混合多饋入直流輸電系統連續換相失敗抑制策略
2022-03-27 11:41:02鐘明明夏成軍黎壽濤黃楚茵李成翔
電力工程技術 2022年2期
鐘明明, 夏成軍, 黎壽濤, 黃楚茵, 李成翔
(1. 華南理工大學電力學院,廣東 廣州 510640;2. 廣東省新能源電力系統智能運行與控制企業重點實驗室,廣東 廣州 510663;3. 直流輸電技術國家重點實驗室(南方電網科學研究院有限責任公司),廣東 廣州 510663)
0 引言
隨著直流輸電工程[1]在大容量遠距離輸電及區域電網互聯等領域的廣泛應用,已經出現多條基于電網換相換流器的高壓直流(line commutated converter based high voltage direct current,LCC-HVDC)線路與基于電壓源換流器的高壓直流(voltage source converter based high voltage direct current ,VSC-HVDC)[2—4]線路落點于同一交流系統的混合多饋入直流輸電系統[5]。例如,上海蘆潮港和浙江舟山嵊泗島之間運行的LCC-HVDC與舟山五端VSC-HVDC工程[6]就形成了一個混合雙饋入直流輸電系統;南方電網昆柳龍直流輸電系統與其他多回LCC-HVDC構成一個混合多饋入直流輸電系統。LCC-HVDC采用晶閘管作為換流元件,存在換相失敗現象[7—9],而VSC-HVDC無換相失敗問題,且可提供無功電壓支撐。如何利用VSC-HVDC的無功電壓支撐能力來改善多饋入直流輸電系統的故障恢復特性,尤其是抑制LCC-HVDC的連續換相失敗就成了一個熱點研究問題。
針對如何抑制連續換相失敗,現有文獻主要從3個方面進行改進,分別是改進直流電流參考值、快速增大越前觸發角以及提升換流母線電壓支撐。文獻[10—12]分階段分析了LCC-HVDC連續換相失敗的產生機理,提出電流偏差控制輸出的快速降低會引發連續換相失敗。文獻[11—13]均提出了改進的低壓限流控制(voltage dependent current order limit,VDCOL)來抑制連續換相失敗,但這會導致LCC-HVDC傳輸的有功功率減少,嚴重的會導致受端交流系統存在較大的有功缺額。