一種提高舵機系統動態特性的插值方法
2021-12-09 06:59:40張少應陳明哲
微型電腦應用 2021年11期
張少應, 陳明哲
(1. 西安航空學院計算機學院, 陜西 西安 710077; 2. 西安電子工程研究所, 陜西 西安 710100)
0 引言
在對舵機系統施加正弦激勵信號,進行頻率特性測試過程中,舵機指令的密度往往對測試結果起到了至關重要的作用。指令越密集,舵機位置反饋測試曲線越平滑,跟隨指令的實時性越好。反之,指令越稀疏,低頻時舵機系統的相位延遲越大,高頻時舵機位置反饋測試曲線的失真度越高。
為了適應不同密度的舵機指令,保持舵機系統頻率特性測試數據的一致性,可以利用插值的方法對指令進行插值計算[1]。插值法種類較多,包括拉格朗日多項式插值、分段線性插值及三次樣條插值[2]。在實際應用中,往往要綜合考慮插值的精度、效率、運算量等因素來選擇合適的插值方法。
本文采用拉格朗日(Lagrange)外插法估算舵機的位置指令,替代接收到的位置指令,通過增加指令點數,注入更加平滑的位置參考輸入,從而改善系統的動態響應性能[3]。
1 插值原理
根據給定的函數表構造一個既能反映函數f(x)的特性,又便于計算的簡單函數p(x)來近似f(x),并使得p(xi)=f(xi),(i= 0,1,2,…,n),這就是插值法[4]。
Lagrange插值是n次多項式插值方法,可以給出一個恰好穿過二維平面上若干個已知點的多項式函數。
對某個多項式函數,已知有給定的n+1個取值點為式(1)。
(x0,y0), (x1,y1),…, (xi,yi),…,(xn,yn)
(1)
其中,xi對應著自變量的位置,而yi對應著函數在這個位置的取值。
假設任意兩個不同的xi都互不相同,那么應用Lagrange插值公式所得到的Lagrange插值多項式為式(2)。
(2)
其中,每個li(x)(i=0,1,2,…,n)為Lagrange基本多項式(或稱插值基函數),其表達式為式(3)。
(3)
