雙凸極永磁電動機的建模及其系統仿真
2021-11-19 11:16:56楊天宇張廣明
計算機仿真 2021年10期
關鍵詞:信號
楊天宇,張廣明
(南京工業大學電氣工程與控制科學學院,江蘇 南京 211816)
1 引言
20世紀90年代,美國Wisconsin大學的Thomas A.Lipo教授提出了雙凸極永磁電動機(Doubly Salient Permanent Magnet Motor,DSPM)[1]。DSPM結構簡單、成本較低、魯棒性強、功率密度和工作效率較高,在電動汽車、風力發電、航空航天等領域的應用日益廣泛。
DSPM的建模需要在推導電機數學模型的基礎上,確定電樞繞組的靜態特性(自感與磁鏈)。靜態特性的計算有三種方法:解析法、等效磁路法和有限元法。
解析法通過計算分段線性或非線性數學解析式,表示靜態特性隨轉子位置和電樞電流變化的情況[2],缺點是無法同時具備模型精度高和數據處理簡便兩種優勢。等效磁路法通過求解等效磁路方程,考慮電樞反應對靜態特性的影響[3],缺點是等效磁路的構建較為繁瑣。有限元法利用計算機有限元分析技術,根據電機結構和磁路特征計算靜態特性[4],精度高且計算簡便,也沒有解析法和等效磁路法的固有缺陷。
關于DSPM建模的研究,目前大多局限在靜態特性的分析上。在仿真模型和系統構建方面的研究則較少,它們正是運用三相六狀態控制[5]和三相九狀態控制[6]等復雜控制策略的前提。
對此,本文建立了DSPM的仿真模型,構造了它的雙閉環系統。使用標準角度控制策略[7]進行了系統仿真,仿真結果驗證了電機建模和系統構造方法的有效性。
