車輛緊急避撞控制系統研究
2021-12-09 06:37:48羅劍
微型電腦應用 2021年11期
羅劍
(陜西能源職業技術學院 智能制造與信息工程學院, 陜西 咸陽 712000)
0 引言
隨著社會的發展,科技不斷創新,許多智能系統逐漸走進大眾的視野,幫助人們能夠更優質地解決問題,正如在交通安全方面,車輛在緊急避撞系統設置中,安裝了智能檢測操控設備,它能夠融合多種計算數據,利用先進的雷達探測和傳輸圖像等技術,實時監測車輛的安全問題,能夠更加準確地獲得四周車輛的信息,并及時對車輛進行緊急避撞操作,保障汽車能夠安全行駛。
對此,文章進行了以下研究:對避撞系統的各項工作原理分析,運用圖像檢測車輛速度,計算安全距離范圍公式,根據傳感器時刻檢測與前車的距離變化,對應各種車輛行駛情況做出判斷,設計換道減速等避撞行動,并對車輛避撞系統的實際運行進行實驗。
1 車輛與前車運行狀況控制分析
在車輛行駛過程中,本車輛會通過接收器接收前方車輛的行駛速度情況和與本車相距情況,在這過程中,首先運用前方車輛的智能車監系統聯合安裝在車前的雷達產生環繞四周的球面毫米波,在接受散射的回波信號后,使發射信號與回波信號混頻,從而產生含有前車信息的中頻信號,進而提取出相應信息。前方車輛除了本車所在運行車道前的車輛外,行駛在左右兩車道的前方車輛也包括在內。若預設的最小安全值大于所測數據,則開啟自動換道控制系統[1]。自動換道控制系統的工作原理如圖1所示。
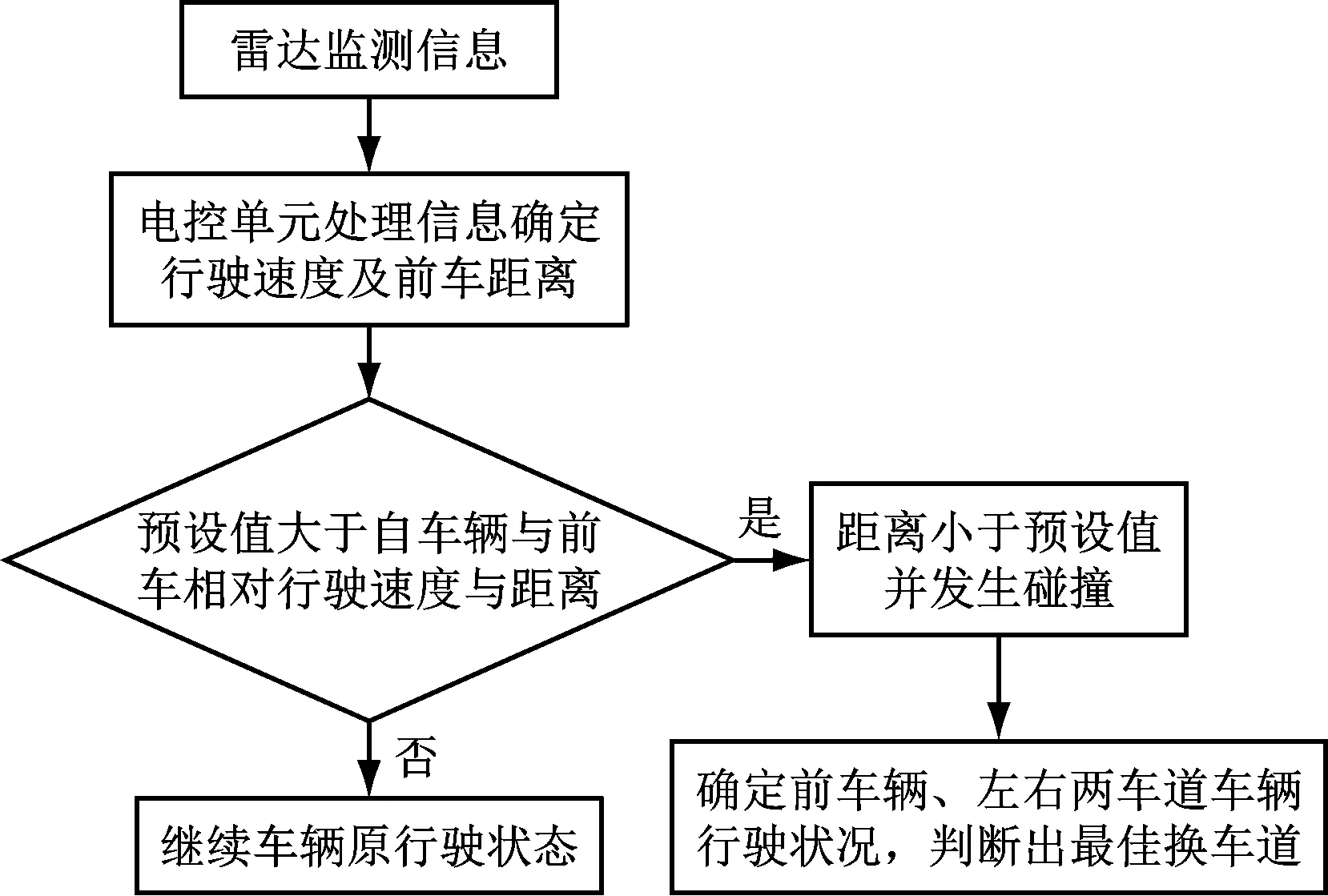
圖1 前車監測系統原理圖
經過電控單元處理信息對行駛速度以及前車距離進行確定,如果預設值低于自車輛與前車輛相對速度與距離,則車輛繼續原始行駛狀態。如果預設值高于自車輛與前車輛相對行駛速度與距離,則代表自車輛與前車輛存在碰撞風險,經過對前車輛及左右車道車輛行駛狀況判斷出最佳換車道。
在雷達系統中主要運用工作波長作為參變量,而毫米波雷達具有的顯著特點,對車用防撞系統的實際運用具有巨大優勢。雷達信號工作原理如圖2所示。
