基于模糊自抗擾的開關(guān)磁阻電機轉(zhuǎn)速控制
2021-11-19 08:17:38鄧冉冉
計算機仿真 2021年10期
關(guān)鍵詞:系統(tǒng)
鄧冉冉,欒 茹
(北京建筑大學(xué)電氣與信息工程學(xué)院,北京 100044)
1 引言
開關(guān)磁阻電機(switched reluctance motor,SRM)因其具有結(jié)構(gòu)簡單、堅固、調(diào)速范圍寬,動態(tài)響應(yīng)好等特點,使其成為是目前國際上電動車輛驅(qū)動系統(tǒng)優(yōu)選方案之一[1-2]。然而,由于其自身的雙凸極結(jié)構(gòu)、開關(guān)形式的供電方式、以及鐵心磁路的高度飽和等特點,使SRM中的各個物理量存在較強的非線性。其次,由于電動汽車運行時會出現(xiàn)負(fù)載轉(zhuǎn)速突變,頻繁啟停等狀況,對系統(tǒng)啟動,轉(zhuǎn)速響應(yīng),抗干擾能力上具有較高要求,因此近年來國內(nèi)外學(xué)者對SRM 轉(zhuǎn)速控制提出多種策略。文獻[3]將CMAD與PID結(jié)合對轉(zhuǎn)速實現(xiàn)復(fù)合控制。文獻[4]將常規(guī)滑膜轉(zhuǎn)速調(diào)節(jié)器與模糊控制相結(jié)合的方式,實現(xiàn)轉(zhuǎn)速控制。文獻[5]利用單神經(jīng)元自學(xué)習(xí)性與PID控制器相結(jié)合,同時將模糊控制運用到增益整定上,構(gòu)建轉(zhuǎn)速控制器。上述控制策略都在一定程度上解決了開關(guān)磁阻電機轉(zhuǎn)速控制問題,但存在計算復(fù)雜,運算時間長,時效性差,實際應(yīng)用率低等問題。
自抗擾控制(Auto Disturbance Rejection Control,簡稱ADRC)相較于傳統(tǒng)PI 控制,特點在于其不依賴于精確的數(shù)學(xué)模型器,能對系統(tǒng)所受的內(nèi)、外擾動進行實時估計補償[6-7]。結(jié)合SRM特性及電動汽車運行情況,本文選擇自抗擾控制方法對開關(guān)磁阻電機進行轉(zhuǎn)速控制,同時結(jié)合模糊控制理論,提出一種模糊自抗擾轉(zhuǎn)速控制方法[8-17],在發(fā)揮自抗擾控制器已有優(yōu)點的同時實現(xiàn)部分參數(shù)自學(xué)習(xí),自整定功能,減少參數(shù)調(diào)節(jié),提高系統(tǒng)自適應(yīng)能力。