2 雙凸極永磁電動機建模
2.1 數學模型推導
在結構上,定轉子均為凸極結構的DSPM屬于變磁阻類型電機,工作時遵循磁阻最小原理,即磁鏈沿磁阻最小的磁路閉合[8]。特別處在于,DSPM在定子上安裝有用于勵磁的永磁體,在數學模型上與普通磁阻類型電機有顯著區別。
根據DSPM的磁路特征、電路特征、能量轉換原理和動力學原理,推導涵蓋磁鏈方程、電壓方程、轉矩方程和運動方程的數學模型。
2.1.1 磁鏈方程
由磁路特征,得到各相繞組磁鏈方程
(1)
式中:ψa,ψb,ψc為各相繞組的磁鏈;ψra,ψrb,ψrc為各相繞組的電樞磁鏈分量;ψma,ψmb,ψmc為各相繞組的永磁磁鏈分量;La,Lb,Lc為各相繞組的自感;Lab=Lba,Lac=Lca,Lbc=Lcb為各相繞組之間的互感;ia,ib,ic為各相繞組的電樞電流。
2.1.2 電壓方程
由電路特征,得到各相繞組電壓方程
(2)
式中:ua,ub,uc為各相繞組的端電壓;Ra,Rb,Rc為各相繞組的電阻。
將磁鏈方程代入電壓方程,同時因繞組間互感對計算的影響很小而將其忽略,得到各相繞組近似電壓方程
(3)
式中:θ為轉子位置角;ω為轉子角速度。
2.1.3 轉矩方程
根據機電能量轉換原理,同時忽略繞組間互感引起的較小磁阻轉矩分量,得到轉矩方程
Te=Tea+Teb+Tec
=Tra+Tma+Trb+Tmb+Trc+Tmc
(4)
式中:Te為電磁轉矩;Tea,Teb,Tec為各相輸出的有效電磁轉矩;Tra,Trb,Trc為各相自感磁阻轉矩;Tma,Tmb,Tmc為各相永磁轉矩。
