基于神經網絡的復飛風險決策技術研究
2021-11-19 08:17:28蘇曉東朱齊丹
計算機仿真 2021年10期
李 暉,王 雅,蘇曉東,朱齊丹
(1.哈爾濱商業大學計算機與信息工程學院,黑龍江省 哈爾濱 150028;2.哈爾濱工程大學自動化學院,黑龍江省 哈爾濱 150001)
1 引言
由于復飛問題的重要性,決策形勢的嚴峻性,從艦機適配安全性角度考慮,復飛決策技術相比于引導著艦技術重要性毫不遜色,深入分析艦載機復飛機動過程,精確建立復飛運動模型以及合理制定復飛決策是有著理論與實際意義的[1-3]。
目前可見的復飛決策研究多是在明確艦載機初始飛行狀態的基礎上,依據復飛航跡曲線簇建立復飛風險區域,作為劃分有無撞艦風險的定性判別依據,不能定量地,實時地針對任意初始復飛狀態進行決策,對著艦指揮官(Landing Signal Officer,LSO)判斷艦載機當前復飛風險和未來風險變化趨勢的事實刻畫較為粗糙。
為彌補定性復飛決策技術的局限性,本文在分析復飛機動過程,建立高度損失較小的軍用推力與升降舵綜合控制復飛運動模型的基礎上,針對傳統復飛決策方法定量性的不足,提出基于神經網絡的復飛風險決策方法,實時計算當前飛行狀態下的艦載機復飛風險,比較不同輸入變量的對復飛剩余距離的影響,通過實例分析證明方法的準確性。