本文在 Matlab/Simulink 仿真軟件中搭建SRM系統(tǒng)仿真模型,通過仿真結(jié)果表明,與常規(guī)PI轉(zhuǎn)速控制器相比,模糊自抗擾轉(zhuǎn)速控制器控制下的轉(zhuǎn)速具有超調(diào)量更小,魯棒性更好,抗干擾能力強,轉(zhuǎn)速誤差小等特點。在開關(guān)磁阻電機轉(zhuǎn)速控制方面表現(xiàn)出良好的控制效果。
2 開關(guān)磁阻電機數(shù)學(xué)方程
SRM的第m相的電壓方程為
(1)
式中Um為m相電壓;Rm為m相電阻;im為m相電流。
根據(jù)力學(xué)基本定律,可得SRM的機械方程為
(2)
式中,J為轉(zhuǎn)動慣量;Tm為m相轉(zhuǎn)矩;TL為電機負(fù)載轉(zhuǎn)矩;D為摩擦阻尼系數(shù)。
SRM的平均電磁轉(zhuǎn)矩表達(dá)式為
(3)
式中,m為SRM的相數(shù);Nr為SRM的轉(zhuǎn)子齒極數(shù);Tx為任一運行點x處的瞬時相轉(zhuǎn)矩;ξ為相電流的中間變量。
3 SRM模糊自抗擾轉(zhuǎn)速控制器設(shè)計
3.1 自抗擾控制器
自抗擾控制器由跟蹤微分器(tracking differentiator,TD)、擴張狀態(tài)觀測器(extended state observer,ESO)、非線性狀態(tài)誤差反饋(nonlinear states error feedback,NLSEF)三個環(huán)節(jié)組成[18],ADRC原理結(jié)構(gòu)如圖1所示。
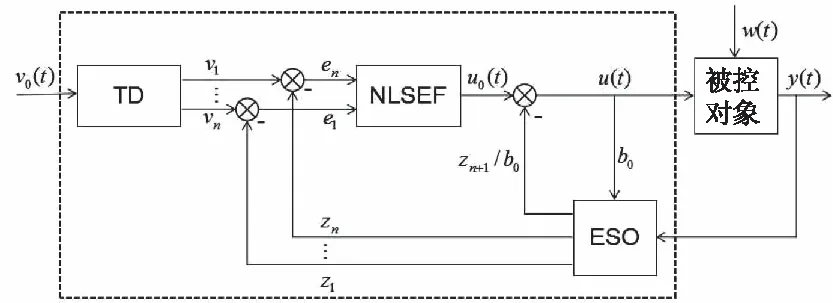
圖1 自抗擾控制原理結(jié)構(gòu)圖
微分跟蹤器(TD)將系統(tǒng)給定信號v0(t)實現(xiàn)過渡過程,以及產(chǎn)生的各階導(dǎo)數(shù)信號。擴張狀態(tài)觀測器(ESO)對被控對象狀態(tài)變化量進行估計給值z1,同時對系統(tǒng)的總擾動進行觀測,給出估計補償,補償值為zn+1/b0。非線性狀態(tài)誤差反饋控制律(NLSEF)對送入誤差進行計算,得出被控對象的控制量u(t)[9]。
3.2 自抗擾轉(zhuǎn)速控制器設(shè)計
對SRM機械方程式(2)進行整理,可以得到
(4)
進一步化簡可得
(5)
則SRM轉(zhuǎn)速閉環(huán)控制系統(tǒng)可以表示為:
(6)
其中
a(t)包含SRM轉(zhuǎn)速閉環(huán)系統(tǒng)的總擾動,包括轉(zhuǎn)速環(huán)的定、轉(zhuǎn)子慣量內(nèi)部擾動與負(fù)載突變或摩擦力矩變化等外部擾動。SRM自抗擾轉(zhuǎn)速環(huán)結(jié)構(gòu)如圖2所示。
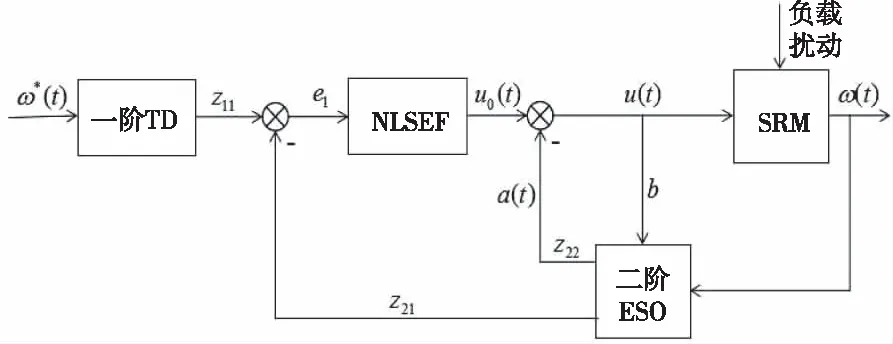
圖2 一階自抗擾轉(zhuǎn)速控制原理結(jié)構(gòu)圖
其中TD方程為
(7)
ESO方程為
(8)
NLSEF方程為
(9)
非線性函數(shù)fal表達(dá)式為

(10)
其中,ω*為給定轉(zhuǎn)速; z11為 ω*的跟蹤信號;z21,z22為 ESO 的狀態(tài)變量,分別為轉(zhuǎn)速反饋和擾動信號的觀測值;u0為 NLSEF 處理過的非線性控制量,z22/b 為開關(guān)磁阻電機內(nèi)擾和外擾的補償值。
3.3 模糊自抗擾(FUZZY-ADRC)轉(zhuǎn)速控制器設(shè)計
非線性狀態(tài)誤差反饋控制律(NLSEF)對開關(guān)磁阻電機的狀態(tài)反饋及內(nèi)外擾動進行實時補償,是自抗擾控制器的核心部分。而合適的增益值β3可以使自抗擾轉(zhuǎn)速控制器擁有強適應(yīng)性及魯棒性。β3值越大,系統(tǒng)響應(yīng)時間短,速度快,但過大會使系統(tǒng)產(chǎn)生大超調(diào)。固定β3值的選定很難滿足SRM系統(tǒng)運行中的多種狀態(tài)。因此,本文利用模糊控制特點,使β3在一定的變化范圍內(nèi)進行修正自整定。同時減少了自抗擾控制器參數(shù)在實際操作中的整定難度。FUZZY-ADRC轉(zhuǎn)速控制器結(jié)構(gòu)如圖3所示。
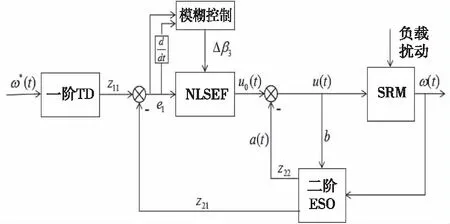
圖3 模糊自抗擾轉(zhuǎn)速控制結(jié)構(gòu)圖
本文利用Matlab中m文件建立模糊控制器,在控制器設(shè)計中,以E,EC為模糊變量輸入,其中E為跟蹤信號z11與擾動信號z21的差值,EC為誤差變化率,Δβ3為輸出量。
其中E,EC的論域范圍為[-1.2,1.2]。Δβ3論域為[-1,1].
隸屬度函數(shù)均采用對稱高斯型屬度函數(shù),其中E,EC均分成7個模糊子集,表示成 {PB(正 大),PM(正 中),Z(零),NS(負(fù) 小),NM(負(fù) 中),NB(負(fù) 大)}。解模糊化采用平均加權(quán)法。根據(jù)專家經(jīng)驗建立的模糊規(guī)則如表1所示。
