一種煤礦井下環境安全勘測仿生機器人的設計
2021-12-09 06:37:46李亞文黃樂樂張文奕
微型電腦應用 2021年11期
李亞文, 黃樂樂, 張文奕
(商洛學院 電子信息工程與電氣工程學院, 陜西 商洛 726000)
0 引言
我國作為一個產煤大國,煤炭產出占世界35%,然而,在開采過程中煤礦井災害屢發不斷,每年因礦難死亡的人數占世界的83.7%[1],工人的生命財產安全和企業的收入受到嚴重的危及,在礦難發生時遇難人員平均只有約48小時的存活時間,且井下環境復雜,救援人員在深入井下后可能會遇到二次爆炸和坍塌等各種危險狀況[2-3]。基于目前的煤礦開采和救災狀況,井下環境探測機器人體積小、行動安靜又易于操控[4],能代替人工快速完成危險工作,在遠程監控、能源開發和搶險救援等方面的工作中都具有重大作用[5-6]。因此,本文合理分析了煤礦井下環境,設計了分別為嵌入式控制模塊、通訊模塊、數據采集模塊等為主要核心硬件,搭載遠程PC和機載PC進行數據采集和傳輸,實現了煤礦產井下環境安全探測仿生機器人的設計,并進了實驗測試。
1 系統整體設計方案