文獻[14—15]提出根據臨界電壓來控制直流輸送功率的策略,改善直流系統的無功需求從而抑制連續換相失敗。文獻[16—19]提出換相失敗預測控制,在換相裕度不足時快速增大越前觸發角,增大換相裕度。文獻[20—21]分別提出基于關斷角和觸發角的無功協調控制策略,以此來提高LCC-HVDC抵御連續換相失敗的能力。文獻[22]分析諧波是直流故障恢復期間發生連續換相失敗的原因之一,提出基于諧波電壓補償的連續換相失敗抑制策略。文獻[23—24]建立了LCC-HVDC逆變器關斷角、直流電流和VSC-HVDC輸出無功功率的關聯模型,在換相失敗可控域內進行優化控制。文獻[25—26]分析了LCC-HVDC與VSC-HVDC之間的電氣距離以及VSC-HVDC系統控制器的調節速度對混合多饋入系統故障恢復特性的影響。
現有文獻提出的協調控制策略,其設計初衷是大幅增大VSC-HVDC的無功功率,為系統提供動態無功支撐,這往往會導致故障清除后其輸出的有功功率受限,不利于系統功率恢復。文中提出了VSC-HVDC附加無功控制以及動態功率限幅調節策略,充分利用VSC-HVDC的容量裕度,合理分配其輸出的有功功率與無功功率,可以較大限度提升混合多饋入直流輸電系統的故障恢復特性,提高系統運行的穩定性。最后在PSCAD/EMTDC軟件中驗證了該協調控制策略的有效性。
1 混合多饋入直流輸電系統
1.1 系統結構
文中所用混合多饋入直流輸電系統采用典型的混合雙饋入直流輸電系統模型,其拓撲結構如圖1所示,Z1,Z2為整流側等值阻抗;Z′1,Z′2為逆變側等值阻抗;LCC-HVDC與VSC-HVDC之間的電氣距離用等值阻抗Z12表示。LCC-HVDC采用CIGRE模型[27],其控制策略也與CIGRE模型保持一致;VSC-HVDC模型采用PSCAD官方模型。此系統可以看作是由實際復雜電力系統抽象得到的簡化模型。
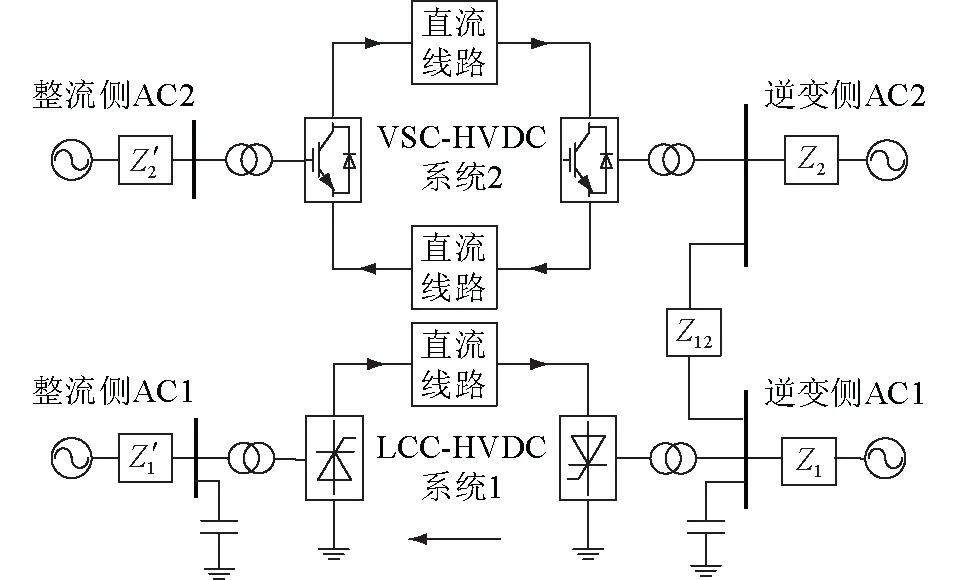
圖1 混合雙饋入直流輸電系統結構
1.2 LCC與VSC受端換流站控制策略