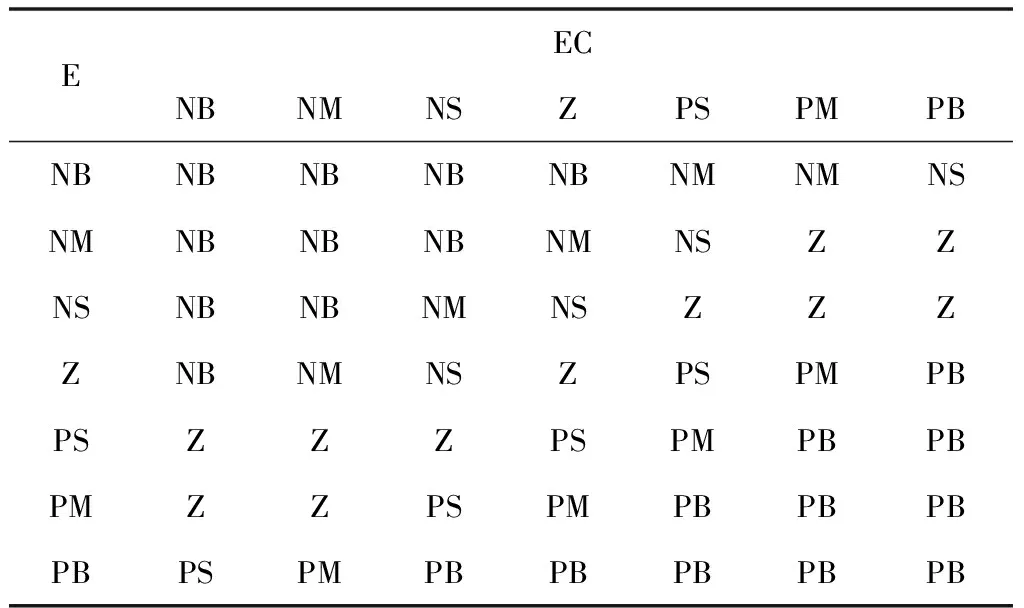
表1 Δβ3模糊控制規(guī)則表
由上述的模糊規(guī)則可以得到一個修正值Δβ3,NLSEF的增益則為β′3=Δβ3+β3,其中基礎(chǔ)值Δβ3=20。
4 FUZZY-ADRC-DITC開關(guān)磁阻電機轉(zhuǎn)速閉環(huán)控制系統(tǒng)
本文開關(guān)磁阻電機控制系統(tǒng)采用轉(zhuǎn)速-轉(zhuǎn)矩雙閉環(huán)控制策略。如圖4所示,外環(huán)為轉(zhuǎn)速環(huán),通過模糊自抗擾轉(zhuǎn)速控制器得到期望轉(zhuǎn)矩,內(nèi)環(huán)轉(zhuǎn)矩環(huán)采用滯環(huán)直接瞬時轉(zhuǎn)矩控制方法實現(xiàn)對轉(zhuǎn)矩的實時控制。該雙閉環(huán)控制,減小SRM 轉(zhuǎn)矩脈動同時對轉(zhuǎn)速實現(xiàn)準(zhǔn)確控制,提高系統(tǒng)抗干擾能力。
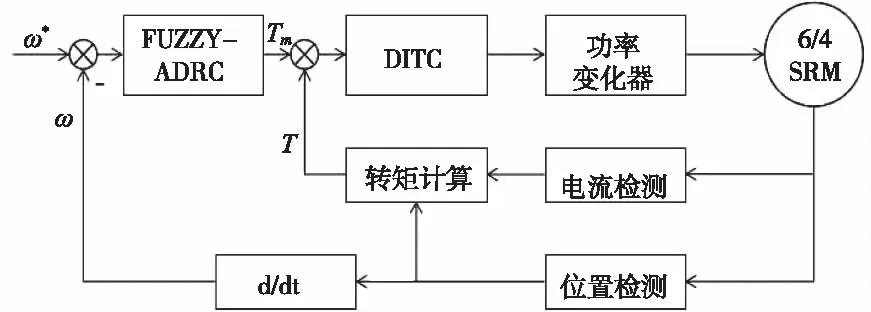
圖4 模糊自抗擾-直接瞬時轉(zhuǎn)矩SRM控制系統(tǒng)
5 仿真結(jié)果分析
本文采用MATLAB/SimuLink仿真軟件對模糊自抗擾SRM轉(zhuǎn)速閉環(huán)控制系統(tǒng)進行仿真,分別對電機起動、給定轉(zhuǎn)速變換、施加負(fù)載突增、突然減負(fù)載等外在擾動,得到這些情況下的轉(zhuǎn)速波形。同時,對同樣的SRM轉(zhuǎn)速閉環(huán)控制系統(tǒng)采用PI轉(zhuǎn)速調(diào)節(jié)器進行仿真比較。
仿真用的電機為三相6/4開關(guān)磁阻電機,額定功率為60kW,B=0.02 N·m·s,J=0.005 kg·m2。根據(jù)PI試湊調(diào)節(jié)規(guī)律,PI轉(zhuǎn)速控制器參數(shù)的設(shè)置:比例增益為Kp=50,積分增益為 Ki=10;模糊自抗擾轉(zhuǎn)速控制器參數(shù)設(shè)置:擴張狀態(tài)觀測器(ESO)中α1=0.95,δ1=0.01,β11=4000,β22=3000,誤差反饋控制律(NLSEF)中α2=0.95,δ2=0.01,b2=1500.