1.1 線性插值
當n=1時,Lagrange多項式插值為線性插值,表示為式(4)。
L1(x)=y0l0(x)+y1l1(x)
(4)
用通過兩點(x0,y0)、(x1,y1)的直線y=L1(x)來近似代替曲線y=f(x),其中插值基函數為式(5)、式(6)。
(5)
(6)
1.2 拋物線插值
當n=2時,Lagrange項式插值為拋物線插值,表示為式(7)。
L2(x)=y0l0(x)+y1l1(x)+y2l2(x)
(7)
用通過三點(x0,y0)、(x1,y1)、(x2,y2)的拋物線y=L2(x)來近似代替曲線y=f(x),其中插值基函數為式(8)—式(10)。
(8)
(9)
(10)
1.3 外推算法
插值包括內插(Interpolate)和外推(Extrapolate)兩種算法。內插算法:通過已知點的數據推求同一曲線上未知點數據。外推算法:通過已知曲線上的數據,推求曲線之外區域的數據[5]。Lagrange插值公式內插算法和外推算法都適用。
頻率特性測試時,舵機系統指令的幅度為1°的離散正弦指令,即式(11)。
y=f(t)=1°sin(ωt)
(11)
其中,ω為角頻率,單位rad/s;指令間隔時間ΔT為5 ms。為提高指令密度,在每2個5 ms指令之間插入4個指令,將指令間隔時間ΔT縮小到1 ms。
為提高舵機指令的實時性,可采用外推算法對指令進行預測,預測算法可以有效減小延遲影響[6]。根據已知的前幾個時刻的指令及當前時刻的指令,分別用線性外推法和拋物線外推法來預測下一個5 ms內的正弦指令變化趨勢。
1.4 外推公式推導
(1) 線性外推
線性外推法是最簡單的預測法,根據已知兩點確定的直線來推斷事物未來的變化。設(x0,y0)、(x1,y1)分別為-5 ms、0 ms時刻的指令坐標,根據式(5)、式(6)計算直線的插值基函數,為式(12)、式(13)。
(12)
(13)
根據式(4)得線性外推的指令計算式為式(14)。

(14)
(2) 拋物線外推