2 復飛運動模型
傳統的艦載機軍用推力復飛運動模型建立的基礎是美國海軍航空發展中心Robert B.Johnstone教授于1968年提出的經典安全復飛準則,從艦尾凈高、駕駛員指令反應延遲和復飛操縱手段三個角度對復飛安全提出要求[4,,5],模型結構如圖1所示。
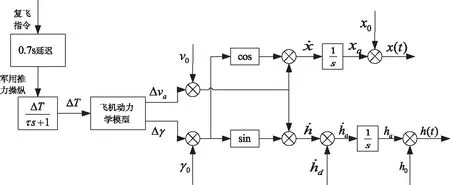
圖1 軍用推力復飛系統

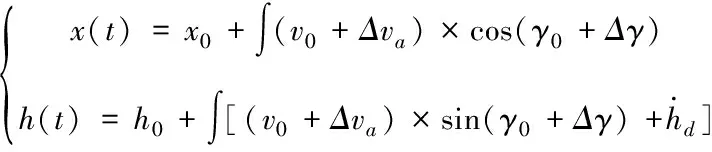
(1)
軍用推力復飛技術應用廣泛,但由于單一油門操縱的推力限制,復飛過程中速度增大的同時迎角減小,較大的高度損失不僅增加了復飛風險,同時也給駕駛員造成心理壓力,這對于保證艦載機著艦安全是非常不利的。
現代高機動性能飛機在控制能力提升的條件下,以降低復飛高度損失為出發點,在原軍用推力操控的基礎上,增加升降舵控制,組成軍用推力與升降舵綜合控制系統:結合駕駛員油門操控和縱向駕駛桿控制,推力增加的同時維持合適迎角,以此來減少高度損失[7-12]。
近年來廣泛應用的是利用模糊控制保持迎角恒定的升降舵操縱方式[13],建立的軍用推力與升降舵綜合控制復飛系統結構如圖2所示。
