基于單極性PWM的開關(guān)磁阻電機(jī)轉(zhuǎn)矩控制策略*
2022-04-02 05:37:52房維芊張新華張兆凱
飛控與探測 2022年1期
關(guān)鍵詞:控制策略
房維芊,張新華,張兆凱
(北京自動化控制設(shè)備研究所·北京·100074)
0 引 言
開關(guān)磁阻電機(jī)(Switched Reluctance Motor,SRM)作為一種結(jié)構(gòu)簡單、可靠性好、性價比高的新型伺服電機(jī),近年來已成為電氣傳動領(lǐng)域的研究熱點。SRM的定、轉(zhuǎn)子為雙凸極結(jié)構(gòu),其轉(zhuǎn)子無永磁體與繞組,可適用于高速運行及高溫環(huán)境;此外,SRM各相均為獨立驅(qū)動工作,其驅(qū)動系統(tǒng)具有較高的容錯能力,這些優(yōu)勢使得SRM在航空工業(yè)領(lǐng)域擁有較為廣泛的實際應(yīng)用場景。
然而與傳統(tǒng)伺服電機(jī)相比,SRM有一個明顯的缺點,即因電機(jī)結(jié)構(gòu)及脈沖工作方式所引起的大轉(zhuǎn)矩脈動。為有效抑制轉(zhuǎn)矩脈動,通過優(yōu)化控制策略以提高系統(tǒng)轉(zhuǎn)矩控制能力是目前各國學(xué)者的重點研究方向。文獻(xiàn)[3]介紹了基于轉(zhuǎn)矩分配函數(shù)(Torque Sharing Function,TSF)的直接轉(zhuǎn)矩控制策略,通過轉(zhuǎn)矩分配函數(shù)確定期望轉(zhuǎn)矩,從而實現(xiàn)各相轉(zhuǎn)矩平滑過渡。該策略在低速運行時可獲得良好的控制性能,但高速時因相電流變化遲緩,無法按轉(zhuǎn)矩脈動最小分布,導(dǎo)致其轉(zhuǎn)矩抑制能力受限。文獻(xiàn)[4]介紹了基于模糊控制的直接轉(zhuǎn)矩控制策略,該策略雖適用于SRM此類非線性系統(tǒng),但因模糊設(shè)計本身缺乏系統(tǒng)性且模糊控制精度與運算強(qiáng)度的強(qiáng)相關(guān)特性,導(dǎo)致其并不適用于高精度伺服控制。
本文從高精度高速伺服電機(jī)控制角度出發(fā),對SRM轉(zhuǎn)矩脈動抑制開展研究。以滯環(huán)型直接瞬時轉(zhuǎn)矩控制(Direct Instantaneous Torque Con-trol,DITC)策略為基礎(chǔ),結(jié)合脈沖寬度調(diào)制(Pulse Width Modulation,PWM)特性,提出了單極性PWM-DITC控制策略。通過對單極性PWM-DITC控制策略的仿真設(shè)計與實驗,驗證了本文提出的控制策略可有效抑制SRM轉(zhuǎn)矩脈動。