2.1.4 運動方程
根據剛體定軸轉動的動力學原理,得到運動方程
(5)
式中:Tl為負載轉矩;J為電機轉子的轉動慣量;D為系統的阻尼系數。
2.2 靜態特性計算
三相DSPM定、轉子級數一般配置為6/4極和12/8極這兩種結構。其中,12/8極DSPM擁有更高的功率密度,且軛部磁路長度和繞組端部長度較短,磁路中的鐵損低、電樞中的銅耗低[9]。
DSPM中的永磁體按嵌入方式分為切向磁鋼和徑向磁鋼。內置徑向磁鋼相比普通切向磁鋼的優點是電機外部基本沒有漏磁場。
綜合上述分析,選擇了12/8極內置徑向磁鋼的DSPM作為建模對象,其結構參數如表1所示,截面圖如圖1所示。
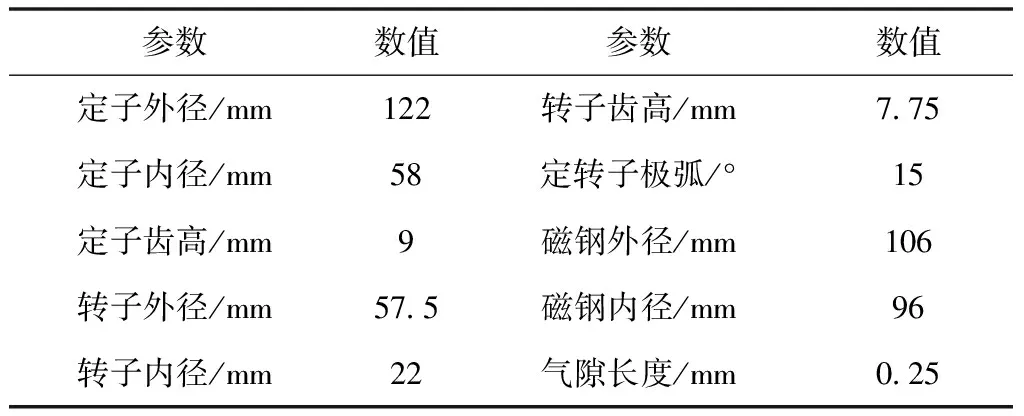
表1 DSPM結構參數
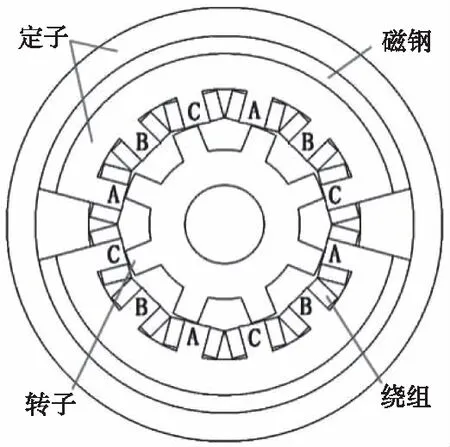
圖1 DSPM截面圖
運行方面,該DSPM的額定功率為550W,額定轉矩為3.5Nm,額定轉速為1500r/min,額定相電壓為60V。
DSPM的靜態特性包括各相電樞繞組的自感(忽略互感)和磁鏈,它們是轉子位置角和電樞電流的函數。研究表明,自感和磁鏈主要由永磁體提供,電樞反應對其影響很小[10],故可近似表示為轉子位置角的一元函數。