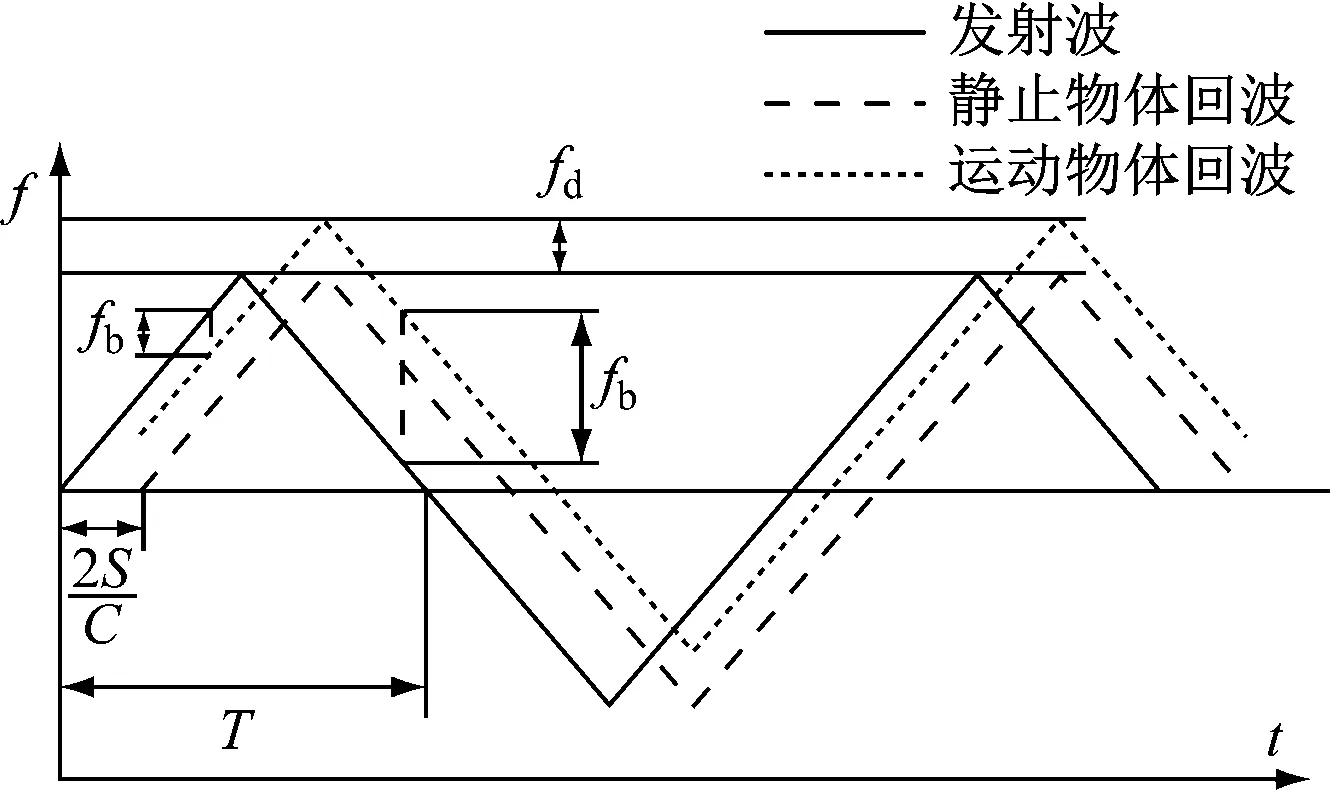
圖2 雷達信號工作原理圖
調頻連續波雷達的方式也直接關系到檢測數據的精密度,而連續波相比于其他測速雷達結構更加簡單,操作方便快捷,且有較高的精準度。在同時進行測量距離和速度兩項數據時,應選擇易調制、分辨率高、大頻寬、低功耗、性價比高的線性調頻連續波(LFMCW)的毫米波雷達。最后,調制波形要選擇能夠更加準確接受兩方面信息的對稱三角波雷達(FMCW),通過比較發出信號頻率和接收信號頻率的頻率之差,為系統計算出前方車輛的距離數據[2]。
在物體靜止狀態下時,如式(1)、式(2)。
(1)
(2)
其中,ft為發射波;B為頻寬;f0為中心頻率;T為調制周期;fr為靜止物體反射波;C為波傳播速度;S為被測距離。最后發射波與回收波混頻產生的中頻信號如式(3)。
(3)
則得出式(4)。
(4)
由式(4)得出,將中頻信號進行頻譜分析可計算出靜止車輛的距離S。
而通過多普勒效應得知出,波在波源與觀察者之間存在相對運動的狀態下,觀測頻率與波源頻率不相等。也就是多普勒頻移fd,而混頻后,上升頻段和下降頻段的差頻分別為fb-、fb+。則根據圖2可以推算出fb-、fb+與多普勒頻移fd的關系式為式(5)、式(6)。
fb+=fz-fd
(5)
fb-=fz+fd
(6)
由式(5)、式(6)可知式(7)、式(8)。
(7)
(8)
將式(7)代入式(4)得出式(9)。
(9)
再由多普勒效應可得知式(10)。
(10)
其中,被測速度為ν;信號的波長為λ。由式(8)和式(10)可計算得式(11)。
(11)
最后動態物體的距離和速度信息由式(9)和式(11)計算得出[3-4]。
2 車輛與兩側車道避撞原理分析
2.1 車輛換道避撞系統的運行
2.1.1 運用圖像傳感器監控兩側車輛信息,進行避撞控制及檢測原理