CIGRE直流輸電標準測試系統逆變側的控制結構如圖2所示。其中,Ud_inv為逆變側直流電壓的測量值;Id_inv為直流電流的測量值;γm為逆變側熄弧角的測量值;γref為熄弧角參考值;Id_order為定電流給定參考值;Idr_order為最終送整流側的直流電流參考值;βinv_CC,βinv_CEA分別為逆變側定電流控制和定熄弧角控制輸出的越前觸發角參考值;βinv為最終越前觸發角參考值。由圖2可知,逆變側的控制主要由VDCOL、定電流控制、定熄弧角控制和電流偏差控制組成。
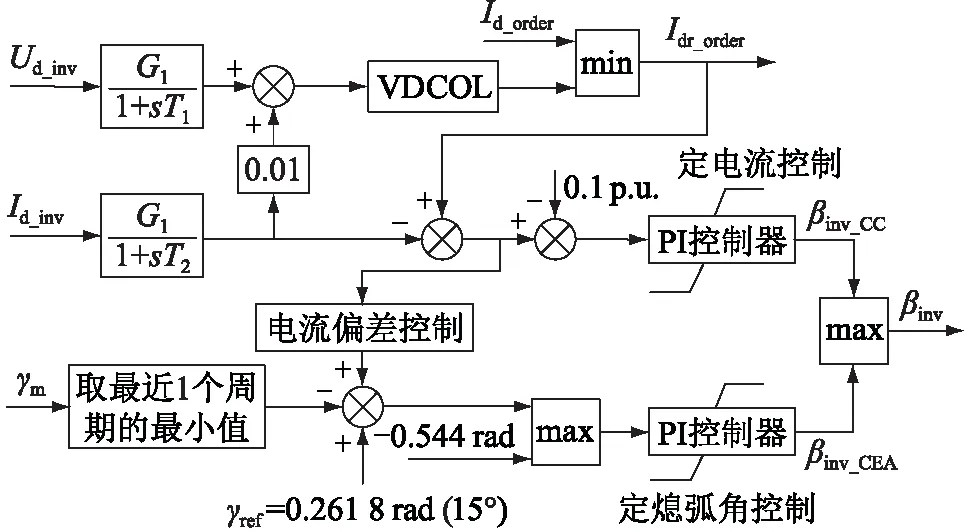
圖2 LCC-HVDC輸電系統逆變側的控制結構
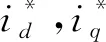
圖3 傳統的VSC矢量電流控制結構
2 換相失敗的基本原理
在換相過程剛結束時,若剛退出導通的閥在反向電壓作用的一段時間內未能恢復阻斷能力,或換相過程未能結束,則電壓轉向后被換相的閥將向原來預定退出導通的閥倒換相,稱之為換相失敗[7]。通常首次換相失敗都是由于逆變側交流系統故障導致換流母線電壓快速跌落,換相裕度不足,最終熄弧角γ小于固有極限熄弧角γmin。而在此期間控制器還來不及響應,因此首次換相失敗是很難避免的。逆變側熄弧角γ的計算公式為:
(1)
式中:k為逆變側變壓器變比;Id為直流電流;Xr為逆變側等效換相電抗;UL為逆變側交流母線線電壓有效值;β為逆變側越前觸發角。
連續換相失敗指直流輸電系統首次發生換相失敗后,再次發生換相失敗的現象[11,28]。連續換相失敗一般發生在直流系統的故障恢復過程中,此時部分電氣量已恢復到額定值左右,且直流系統的控制器有能力對系統進行調節以保持系統的穩定運行。因此,連續換相失敗主要是由決定γ大小的直流電流、換流母線電壓幅值和越前觸發角3個電氣變量互不配合及控制器交互不當導致的[10]。
換相失敗的根本原因是熄弧角小于其固有極限熄弧角,根據連續換相失敗的機理,分析式(1)可知,可分別針對決定γ大小的3個主要電氣變量開展抑制措施的研究[29]。文中重點從換流母線電壓角度進行改進,通過增加VSC-HVDC在故障期間輸出的無功功率,提高受端交流系統的無功電壓支撐強度,增大換相裕度。