在Ansys Maxwell軟件中,對DSPM進行2D瞬態場有限元分析。仿真得到了空載(無電樞電流)時各相電樞繞組的自感和磁鏈與轉子位置角(電角度)的對應關系,繼而繪制相應的關系曲線。曲線中轉子位置角的范圍為360°電角度(45°機械角度),且0°時的轉子位置為圖1中的轉子位置。DSPM各相電樞繞組自感和磁鏈曲線如圖2和圖3所示。

圖2 DSPM各相電樞繞組自感曲線
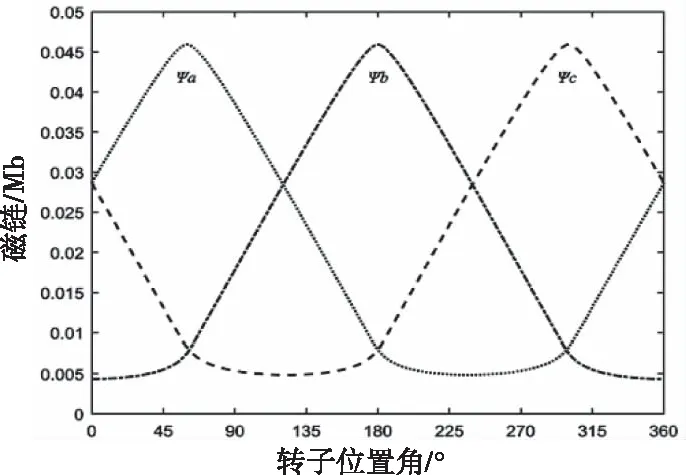
圖3 DSPM各相電樞繞組磁鏈曲線
根據曲線,DSPM各相電樞繞組的自感和磁鏈與轉子位置角呈現出明顯的非線性特征。
各相電樞繞組自感曲線呈馬鞍狀,當轉子極與定子極完全重合時,鐵心趨于飽和,磁阻增大,此時的自感值略小于半重合時的情況。
各相電樞繞組磁鏈曲線呈單峰狀,隨著轉子極與定子極重合程度的加深,磁鏈值逐漸增大。
2.3 仿真模型建立
利用DSPM數學模型方程和靜態特性數據,在Matlab/Simulink仿真環境中建立它的仿真模型。為計算各相電樞電流和電磁轉矩,根據電機數學模型,導入有限元分析所得的自感和磁鏈數據,并使用數值微分方法計算它們關于轉子位置角的偏導數。偏導數取值為自感和磁鏈數據關于轉子位置角的差商。
使用模塊庫中的Lookup Table模塊實現對自感、磁鏈和上述偏導數的插值。插值后自感和磁鏈曲線亦如圖2和圖3所示,自感和磁鏈對于轉子位置角的偏導數曲線則如圖4和圖5所示。
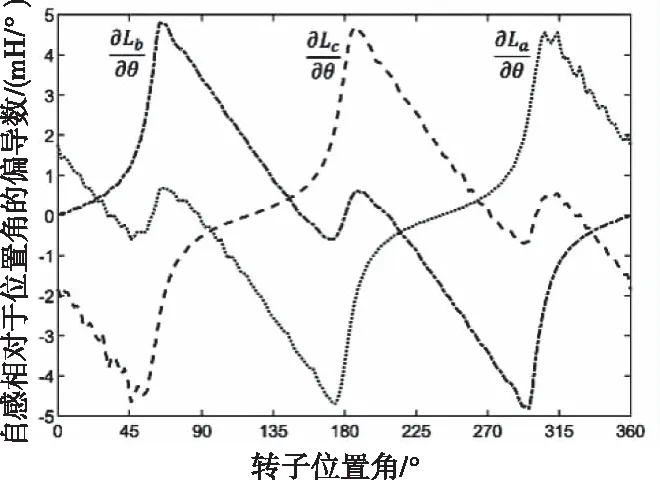
圖4 DSPM各相電樞繞組曲線
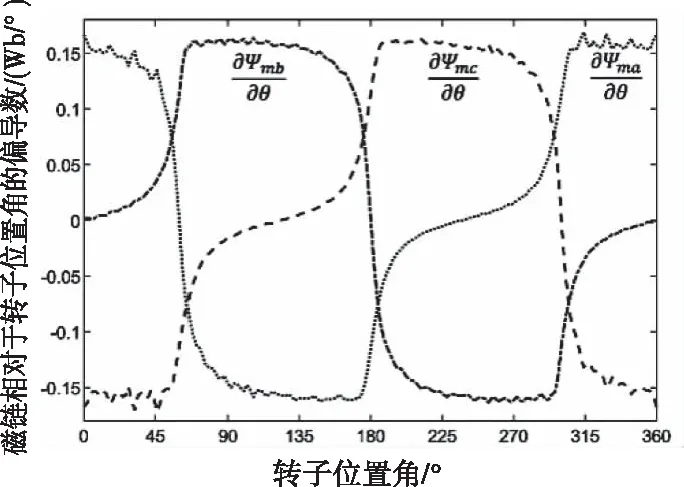
圖5 DSPM各相電樞繞組曲線