拋物線外推法根據已知3點確定的拋物線來推斷事物未來的變化。設(x0,y0)、(x1,y1)、(x2,y2)分別為-10 ms、-5 ms、0 ms時刻的指令坐標,根據式(8)—式(10)計算拋物線的插值基函數,為式(15)—式(17)。
(15)
(16)
(17)
根據式(7)得拋物線外推的指令計算式為式(18)。

(18)
在式(14)、式(18)中,x為時間變量,單位ms,取值為0,1,2,3,4。
1.5 外推算法實現
軟件中設置1 ms中斷定時器,用于插值計算。實現方法如下。
(1) 當接收到新的舵機位置指令時,將插值計數值清零,即x=0;并將當前的新指令(0m時刻)作為掃頻指令;同時進行指令迭代,更新并保存最近2次(線性外推法)或3次(拋物線外推法)的指令;
(2) 當定時器中斷發生時,插值計數值x加1,即當x等于1,2,3或4時,根據式(14)或式(18)計算插值后的指令,并將該指令作為本次的掃頻指令;
(3) 當插值計數值x等于5時,將計數值x清零,即x=0;
(4) 重復前面的步驟1—3,可實現指令插值。
2 仿真驗證
在MATLAB/Simulink下,編寫用戶自定義的線性外推和拋物線外推函數,對5 ms正弦掃頻指令進行1 ms插值。1°,3 Hz離散正弦指令的插值仿真圖如圖1所示。1°,10 Hz離散正弦指令的插值仿真圖如圖2所示。
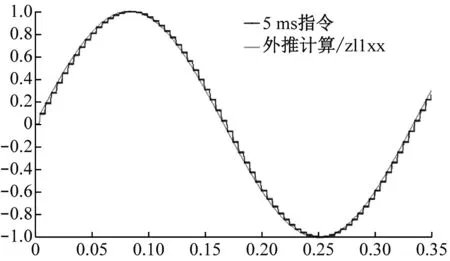
(a) 3 Hz線性插值
從圖1、圖2中可以看出,指令經過插值曲線更加平滑;指令插值后正弦曲線的相位整體前移;指令頻率較低(3 Hz)時,線性插值和拋物線插值效果一致,當指令頻率較高(10 Hz)時,拋物線插值的效果明顯優于線性插值,因此高頻時優選拋物線插值。
在Simulink下,保持某舵機系統所有控制參數不變的條件下,將拋物線插值后的指令作為正弦激勵信號,對舵機系統的頻率特性進行仿真。1°,3 Hz正弦指令插值前后舵機系統的動態響應情況,如圖3所示。