3 混合多饋入直流輸電系統協調控制策略
為了解決VSC-HVDC因抑制連續換相失敗增發大量無功功率而導致輸送的有功功率受限的問題,文中提出可以在故障初期大幅度增發無功功率,而當受端換流母線電壓大于臨界換相電壓時,則通過動態改變功率外環輸出的限幅值迅速減少輸出的無功功率,同時加快有功功率的恢復。因此,文中提出了基于熄弧角偏差的無功附加控制和在自適應的電流限制策略[30]基礎上改進的動態功率限幅調節策略相結合的協調控制策略,其整體的結構如圖4所示。該策略可以通過動態調節功率外環輸出的上、下限幅值來改變其故障期間的暫態穩定運行點,快速改變VSC-HVDC輸出的有功功率和無功功率,既能在故障初期提供無功電壓支撐,又能較大限度保證有功功率的傳輸能力。
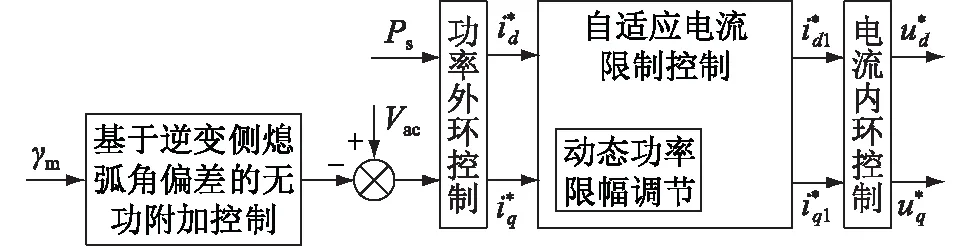
圖4 協調控制策略的整體結構
3.1 基于熄弧角偏差的VSC-HVDC無功附加控制
為了充分利用VSC-HVDC無功補償的能力,抑制LCC-HVDC連續換相失敗,根據文中對換相失敗的機理分析,可以將故障時根據γ的偏差量計算得到的補償量ΔVac附加至VSC-HVDC的無功外環控制,使得VSC-HVDC能在換相裕度不足時產生更多的無功功率,并同時加快VSC-HVDC的響應速度,提高VSC-HVDC對受端交流電壓的支撐能力。基于熄弧角偏差的無功附加控制的邏輯框圖見圖5。
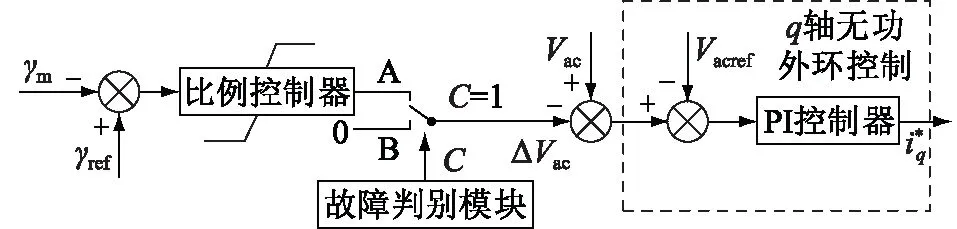
圖5 基于熄弧角偏差的無功附加控制的邏輯框圖
該控制計算得到補償值后還需要使能環節來控制其投入運行。使能選擇信號為故障判別模塊的輸出信號,當判別出故障發生時,其輸出信號置1,并維持到系統恢復至穩態值。故障判別方法不是文中研究重點,詳細控制邏輯框圖參考文獻[31]。
3.2 動態功率限幅調節策略

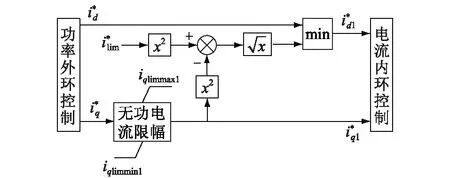
圖6 自適應電流限制控制邏輯框圖
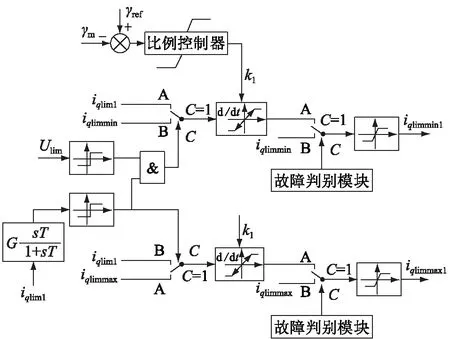