5.1 起動情況轉(zhuǎn)速仿真結(jié)果
圖5圖6分別為1000 r/min,空載起動時轉(zhuǎn)速的變化曲線。由仿真波形圖可以看出,PI與模糊自抗擾轉(zhuǎn)速控制器,約都在3.5×10-2時,電機達(dá)到給定轉(zhuǎn)速。可以看出,模糊自抗擾轉(zhuǎn)速控制器,能實現(xiàn)電機起動快速性的同時保持微小超調(diào)量。
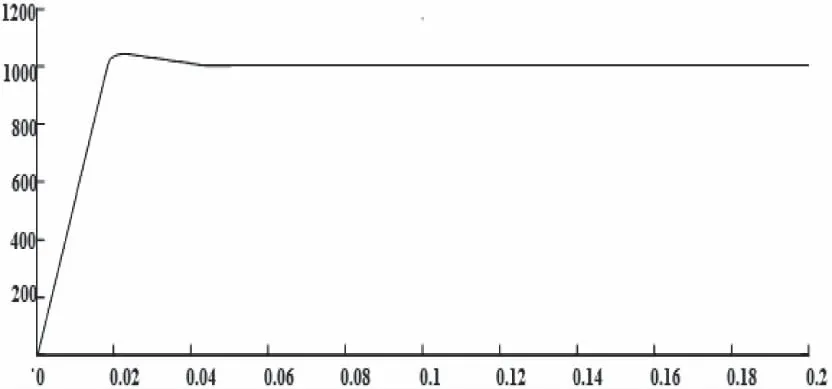
圖5 PI控制下空載起動轉(zhuǎn)速仿真波形圖
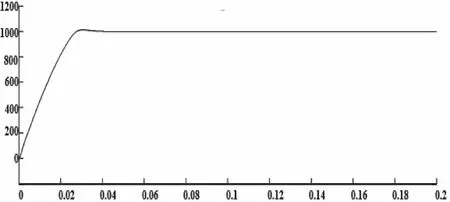
圖6 模糊自抗擾控制下空載起動轉(zhuǎn)速仿真波形圖
圖7圖8分別為1000 r/min,負(fù)載10 N·m起動時轉(zhuǎn)速變化曲線。由仿真波形圖可以看出,PI轉(zhuǎn)速控制器控制時,約0.062s,電機達(dá)到給定轉(zhuǎn)速,超調(diào)量為2.1%,轉(zhuǎn)速波形波動;在模糊自抗擾轉(zhuǎn)速控制器控制時,約0.054s電機轉(zhuǎn)速達(dá)到給定轉(zhuǎn)速,超調(diào)量為0.4%。由此可見,在負(fù)載起動下,模糊自抗擾控制能實現(xiàn)電機快速起動,且基本實現(xiàn)無超調(diào)。
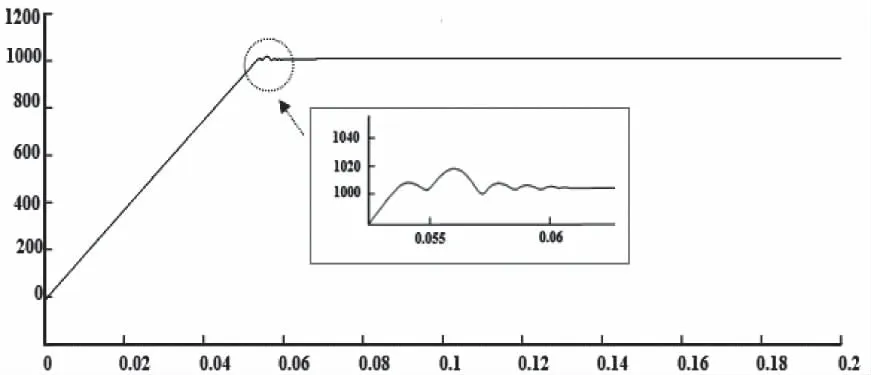
圖7 PI控制下負(fù)載起動轉(zhuǎn)速仿真波形圖
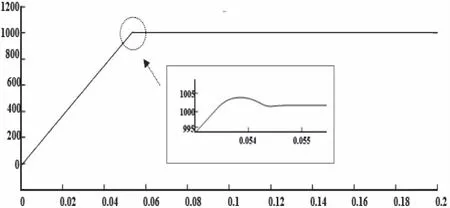