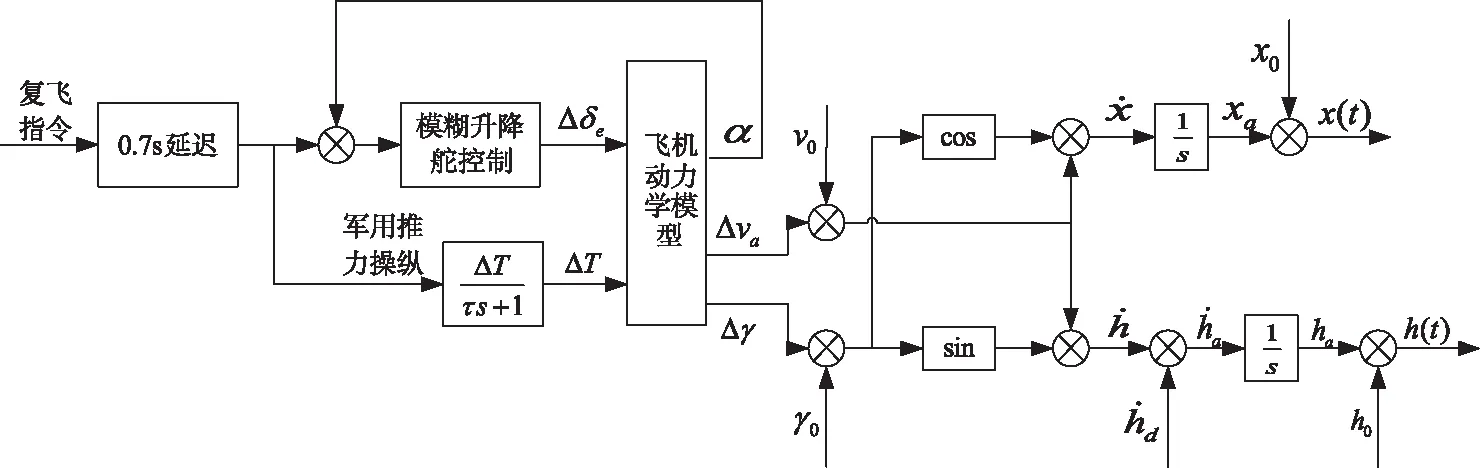
圖2 軍用推力與升降舵綜合控制復飛系統
如圖3所示為兩種復飛操作方式得到的包線對比圖。綜合操控復飛模型風險區域顯著減小,較單一軍用推力操控區域縮小約3倍,多通道協同作用的操控方法可以在允許的條件下減少不必要的復飛,不僅提高了風險評估的準確性,而且降低了駕駛員飛行壓力,這種雙通道綜合控制模型符合實際復飛操作情況,可以作為后續復飛決策技術的研究對象。
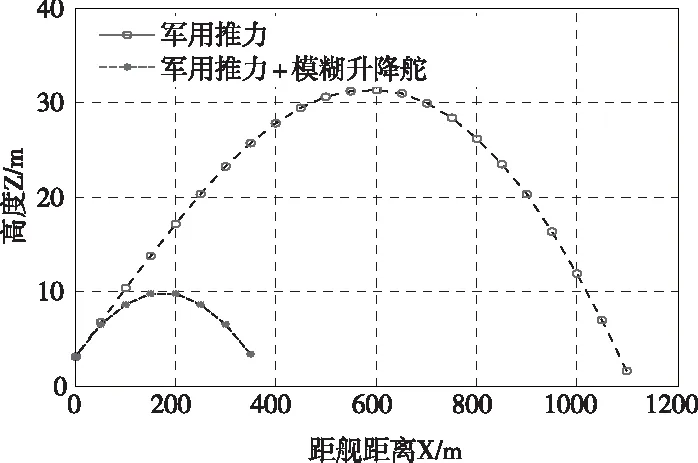
圖3 不同操縱方式復飛包線
3 復飛狀態風險分析
艦載機復飛過程中,駕駛員面臨的最主要風險——“復飛撞艦風險”,是指在復飛過程的近艦階段艦載機尾鉤或其它部位撞擊航母甲板尾端的危險情況。由于進艦速度較快,駕駛員來不及做出反應,僅在艦尾附近對復飛風險進行評估是不實用的,如果能夠在進艦全過程中實時評估復飛風險,那么就可以依據風險量值決策復飛,但由于艦載機飛行狀況的復雜性和未來狀態的不確定性,風險評價難度很大,如圖4所示為艦載機撞艦過程示意圖[14-16]。
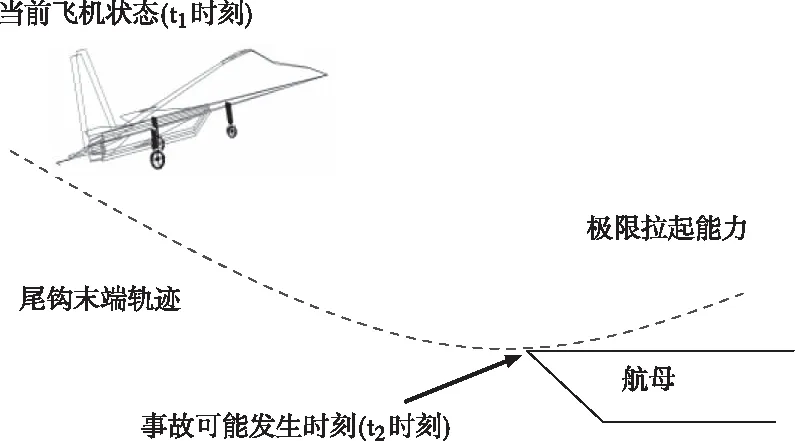
圖4 軍用推力與升降舵綜合控制復飛系統