圖7 VSC-HVDC動態功率限幅調節邏輯框圖
圖7中,iqlimmax,iqlimmin分別為初始設定的靜態無功的上、下限幅值,k1為速率限制器的斜率;Ulim為LCC的臨界換相電壓,其計算公式見式(2)。其中,βN為逆變側的額定越前觸發角。
(2)
圖7中,iqlim1為根據瞬時功率理論計算得到,其計算公式為:
(3)
式中:QLCC為LCC-HVDC從受端交流系統吸收的無功功率;Sb為系統容量的基準值。根據鎖相環的控制理論,此處設定usq=0,usd=1,因此可得iqlim1的最終計算公式為:
iqlim1=QLCC/Sb
(4)
該控制策略包括如下部分:
(2) 斜率限制。考慮到VSC-HVDC的調節速度較快,故加入斜率控制器限制無功的變化速率,提高系統的穩定性。其速率控制器的斜率根據直流熄弧角偏差的大小來決定,即將熄弧角偏差經過比例控制器并限幅后得到。
(3) 使能環節。該控制策略中的使能控制與3.1節中的相同。
通過采用文中所提的協調控制策略,VSC-HVDC在故障初期可以快速增發大量的無功功率,進而使LCC-HVDC的直流電壓恢復速度加快,相應地,經VDCOL的直流電流參考值恢復速度也加快,因此在文中所提協調控制策略下,LCC-HVDC有功恢復速度將快于傳統控制策略下的恢復速度。同時雖然在故障初期文中所提的控制策略會因增發大量無功而導致其輸出的有功受到一定限制,但根據動態功率限幅策略的控制邏輯,當受端交流電壓大于臨界換相電壓時,控制器會迅速調節其限幅值,減少輸出的無功功率,進而加快其有功功率的恢復。 而文獻[8]所提的限制型VDCOL策略,雖然能抑制連續換相失敗的發生,但由于存在與VDCOL輸出的直流電流參考值取小的環節,因此其直流電流的恢復速度將受到限制,有功功率的恢復速度也會慢于傳統的控制策略。因此,在有功功率恢復方面,文中所提控制策略是優于其他控制策略的,可以較大限度提升直流系統的有功傳輸能力。

3.3 VSC-HVDC協調控制策略的實現流程
VSC-HVDC的協調控制策略主要包括基于熄弧角偏差的無功附加控制和動態功率限幅調節策略兩部分,其實現流程如圖8所示。