(1) 機器人理論設計
機器人理論設計可以分為硬件搭載平臺與軟件基本架構兩部分進行設計,如圖1所示。
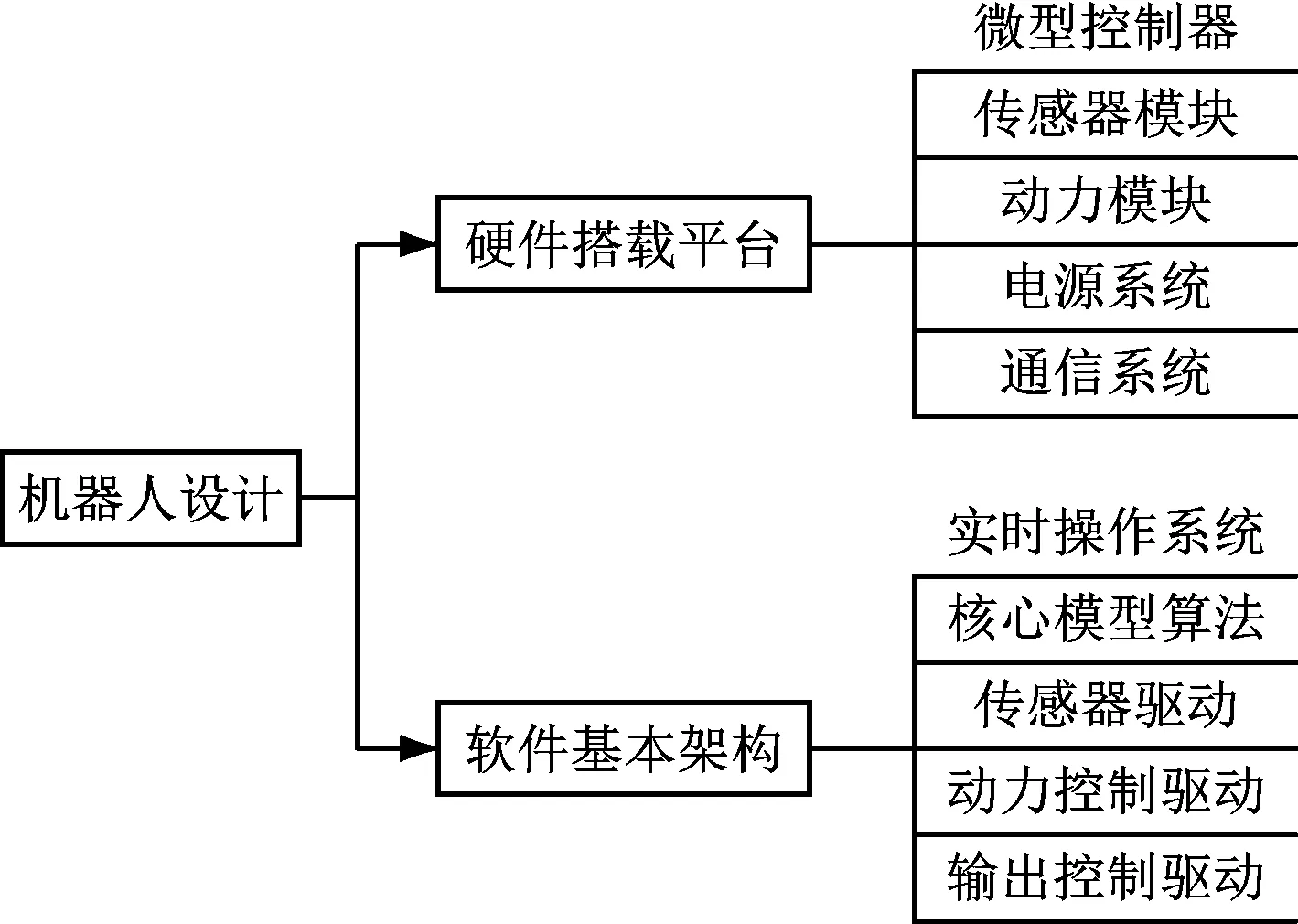
圖1 機器人設計理論框架
硬件是機器人的肉體,軟件是機器人的靈魂。微型控制器相當于機器人的大腦控制機器人的數據處理并提供反饋信息[7];傳感器模塊是機器人的感官,包含各種數據采集的基礎元件用于采集礦井內部所需要的環境信息[8-9];動力模塊是機器人的手腳,用于控制機器人的運動并且為數據采集提供便利的采集條件;電源系統為機器人系統提供電源支撐,是機器人運動和數據采集的基礎保障;通信系統保障良好的遠程通信能力,為數據傳輸和機器人控制提供有利保障[10]。這些都是機器人硬件平臺上所必需的基本模塊,是所有功能實現的基礎。
在硬件模塊的基礎上,用軟件賦予硬件以靈魂,以高效簡潔的模塊化設計方法為不同功能模塊設計處理程序。微型控制器安裝上思想即操作系統使之具有強大的思考能力和處理功能,為傳感器模塊、運動模塊、控制模塊設計相應的程序使之實現相應功能。軟硬結合設計實現嵌入式探測機器人的全部功能設計。