圖8 模糊自抗擾控制下負(fù)載起動轉(zhuǎn)速仿真波形圖
5.2 突加突卸負(fù)載情況下轉(zhuǎn)速仿真結(jié)果
圖9為突加負(fù)載時電機在兩種轉(zhuǎn)速控制器控制下的轉(zhuǎn)速波形圖。其中,給定轉(zhuǎn)速為1000r/min,起始負(fù)載轉(zhuǎn)矩為10 N·m,0.1s時負(fù)載轉(zhuǎn)矩突加至20 N·m。從仿真結(jié)果可以看出,突加負(fù)載時系統(tǒng)在模糊自抗擾轉(zhuǎn)速控制器控制下,轉(zhuǎn)速恢復(fù)至給定轉(zhuǎn)速時間為2×10-3s,轉(zhuǎn)速突變2 r/min;PI轉(zhuǎn)速控制器控制下,轉(zhuǎn)速恢復(fù)至給定轉(zhuǎn)速時間為4×10-3s,轉(zhuǎn)速突變8 r/min.
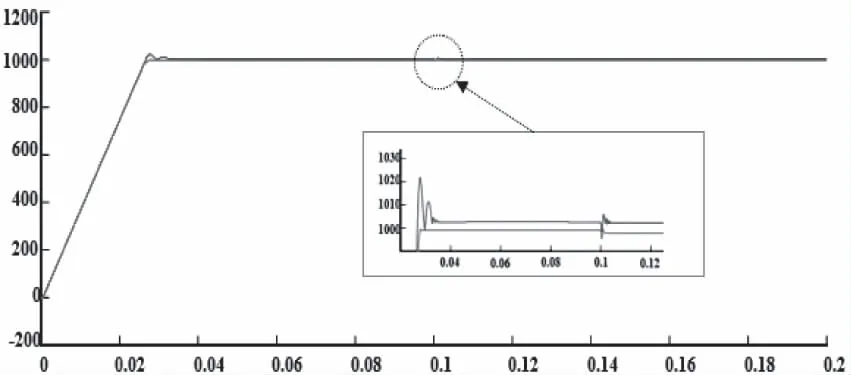
圖9 突加負(fù)載時轉(zhuǎn)速仿真波形圖
圖10顯示在給定轉(zhuǎn)速不變情況下,負(fù)載轉(zhuǎn)矩由起始20 N·m,0.1s時突降至10 N·m時的電機轉(zhuǎn)速仿真結(jié)果。模糊自抗擾轉(zhuǎn)速控制器控制下,突卸負(fù)載時,轉(zhuǎn)速恢復(fù)至給定轉(zhuǎn)速時間同為2×10-3s,轉(zhuǎn)速突變10 r/min;PI轉(zhuǎn)速控制器控制下,轉(zhuǎn)速恢復(fù)至給定轉(zhuǎn)速時間為1×10-2s,轉(zhuǎn)速突變21 r/min.
