超寬帶室內定位無線時鐘同步設計與實現
2021-10-01 02:40:00陳小磊
電子技術應用 2021年9期
馮 帆,王 軍,陳小磊,吳 春
(中電海康集團研究院,浙江 杭州 310015)
0 引言
隨著物聯網(IOT)技術的發展,各行各業,如危化工廠、養老院、監獄、機場大廳、礦井、隧道等,對室內定位信息的需求也日益增大。對于復雜的室內環境,全球導航衛星系統(GNSS)信號受損嚴重[1],不能提供室精準的室內定位服務,而基于室內定位的服務極具商業價值和潛在應用前景,由此衍生出GNSS 之外的室內定位技術,比如ZigBee 技術[2]、紅外線技術、Wi-Fi 技術[3]、射頻識別(RFID)技術、藍牙(BLE)技術[4]、超聲波技術、超寬帶(UWB)技術[5]等。
相比于室外,室內環境復雜,無線信號在傳播過程中存在反射、折射、衍射等現象,定位源接收到的定位信號受損嚴重,導致定位不準確甚至出現無法定位的情況[6]。一些定位技術,如藍牙、Wi-Fi、紅外線、超聲波等定位技術,由于信號受到室內復雜環境的嚴重干擾,達不到高精度的定位要求,而超寬帶因為其上百兆的帶寬,具有較強的多徑分辨能力、抗干擾能力、穿透力等[7],當用于室內定位時,其在定位結果的精確性和實時性方面具有絕對的優勢[8]。
在基于UWB的室內實時定位系統中,主要是通過基于時間的測距方式來實現對未知目標源的定位,基于到達時間(TOA)的方法和基于達到時間差(TDOA)的方法是常用的UWB 室內定位方法[5],這兩種方法都需要精準的時間測量。由于每個源節點的內部都有獨立的晶體振蕩器,各自按照自己的時鐘體系運轉,不存在相互聯系,從而導致不同源節點之間存在初始的時間差。除了時間差外,各個源節點的晶振之間還存在頻率差,即使所有源節點初始時間相同,即不存在初始時間差,但是因為頻率差的存在,各個源節點的時間讀數也會在一段時間后有所不同,而引起頻率差的原因有很多,如:生產工藝、溫度、濕度、設備老化等。同時,在利用無線信號實現基于時間的測距的過程中,由于無線信號的飛行速度(3×108m/s)的數量級,導致1 μs 鐘差足夠產生300 m的誤差,因此不管是基于TOA 還是TDOA的測距方法,都需要對不同的源節點進行時鐘同步。