(2) 機器人設計原理
根據機器人設計理論框架按照功能可將其劃分為5個功能模塊,機器人系統設計方案如圖2所示。
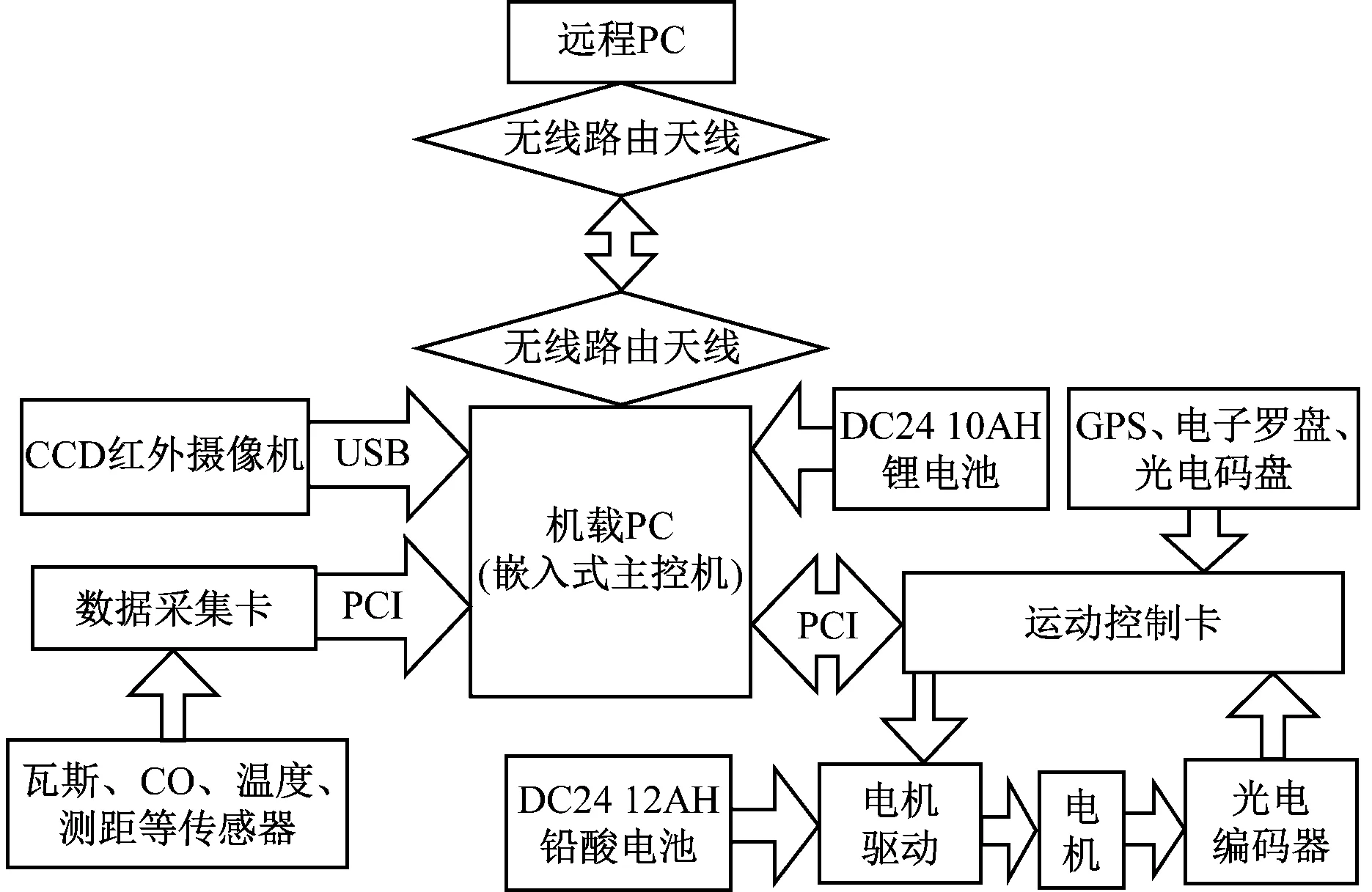
圖2 系統設計方案
分別為嵌入式控制模塊、電源模塊、驅動模塊、通訊模塊、數據采集模塊。遠程PC和機載PC是機器人的控制核心[11-12],負責所有的數據采集、信息交互及驅動控制。電源模塊負責為機器人內相關模塊供電及提供電源保護,驅動模塊執行控制模塊的指令控制機器人的運動和工作;通訊模塊負責機器人與遠程PC之間的數據交互[13];數據采集模塊是機器人功能實現的直接途徑,包括攝像頭、氣體傳感器、氣壓傳感器和一些姿位傳感器等[14-15],負責采集礦井內部作業環境和機器人工作狀態。
2 系統硬件設計
2.1 機器人硬件系統設計方案
為實現機器人總體設計中設計的機器人功能,機器人硬件系統總體設計如圖3所示。
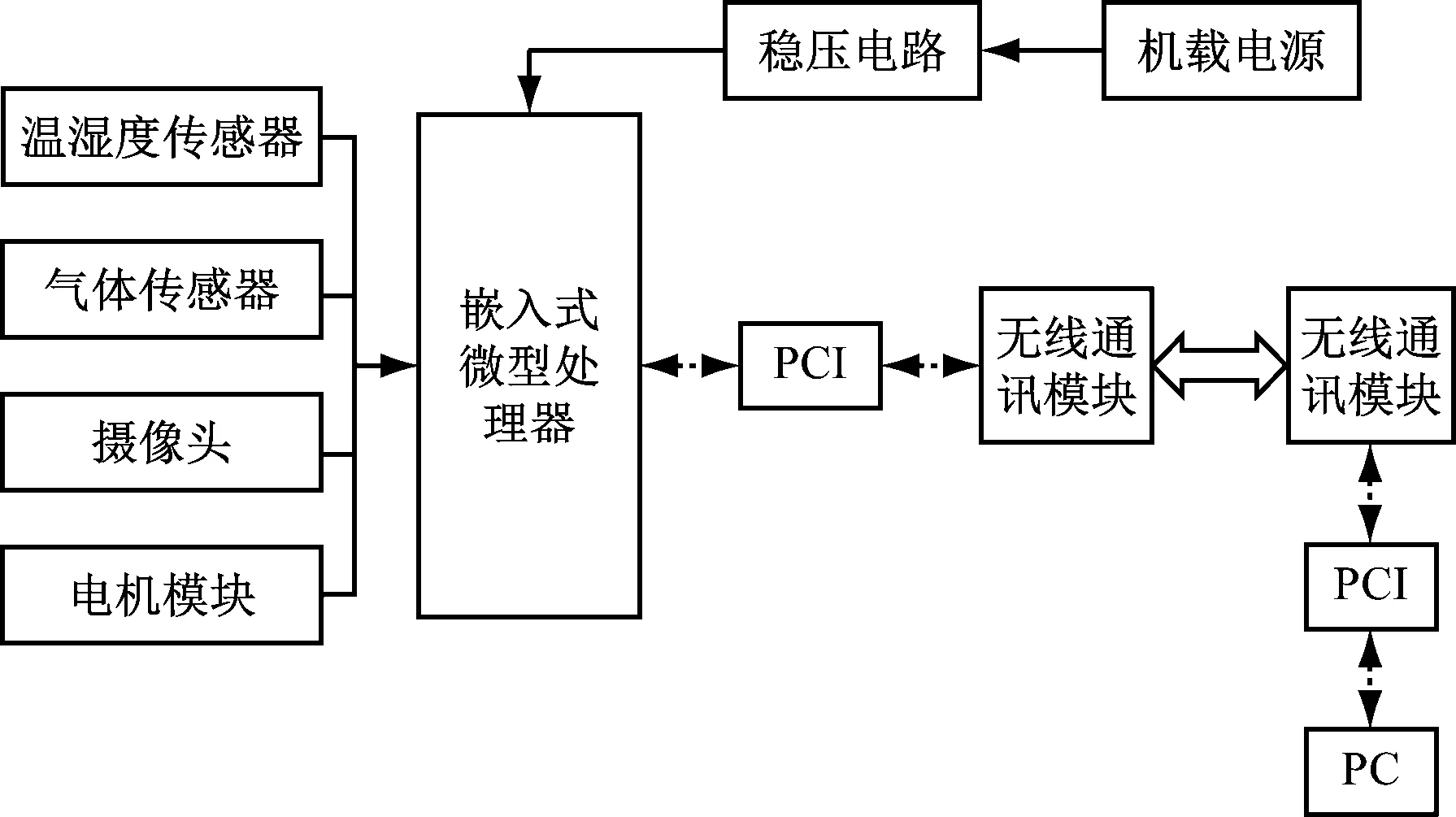
圖3 硬件系統總體設計
