電液伺服閥銜鐵組件綜合性能檢測(cè)及應(yīng)用*
2022-04-02 05:37:50王曉露江金林鮮亞平蒯佳祺
飛控與探測(cè) 2022年1期
王曉露,江金林,鮮亞平,蒯佳祺,陸 旻
(1.上海航天控制技術(shù)研究所·上海·201109;2.上海伺服系統(tǒng)工程技術(shù)研究中心·上海·201109)
0 引 言
電液伺服控制集機(jī)械、電子、液壓、傳感與控制等多學(xué)科于一體,目前已成為控制領(lǐng)域的重要組成部分,具有抗負(fù)載能力強(qiáng)、控制精度高、響應(yīng)速度快等優(yōu)勢(shì)。在電液伺服控制系統(tǒng)中,電液伺服閥是一個(gè)復(fù)雜的機(jī)電液一體化元件,起到連接電氣部分及液壓部分的作用。圖1所示為常見(jiàn)的雙噴嘴擋板伺服閥基本結(jié)構(gòu),其簡(jiǎn)單的工作原理為:當(dāng)外界電流信號(hào)輸出力矩馬達(dá)線圈后,處在磁場(chǎng)中的銜鐵受到力的作用偏轉(zhuǎn)一個(gè)角度,同時(shí)擋板也偏擺一個(gè)相應(yīng)的角度,偏擺的結(jié)果使得兩噴嘴與擋板之間的距離發(fā)生變化,比原間隙小的,噴嘴阻力大,噴嘴前腔的壓力升高,反之則降低。這樣使作用在閥芯兩端的油液壓力存在一個(gè)差值,這一壓力差推動(dòng)閥芯運(yùn)動(dòng),使伺服閥輸出負(fù)載壓力。
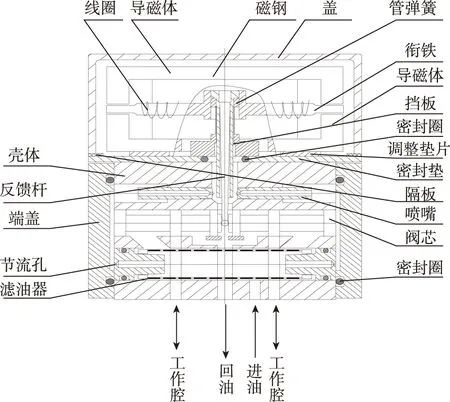
圖1 常見(jiàn)噴嘴擋板伺服閥結(jié)構(gòu)原理圖Fig.1 Structure and mechanism diagram of flapper-nozzle servo valve
銜鐵組件作為電液伺服閥的關(guān)鍵部件,其性能直接關(guān)系到整個(gè)電液伺服閥及其控制系統(tǒng)的控制精度和響應(yīng)速度,也直接影響整個(gè)系統(tǒng)的可靠性及壽命。常見(jiàn)電液伺服閥銜鐵組件主要由銜鐵、管彈簧、擋板及反饋桿四部分組成,如圖2所示,其中擋板與反饋桿、管彈簧與擋板通過(guò)過(guò)盈方式連接,此外銜鐵、擋板及管彈簧同樣采用過(guò)盈方式連接。由于其形狀的非規(guī)則性,這為銜鐵組件的綜合性能測(cè)量增加了難度。