圖4中,t1時刻艦載機距離航母較遠,但此時采取復飛機動就已經處于“尾鉤撞艦”的高風險狀態,因為即使沿圖中的標準復飛航跡拉起,仍會在復飛過程的t2時刻發生撞艦事故,但僅根據t1時刻飛行狀態預測復飛風險是比較困難的,因為t2時刻事故發生的原因,可能是t1時刻位置過低,飛行迎角過小,俯仰角波動速度較大或當前風速和流場引起機體下沉等,只有將所有影響因素一一列舉,并依據它們建立高維空間概率分布函數,才可能準確量化t1時刻風險。因此,本文欲建立的復飛風險評價函數應為作用于整個下滑過程中,關于艦載機各飛行狀態量和環境量的高維空間連續函數。所謂t1時刻“撞艦風險”,即為t2時刻實際撞艦事故發生的概率
(2)

步驟1:選取tk時刻艦載機飛行狀態(位置、姿態)和環境信息作為初始狀態量,依據軍用推力與升降舵綜合控制復飛模型繪制tk時刻作為復飛起始點的標準復飛航跡;


(3)
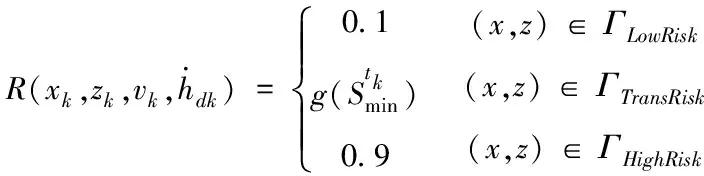
其中ΓLowRisk、ΓHighRisk和ΓTransRisk分別為“復飛低風險區”、“復飛高風險區”和“復飛過渡風險區”。
4 基于神經網絡的復飛風險評測
4.1 網絡結構設計
(4)
理論研究表明具有單隱層結構的BP系統可以滿足任意多維映射的需要,且對于n個輸入單元和q個輸出單元的3層網絡,隱層節點數目可以如式(5)確定[14]。