機器人采集的數據將通過總線串口傳遞到微型處理器處理,機載電源通過穩壓電路為所有功能模塊提供穩定的電源,處理器將數據處理后通過串口交由無線通信模塊發送給上位機的無線通訊模塊,數據再通過串口總線到達控制PC進行處理,方便工作人員處理。
2.2 電路原理圖
在確定設計方案后需要設計硬件電路來實現設計方案,部分硬件模塊電路原理圖如圖4所示。
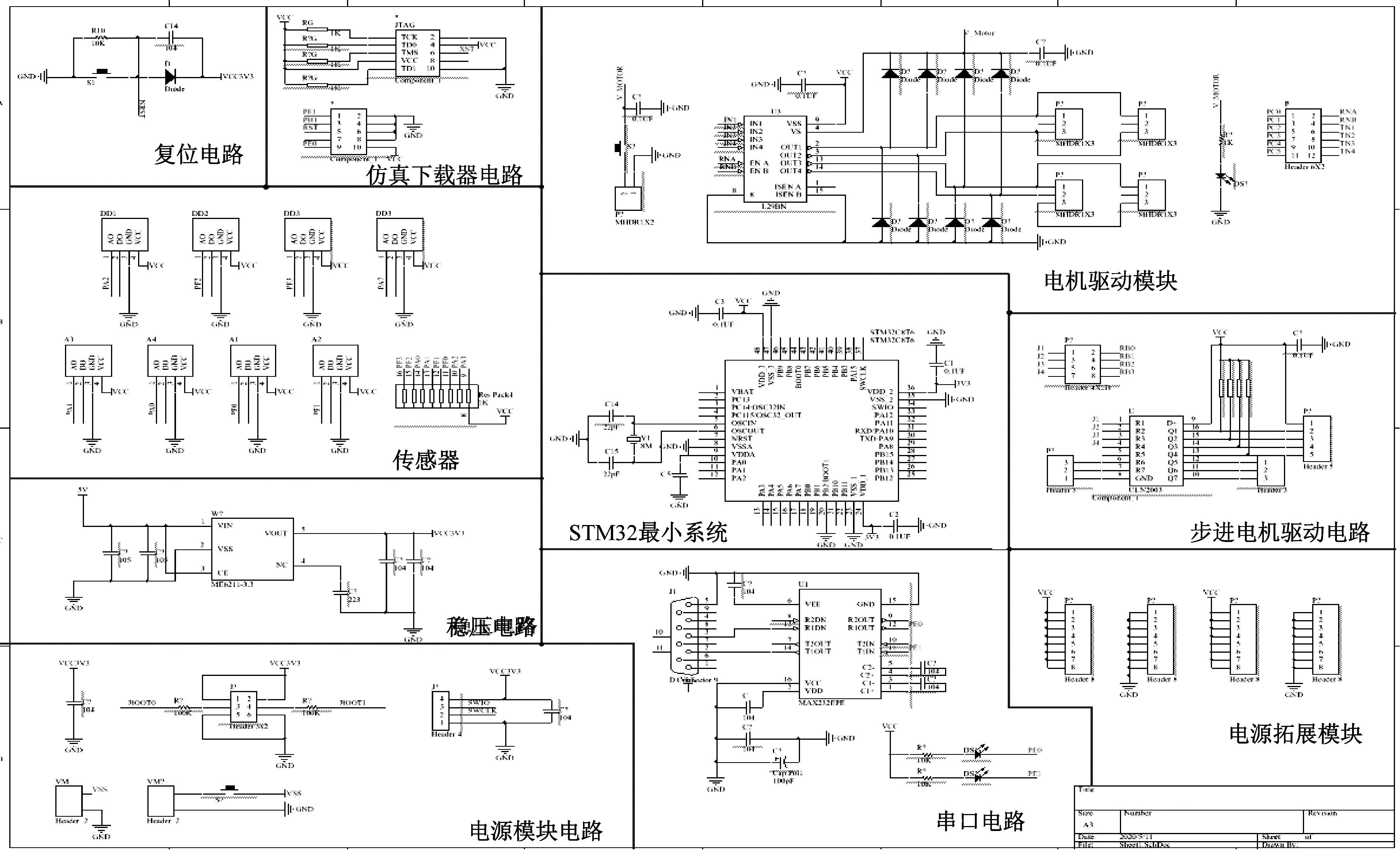
圖4 電路原理圖
其中主要包括電源模塊、傳感器模塊、電機驅動模塊、串口電路模塊、芯片最小系統的電路原理圖。根據電路原理圖便于機器人的電路仿真設計實現,根據原理圖可以設計相應的PCB電路板,便于根據電氣特性排線布線優化電路。
在確保設計原理的正確性的同時還要考慮電路的電氣特性,必需適合所選硬件的電氣特性。然后再考慮電路的魯棒性、穩定性和優化等一系列工作。所以硬件器件選型和電路設計是整個系統實現中最關鍵的部分。
2.3 機器人車體結構設計