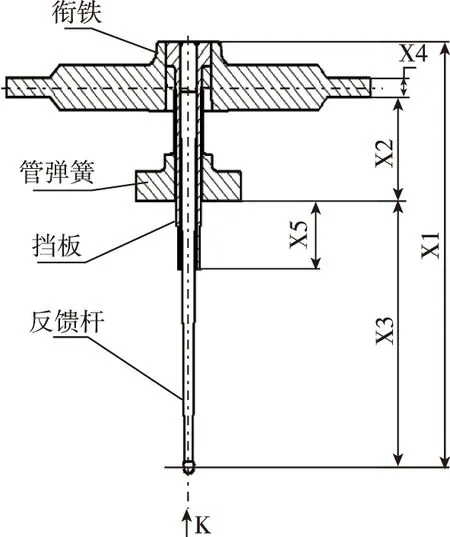
圖2 銜鐵組件示意圖Fig.2 Armature assembly diagram
國(guó)內(nèi)對(duì)銜鐵組件的研究主要集中在銜鐵組件的壓裝、過(guò)盈聯(lián)接分析、振動(dòng)特性及嘯叫等。大連理工大學(xué)胡菊云通過(guò)有限元分析軟件 ANSYS Workbench ,分析了銜鐵組件各組成零件間參數(shù)對(duì)銜鐵組件壓裝力的影響規(guī)律,從而確定銜鐵組件各組成零件間過(guò)盈量的范圍。上海航天控制技術(shù)研究所熊美等基于厚壁圓筒過(guò)盈配合原理,通過(guò)對(duì)零件材料的屈服極限進(jìn)行理論分析計(jì)算,確定了合理過(guò)盈量范圍,該方法解決了裝配時(shí)經(jīng)常出現(xiàn)的組件壓配變形、平行度等指標(biāo)超差等問(wèn)題。李松晶等對(duì)伺服閥力矩馬達(dá)銜鐵組件的振動(dòng)特性進(jìn)行了分析,提出了消除射流流場(chǎng)中與銜鐵組件固有頻率相接近的壓力脈動(dòng)激勵(lì)信號(hào),可防止銜鐵組件共振的發(fā)生。哈爾濱工業(yè)大學(xué)劉海茹通過(guò)分析測(cè)量環(huán)境下銜鐵組件組合剛度與彈簧管、反饋桿剛度的關(guān)系,并與力矩馬達(dá)中銜鐵組件綜合剛度進(jìn)行對(duì)比,確定了銜鐵組件綜合剛度的測(cè)量方案。
國(guó)外在對(duì)銜鐵組件研究方面,J.Watton總結(jié)出了高頻振動(dòng)產(chǎn)生的條件;S.Ziada通過(guò)一系列試驗(yàn)研究,驗(yàn)證了壓力脈動(dòng)是直接導(dǎo)致銜鐵組件自激振動(dòng)的原因;T.Nishiumi等提出了用算法的方式抑制伺服閥振動(dòng),為振動(dòng)抑制提供了一條可行途徑;A.Glaun通過(guò)分析流體振動(dòng)的原因及類(lèi)型,提出了相應(yīng)的抑振措施。