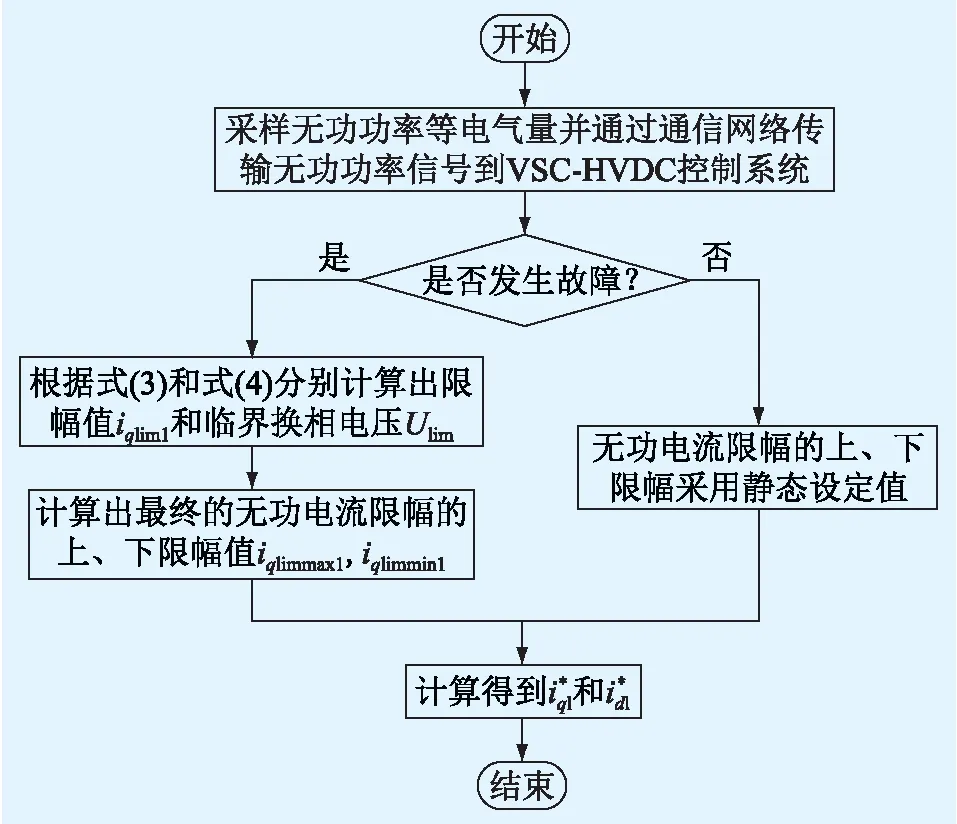
圖8 VSC-HVDC協調控制策略的實現流程
其具體步驟如下:
(1) 從LCC-HVDC受端換流站采樣其從交流系統吸收的無功功率、換流閥熄弧角和直流電流,并通過通信網絡傳輸到VSC-HVDC控制系統;
(2) 故障判別模塊判斷是否發生故障,是則跳轉至步驟(3),否則跳轉至步驟(5);
(3) 求取iqlim1,Ulim;
(5) 采用靜態設定的iqlimmax和iqlimmin作為無功電流限幅的上、下限幅值;

文中所提VSC-HVDC協調控制策略的信號傳遞如圖9所示。
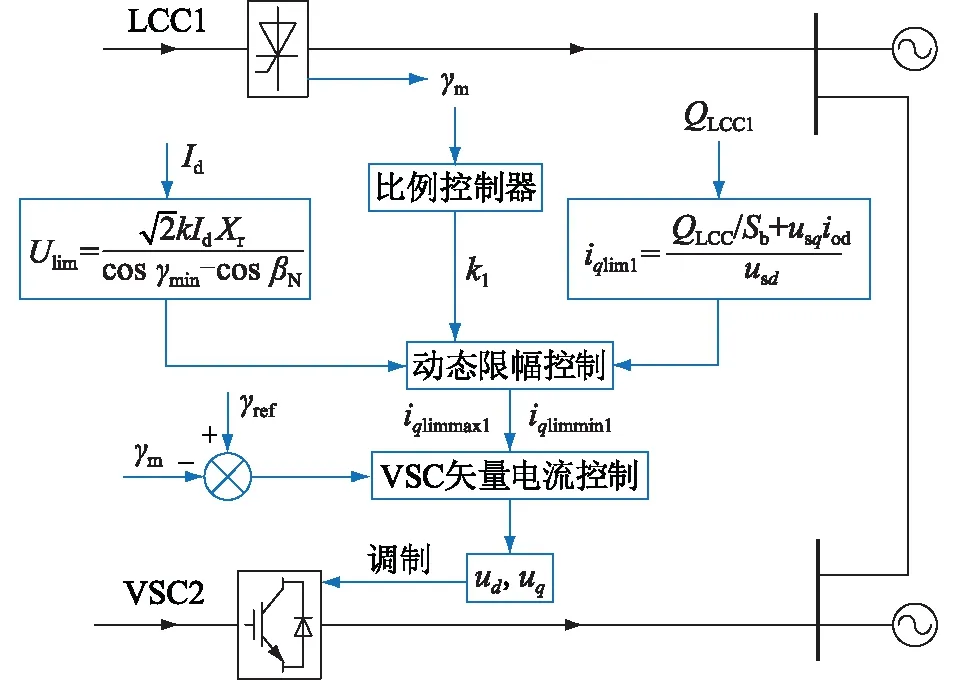
圖9 VSC-HVDC協調控制策略的信號傳遞
4 仿真分析
為了分析文中提出的協調控制策略在抑制LCC-HVDC換相失敗方面的效果,在PSCAD/EMTDC中搭建如圖1所示的混合雙饋入直流輸電系統模型。由于文中所提策略需要采樣LCC-HVDC換流站的電氣量后進行傳輸,信號傳輸過程中存在時間延時,因此此策略更適用于各受端換流站之間電氣距離較近的情況,故線路阻抗值Z12設置為3.6+j8.3 Ω。同時考慮文中所提控制策略的適用場景,為充分驗證其有效性,文中最大電流限制參考值i*lim設置為1.4 p.u.,受端交流系統短路比(short circuit ratio,SCR)值取為3。逆變側額定觸發角αN選取142°,最小關斷角γmin選取7°,LCC-HVDC和VSC-HVDC的其他主要參數見表1和表2。
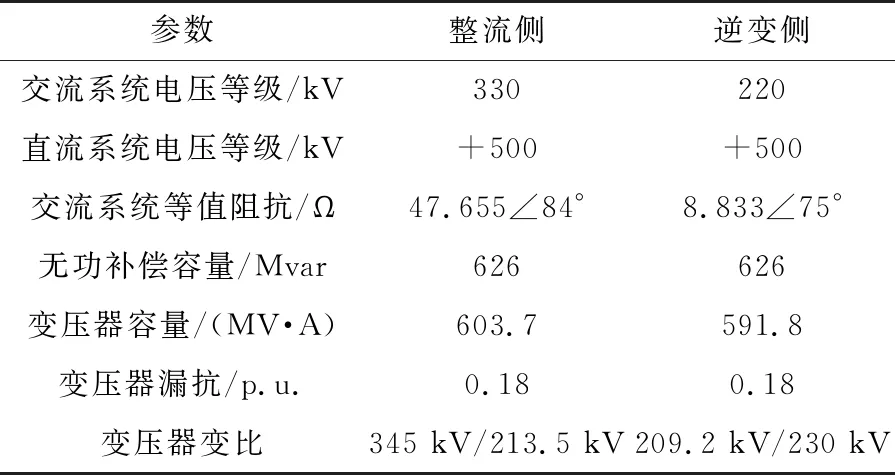
表1 LCC-HVDC測試系統具體參數
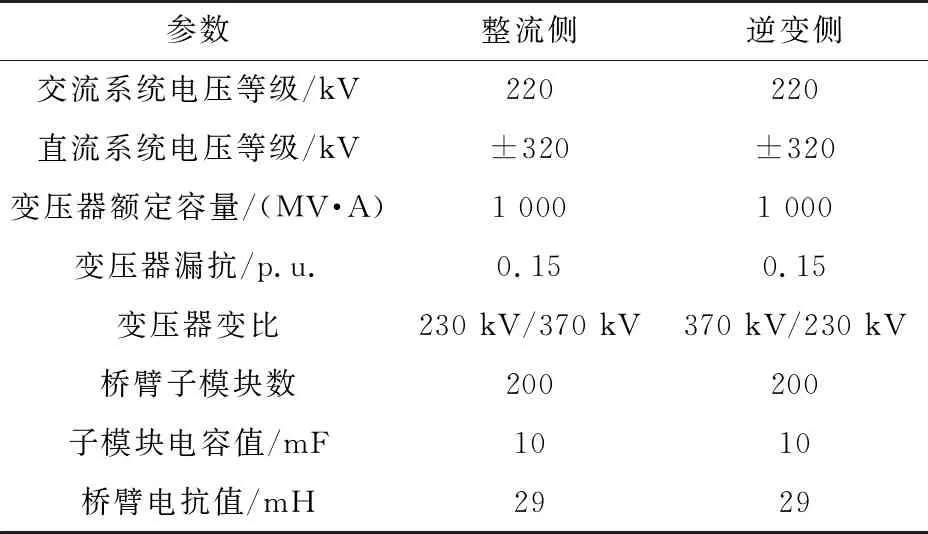
表2 VSC-HVDC系統具體參數
同時,設置了4組不同的方案進行對比分析,案例設置如下。
方案1:LCC-HVDC與VSC-HVDC均采用傳統控制策略。
方案2:LCC-HVDC采用文獻[11]所提的限制型VDCOL策略,VSC-HVDC采用傳統控制策略。