機器人的車體結構為機器人的主要硬件部分,機器人的移動機構又是整個機器人正常工作的前提[10],要讓機器人實現預定的功能,不僅要使執行機構能完成機器人運動的要求,還要考慮其可靠性和穩定性。針對礦井內部復雜的環境情況,選擇對環境適應能力較好的輪履式機器人作為硬件的移動搭載平臺,其結構如圖5所示。
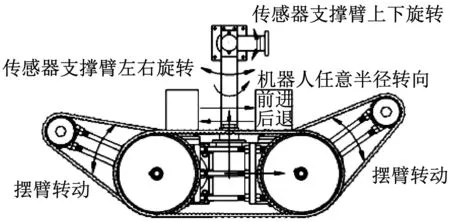
圖5 機器人車體結構
這是整個機器人平臺的基礎部分。機器人通過履帶移動,可旋轉的擺臂調整自身體位姿態,幫助機器人實現越障和攀爬的功能,機器人中間的平臺可供攝像頭和某些數據采集模塊使用,可旋轉的平臺使數據采集更加靈活,可以獲得更大范圍內的環境信息,將為機器人的導航奠定較好的基礎。
3 功能實現
將所有軟件程序組合在一起形成一個完整的遠程控制系統,如圖6所示。
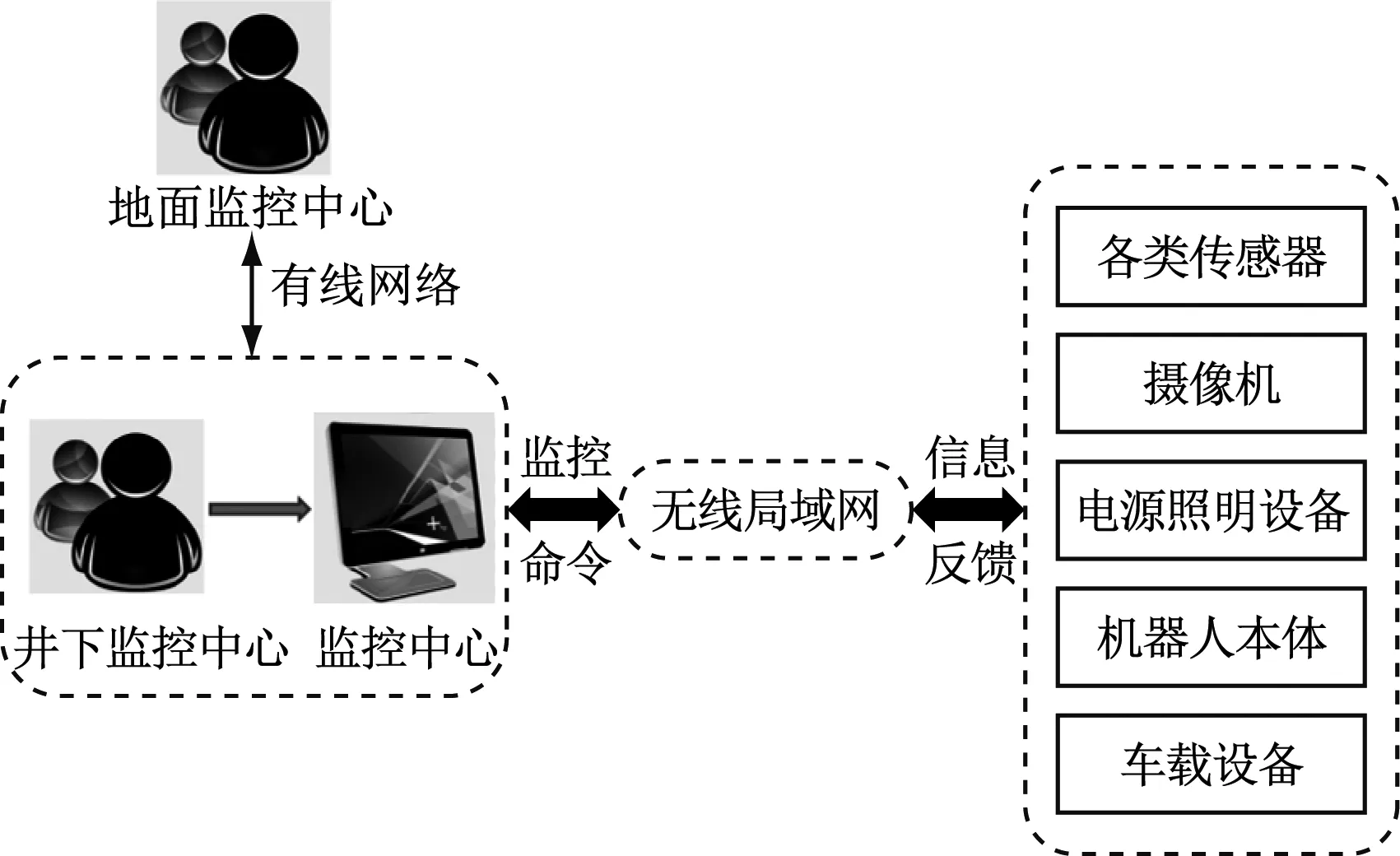
圖6 遠程控制系統運作圖
基于嵌入式的遠程控制系統主要包括:地面監控系統、井下監控系統和數據采集系統。其中,數據采集系統主要由各類傳感器、攝像機、車載設備和機器人車體構成,主要通過仿生履帶式結構的機器人行走采集井下的瓦斯氣體、CO、溫度、濕度、故障距離、環境圖像視頻等,通過無線局域網傳送給井下的監控設備,進行危險因素的預警,同時通過有線網絡傳送給地面的監控中心進行報警處理。