上述理論及試驗(yàn)研究并未結(jié)合電液伺服閥銜鐵組件實(shí)際工況進(jìn)行分析,因此圍繞銜鐵組件形狀的非規(guī)則性,需有針對(duì)性地開(kāi)展銜鐵組件綜合性能檢測(cè)裝置研究。通過(guò)裝置軟硬件設(shè)計(jì)獲得銜鐵組件綜合性能參數(shù),并利用其進(jìn)行不同銜鐵組件對(duì)比試驗(yàn)。試驗(yàn)結(jié)果表明,通過(guò)對(duì)銜鐵組件綜合性能參數(shù)的有效控制為伺服閥嘯叫振動(dòng)抑制提供了新途徑,還為銜鐵組件批生產(chǎn)的質(zhì)量控制提供了裝備支撐。
1 電液伺服閥銜鐵組件運(yùn)動(dòng)機(jī)理
圖3所示為常見(jiàn)電液伺服閥銜鐵組件運(yùn)動(dòng)機(jī)理示意圖,工作狀態(tài)下銜鐵組件靜態(tài)力矩平衡方程為

圖3 銜鐵組件轉(zhuǎn)動(dòng)示意圖Fig.3 Armature assembly rotation diagram

)+Δ+(+)Δ
(1)
其中,為銜鐵組件綜合剛度;Δ為輸入電流;為管彈簧的剛度系數(shù),為磁彈簧的剛度系數(shù),(-)為力矩馬達(dá)的凈剛度,為了保證閥的穩(wěn)定性和力矩馬達(dá)能正常工作,必須使>;為擋板偏轉(zhuǎn)角度;為銜鐵組件回轉(zhuǎn)中心到噴嘴中心軸線的距離;為噴嘴擋板的流量系數(shù);為噴嘴擋板的零位間隙;為供油壓力;為反饋桿的剛度;為噴嘴孔中心至反饋桿球心的距離;Δ為前置級(jí)壓差;為噴嘴孔面積;Δ為閥芯位移變化量。
力矩馬達(dá)總力矩在克服銜鐵運(yùn)動(dòng)時(shí)的各負(fù)載,主要體現(xiàn)在銜鐵的電磁力矩與慣性力矩、阻尼力矩、管彈簧力矩及負(fù)載力矩相平衡

(2)
式中,為銜鐵組件活動(dòng)部分的轉(zhuǎn)動(dòng)慣量;為銜鐵的機(jī)械支撐和負(fù)載的黏性阻尼;為作用在銜鐵組件上的負(fù)載力矩,=+,為雙噴嘴液動(dòng)力形成的力矩,為反饋桿形成的力矩。所以力矩馬達(dá)平衡方程為

(3)
負(fù)載力矩為噴嘴液動(dòng)力形成的力矩和反饋桿形成的力矩,其表達(dá)式為

(+)+(+)
(4)
再由閥芯的力平衡方程(忽略閥芯摩擦力)可得

)+]+043(-)
(5)
Δ=

(6)
當(dāng)閥芯達(dá)到最大行程時(shí),前置級(jí)的壓差最大。
Δ=

(7)