1 開關(guān)磁阻電機(jī)的滯環(huán)DITC策略
開關(guān)磁阻電機(jī)DITC策略以轉(zhuǎn)矩作為被控對象,將瞬時轉(zhuǎn)矩信息通過計算直接轉(zhuǎn)換為邏輯控制信號,使實際瞬時轉(zhuǎn)矩有效地跟蹤參考轉(zhuǎn)矩,進(jìn)而達(dá)到抑制轉(zhuǎn)矩脈動的效果。
在DITC類型中,采用滯環(huán)控制是一種較為常見的方法。滯環(huán)DITC系統(tǒng)為內(nèi)轉(zhuǎn)矩環(huán)、外速度環(huán)的雙閉環(huán)結(jié)構(gòu),主要由SRM本體、功率變換器、轉(zhuǎn)矩滯環(huán)控制器等組成,轉(zhuǎn)矩滯環(huán)控制器是其核心所在,系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
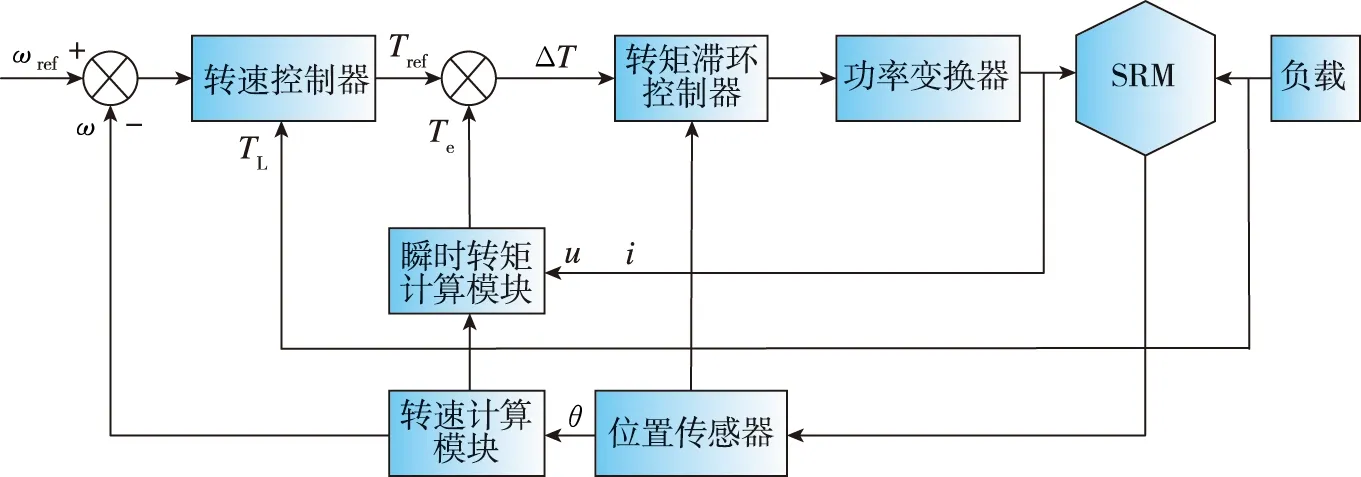
圖1 滯環(huán)DITC系統(tǒng)框圖Fig.1 Block diagram of hysteresis DITC system
圖1中,、、分別為給定轉(zhuǎn)速、實際轉(zhuǎn)速及負(fù)載轉(zhuǎn)矩;、、分別為相電壓、相電流及各相位置角度。轉(zhuǎn)矩滯環(huán)控制器通過計算出的瞬時轉(zhuǎn)矩與參考轉(zhuǎn)矩的偏差值Δ,得到轉(zhuǎn)矩輸出信號,并根據(jù)各相繞組采集到的位置信息,判斷當(dāng)前各相所處導(dǎo)通區(qū)域,得到位置輸出信號,最后將轉(zhuǎn)矩輸出信號與位置輸出信號相乘,對功率變換器中的開關(guān)管輸出PWM邏輯控制信號,進(jìn)而實現(xiàn)對電機(jī)的運行控制。
1.1 功率變換器的開關(guān)狀態(tài)
SRM驅(qū)動控制采用以絕緣柵雙極型晶體管(Insulated Gate Bipolar Transistor,IGBT)為主開關(guān)器件的三相不對稱半橋電路,對應(yīng)的功率電路狀態(tài)如圖2所示,其中VT1、VT2為IGBT;VD1、VD2為續(xù)流二極管;開關(guān)狀態(tài)分別為勵磁狀態(tài)、零電壓續(xù)流狀態(tài)和反向退磁狀態(tài),分別用=1、=0 、=-1表示。