(5)
式中a為0-10常數,結合實際情況進行試探性選擇,從計算精度和效率著手,最終確定N=7。
4.2 模型訓練與測試
本文建立拓撲結構為4-7-1型的BP神經網絡模型,如圖5所示,其中隱層和輸出層分別選用雙曲正切S型激活函數和對數S型激活函數,通過離線仿真得到飛行狀態數據,歸一化后分為訓練數據和測試數據兩類,模型經600次訓練收斂,誤差為0.00014,精度較高。
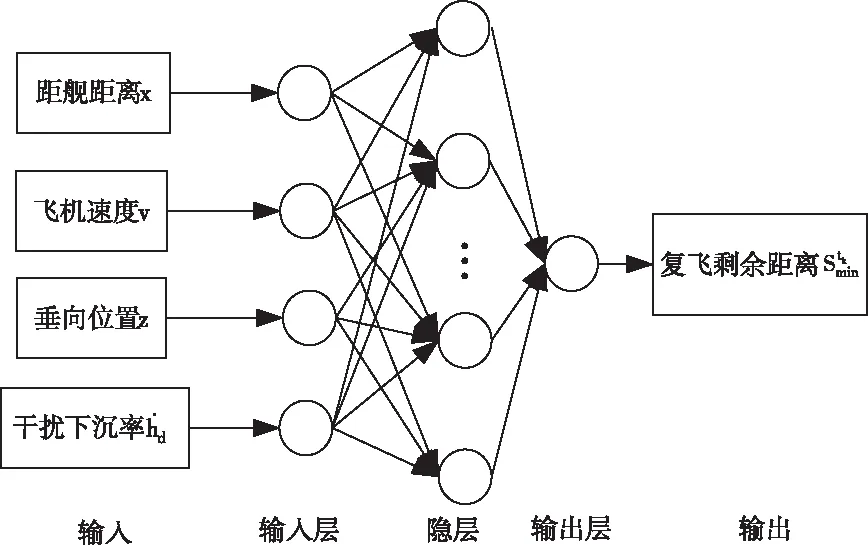
圖5 復飛風險評測模型
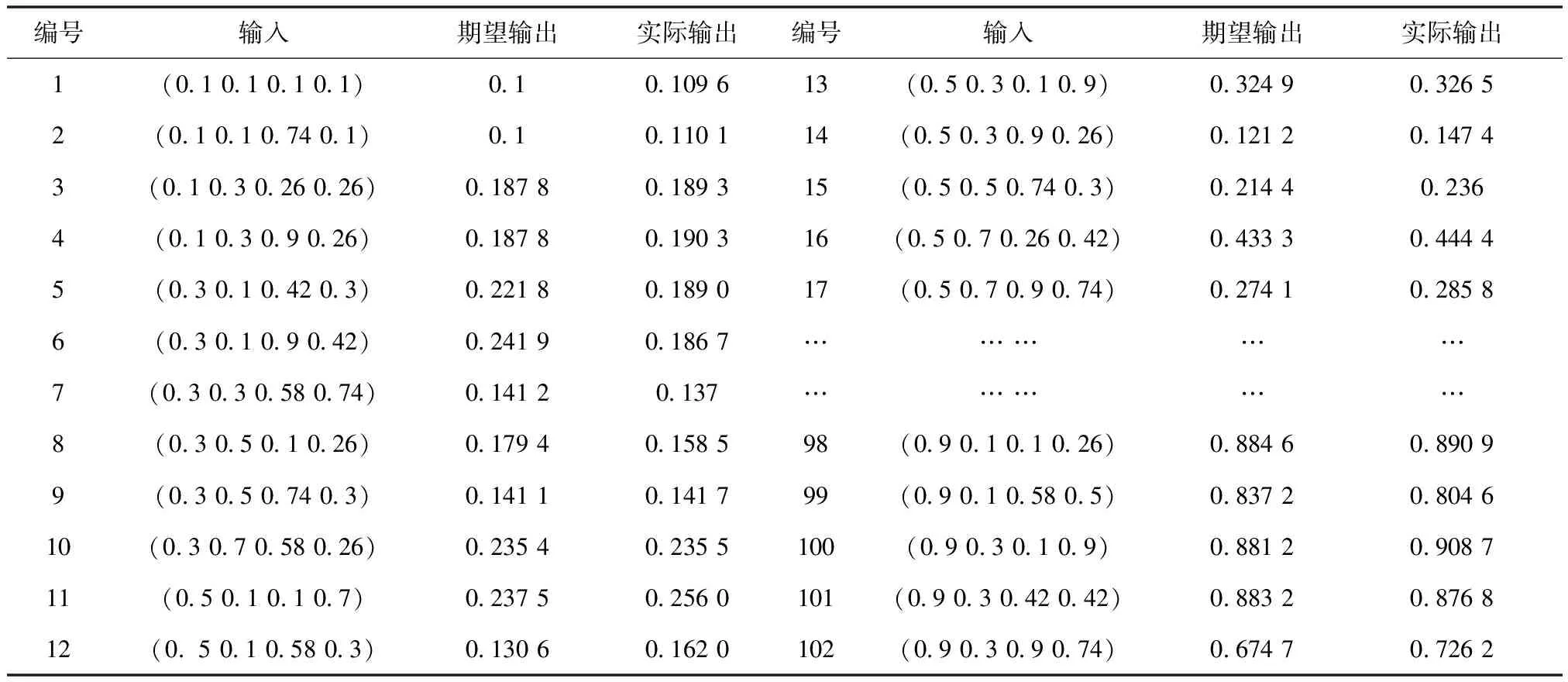
表1 神經網絡輸出
4.3 非線性變換

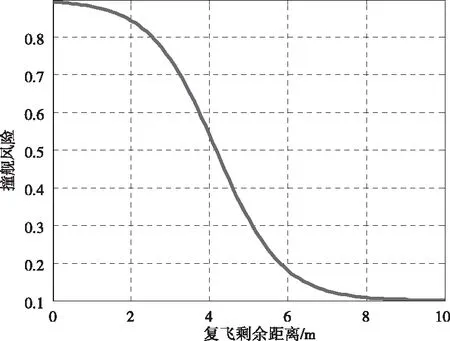
圖6 撞艦風險與復飛剩余距離關系曲線
(6)
(7)
綜上所述,本文建立的復飛狀態風險評價函數綜合表達形式為:
(8)
4.4 過渡復飛風險區域

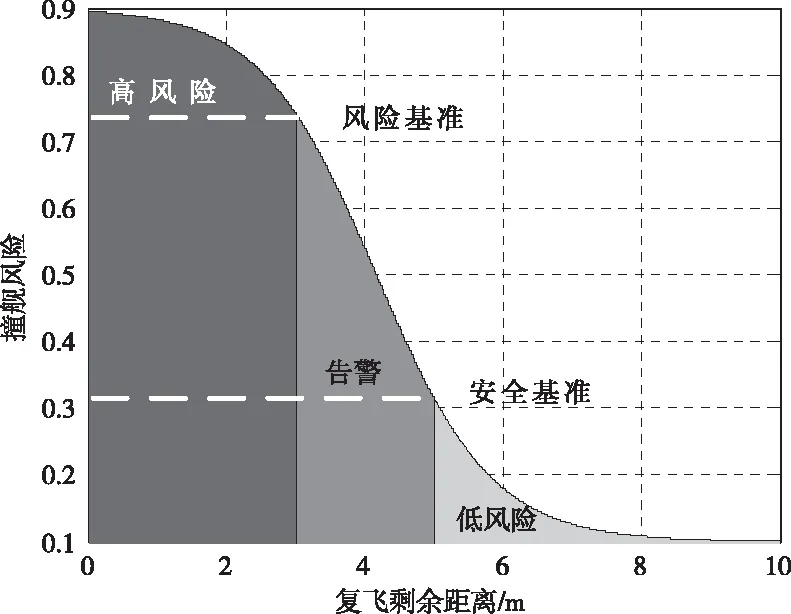
圖7 ΓTransRisk內風險區域



5 復飛風險評測仿真實例