每個(gè)反饋桿作用在閥芯的最大力為=(+)+;
每個(gè)反饋桿產(chǎn)生的最大力矩為=(+)+(+)。
當(dāng)輸入電流為額定電流時(shí),閥芯行程最大,前置級(jí)壓差也達(dá)到最大,此時(shí)力矩馬達(dá)最大輸出力矩為
=(-)++
(8)
該力矩為每個(gè)力矩馬達(dá)輸出最大額定力矩。由式(1)~式(8)推導(dǎo)過(guò)程,可得以下兩點(diǎn)結(jié)論:
1)銜鐵組件在實(shí)際工作中會(huì)受到電磁力矩的作用,促使擋板發(fā)生偏轉(zhuǎn),偏轉(zhuǎn)后擋板左右輸出腔壓力不等,由此造成閥芯運(yùn)動(dòng),閥芯運(yùn)動(dòng)過(guò)程中會(huì)拖動(dòng)銜鐵組件反饋桿運(yùn)動(dòng)。
2)針對(duì)特定的電液伺服閥產(chǎn)品,因額定電流與額定流量已知,由此產(chǎn)生的電磁力矩與閥芯位移量大小已知,通過(guò)在銜鐵一端施加特定力值可模擬銜鐵組件在工作過(guò)程中受到的電磁力矩;通過(guò)在反饋桿球頭端施加特定位移值可模擬銜鐵組件在工作過(guò)程中的球頭位移。最后通過(guò)上述公式推導(dǎo)計(jì)算,可獲得銜鐵組件的綜合性能。
2 電液伺服閥銜鐵組件綜合性能檢測(cè)裝置設(shè)計(jì)
前文通過(guò)公式推演為銜鐵組件綜合性能檢測(cè)提供了一個(gè)有效思路,即以外部力及位移加載的方式模擬銜鐵組件實(shí)際工作過(guò)程中受到的力和位移大小。通過(guò)銜鐵組件綜合性能檢測(cè)裝置研制,可獲得銜鐵組件在額定工作條件下的綜合性能參數(shù),下文就伺服閥銜鐵組件綜合性能檢測(cè)裝置原理及組成作詳細(xì)介紹。
2.1 伺服閥銜鐵組件綜合性能檢測(cè)裝置原理設(shè)計(jì)
圖4和圖5所示分別為伺服閥銜鐵組件綜合性能檢測(cè)裝置原理示意圖及加載與測(cè)量示意圖,該裝置由測(cè)量系統(tǒng)和控制系統(tǒng)兩部分組成。測(cè)量系統(tǒng)由定位夾具、調(diào)整機(jī)構(gòu)、反饋桿球頭加載定位系統(tǒng)、擋板視覺(jué)系統(tǒng)、銜鐵視覺(jué)系統(tǒng)、銜鐵加載系統(tǒng)等單元組成,控制系統(tǒng)由數(shù)據(jù)采集卡、光源驅(qū)動(dòng)卡、加載驅(qū)動(dòng)卡、視頻采集等組成。