各相電樞繞組模塊根據電機數學模型和靜態特性數據搭建而成。其中有插值模塊以及表示正極和中性點的兩個物理建模連接(PMC)端口。同時,轉子位置信號為輸入信號,端電壓、相電流和相轉矩信號為輸出信號。
模塊內部計算過程如下:首先電壓測量模塊測量出端電壓;然后插值模塊根據處理后的轉子位置角,計算自感、磁鏈以及它們關于轉子位置角的偏導數;接著將端電壓代入電壓方程,計算相電流;再將相電流代入轉矩方程,計算相轉矩;最后通過信號輸出接口輸出端電壓、相電流和相轉矩。
A相電樞繞組模塊如圖6所示,其它相的電樞繞組模塊與A相類似。其中,電樞繞組的電阻R取值為0.28Ω。
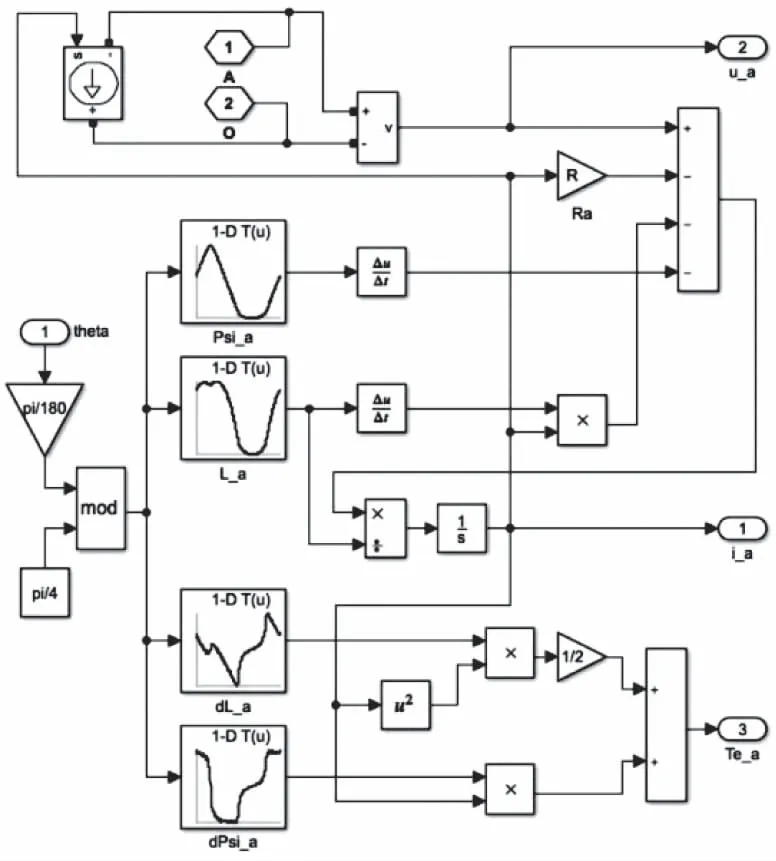
圖6 DSPM的A相電樞繞組模塊
DSPM的運動方程仿真模型如圖7所示。其中有一個表示電磁轉矩的信號輸入端口,以及兩個表示轉子轉速和位置角的輸出端口。根據實際情況,轉子的轉動慣量J取值為0.002kg·m2,系統的阻尼系數D取值為0.001N·m·s。

圖7 DSPM的運動方程模塊
上述各相繞組和運動方程模塊共同構成了DSPM的仿真模型。該模型如圖9中的DSPM模塊所示,其輸入為三相電樞繞組及其中性點的物理建模連接端口,輸出為三相電樞繞組的相電壓、相電流,轉子的位置角、轉速,以及電機的電磁轉矩。
3 雙凸極永磁電動機系統仿真
3.1 系統模塊化構造
DSPM系統框圖如圖8所示。該系統的控制方式為雙閉環控制。其中外環為轉速環,使用PI控制,內環為電流環,使用滯環控制。