圖2 功率變換器的三種開關(guān)狀態(tài)Fig.2 Three switching states of power converter
1.2 轉(zhuǎn)矩滯環(huán)區(qū)間的設(shè)計
根據(jù)當(dāng)前相所處位置不同,即單相導(dǎo)通區(qū)與換相導(dǎo)通區(qū)兩種情況,對轉(zhuǎn)矩滯環(huán)控制器內(nèi)部的滯環(huán)區(qū)間分別設(shè)計相應(yīng)的控制方案,滯環(huán)設(shè)計如圖3~圖5所示。

圖3 單相導(dǎo)通區(qū)Fig.3 Single phase conduction zone

圖4 換相導(dǎo)通區(qū)-即將導(dǎo)通相Fig.4 Commutation conduction zone-phase to be switch on

圖5 換相導(dǎo)通區(qū)-即將關(guān)斷相Fig.5 Commutation conduction zone-phase to be shut off
(1)單相導(dǎo)通區(qū)
單相導(dǎo)通區(qū)只有當(dāng)前一相繞組被激勵,在忽略繞組間互感的前提下,該相繞組產(chǎn)生的瞬時轉(zhuǎn)矩即為最終輸出的瞬時轉(zhuǎn)矩。設(shè)定該相繞組的兩種控制狀態(tài)分別為=1開通狀態(tài)與=0續(xù)流狀態(tài),詳細(xì)設(shè)計如下:
當(dāng)轉(zhuǎn)矩偏差Δ遞增時:若Δ>Δ,則將開關(guān)置于=1開通狀態(tài),當(dāng)前相繞組勵磁,瞬時轉(zhuǎn)矩快速增大;若-Δ<Δ<Δ,則將開關(guān)置于=0續(xù)流狀態(tài),當(dāng)前相繞組壓降為0,瞬時轉(zhuǎn)矩緩慢減小;若Δ<-Δ,則將開關(guān)置于=-1關(guān)斷狀態(tài),當(dāng)前相繞組為承受負(fù)壓,瞬時轉(zhuǎn)矩快速減小。
當(dāng)轉(zhuǎn)矩偏差Δ遞減時:若Δ>-Δ,則將開關(guān)置于=1開通狀態(tài),當(dāng)前相繞組勵磁,瞬時轉(zhuǎn)矩快速增大;若-Δ≤Δ≤Δ,則將開關(guān)置于=0續(xù)流狀態(tài),當(dāng)前相繞組壓降為0,瞬時轉(zhuǎn)矩緩慢減小;若Δ<-Δ,則將開關(guān)置于=-1關(guān)斷狀態(tài),當(dāng)前相繞組為承受負(fù)壓,瞬時轉(zhuǎn)矩快速減小。
(2)換相導(dǎo)通區(qū)
換相導(dǎo)通區(qū)為即將導(dǎo)通相與即將關(guān)斷相共同勵磁的區(qū)域,其最終輸出的瞬時轉(zhuǎn)矩為兩相共同作用的合成瞬時轉(zhuǎn)矩。相較于單相導(dǎo)通區(qū)的單滯環(huán)設(shè)計,換相導(dǎo)通區(qū)需對即將導(dǎo)通相與即將關(guān)斷相分別設(shè)置不同的滯環(huán)控制。即將導(dǎo)通相有三種控制狀態(tài),分別為=1開通狀態(tài)、=0續(xù)流狀態(tài)與=-1關(guān)斷狀態(tài);即將關(guān)斷相有兩種控制狀態(tài),分別為=1開通狀態(tài)與=0續(xù)流狀態(tài),與單相導(dǎo)通區(qū)滯環(huán)設(shè)計一致。即將導(dǎo)通相詳細(xì)設(shè)計如下:
當(dāng)轉(zhuǎn)矩偏差Δ遞增時:若Δ>0,則將開關(guān)置于=0續(xù)流狀態(tài),當(dāng)前相繞組壓降為0,瞬時轉(zhuǎn)矩緩慢減小;若Δ<0,則將開關(guān)置于=-1關(guān)斷狀態(tài),當(dāng)前相繞組為承受負(fù)壓,瞬時轉(zhuǎn)矩快速減小。
當(dāng)轉(zhuǎn)矩偏差Δ遞減時:若Δ>-Δ,則將開關(guān)置于=1開通狀態(tài),當(dāng)前相繞組勵磁,瞬時轉(zhuǎn)矩快速增大;若Δ<-Δ,則將開關(guān)置于=0續(xù)流狀態(tài),當(dāng)前相繞組壓降為0,瞬時轉(zhuǎn)矩緩慢減小。
2 基于滯環(huán)控制改進(jìn)的單極性PWM-DITC策略
滯環(huán)控制盡管具有結(jié)構(gòu)簡單、響應(yīng)迅速、誤差小的優(yōu)點,但其開關(guān)頻率不固定、控制精度與滯環(huán)寬度強(qiáng)相關(guān)的缺點,在換相期的兩相頻繁通斷過程中會被成倍放大。若設(shè)計較小的滯環(huán)區(qū)間,理論上可提高系統(tǒng)響應(yīng)速度與控制精度,降低轉(zhuǎn)矩脈動,但會大幅度增加開關(guān)管的工作頻率與損耗,系統(tǒng)或出現(xiàn)振蕩情況,在實際運行中也可能會因為過高的開關(guān)頻率導(dǎo)致溫升過快,超過開關(guān)管工作限值,從而損壞開關(guān)器件,造成系統(tǒng)失控;若設(shè)計較大的滯環(huán)區(qū)間,則又會削弱系統(tǒng)的控制效果,無法實現(xiàn)對轉(zhuǎn)矩脈動的良好抑制。
因此,為改善因滯環(huán)特性導(dǎo)致的換相區(qū)大轉(zhuǎn)矩脈動,本文將單極性PWM與滯環(huán)控制相結(jié)合,針對換相導(dǎo)通區(qū),將原滯環(huán)控制替換為單極性PWM控制。由于單極性PWM輸出電壓波形的高次諧波分量小、開關(guān)頻率低,且其每半個輸出電壓周期中2個橋臂切換高低頻的工作模式,對于同樣規(guī)格的IGBT功率元件,其開關(guān)損耗也較小。通過使用單極性PWM控制,換相區(qū)的較高開關(guān)頻率可得到一定程度的抑制,進(jìn)而降低因換相期間高頻通斷所導(dǎo)致的轉(zhuǎn)矩波動。
該型控制策略的系統(tǒng)框圖如圖6所示。