根據(jù)測(cè)量功能,測(cè)試臺(tái)分為銜鐵位移及銜鐵載荷檢測(cè)、擋板位移檢測(cè)和反饋桿球頭位移及球頭載荷檢測(cè)三部分。其中對(duì)銜鐵位移和擋板位移采用視覺(jué)檢測(cè)系統(tǒng)實(shí)現(xiàn)二者位移的非接觸測(cè)量,銜鐵、球頭載荷檢測(cè)均采用高精度測(cè)力傳感器實(shí)現(xiàn),球頭位移檢測(cè)采用非接觸式的光學(xué)位移檢測(cè)系統(tǒng)來(lái)完成,最后通過(guò)綜合計(jì)算得出銜鐵組件綜合性能。
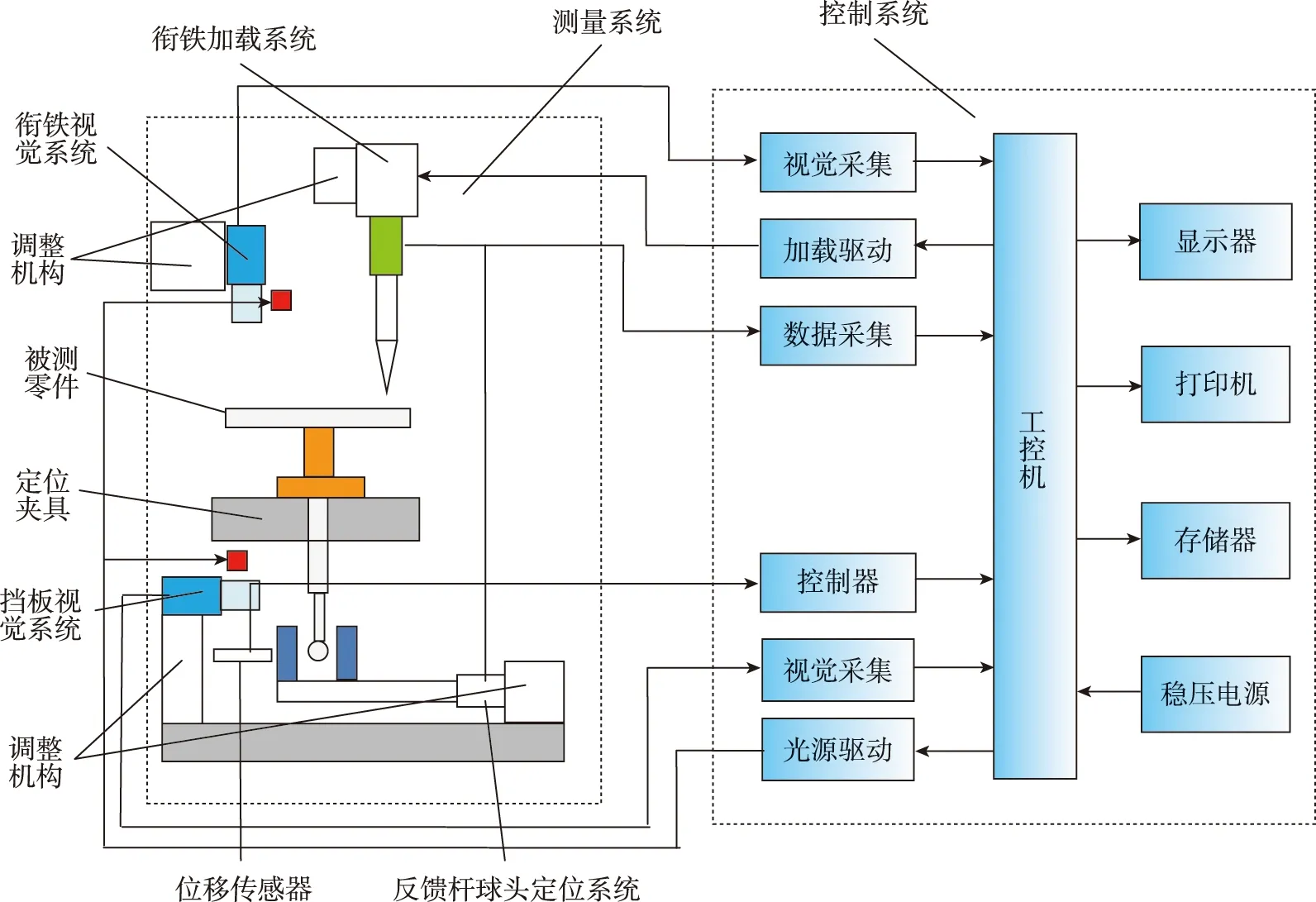
圖4 銜鐵組件綜合性能檢測(cè)裝置原理圖Fig.4 Principle diagram of comprehensive performance testing device for armature assembly
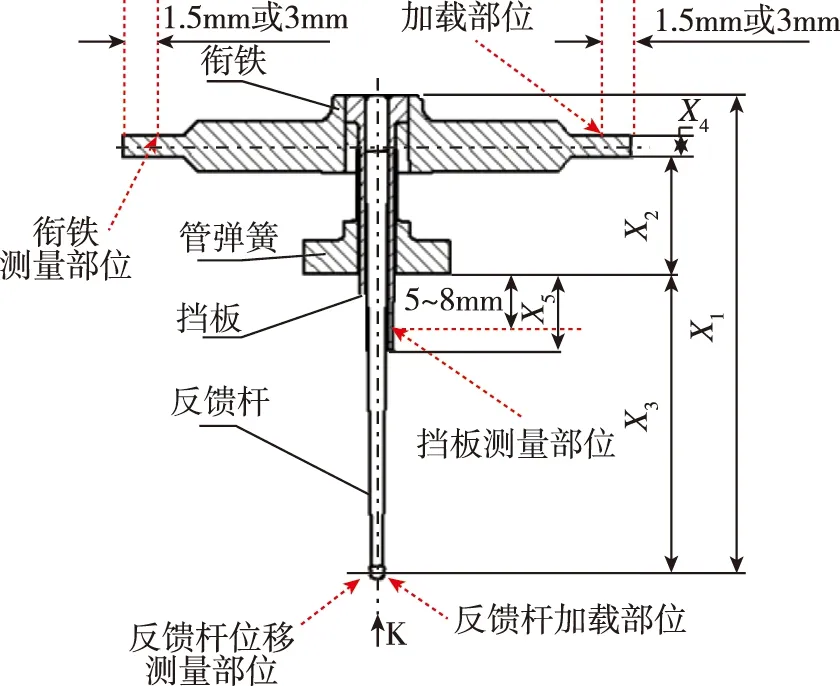
圖5 銜鐵組件加載與測(cè)量示意圖Fig.5 Loading and measuring diagram of armature assembly
2.2 反饋桿球頭加載定位系統(tǒng)設(shè)計(jì)
反饋桿球頭加載定位系統(tǒng)由導(dǎo)向機(jī)構(gòu)、力傳感器、球頭加載桿、激光位移傳感器等幾部分組成,如圖6(a)所示。反饋桿球頭位移加載前可先調(diào)節(jié)加載桿高度,調(diào)整機(jī)構(gòu)使得反饋桿球頭位于加載桿的合適位置,并調(diào)節(jié)激光位移傳感器調(diào)整機(jī)構(gòu)使激光位移傳感器處于合適的高度位置。球頭加載定位系統(tǒng)由于采用非接觸式光學(xué)位移傳感器,測(cè)量精度高,避免了接觸式測(cè)量時(shí)對(duì)球頭產(chǎn)生的額外作用力,提高了加載力測(cè)量的精度。此外激光位移傳感器布置于加載頭后端,通過(guò)高度調(diào)整機(jī)構(gòu)使得激光位移傳感器光軸和球頭球心處于同一水平線上,有效消除了測(cè)量誤差,如圖6(b)所示。