該系統的具體功能實現主要有4個方面。
(1) 初始化機器人設備驅動如傳感器、攝像頭、電機等模塊驅動,并設置其運作模式。
(2) 監控由無線網絡傳送的來自上位機的控制指令,然后根據指令向機器人內部的總線發送不同指令,使機器人完成指定功能。
(3) 監聽機器人內部總線上的來自電機及信息采集板的機器人內部、外部狀態信息,并根據預先設置處理信息并返回給上位機。
(4) 將視頻處理單元處理后的圖像數據傳送給上位機。
由于核心數據處理單片機處理量較大,而運動控制也需要占用許多硬件資源,所以為了降低主處理器的運算壓力,本文采用雙MPU的結構[16],從運動處理器負責對運動的獨立控制,運動處理器作為子處理器受主處理器控制,而主處理器負責視頻數據和環境數據的采集與傳輸,攝像頭是ov7670,網卡采用enc28j60移植的lwip協議[17],兩款單片機均由FreeRTOS進行任務管理。
4 功能測試
(1) PC上位機控制軟件測試
上位機控制軟件運行圖如圖7所示。

圖7 PC控制軟件運行圖
圖7為便于操作和獲取機器人信息,設計界面簡潔使用方便的上位機操控軟件,并能清晰明了地獲取礦井機器所探查的礦井環境如各種氣體濃度、溫濕度、圖像信息等。
(2) 經過聯機調試,上位機能正常穩定工作,能達到預期設計要求。通過密閉的空間每2分鐘記錄一次,測試氣體濃度(以氧氣為例),將其結果與色譜儀進行對比計算誤差,測得結果如表1所示。
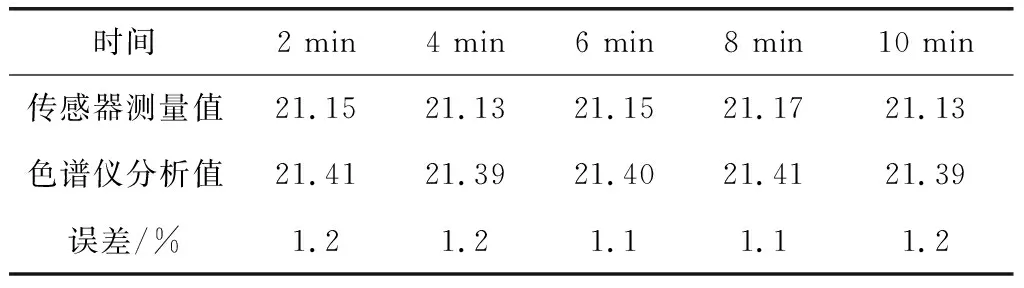
表1 氧氣濃度測試
將機器人的溫度傳感器放入約19攝氏度密閉加熱箱中,測試機器人溫度傳感靈敏程度,每2分鐘記錄一次,記錄結果與正常溫度計進行對比計算誤差,測量結果如表2所示。
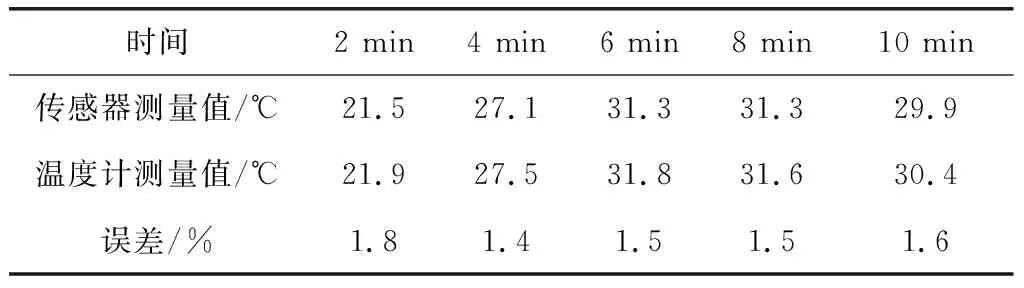
表2 溫度傳感器測試
對比計算結果,機器人傳感器與標準值之間的誤差都不高于2%,足以滿足探測機器人所需的精度要求。
(3) 控制軟件可以控制機器人的前進、后退、轉向等操作,攝像頭采集數據正常且流暢并能通過預期設計的平臺實現旋轉拍攝。拍攝圖像清晰,如圖8所示。