圖6 單極性PWM-DITC系統(tǒng)框圖Fig.6 Block diagram of unipolar PWM-DITC system
轉(zhuǎn)矩偏差輸入單極性PWM-DITC算法模塊后,根據(jù)位置信息判斷各相繞組所處導(dǎo)通區(qū)域,當(dāng)處于單相導(dǎo)通區(qū)時,保持原滯環(huán)控制;當(dāng)處于換相導(dǎo)通區(qū)時,采用單極性PWM控制,確定輸出給功率變換器的邏輯控制信號,即+1、0、-1開關(guān)狀態(tài),進(jìn)而完成對SRM的控制。換相導(dǎo)通區(qū)單極性PWM設(shè)計如圖7和圖8所示。

圖7 即將導(dǎo)通相AFig.7 Phase A to be switch on

圖8 即將關(guān)斷相BFig.8 Phase B to be shut off
對即將導(dǎo)通相A,采用+1、0開關(guān)邏輯:即當(dāng)轉(zhuǎn)矩偏差Δ大于三角載波時,為使即將導(dǎo)通相瞬時轉(zhuǎn)矩增大,盡快接替即將關(guān)斷相瞬時轉(zhuǎn)矩,故將開關(guān)置為+1開通狀態(tài),A相快速勵磁,從而減小轉(zhuǎn)矩誤差,隨著逐漸增大,Δ減小;當(dāng)轉(zhuǎn)矩偏差Δ小于三角載波時,為緩慢減小導(dǎo)通相瞬時轉(zhuǎn)矩,將開關(guān)置為0續(xù)流狀態(tài)。
對即將關(guān)斷相B,采用0、-1開關(guān)邏輯,即當(dāng)轉(zhuǎn)矩偏差Δ大于三角載波時,為快速地過渡與,不再增加即將關(guān)斷相瞬時轉(zhuǎn)矩,故將開關(guān)置為0續(xù)流狀態(tài),只通過A相勵磁使Δ減小;當(dāng)轉(zhuǎn)矩偏差Δ小于三角載波時,為快速減小即將關(guān)斷相,將開關(guān)置為-1關(guān)斷狀態(tài),B相反相退磁,使快速減小。
3 系統(tǒng)仿真與結(jié)果分析
本仿真系統(tǒng)根據(jù)圖1與圖6的系統(tǒng)框圖搭建,主要包含由仿真軟件提供的10kW三相6/4極SRM模塊、PID調(diào)速模塊、位置采集模塊、轉(zhuǎn)矩控制模塊、功率變換器模塊。
3.1 仿真參數(shù)設(shè)定
轉(zhuǎn)矩控制模塊內(nèi)部控制算法采用S函數(shù)編寫完成,開通角及關(guān)斷角分別設(shè)定為50°、85°,滯環(huán)限為Δ=05、Δ=03,單極性PWM-DITC模塊的三角載波頻率設(shè)定為8kHz。給定轉(zhuǎn)速=14000r/min,在1.5s時,令負(fù)載轉(zhuǎn)矩由3Nm向6.5Nm躍變。
3.2 仿真結(jié)果分析
SRM在滯環(huán)DITC與單極性PWM-DITC下的相電流及轉(zhuǎn)矩波形如圖9~圖16所示。負(fù)載變動時和轉(zhuǎn)矩穩(wěn)定時的仿真結(jié)果對比分別如表1和表2所示。