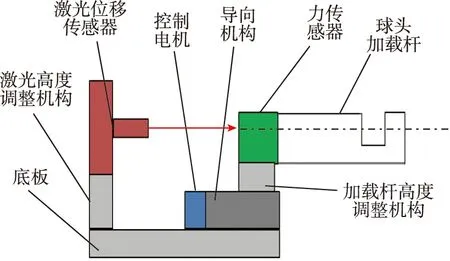
(a)反饋桿加載定位示意圖
2.3 銜鐵自動(dòng)加載系統(tǒng)設(shè)計(jì)
為了保證整個(gè)測(cè)量系統(tǒng)的穩(wěn)定性和可靠性,提供重復(fù)測(cè)量精度,避免人工干擾帶來(lái)的測(cè)量誤差,加載過(guò)程應(yīng)優(yōu)先采用自動(dòng)加載方法。整個(gè)自動(dòng)加載系統(tǒng)由銜鐵加載桿、力傳感器、導(dǎo)向機(jī)構(gòu)、水平調(diào)整機(jī)構(gòu)、控制電機(jī)和支架等組成,如圖7所示。具體加載原理為:先調(diào)節(jié)水平調(diào)整機(jī)構(gòu)使得加載桿位于銜鐵加載部位的正上方,此時(shí)加載桿與銜鐵不接觸,力傳感器輸出為0,然后電機(jī)驅(qū)動(dòng)導(dǎo)向機(jī)構(gòu)對(duì)銜鐵進(jìn)行加載。
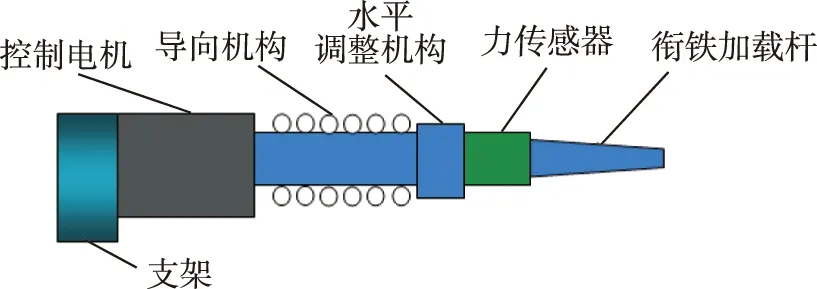
圖7 銜鐵自動(dòng)加載系統(tǒng)設(shè)計(jì)Fig.7 Design of armature automatic loading system
2.4 視覺(jué)系統(tǒng)設(shè)計(jì)
視覺(jué)系統(tǒng)的主要功能是實(shí)現(xiàn)銜鐵位移和擋板位移的非接觸、高精度測(cè)量。視覺(jué)系統(tǒng)主要由三維調(diào)整機(jī)構(gòu)、光源、鏡頭、轉(zhuǎn)接鏡筒和攝像機(jī)組成,如圖8所示。

圖8 視覺(jué)系統(tǒng)設(shè)計(jì)Fig.8 Visual system design
2.5 控制系統(tǒng)及軟件設(shè)計(jì)
整套裝置的控制系統(tǒng)及軟件設(shè)計(jì)涵蓋銜鐵組件綜合性能測(cè)量過(guò)程:包括銜鐵、反饋桿加載機(jī)構(gòu)的控制,擋板、銜鐵位移檢測(cè)機(jī)構(gòu)的數(shù)據(jù)采集,以及數(shù)據(jù)處理、計(jì)算、顯示、存儲(chǔ)、打印等,如圖9和圖10所示。