從圖3中可以看出,指令插值后,舵反饋信號跟隨指令信號的實時性更好;當指令過零點時,舵反饋信號過零點的時間在插值前是0.352 s,而在插值后是0.344 s,滯后時間減小了8 ms。
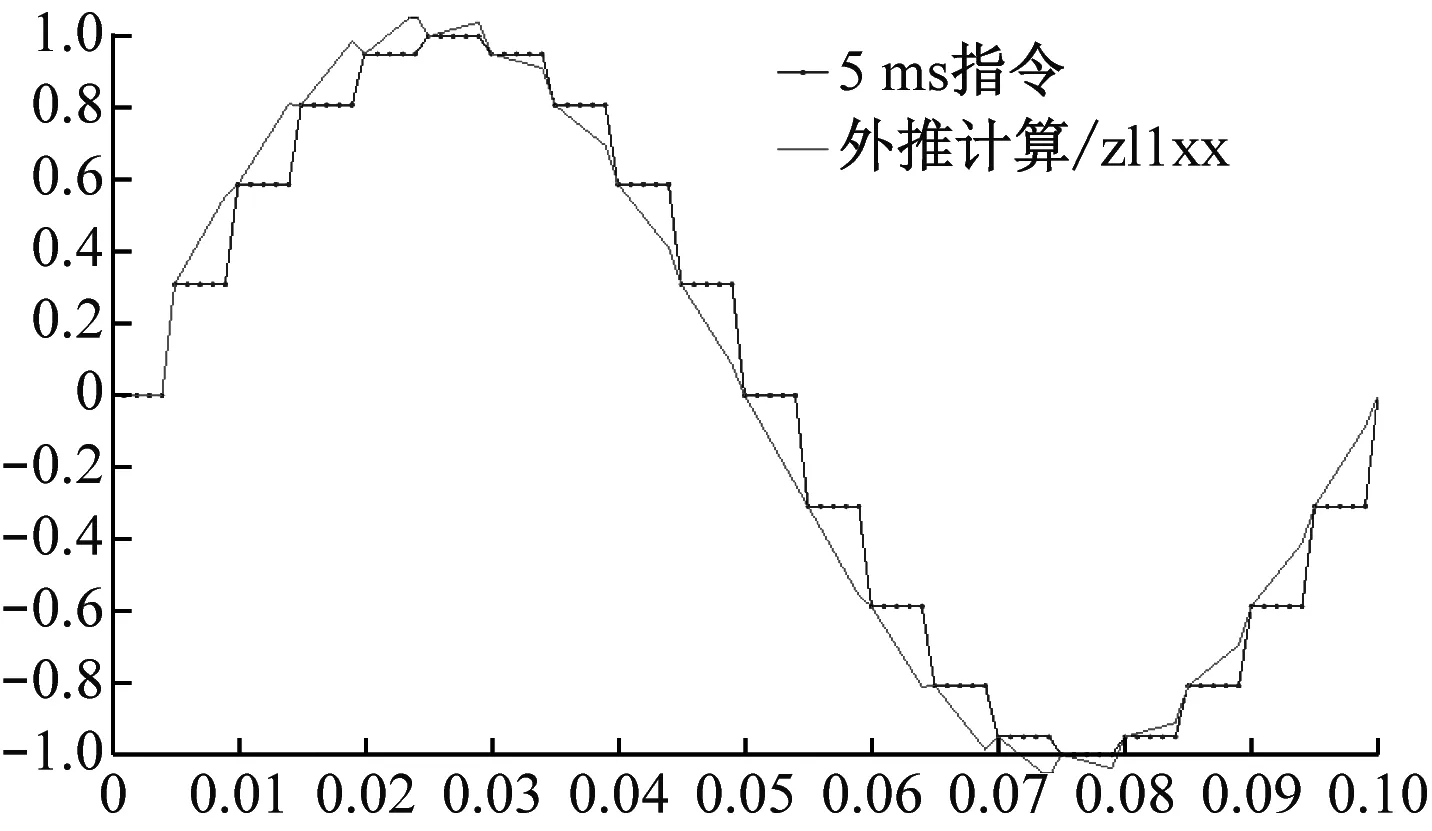
(a) 10 Hz線性插值
(a) 插值前頻率特性
3 測試驗證
針對某舵機系統頻率特性測試時,低頻相位超差問題,在不改變系統物理特性的條件下,僅更改了控制軟件,對5 ms測試指令采取了1 ms拋物線插值處理。經測試,舵機系統相位延遲明顯改善,測試結果如表1所示。
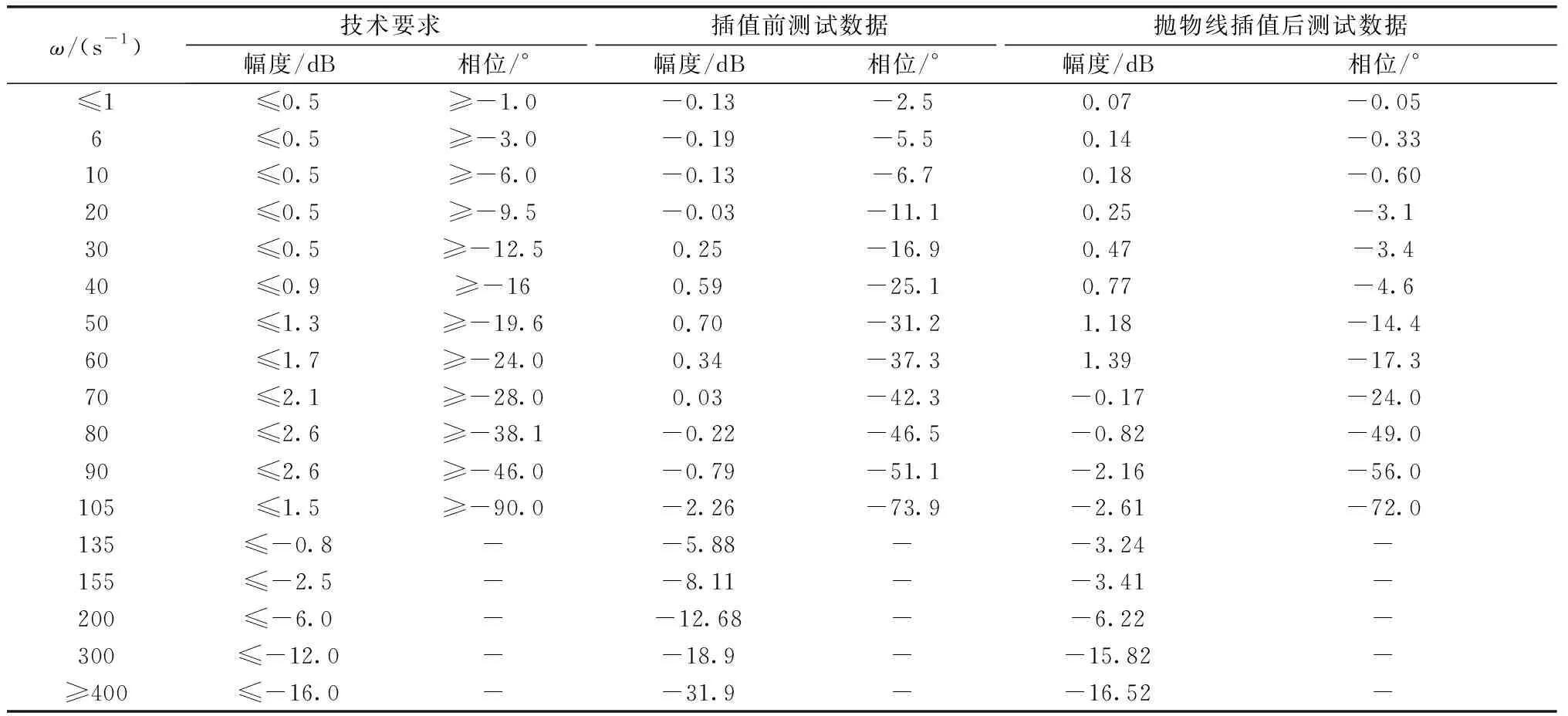
表1 頻率特性測試比對表
控制軟件增加插值后,對軟件進行回歸測試,分別施加正弦、方波及三角波指令對舵機系統的功能及性能進行測試。測試發現:當正弦指令的頻率大于10 Hz時,指令插值對系統相移指標沒有影響。因此,增加了指令插值的限定條件,僅當指令變化不大于0.3°時進行插值,這樣有效降低了高頻正弦指令在波峰和波谷處的失真度。
4 總結
對舵機系統位置指令進行外推插值細分,獲得在時間上更加密集的指令數據,是減小舵機系統低頻相位延遲行之有效的方法。它不需要更改舵機系統的硬件,只需對軟件進行局部更改,就能顯著提高系統的頻率特性。該方法具有計算簡單、易于工程實現的特點,既可以有效消除系統的延遲,又不會因為算法本身的復雜性而產生新的系統延時。
猜你喜歡
語數外學習·高中版上旬(2024年18期)2024-02-20 00:00:00
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2021年10期)2021-11-22 07:26:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·中考版(2017年10期)2017-04-23 06:29:38