介于原始的車輛運行系統中,針對汽車兩側車輛的信息并沒有一個完善的監測裝置,這對行駛車輛兩側的汽車突發情況將存在安全隱患,為優化這一方面,在車輛自動駕駛過程中,為左右兩側車輛的檢測設置一套完整的避撞系統。用來傳輸車輛信息的圖像傳感器被安裝在車輛的左右位置,實時監測兩側車道的狀況。圖像傳感器主要運行原理是對兩側車道進行拍照,將收集到的圖像再進行數據分析,可檢測行駛車輛兩側有無車輛,進而發現沒有車輛運行的一側車道,或是有行駛速度相對本車輛慢的車輛所在車道,在運用前車運行狀態控制系統探測出左右車道前方沒有車輛行駛,或者行駛車輛車速大于本車輛行駛速度,兩種數據結合,可計算出滿足條件的安全車道供車輛進行換道[5-6]。運行車輛兩側車道監控系統原理如圖3所示。
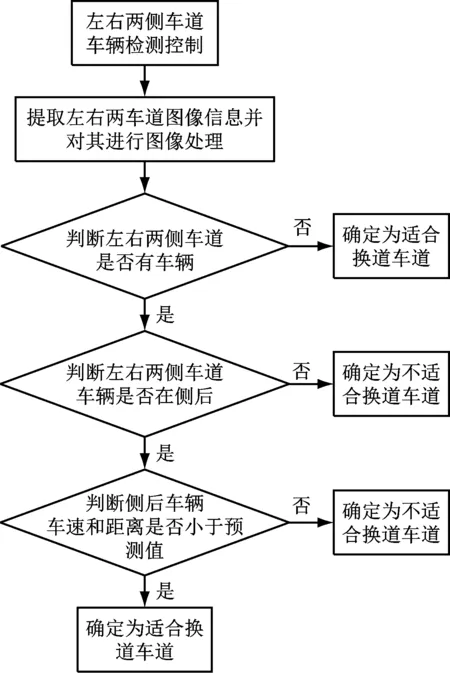
圖3 運行車輛兩側車道監控系統原理圖
車輛兩側車道監控系統會對兩側車輛進行檢測控制,提取左右兩車道圖像信息并且對信息進行處理,如果左右兩側車道無車輛,則判斷為適合換道車道,如果左右兩側車輛在側后方,則判斷為不適合換道車道,如果側后車輛車速和距離小于預測值,則判斷為不適合換道車道。
2.1.2 當側后方有車輛時,圖像傳感器的運行
圖像傳感器通過掃描收集的兩側車道對應信息,運用生成的圖片判斷出車道中是否有車輛行駛,原理是在圖像傳感器傳輸的圖片上,沒有車輛行駛的圖片只會顯示相應的車道信息,也就是說能提取完整車道信息的車道將被判斷成無車輛車道。而如果在運行車輛的側后方有車輛,需要測定出側后方車輛的行駛速度,則通過連拍圖像,收錄車輛的局部圖片,掃描車輛分別出現在圖像的哪個位置,運用位置變動計算出側后車輛的行駛速度,而在連續的照片中,車輛的局部顯示越來越靠近圖片后方的車輛即為速度較慢的車輛車道,由此則判斷出運行車輛兩側無車輛的一側車道,或側后方有車輛時行駛速度較慢一側的車輛車道,進而對自車輛實施換道避撞系統[7]。
在提取側后方行駛車輛的圖像時,應用Roberts算子邊緣檢測能更好地檢測出圖像信息,原因是側位車道噪聲較低,而Roberts算子具有定位精度高,對噪聲非常敏感的特點,使圖像處理效果更優越。
求像素點f(i,j)的梯度值計算式如式(12)。
(12)