通過(guò)人機(jī)界面可以進(jìn)行啟動(dòng)測(cè)量和停止測(cè)量功能,手工安裝被測(cè)銜鐵組件后,啟動(dòng)測(cè)量,選擇測(cè)量選項(xiàng),系統(tǒng)通過(guò)控制力加載及測(cè)量、測(cè)量機(jī)構(gòu)、圖像采集處理等進(jìn)行相關(guān)運(yùn)算,取得測(cè)量結(jié)果,并將測(cè)量結(jié)果顯示于用戶界面。圖11所示為最終研制的伺服閥銜鐵組件綜合性能檢測(cè)裝置實(shí)物圖。
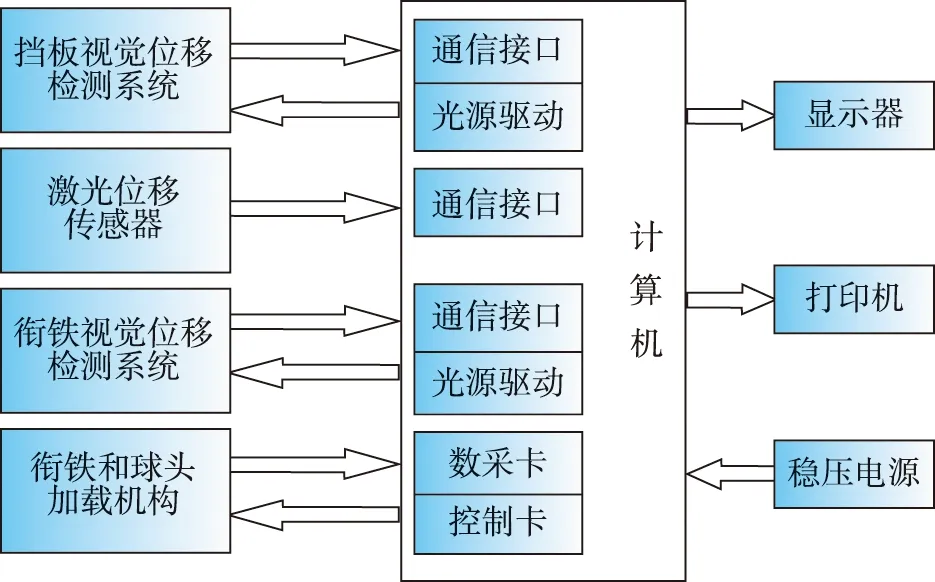
圖9 銜鐵組件綜合性能測(cè)量系統(tǒng)設(shè)計(jì)Fig.9 Design of measurement system for comprehensive performance of armature assembly
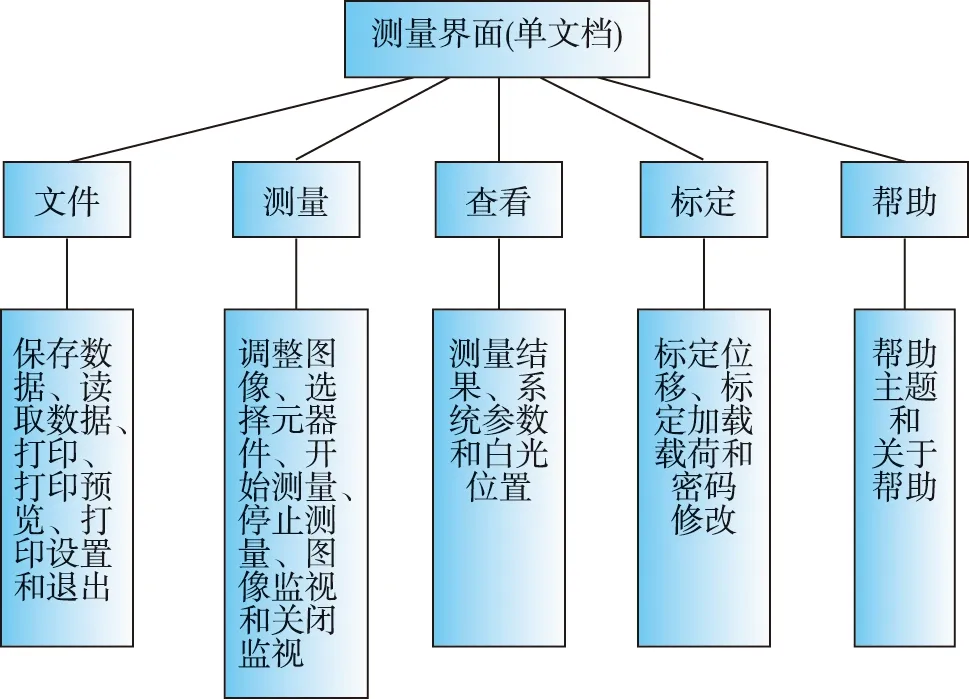
圖10 銜鐵組件綜合性能測(cè)量系統(tǒng)軟件界面示意圖Fig.10 Software interface sketch of armature assembly’s comprehensive performance measurement system

圖11 銜鐵組件綜合性能檢測(cè)裝置實(shí)物圖Fig.11 Testing device for comprehensive performance of armature assembly
3 伺服閥銜鐵組件綜合性能檢測(cè)裝置試驗(yàn)研究
為定量衡量伺服閥銜鐵組件綜合性能檢測(cè)裝置研制的有效性,取某批次伺服閥銜鐵組件加載過(guò)程擋板位移性能測(cè)試數(shù)據(jù),如表1所示。為盡量降低測(cè)量誤差,采用多次測(cè)量的方式,測(cè)試過(guò)程中按照該銜鐵組件實(shí)際最大擺動(dòng)工況進(jìn)行力和位移加載,并測(cè)量不同銜鐵組件在加載完成后的擋板位移大小。測(cè)量完成后將各銜鐵組件安裝成單馬達(dá)及整閥再進(jìn)行液壓測(cè)試臺(tái)性能檢測(cè)。