方案3:LCC-HVDC采用傳統控制策略,VSC-HVDC采用文中所提協調控制策略。
方案4:LCC-HVDC采用文獻[11]所提的限制型VDCOL策略,VSC-HVDC采用文中所提協調控制策略。
所有方案均對混合雙饋入系統仿真模型施加如下故障:系統穩定后,于5.0 s時在LCC-HVDC受端換流母線處施加三相接地故障,接地阻抗為6.5+j6.5 Ω,故障持續0.1 s,仿真從4.9 s運行至5.9 s。方案1、方案2、方案3和方案4時域仿真波形對比如圖10所示。
由圖10可知,方案1在受端交流系統故障后發生了2次換相失敗,導致直流系統輸送功率恢復較慢,且功率波動較大,故障切除后LCC-HVDC有功恢復至90%用時196.2 ms。而方案2、3、4均能抑制連續換相失敗的發生,故障切除后LCC-HVDC有功恢復至90%用時分別為81.55 ms,62.20 ms,66.30 ms。但是從圖10受端電壓和直流電流的波形圖可以看出,方案2與方案3抑制連續換相失敗的思路有著明顯的區別。由直流電流的局部放大圖可知,方案2是通過減小故障恢復期間的直流電流來增大LCC-HVDC的換相裕度,LCC-HVDC傳輸的有功功率恢復速率會較慢;方案3則充分利用了VSC-HVDC的容量裕度增發無功功率來提供無功電壓支撐,同樣提高了換相裕度,抑制了連續換相失敗的發生,且并沒有對直流系統傳輸有功的恢復進行限制,故傳輸的有功功率恢復速率較快。而方案4的故障恢復特性基本介于方案2和方案3之間,因采用2種改進控制策略來抑制連續換相失敗,其抵御連續換相失敗的能力更強,但有功功率的傳輸能力有所限制,故該方案可用于VSC-HVDC的無功容量不足以補償系統無功缺額時的場景。
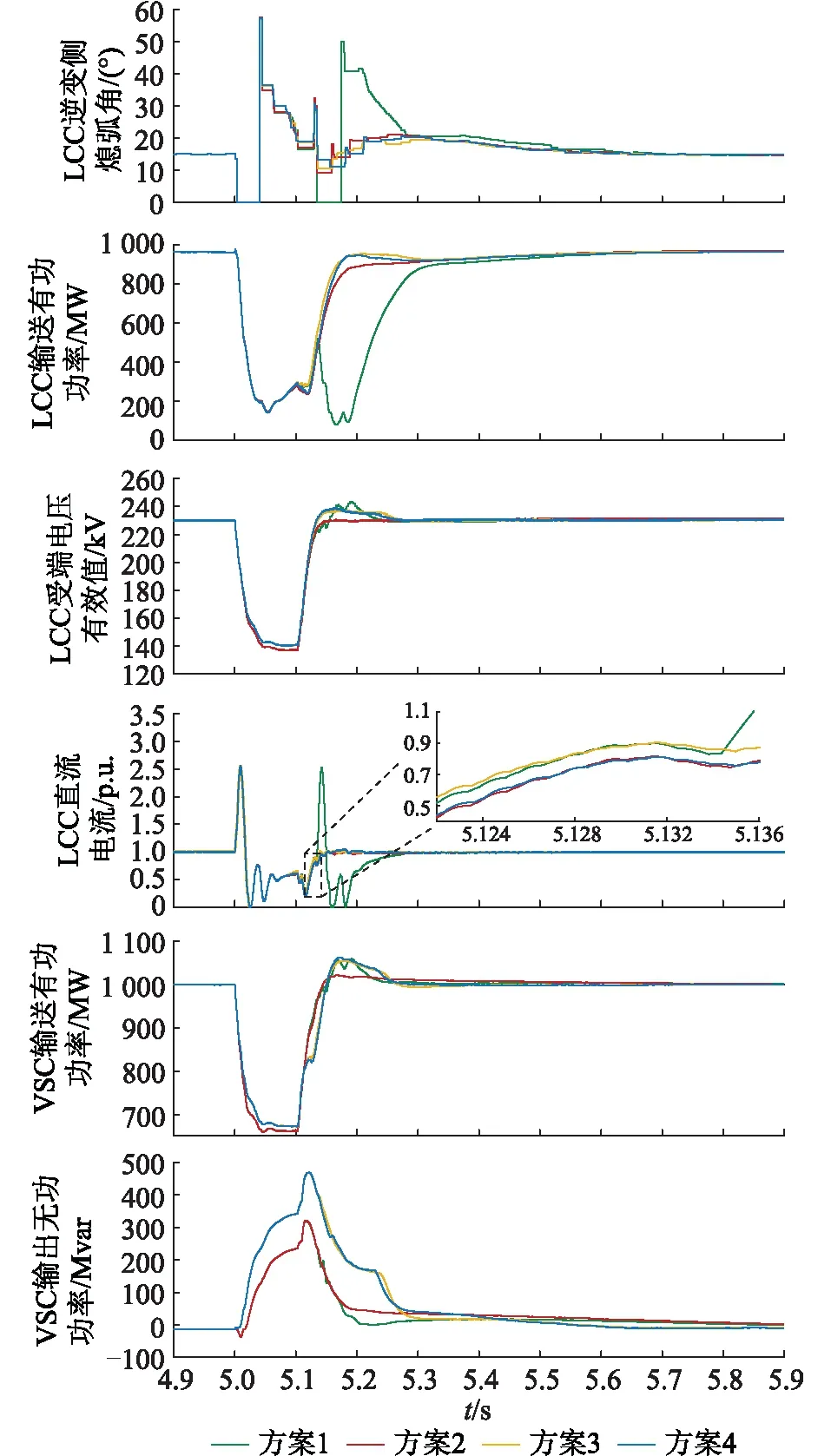
圖10 故障后逆變側控制系統響應過程
為充分驗證文中所提控制策略在不同故障嚴重程度下對連續換相失敗的抑制效果,仿真對比了三相對稱故障與非對稱故障下4種控制方案發生換相失敗的次數以及LCC-HVDC有功恢復至90%用時,以三相接地故障為例,其結果見表3—表6。