圖8 控制機器人數據采集模擬
圖像能夠通過上位設計程序將圖像保存成照片在本地文件夾中,如圖9所示。
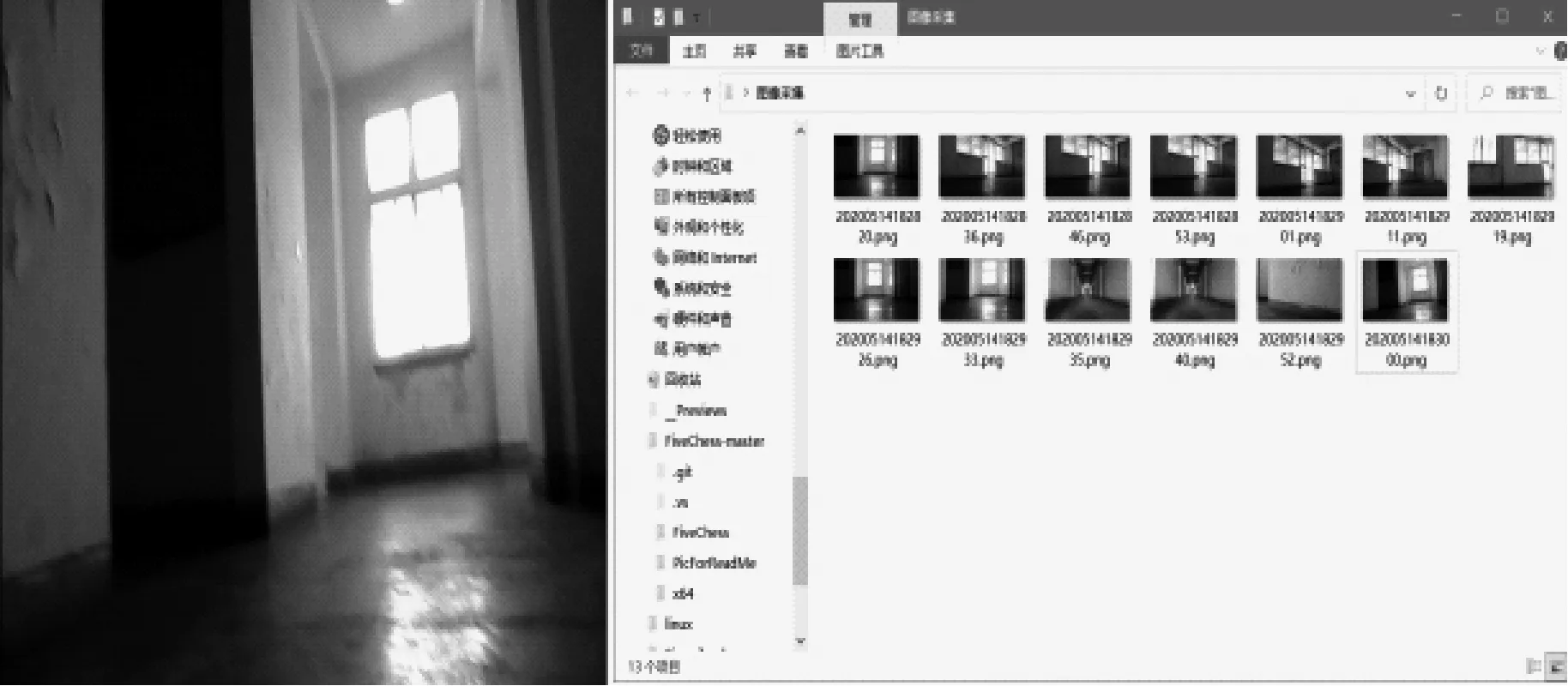
圖9 攝像頭環境數據采集測試與保存
5 總結
通過分析礦井環境探測機器人所具備的功能,從硬件和軟件為切入點完善的介紹設計礦井環境探測機器人的整體實現方案,從硬件的車體設計、電路設計和元件選擇,到軟件的操作系統的選擇、通信的實現、功能設計等方面介紹了機器人的設計實現過程。機器人能夠通過傳感器和攝像頭采集周圍環境數據和視頻信息,通過無線網絡傳遞給上位機顯示。對控制系統、傳感器精度、數據采集進行測試,測試結果均符合預期設計要求。但機器人對圖像處理、自動避障功能還未完善,系統局限性較大[18],且探測機器人還應該具有PSD、DA、DI檢測、定位、陀螺儀、云控制等功能,讓機器人更加智能化,為我國礦業開采安全做出貢獻。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
