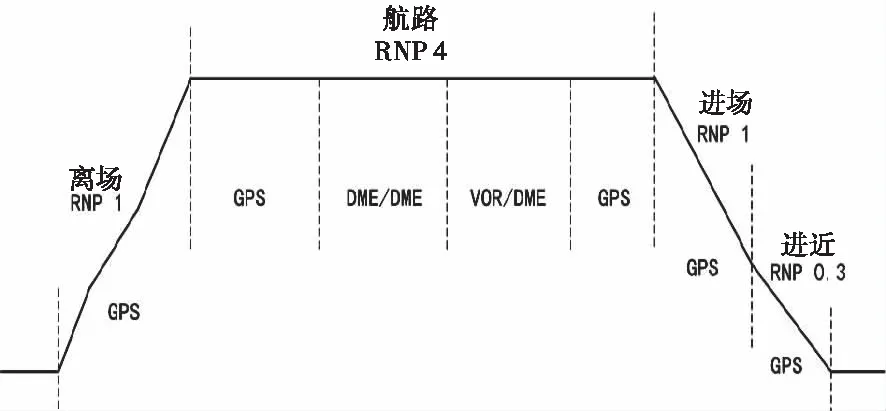
圖8 飛行階段RNP值及導航模式
定位誤差與ANP值如圖9所示。
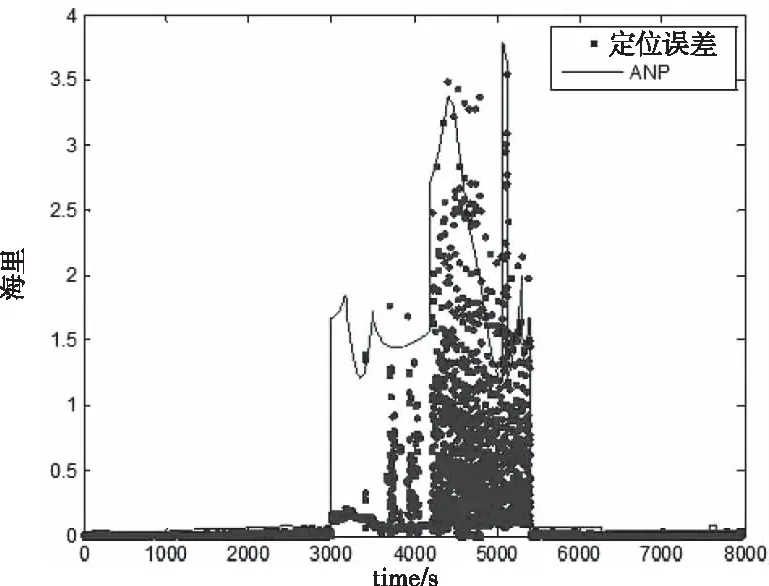
圖9 定位誤差與ANP
在各導航模式下,定位誤差落入ANP范圍之內的點超過95%,即計算的ANP值滿足95%的位置誤差估計。
經過分析圖9中的仿真數據可知,GPS導航模式下,位置估計誤差在0.07NM以內,小于所需的性能指標,能夠滿足RNP-0.3的要求。DME/DME導航模式下,位置估計誤差在2NM以內,能夠滿足RNP-4的要求。VOR/DME導航模式下,位置估計誤差在4NM以內,能夠滿足RNP-4的要求。因此在設計的機載導航模式下,能夠滿足ICAO提出的航路段和進近段要求。
5 結論
本文針對機載獨立的多傳感器導航設備,設計了水平導航計算方法,給出不同導航模式下的完好性監控算法和實際導航性能評估算法。通過在動態數字仿真系統上,將西安咸陽機場到北京首都機場的真實RNP航路作為仿真的目標航線,進行了飛行仿真,結果表明本文所提的方法能夠滿足導航精度要求,是一種可行的機載水平導航的有效方案。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