故障嚴重程度采用故障期間受端換流母線電壓跌落水平來表示。故障期間受端換流母線電壓有效值跌落在0.50~0.95 p.u.之間。三相接地故障時刻設置在5 s,故障持續時間為0.1 s。
由表3—表6可知,方案2、3、4均能有效抑制不同故障嚴重程度下的連續換相失敗。雖然3種方案均從抑制連續換相失敗的機理出發,但方案2以降低LCC-HVDC的傳輸有功為代價;而方案3的優
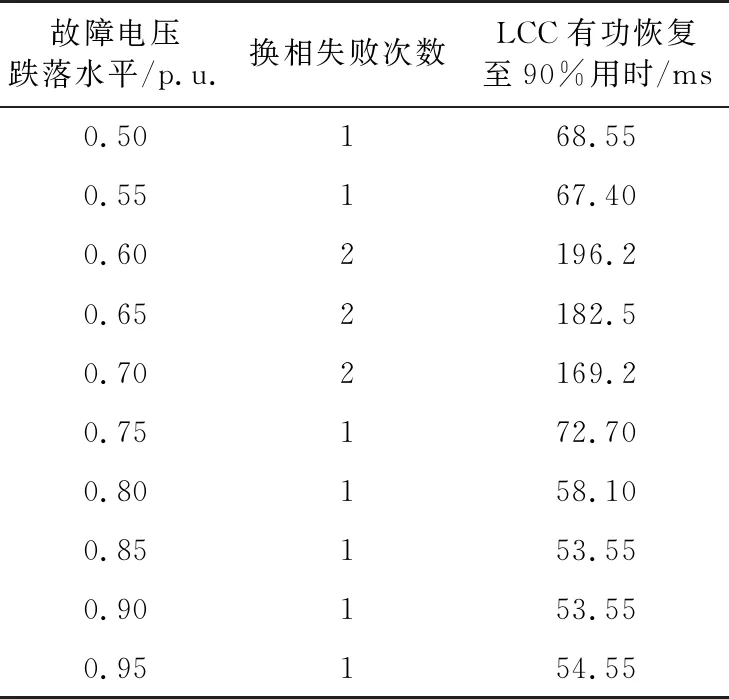
表3 方案1中直流系統的恢復特性統計數據
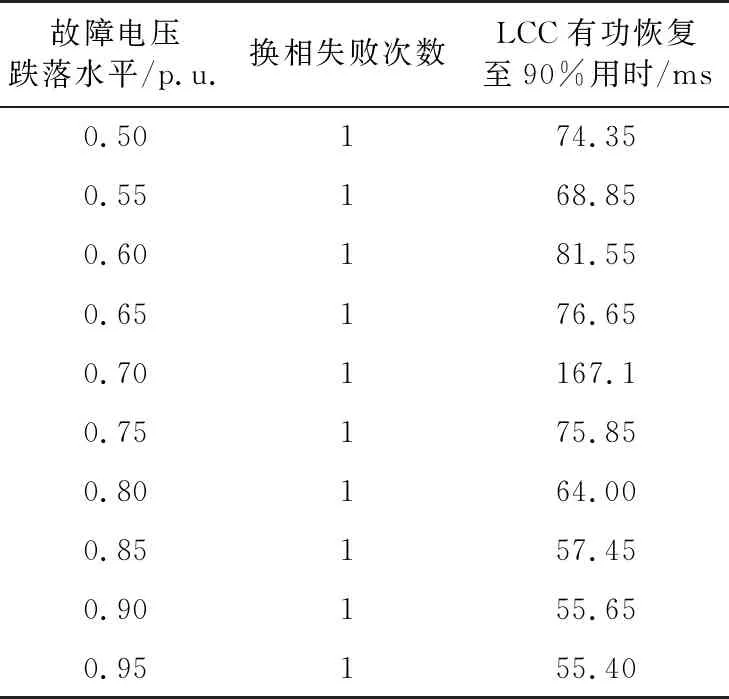
表4 方案2中直流系統的恢復特性統計數據
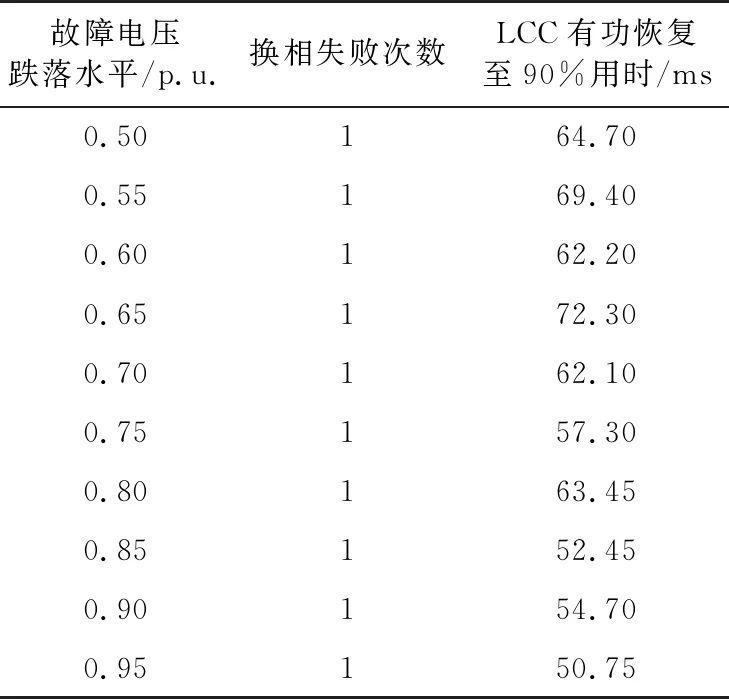
表5 方案3中直流系統的恢復特性統計數據
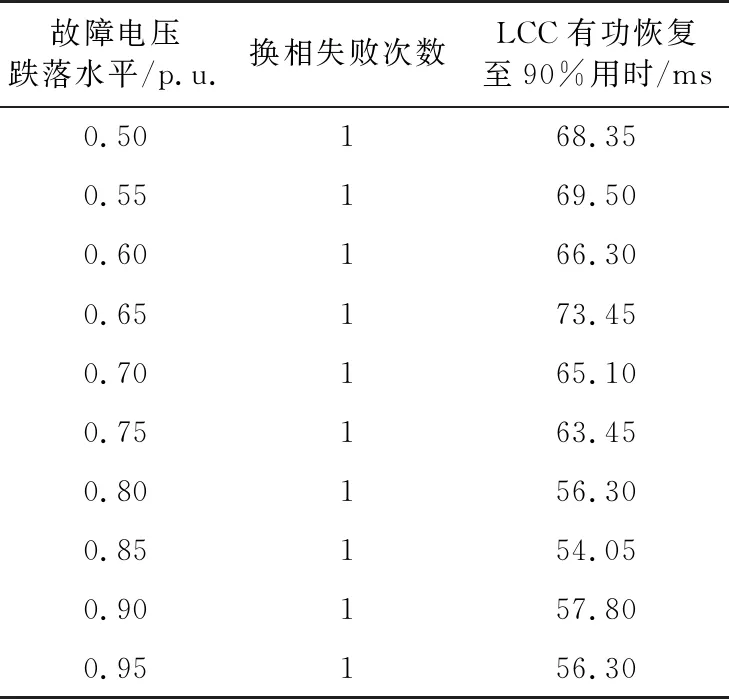
表6 方案4中直流系統的恢復特性統計數據
勢在于可以充分利用VSC-HVDC的容量裕度,發揮其無功電壓支撐的能力,因此故障期間LCC-HVDC輸送功率的恢復速度會快于方案2;方案4則介于方案2和3之間。綜上,在混合多饋入直流輸電系統下,為充分發揮VSC-HVDC的無功電壓調節能力,方案3會優于方案2,而當VSC-HVDC的無功調節能力達到上限時則可選擇方案4。
5 結語
文中提出了混合多饋入直流輸電系統抑制連續換相失敗的協調控制策略,即基于熄弧角偏差的無功附加控制和動態功率限幅調節策略相結合的控制策略。該策略將熄弧角裕度不足時的熄弧角偏差附加到VSC-HVDC的無功外環,加快在裕度不足時VSC-HVDC的響應速度;又通過采用動態功率限幅調節的控制策略,改變VSC-HVDC故障期間的暫態穩定運行點,既可以充分發揮VSC-HVDC無功快速調節的能力,快速補償故障恢復期間系統的無功缺額,抑制連續換相失敗的發生,又能較大限度提升故障恢復期間有功功率的傳輸能力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
通信電源技術(2016年1期)2016-04-16 04:57:26