設(i,j)代表邊緣像素點,THg為邊緣階躍的閾值,則ΓM(i,j)>THg。
利用Roberts算子計算ΓM(i,j)的近似值如式(13)。
P(i,j)=max{|f(i-1,j-1)-f(i+1,j+1)|,
|f(i-1,j+1)-f(i+1,j-1)|}
(13)
最后用式(14)作為ΓM(i,j)的近似值。
Γ(i,j)=|Δxf(i,j)|+|Δxf(i,j)|
(14)
3 車輛彎道避撞控制分析
在設計車輛換道避撞系統中,雖然可以很好地解決車輛在緊急狀態下的安全問題,但是并沒有將道路的其他狀態考慮在內,所以當出現彎道的避撞問題時,需要設定針對無法進行換道時的彎道避撞系統。在車輛的彎道避撞控制系統中,可運用車輛前置攝像頭對車道線進行監控,再使用傳感器測量出兩車實際相距,同時通過特定的安全距離模型計算出車輛的安全距離,用S表示,從而判斷出車輛與兩側車輛距離是否在安全狀況之內。如果測得的安全距離S大于實際測量距離s,則啟動轉向換道控制系統[8]。控制器邏輯結構如圖4所示。
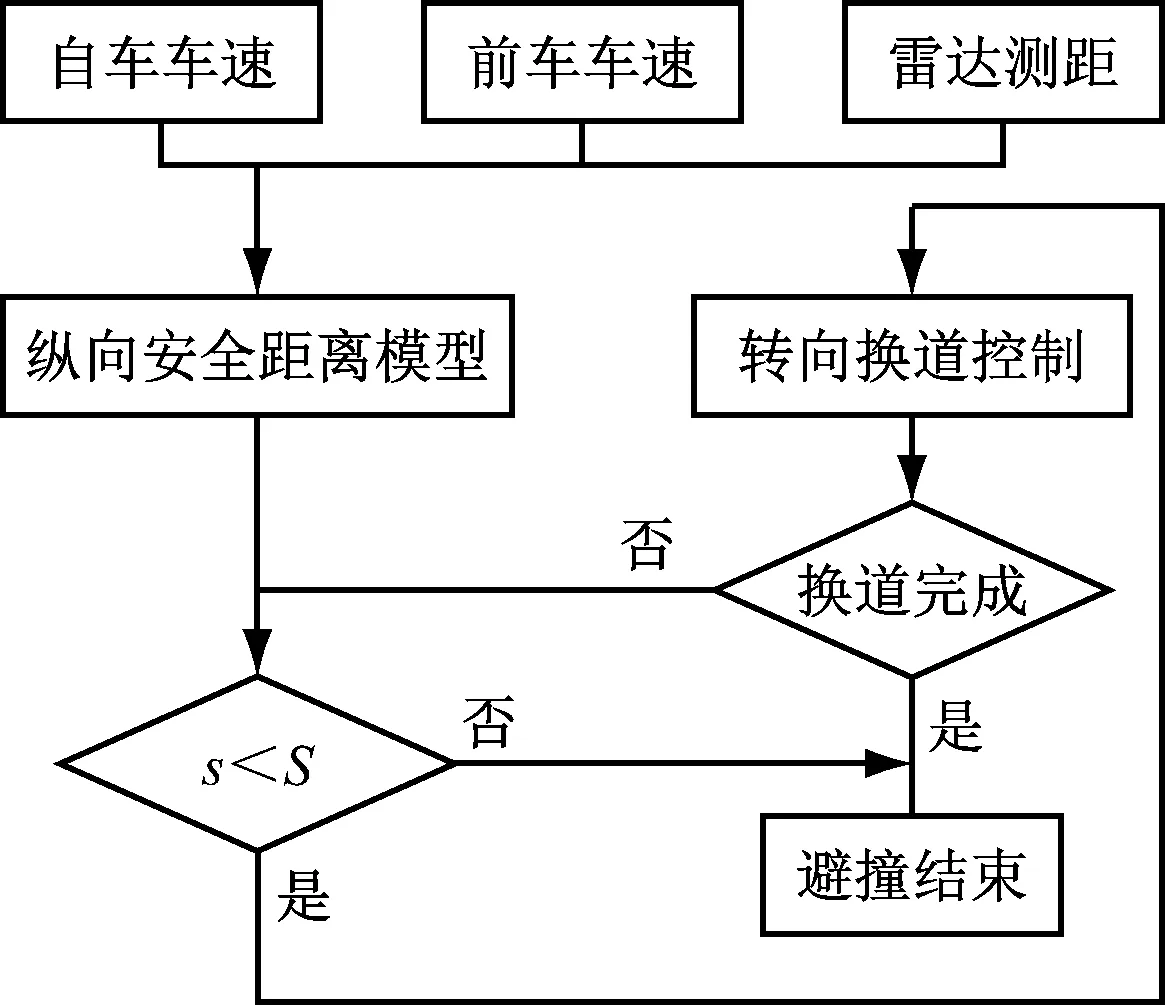
圖4 控制器邏輯結構
在運行彎道避撞系統的過程中,因位置變化產生了側向加速度和在行駛彎道時的向心加速度ac,從而求得避撞系統控制時車輛的實際側向加速度計算式為式(15)。
(15)
式中,設車輛在行駛時的側向位移是yd。
通過線性疊加車輛行駛彎道過程中的轉向盤轉角δ1與運行換道避撞系統時的轉向盤轉角δ2,得出由轉向逆動力學模型計算出的最適合的轉向盤轉角δ0,如式(16)。
δ0=δ1+δ2
(16)
將δ0與實際轉向盤轉角δsw進行對比,運用PID做為下層控制器,為了使δsw更好地追蹤δ0,適當對PID值進行調整。
4 車輛緊急避撞系統控制方法設計
4.1 安全距離算法
安全距離算法VTH的計算如式(17)、式(18)。
τ=τ1+τ2·νhost
(17)
dsafe=τ1·νhost+τ2·(νhost)2+dmin
(18)