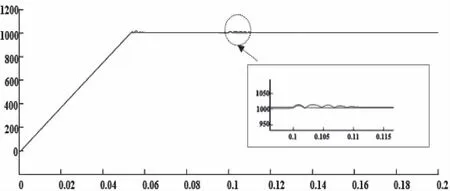
圖10 突卸負(fù)載時轉(zhuǎn)速仿真波形圖
由仿真波形可見,在負(fù)載突變情況下,模糊自抗擾控制的轉(zhuǎn)速控制器相較與PI轉(zhuǎn)速控制器,能使轉(zhuǎn)速更快恢復(fù)至給定轉(zhuǎn)速,轉(zhuǎn)速波動小,具有良好的抗擾性,滿足電動汽車運行時的情況。
5.3 轉(zhuǎn)速跟隨性仿真結(jié)果
圖11及圖12為電機轉(zhuǎn)速跟隨波形圖。以檢驗在給定轉(zhuǎn)速突變時,模糊自抗擾轉(zhuǎn)速控制器控制轉(zhuǎn)速的跟隨性能。圖11,負(fù)載轉(zhuǎn)矩為10 N·m,起始給定轉(zhuǎn)速為1000 r/min,0.1s時給定轉(zhuǎn)速突增至1200r/min。由仿真波形圖看出,PI轉(zhuǎn)速控制器控制下,轉(zhuǎn)速1.14×10-2s穩(wěn)定達(dá)到給定轉(zhuǎn)速,模糊自抗擾控制下6×10-3s轉(zhuǎn)速達(dá)到給定值。圖12顯示在負(fù)載轉(zhuǎn)矩為10 N·m時,轉(zhuǎn)速在0.1s從1000 r/min突降至800r/min的仿真情況。從仿真波形圖中可以看出,PI轉(zhuǎn)速控制器控制的轉(zhuǎn)速在1×10-2s達(dá)到給定,模糊自抗擾轉(zhuǎn)速控制器在5×10-3s內(nèi)實現(xiàn)穩(wěn)定,達(dá)到給定轉(zhuǎn)速。
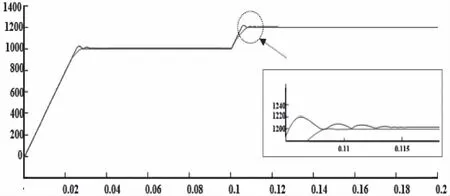
圖11 給定轉(zhuǎn)速突增仿真波形圖
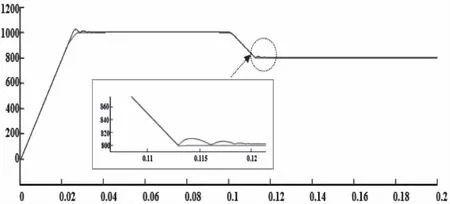
圖12 給定轉(zhuǎn)速突降仿真波形圖
模糊自抗擾控制轉(zhuǎn)速實現(xiàn)跟隨給定快速且能基本實現(xiàn)無超調(diào),轉(zhuǎn)速波動及轉(zhuǎn)速差值小,對系統(tǒng)的整體擾動小。
6 結(jié)語
本文采用模糊控制與自抗擾控制相結(jié)合的方法構(gòu)建的模糊自抗擾轉(zhuǎn)速調(diào)節(jié)器。①實現(xiàn)了自抗擾控制器中NLSEF增益β3的自整定功能;②采用這種模糊自抗擾轉(zhuǎn)速控制器,使SRM調(diào)速系統(tǒng)轉(zhuǎn)速波動小,響應(yīng)速度快、抗干擾能力強、超調(diào)量小。提高開關(guān)磁阻電機雙閉環(huán)控制系統(tǒng)的穩(wěn)定性。經(jīng)過仿真的比較,其綜合控制性能優(yōu)于傳統(tǒng) PI 轉(zhuǎn)速控制器。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