表1 負(fù)載變動時的仿真結(jié)果對比Tab.1 Comparison of output torque simulation results
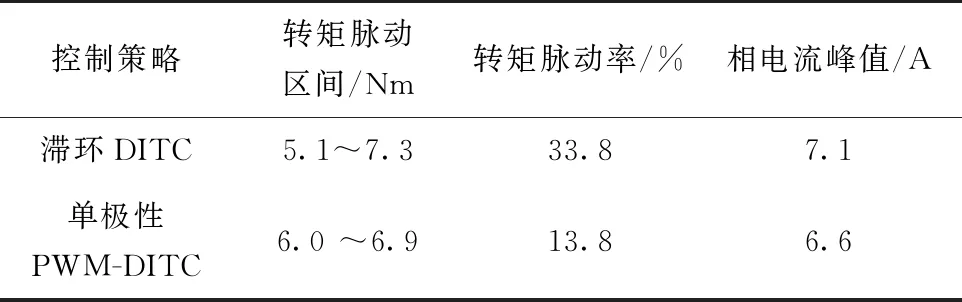
表2 轉(zhuǎn)矩穩(wěn)定時的仿真結(jié)果對比Tab.2 Comparison of output torque simulation results

圖9 滯環(huán)DITC下負(fù)載變動時的相電流Fig.9 Current of load change under hysteresis DITC

圖10 單極性PWM-DITC下負(fù)載變動時的相電流Fig.10 Current of load change under unipolar PWM-DITC

圖11 滯環(huán)DITC下負(fù)載變動時的輸出轉(zhuǎn)矩Fig.11 Torque of load change under hysteresis DITC

圖12 單極性PWM-DITC下負(fù)載變動時的輸出轉(zhuǎn)矩Fig.12 Torque of load change under unipolar PWM-DITC
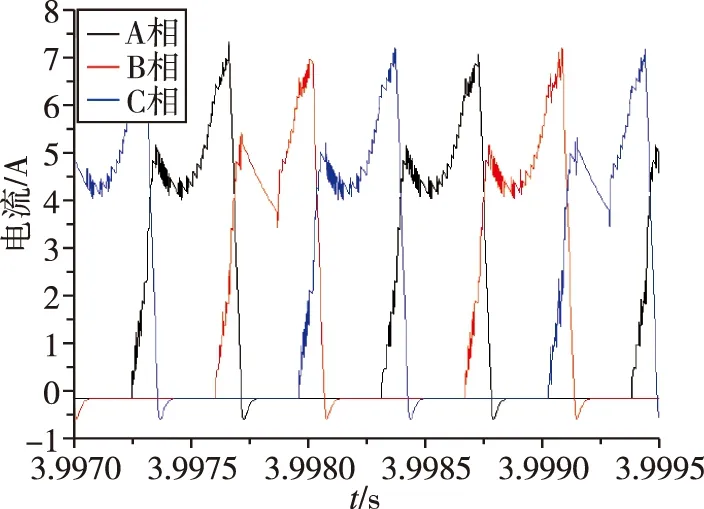
圖13 滯環(huán)DITC下穩(wěn)定運行時的相電流Fig.13 Current of stable operation under hysteresis DITC