兩車之間的時間間隔與本車輛的行駛速度之比為正數。而在式中,τ1、τ2的范圍是大于零的常數,其代表的數值不固定,具體因車輛行駛所在的環境變動而改變;兩車之間的時距常數由τ表示,τ值的取值在大于等于1 s且小于等于3 s之間;兩車間的安全距離為dsafe,單位是m;所在車輛的實時行駛速度為νhost,單位為m/s;dmin為靜止狀態下兩車間距離的最小數值,通常范圍在1.5—3 m之間[9]。而由于汽車在行駛過程中受到自身能承受的最高車速νmax所限制,所以表示兩車間距的計算式為式(19)。
(19)
因車輛間的相對速度會對車間時距τ產生變化,則在設計VTH安全距離算法時,可運用一個飽和函數sat(·)來代表車間時距τ,如式(20)。
(20)
式中,τ0和τh為車頭時距常數,大于0;sat(·)為飽和函數;νr為兩車間的相對速度,單位為m/s。
運用這種安全距離算法具有多變性,可更好地適應實際的道路交通情況,充分利用實際道路的特點,將道路行駛安全提高到最佳狀態。為車輛緊急避撞系統增加了保障。
4.2 下層控制器設計
首先在整體設計時,由上控制器的最佳加速度和實際行駛車輛的實時加速度組合成為下層控制器的輸入,輸出時為決定車輛狀態的油門控制開口加上制動壓力。用PID調制出期望加/減速度ades,作為供給驅動/制動切換模型做判斷的上層控制器,接著開啟驅動控制模型中的油門執行器或者制動控制系統的制動執行器,使其形成實際控制車輛行駛的油門開度和制動壓力,最終讓汽車能夠以理想的形態運行。標定工況作為汽車的初始速度,單位是km/h,CarSim2016和MATLAB/Simumink兩款軟件相互配合,首先在MATLAB/Simumink軟件中人工設置出5組期望加速度值,加速度數值需要大于-4 m/s2且小于4 m/s2,五組數值可分別為2、1、0.5、-1、-2 m/s2。在多次實驗標定參數后,得出最后一組最佳的參數:KP=2.34,Ki=0.5,Kd=0.012。
5 車輛緊急避撞系統測試驗證
在擁有較為完整的避撞系統后,為了測試車輛緊急避撞系統的實際效果,對彎道避撞系統進行演示,需要設定一個虛擬的場景進行實驗,考驗系統的有效性。首先利用PreScan軟件構建一個彎道避撞的場景,如圖5所示。