表1 銜鐵組件擋板位移測(cè)量結(jié)果表(單位:微米)Tab.1 Measurement result sheet of armature assembly flapper displacement (unit:μm)
根據(jù)上述5只伺服閥銜鐵組件安裝成單馬達(dá)和整閥的檢測(cè)結(jié)果,可以得到如下結(jié)論:
1)不同銜鐵組件在相同加載力條件下測(cè)得的擋板位移量比較離散,且大部分銜鐵組件的數(shù)值較低。分析其原因可能與反饋桿剛度、管彈簧剛度、銜鐵組件各零件之間的壓配參數(shù)等有關(guān)。
2)銜鐵組件綜合性能檢測(cè)裝置測(cè)量的擋板位移量與單馬達(dá)和整閥性能之間存在一定的對(duì)應(yīng)關(guān)系,除表1羅列的5只伺服閥測(cè)量結(jié)果外,通過(guò)大量伺服閥銜鐵組件測(cè)量結(jié)果表明,擋板位移過(guò)小時(shí)(數(shù)值范圍處于0 ~2μm之間),安裝成單馬達(dá)測(cè)試過(guò)程中容易引起銜鐵組件諧振現(xiàn)象;擋板位移較小時(shí)(數(shù)值范圍處于2 ~4μm之間),安裝成整閥性能測(cè)試過(guò)程中容易引起整閥諧振現(xiàn)象;擋板位移較大時(shí)(數(shù)值范圍高于4μm 時(shí)),安裝成單馬達(dá)及整閥后,諧振現(xiàn)象基本消失。
3)對(duì)同一銜鐵組件的多次測(cè)量結(jié)果表明,多次測(cè)量的數(shù)據(jù)偏差較小,表明銜鐵組件綜合性能檢測(cè)裝置數(shù)據(jù)的一致性較好,可用于后續(xù)伺服閥銜鐵組件生產(chǎn)過(guò)程量化性能測(cè)試。
4 結(jié) 論
本文圍繞銜鐵組件形狀的非規(guī)則性,有針對(duì)性地開(kāi)展了銜鐵組件綜合性能檢測(cè)裝置研制,通過(guò)軟硬件設(shè)計(jì)獲得了銜鐵組件綜合性能參數(shù),并利用其進(jìn)行不同銜鐵組件對(duì)比試驗(yàn)。試驗(yàn)結(jié)果表明,通過(guò)銜鐵組件綜合性能參數(shù)的有效控制為伺服閥嘯叫振動(dòng)抑制提供了新途徑,還為銜鐵組件批生產(chǎn)的質(zhì)量控制提供了裝備支撐。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