為驗證本文提出的基于神經網絡復飛風險評測方法的準確性,針對不同輸入變量進行仿真,分析其對復飛風險的影響作用。
5.1 飛行速度參量
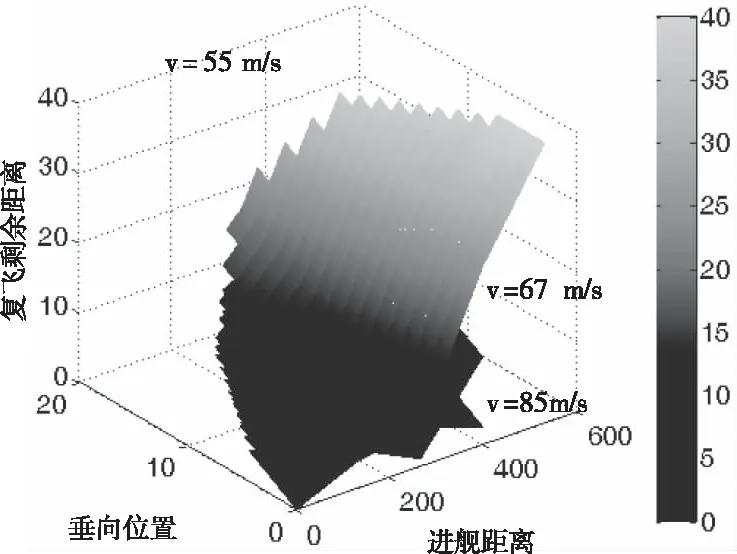
圖8 復飛剩余距離三維曲面
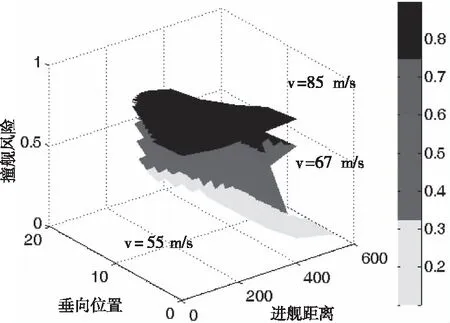
圖9 撞艦風險三維曲面

5.2 干擾下沉率參量

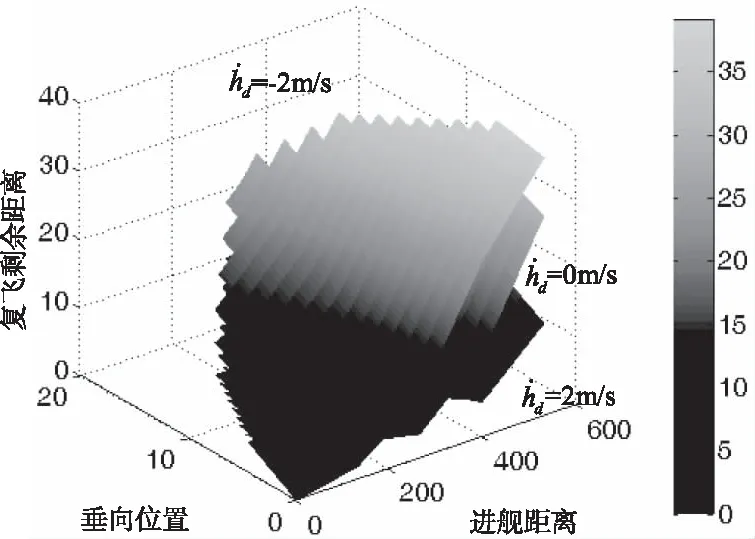
圖10 復飛剩余距離三維曲面
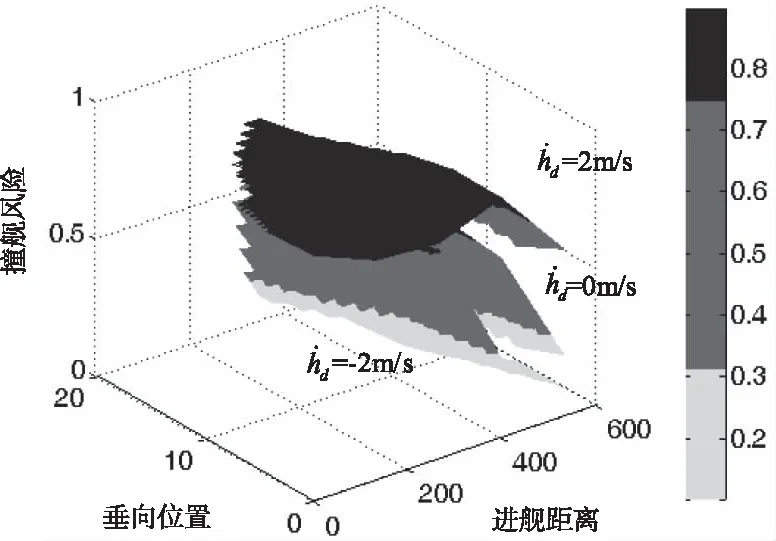
圖11 撞艦風險三維曲面

6 結論
本文在對艦載機復飛機動過程分析的基礎上,建立了軍用推力與升降舵綜合控制復飛運動模型,仿真結果表明多通道協同作用的操控方法降低了復飛過程中的高度損失和駕駛員心理壓力;針對傳統復飛決策技術量化性和實時性的不足,設計基于神經網絡的復飛風險評測方法,通過建立狀態風險建模區域,實時計算艦載機著艦過程的復飛風險,仿真分析不同輸入變量對復飛風險的影響,驗證本文提出的風險評測方法的準確性,對兼顧著艦安全和復飛安全提供了基礎理論支持。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03