圖5 彎道避撞場景
為了演示更加貼合實際,假設出具體工況:運行車輛和前車輛共同行駛在外車道,本車輛正在勻速行駛,而前車輛正在實現緊急制動,并在一段時間后停止,同時所在彎道的內車道無行駛車輛[10]。
在前面所述的情境下,使車輛進行避撞系統控制,從而得出本車輛與前車輛的行駛軌跡的圖像,如圖6所示。

圖6 車輛行駛軌跡
兩輛車輛的運行軌跡形成一條不規則曲線,在測試之前,運行車輛的初始位置設置在外車道25 m處,而前車在距離本車輛32 m處。
開始后,測試情景為:前車在外車道25—56 m之間行駛時為勻速,與前車輛在相同車道上,某一時刻,前車突然進行緊急制動,而這時,本車輛將運用傳感器掃描出與前車的距離縮小,并小于安全距離時,這時開啟制動系統已經不能控制兩車輛的撞擊,則本車自行采取換道行動,進行避撞同時仍然勻速不變繼續行駛。從車輛行駛軌跡圖中可以看出,在58—70 m之間,本車輛的行駛軌跡出現了改變,這就說明,本車輛正是在此期間進行了換道處理,從外車道轉換到內車道。同時,前車在X=66 m時完成了緊急制動,而在整體的行駛曲線上,并沒有出現相交點,由此判斷出兩車沒有發生撞擊。
6 總結
本文通過了解車輛的智能車監系統和雷達信號器的各項工作原理,對前車運行狀況進行分析,在兩側出現車輛的狀態下,對車輛進行換道處理,結合圖像傳感器掃描道路中的其他車輛信息,判斷有無車輛行駛,且測量其行駛車輛速度,從而保證車輛與兩側車輛避撞過程中選擇最安全的一條轉換道路,而在行駛彎道時,通過傳感器與攝像裝置對前車進行測量和監控,再使用安全距離范圍計算式計算實際安全距離,保證在兩車相距小于安全距離時,正確啟動轉向換道控制系統,最后針對車輛緊急避撞系統需要發揮的作用特點,對此設計虛擬場景,進行實驗,目的是檢測避撞系統的實際應用情況,將避撞系統與實踐相結合。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