圖14 單極性PWM-DITC下穩(wěn)定運行時的相電流Fig.14 Current of stable operation under unipolar PWM-DITC
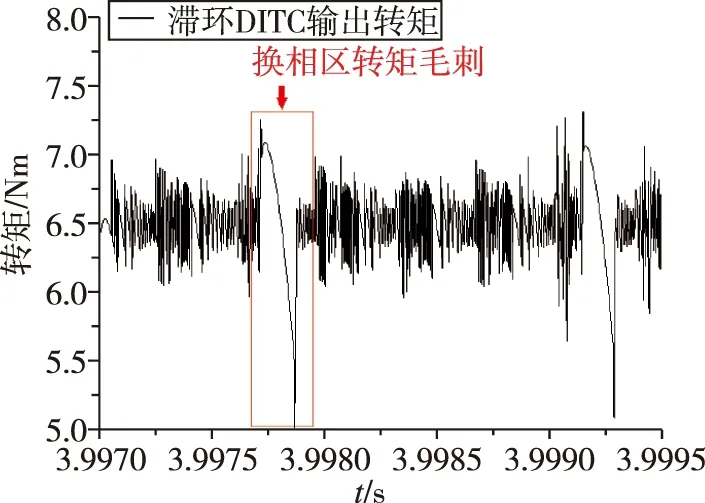
圖15 滯環(huán)DITC下穩(wěn)定運行時的輸出轉(zhuǎn)矩Fig.15 Torque of stable operation under hysteresis DITC

圖16 單極性PWM-DITC下穩(wěn)定運行時的輸出轉(zhuǎn)矩Fig.16 Torque of stable operation under unipolar PWM-DITC
由圖11和圖12可知,當(dāng)系統(tǒng)負(fù)載轉(zhuǎn)矩于1.5s由3Nm躍變至6.5Nm時,經(jīng)單極性PWM-DITC下的轉(zhuǎn)矩穩(wěn)定維持在5.9Nm~7.1Nm之間,轉(zhuǎn)矩脈動率約為18.4%,負(fù)載變動過程平滑;而滯環(huán)DITC下的轉(zhuǎn)矩在負(fù)載變動時則出現(xiàn)了較大波動,轉(zhuǎn)矩脈動區(qū)間達(dá)到了3.2Nm,轉(zhuǎn)矩脈動率高達(dá)49.2%。由此可知,單極性PWM-DITC可有效減小負(fù)載變動時引起的大轉(zhuǎn)矩脈動,避免系統(tǒng)出現(xiàn)振蕩情況,其抗負(fù)載擾動能力遠(yuǎn)強(qiáng)于滯環(huán)DITC方式。
當(dāng)SRM處于穩(wěn)定運行狀態(tài)時,由圖13和圖14可知,單極性PWM-DITC下的三相電流峰值相較于滯環(huán)DITC下的三相電流峰值減小約7%,單極性PWM-DITC對穩(wěn)態(tài)下的相電流有小幅度優(yōu)化;由圖15和圖16可得,滯環(huán)DITC下的轉(zhuǎn)矩在5.1Nm~7.3Nm之間波動,轉(zhuǎn)矩脈動率約為33.8%,單極性PWM-DITC的轉(zhuǎn)矩則在6.0Nm~6.9Nm之間波動,轉(zhuǎn)矩脈動率約為13.8%,對比滯環(huán)DITC轉(zhuǎn)矩脈動率降低約59.2%。單極性PWM-DITC下的換相區(qū)轉(zhuǎn)矩波形毛刺明顯少于滯環(huán)DITC,穩(wěn)態(tài)輸出轉(zhuǎn)矩得到大幅度優(yōu)化,故單極性PWM-DITC可有效地抑制換相區(qū)轉(zhuǎn)矩脈動。
4 結(jié) 論
本文提出了一種基于滯環(huán)DITC改進(jìn)的單極性PWM-DITC策略,系統(tǒng)地介紹了單極性PWM-DITC原理與設(shè)計思想,并對其進(jìn)行了仿真設(shè)計與驗證。仿真結(jié)果表明,單極性PWM-DITC策略相較于滯環(huán)DITC策略,可有效抑制換相區(qū)的大轉(zhuǎn)矩脈動,使換相期間的導(dǎo)通相與關(guān)斷相轉(zhuǎn)矩能夠相對平滑地完成過渡;同時單極性PWM-DITC策略下的SRM具有良好的抗負(fù)載擾動能力,可大幅度降低負(fù)載轉(zhuǎn)矩變動時引起的轉(zhuǎn)矩脈動。綜上所述,本文提出的PWM-DITC策略充分優(yōu)化了轉(zhuǎn)矩控制效果,實現(xiàn)了SRM轉(zhuǎn)矩的平穩(wěn)控制,提高了系統(tǒng)轉(zhuǎn)矩控制能力。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