對于定位源節點的時鐘同步,目前大體有有線和無線[9]兩種方式。有線同步利用同步控制器連接每個定位源節點,通過有線通信的方式將時間信息傳輸到每個源節點,使得每個源節點都共用一個時鐘系統。無線同步利用源節點之間頻繁的時鐘信息交互,獲取時鐘偏差參數,對本地時鐘進行調整實現時鐘與其他源節點時鐘一致。雖然有線方式的同步精度比無線方式的高,但是在部署簡易度和成本上來說,無線同步方式更有優勢。源節點間的無線通信有單向模式[10]也有雙向模式[11],單向通信模式中某一基站按照一定的頻率發送UWB 信號給其他基站,無需等待其他基站的回復,而雙向通信模式中基站之間按照一定的頻率進行雙向UWB 信息交換,從時隙劃分簡易度和待定位節點并發量方面考慮,顯然單向通信模式優于雙向通信模式。本文采用無線單向通信的同步方式實現定位源節點之間的時鐘同步,同時采用基于TDOA的測距來實現目標源節點的定位。考慮到單個區域[12](一個主基站三個從基站)的定位源節點的部署不足以滿足實際定位場景中較大區域的定位要求,在單個區域的時鐘同步基礎上進行了多區域(多個主基站多個從基站)的時鐘同步設計,實現多區域定位源節點的時鐘同步和待定位節點的定位。
1 單區域時鐘同步設計
針對單區域一主三從的網絡設計,主基站除了負責接收待定位節點的定位幀(BLINK)之外,還需要額外周期性地給另外三個從基站發送同步幀(CCP),從基站之間不存在交互,同時對于主基站的同步幀也不需要進行回復。主基站需要在接收信息和發送信息兩個狀態之間進行切換,從基站只需要一直處于接收狀態,待定位節點也只需要一直處于發送狀態。單區域一主三從時鐘同步和定位系統組成示意圖如圖1 所示。
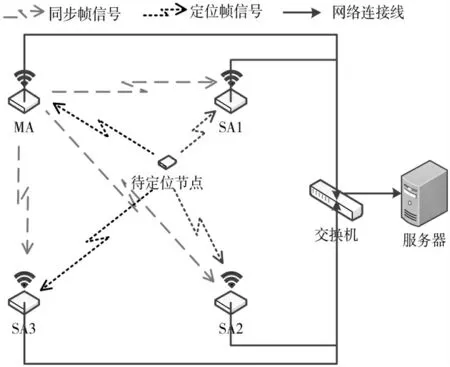
圖1 單區域系統組成示意圖
單區域時鐘同步原理示意圖如圖2 所示。以主基站MA 和從基站SA1 之間的通信為例,當主基站MA 處于發送狀態,發送同步幀CCP 給從基站SA1,同時記錄發送CCP 時間戳txccp01,之后切換至接收狀態,接收待定位節點Tag的定位幀,記錄定位幀接收時間戳blink0,在經過一段固定時間△t0后,主基站MA 再次發送同步幀CCP 給從基站SA1,記錄發送時間戳txccp02;從基站SA1 一直保持接收狀態,分別記錄接收到主基站MA 同步幀的時間戳txccp11、rxccp12和待定位節點Tag 定位幀時間戳blink1。