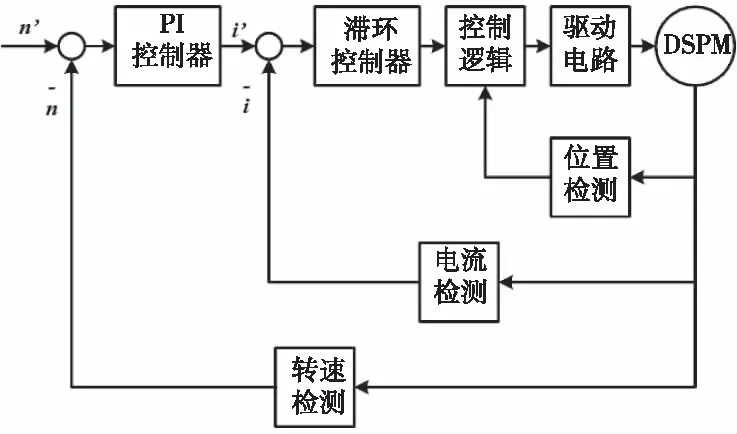
圖8 DSPM系統框圖
同時,DSPM是方波驅動型電機,采用標準角度控制策略,即在電樞繞組磁鏈的上升區間和下降區間內分別通入正負電流,在磁鏈接近為零的區間內不通電[7]。系統根據此策略,將檢測的轉子位置轉換為驅動電路中開關管的控制邏輯。
在Matlab/Simulink仿真環境中建立DSPM系統。按照模塊化的構造思想,將系統劃分為控制、驅動和DSPM三個主要模塊,各模塊便于集成和擴展。系統仿真結構圖如圖9所示。

圖9 DSPM系統仿真結構圖
3.1.1 DSPM模塊
DSPM模塊如圖10所示,它建立了DSPM精確仿真模型,其中包括各相繞組和運動方程子模塊。同時將各相電流、轉子轉速和位置角信號反饋至控制模塊。
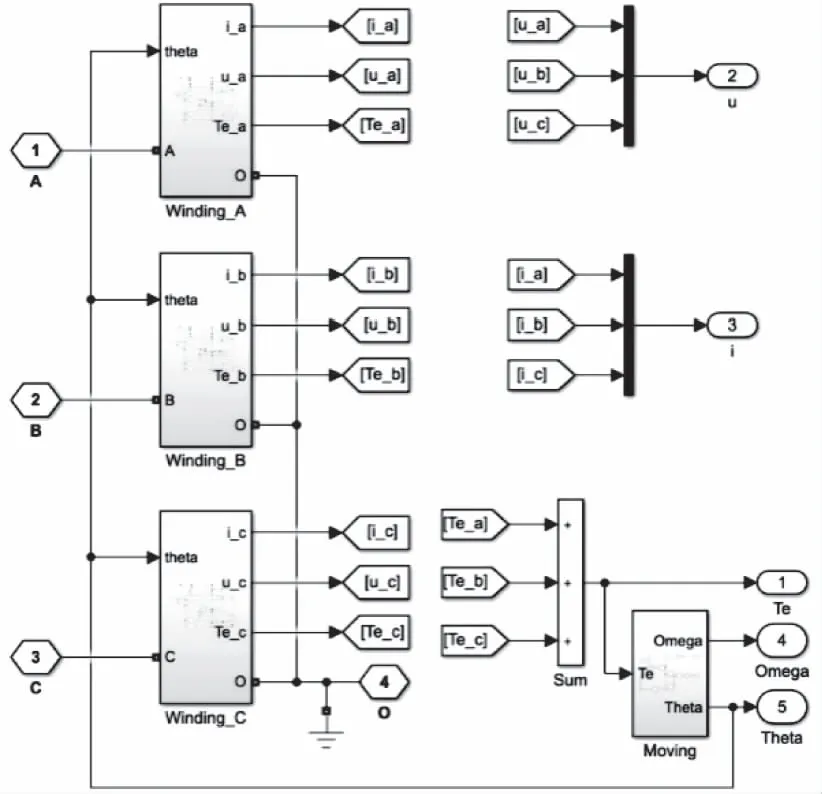
圖10 DSPM模塊結構圖
3.1.2 驅動模塊
驅動模塊如圖11所示,它構造了三相橋式逆變電路,其直流側電壓為120V,使用分裂電容均壓,門極驅動信號由輸入端發送至各功率晶體管,驅動電壓由輸出端提供至DSPM模塊。
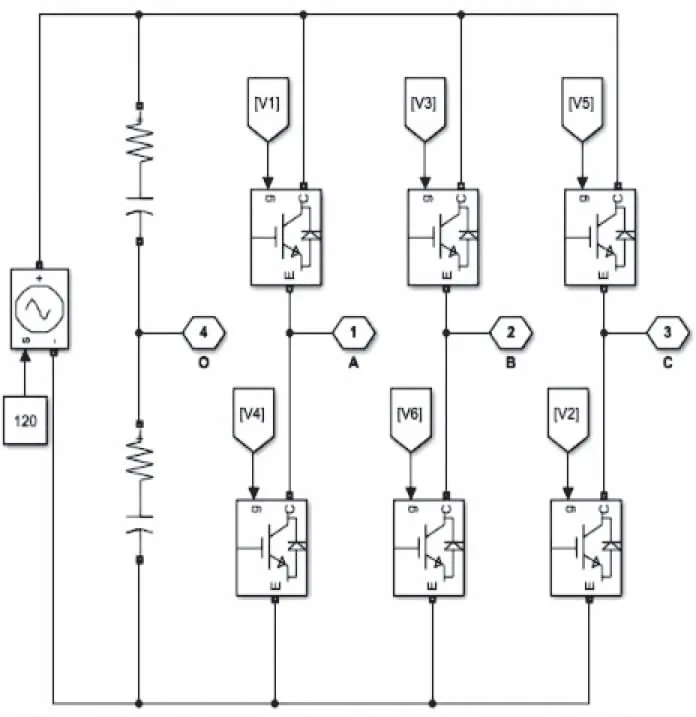
圖11 驅動模塊結構圖
3.1.3 控制模塊
控制模塊接收DSPM的反饋信號,生成驅動信號傳遞至驅動模塊,模塊內部分為三個部分。