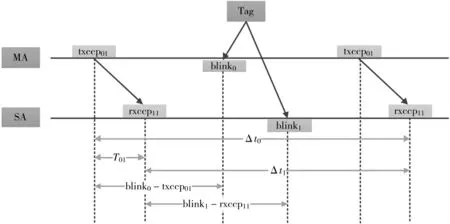
圖2 單區域時鐘同步原理示意圖
當主基站MA 和從基站SA1 處于相同的時鐘體系,即兩者之間不存在初始時間差和頻率差時,很容易得出主基站MA 和從基站SA1 對于待定位節點Tag的TDOA,即:

但是在實際應用場景中,主基站MA 和從基站SA1都有自己的時鐘體系,必然不能直接計算兩者之間的TDOA。
根據圖2 主從基站同步通信過程可知,從基站SA1和主基站MA的定位幀在從基站SA1 接收同步幀CCP的時刻對應的時間差分別為:
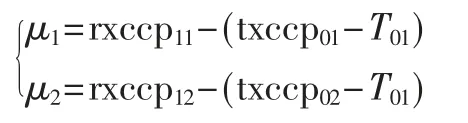
其中T01表示同步幀CCP 從主基站MA 到從基站SA1的飛行時間。
假設在時間段[txccp01,txccp02]內,兩基站的時鐘未發生漂移[13],即時鐘頻率保持不變,從而可得兩者的頻率差為:
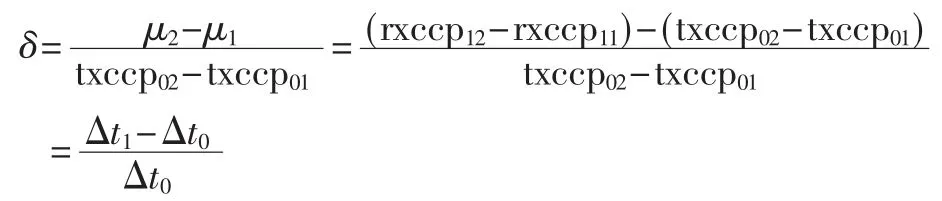
已知主從基站的頻率差,則對于從基站時鐘體系下的某一時間間隔△ts,均可換算成其對應的主基站時鐘體系下的時間間隔△tm,換算關系如下:

其推導過程如下:
以t 表示標準時鐘的讀數,c(t)表示節點本地時鐘在標準時刻t 時的讀數,則節點時鐘與標準時鐘在標準時刻t的時間偏差為:
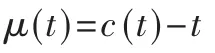
從而可得兩者的時間頻率差[10]為:

即兩者時間偏差的一階導數。
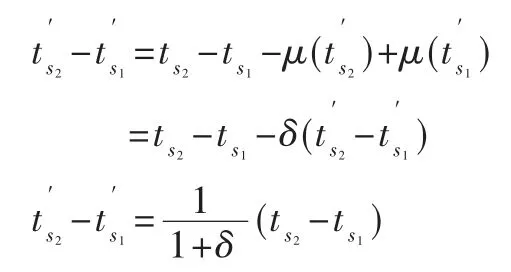
以主基站的時鐘為標準時鐘體系,對于從基站的一個時間間隔,令其本身時鐘體系下的起始時刻和終止時刻分別為和,其所對應的主基站時鐘體系下的時刻分別為和,則存在如下關系:
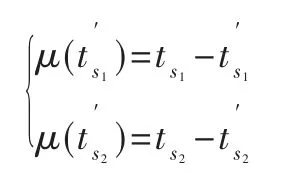
兩式相減并移項得:
根據單區域主從基站時鐘同步原理示意圖可以看出,如果將從基站SA1 時鐘體系下的時間間隔換算成主基站MA 時鐘體系下的時間段,就可以得出從基站SA1與主基站MA 對同一定位幀BLINK的TDOA,即:

由時間段換算關系式(1)可得:

2 多區域時鐘同步設計
在將單區域定位系統擴展成多區域定位系統來滿足更大區域的定位需求的過中,用于定位的源節點的角色不再是以前的主基站和從基站,而需要分成三類基站,即一級主基站、次級主基站和從基站。
一級主基站周期性地發送同步幀CCP 給其從基站和下級主基站,并在發送完CCP 后切換至接收狀態接收標簽定位幀BLINK;次級主基站在接收其上級主基站發送的定位幀CCP 之后,切換至發送狀態并發送同步幀給其下級主基站(若有)和從基站,然后切換至接收狀態接收標簽定位幀BLINK;從基站一直處于接收狀態,接收其上級主基站發送的定位幀CCP 和標簽發送的定位幀BLINK。
本文設計的多區域定位系統以圖3 為例來進行說明。一級主基站MA1的下級主基站為MA2,從基站為SA1 和SA2,該四個基站圍成的區域為第一區域;次級主基站MA2的上級主基站為MA1,下級主基站為MA3,從基站為SA2 和SA3,該四個基站圍成的區域為第二區域;次級主基站MA3的上級主基站為MA2,沒有下級主基站,從基站為SA3、SA4 和SA5,該四個基站圍成的區域為第三區域。在該系統中,對于多個主基站發送的同步幀,次級主基站和從基站只會接收其上級基站發送的同步幀。
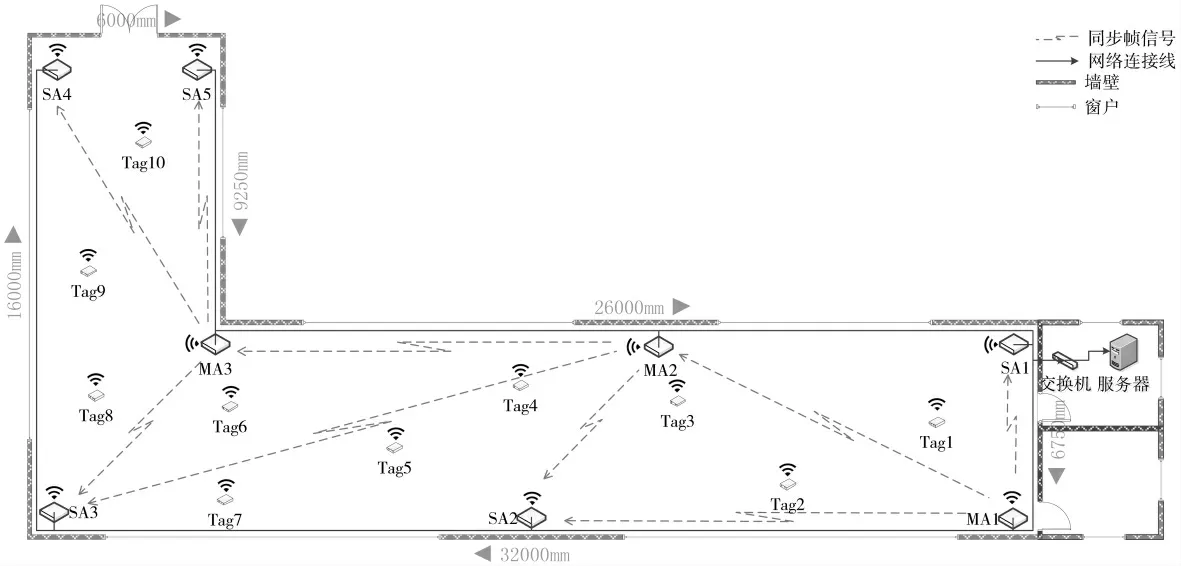
圖3 多區域系統組成示意圖
多區域時鐘同步原理和單區域時鐘同步原理類似,以三個主基站和三區域的某個從基站為例,其原理示意圖如圖4 所示。
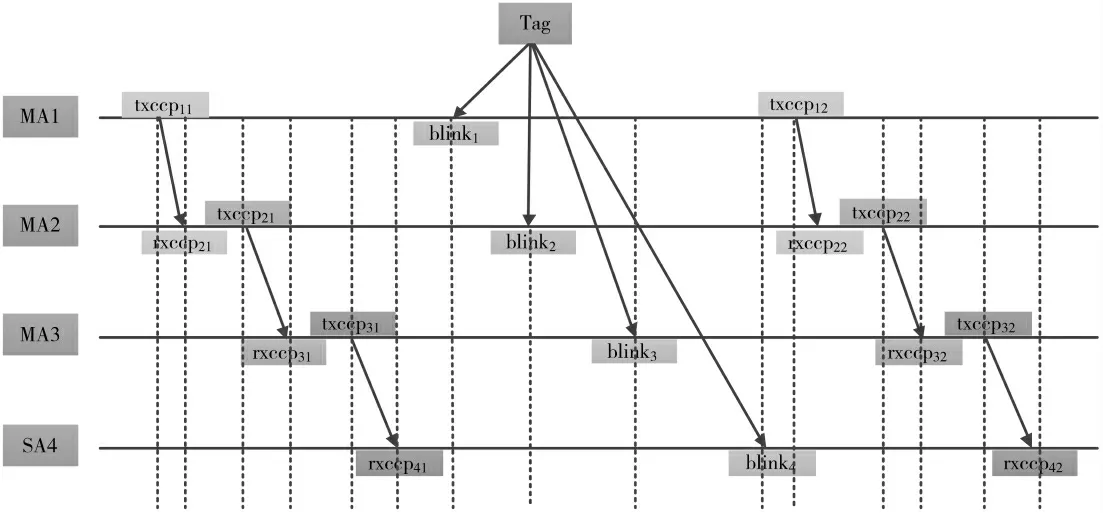
圖4 多區域時鐘同步原理示意圖
為方便多區域基站的時鐘同步,在進行多區域基站的時鐘同步時,將每個基站接收到的標簽定位幀時間戳換算成一級主基站時鐘體系下的時間戳。令:
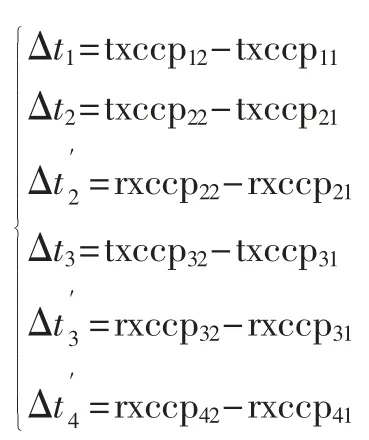
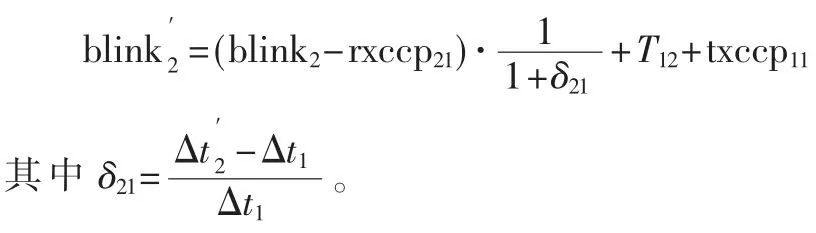
則對于次級主基站MA2 接收到的定位幀BLINK2,其轉換后的值為:
同理,對于次級主基站MA3 和從基站SA4,其轉換后的定位幀時間戳分別為:

第一區域響應定位幀的基站BLINK 時間戳換算可以參考次級主基站MA2的,第二區域的基站參考次級主基站MA3的,第三區域的基站參考從基站SA4的。通過將所有響應標簽定位幀的基站的BLINK 時間戳轉換成一級主基站時鐘體系下的時間戳后,在定位階段,可選任以基站作為定位參考基站,均可以計算其余基站與該基站的TDOA,從而進行基于TDOA的位置解算,實現對目標源節點的定位。
3 測試驗證和結果分析
在測試時鐘同步效果時,采用了一主一從兩基站進行驗證,此時標簽置于兩基站正中間,理論上來說,此時標準TDOA 應該為0,本文分別測試了兩個基站不同距離時所估計的TDOA 大小,并與標準值進行比較,比較結果如圖5 所示。
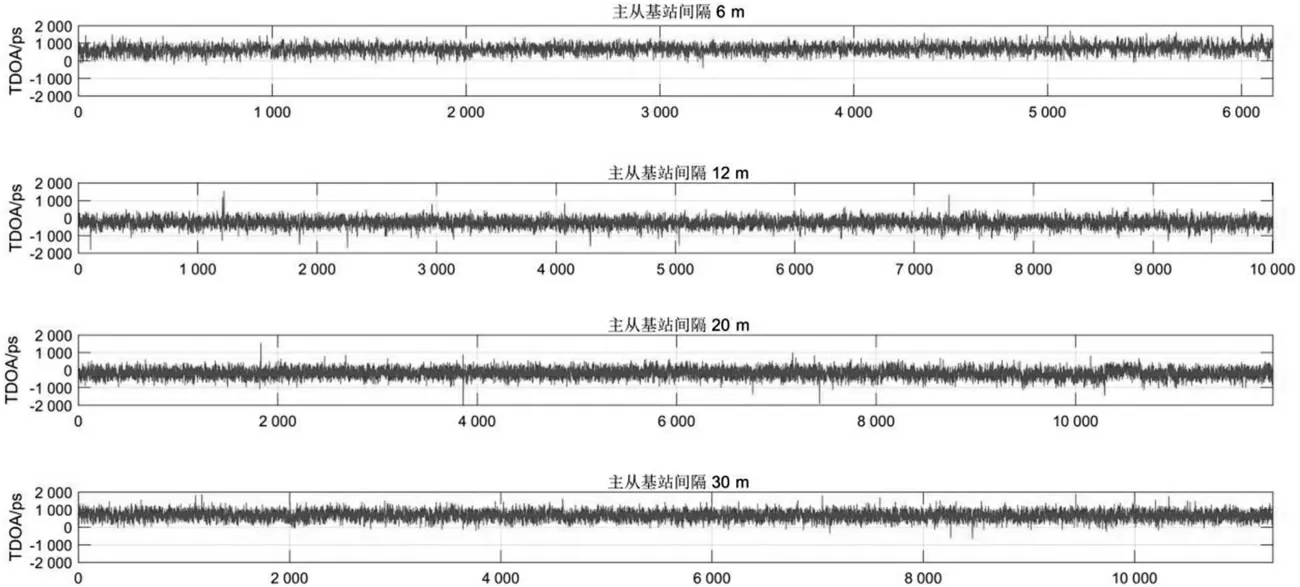
圖5 主從基站預估TDOA與標準值的比較
在測試驗證定位效果時,選擇某室內場地作為測試場景,其示意圖如圖3 所示,各個基站的坐標分別如下:MA1(0,0),MA2(12,6),MA3(26,6),SA1(0,6),SA2(16,0),SA3(31,0),SA4(31,15),SA5(26,15)。實測過程中,每個區域選取了一個點進行定點測試,且這些點也代表了區域內部點、區域邊界附近點以及區域重合附近點,累計誤差概率圖如圖6 所示。
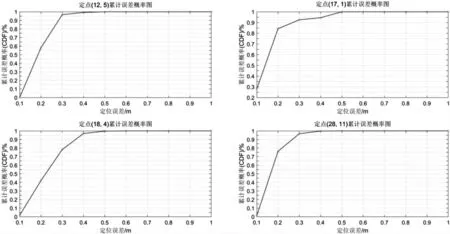
圖6 多區域不同點的定點測試結果
從測試結果可以看出,在實際定位場景中,對于一主一從兩基站的TDOA 預估與標準值的誤差在±1 000 ps左右,而且對于多區域不同區域的定點測試,定位結果的定位誤差低于0.4 m的概率不低于95%。
4 結論
本文在單區域(一主三從)UWB 定位基站時鐘同步的基礎上,提出了一種適用于較大區域的時鐘同步方案,并利用實際室內環境進行測試,測試結果表明,該時鐘同步系統能夠達到較好的同步效果,并能夠取得較好的定位效果。
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國共青團(2015年7期)2015-12-17 01:24:38
電測與儀表(2015年5期)2015-04-09 11:30:52
中學生數理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44