雙閉環控制部分如圖12所示,該部分接收轉速和電流信號,經PI和滯環控制器,輸出各相PWM信號以及與參考電流同號的方向信號。方向信號為正1表示電動,為負1表示制動。PI控制器中Kp=0.064,Ki=0.8。為防止出現過流現象,參考電流限幅在±60A區間。
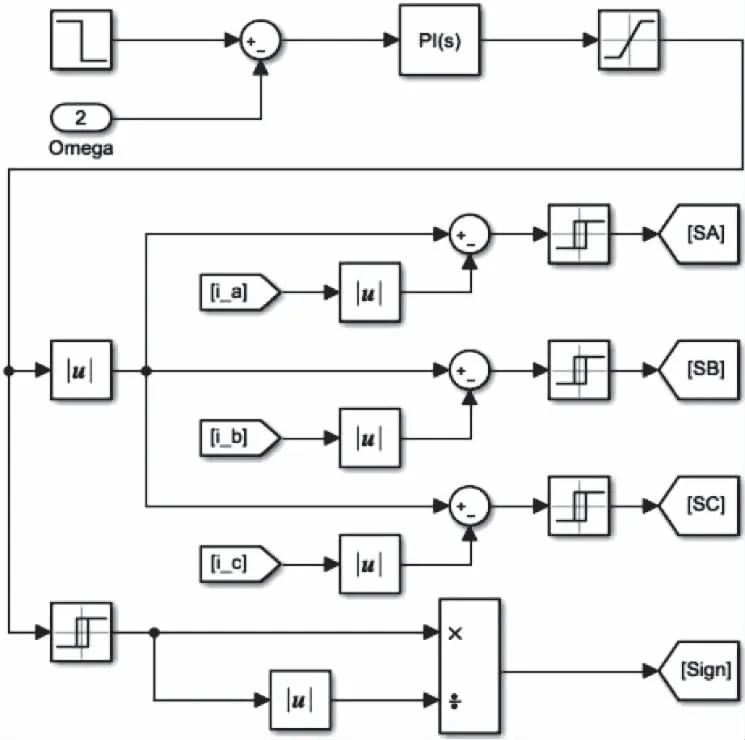
圖12 雙閉環控制部分模塊圖
標準角度控制部分如圖13所示,該部分接收轉子位置信號,根據標準角度控制策略,輸出驅動電路中開關管的導通信號。
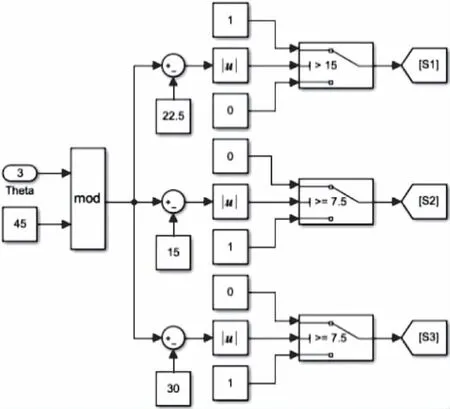
圖13 標準角度控制部分模塊圖
驅動信號輸出部分如圖14所示,該部分將轉向信號、各相PWM信號和開關管導通信號轉化為開關管驅動信號。
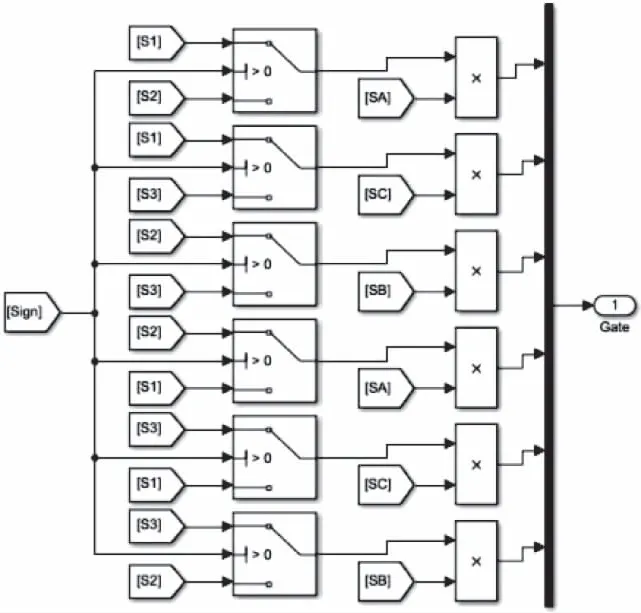
圖14 驅動信號輸出部分模塊圖
各轉子位置下,DSPM電動和制動運行時開關管的標準角度控制策略如表2所示。
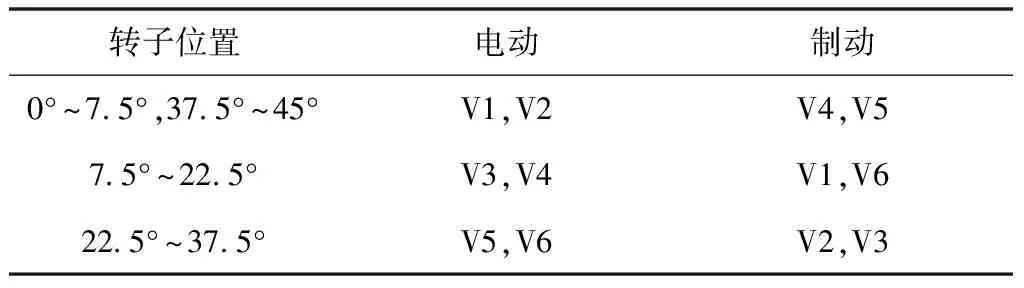
表2 標準角度控制策略
3.2 系統仿真分析
對DSPM系統進行仿真,將其運行劃分為三個運行階段。各階段的時間、參考轉速和負載轉矩如表3所示。
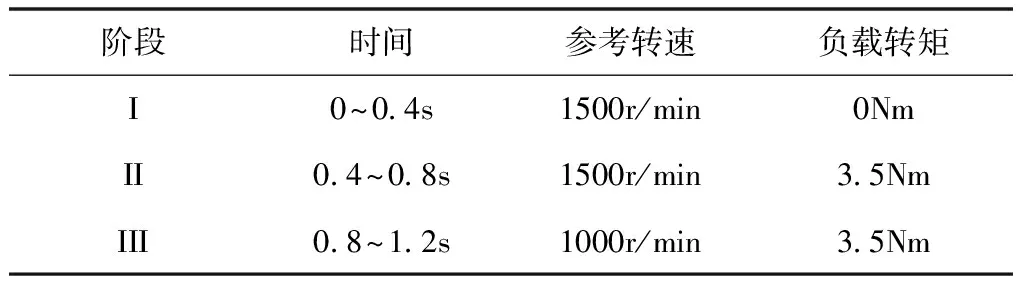
表3 DSPM各階段運行狀態
經過仿真,DSPM的實際轉速、A相電流、電磁轉矩波形如圖15所示。
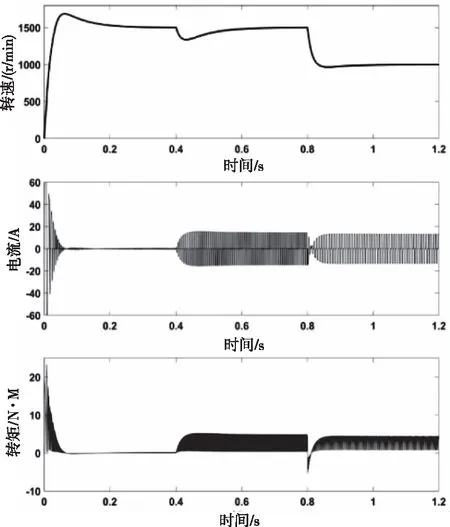
圖15 實際轉速、A相電流、電磁轉矩波形圖
三個階段中,電機實際轉速均較快地達到了準確的參考轉速。階段I中,電機空載起動,起動電流被限幅至±60A,隨后電流和轉矩衰減至穩定。階段II和階段III中,電機負載運行,且前者的電流和轉矩比后者大。綜合上述波形和分析,驗證了DSPM仿真系統整體的有效性。
額定狀態下DSPM三相電流波形如圖16所示。三相電流呈方波狀,任意時刻,兩相通正負電,另一相不通電,符合標準角度控制策略。同時由于各相自感大小的差異,使得換相時電流下降時間比上升時間長。
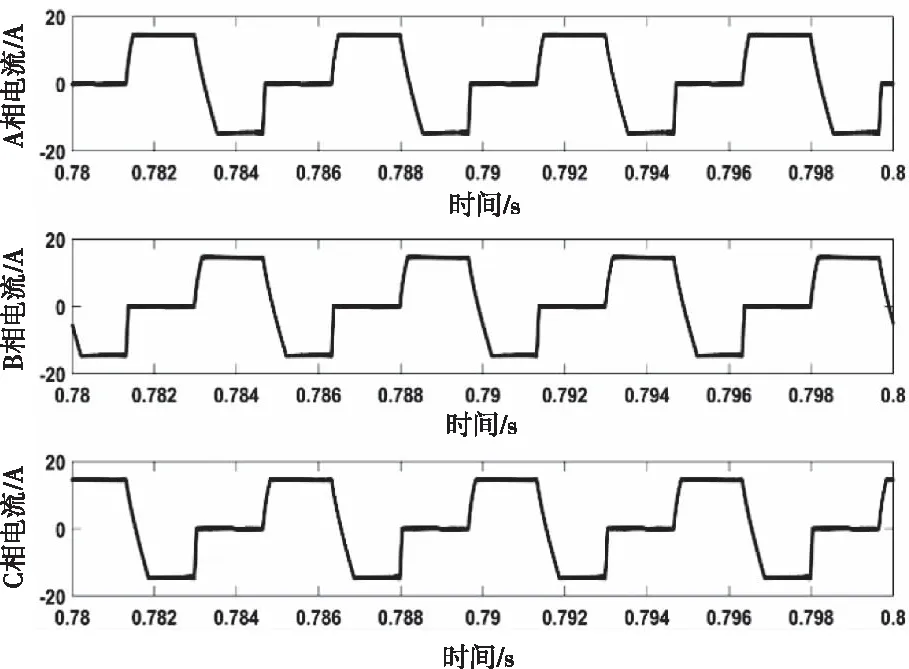
圖16 額定狀態下三相電流波形圖
額定狀態下DSPM三相轉矩與合成轉矩波形如圖17所示。各相轉矩和電流存在互相對應的關系,轉矩在對應繞組通電時產生,不通電時消失,換向時減小。合成轉矩由各相轉矩疊加而成。各相轉矩在換相時減小,形成合成轉矩典型的脈動狀波形。

圖17 額定狀態下三相轉矩與合成轉矩波形圖
綜合上述波形和分析,驗證了DSPM仿真模型建立的準確性。
4 結論
1)所分析12/8極內置徑向磁鋼的DSPM具有高功率密度、低鐵損、低銅耗的優點;
2)使用有限元法計算電機靜態特性,代入推導的數學模型方程,建立了DSPM仿真模型,此方法精度高且通用性強;
3)構造了DSPM完整的雙閉環系統,并仿真驗證了系統的有效性。該系統模塊化程度高且實用性強,便于集成和擴展,為研究復雜控制策略和提升控制性能提供基礎。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
