采用桿組法的織機開口機構運動學分析及其仿真
2021-09-26 01:59:46陳育明
黎明職業大學學報 2021年2期
陳育明
(黎明職業大學 智能制造工程學院, 福建 泉州 362000)
織機的綜框由上下橫梁、左右綜桿及驅動件構成,是織機中的重要組成部分。經紗穿入綜框上配置的片綜匯成一體,跟隨織機的提綜機構進行運動,此時綜框根據織機開口機構的設計按照一定規律上下往復運動,隨著緯紗在經紗中來回往復穿梭、經紗分層開口,經紗與緯紗不斷交織形成織物的不同花紋,驅動綜框上下有規律運動的開口機構的運動狀態直接關系到織物的編織質量、生產效率。因此,對開口機構的運動學分析顯得尤為重要。常見的織機開口機構通常采用平面連桿開口機構、凸輪開口機構等機構形式。平面連桿開口機構具有結構簡單、易加工、機構磨損小、適應高速等優點。織機開口機構的運動學分析設計主要有解析法和軟件建模仿真等方法[1-2]。目前,國內的織機開口機構運動學分析主要采用幾何建模運動仿真的方法,而采用解析法較少[3-4]。解析法需要進行數學建模并進而求解,這種方式難度大但結果精確。SolidWorks軟件具有功能強大、易學易用和技術創新三大特點。基于此,本文將以平面六桿織機機構為例,采用桿組法對機構進行運動學分析,并運用Solidworks軟件來進行織機開口機構的幾何建模,并對機構進行運動學仿真。將理論分析和建模仿真的結果進行對照,以確認理論分析的準確性和仿真結果的可靠性。
1 織機開口機構的桿組法運動學分析
圖1為織機開口機構的簡圖,為平面六桿機構。桿件AB為曲柄,是機構主動件,在外力驅動下做360°回轉。桿件CF在搖桿DE與連桿BD的帶動下驅動擺臂FG(即雙臂桿HI)做往復擺動進而驅動兩個綜框KM及JN按照一定的規律上下往復運動。根據桿組法,AB桿與機架轉動副連接,是LINK一級桿組;BD與DE構成RRRⅡ級桿組;擺臂FG與連桿FC構成RRRⅡ級桿組;桿件HK與綜框KM構成RRPⅡ級桿組(同理,桿件IJ與綜框JN也構成RRPⅡ級桿組)。
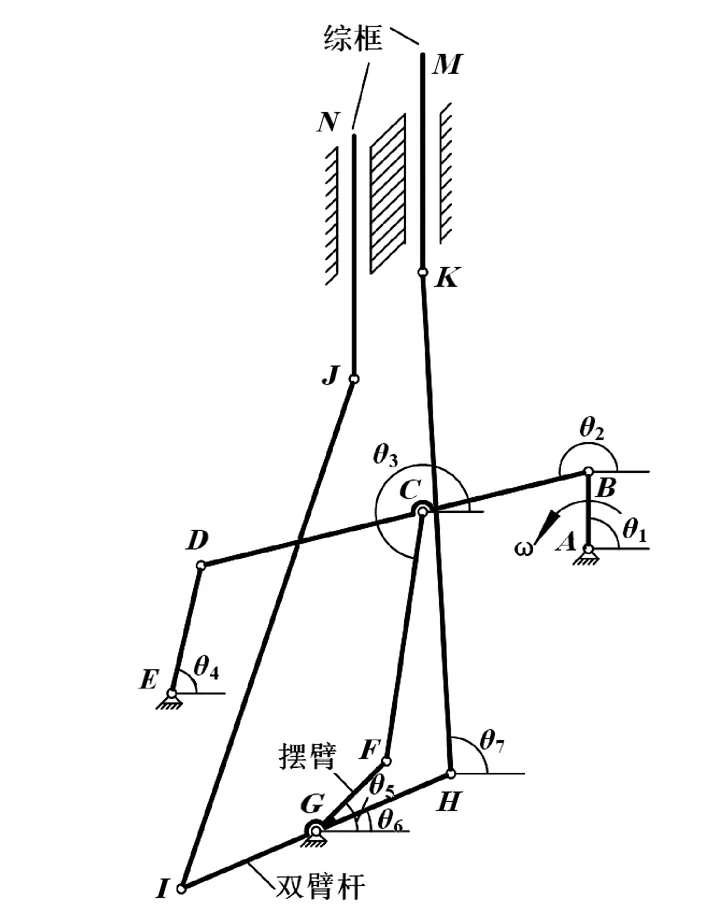
圖1 織機開口機構簡圖
1.1 織機開口機構運動學分析步驟
從主動件曲柄AB入手,以θ1為起點,令θ1從0°到360°進行循環,后采用桿組法分析,具體步驟如下。
步驟1 調用LINK子程序,求出點B的位置參數及運動參數;
步驟2 調用RRR(BDE) Ⅱ級桿組子程序(BDE代表該桿組B、D、E三點按照逆時針順序進行裝配排列),可求得BD桿的運動參數θ2、ω2、ε2及DE桿的運動參數θ3、ω3、ε3,角度為桿件與OX正向間的夾角,下同;
步驟3 根據前兩個步驟求得的BD桿件的運動參數,再調用LINK子程序,可求得C點的位置及運動參數;
步驟4 調用RRR(CFG) Ⅱ級桿組子程序,可求出CF桿及FG桿的運動學參數;
步驟5 根據步驟4求出的FG桿件的運動學參數,可確定GH桿件的運動參數θ6、ω6、ε6,進而調用LINK子程序求得H點的位置參數及運動學參數;
步驟6 根據H的參數,調用RRP(HK) Ⅱ級桿組子程序,可求得桿件HK的運動規律;
步驟7 以H為基點再次調用LINK子程序,求得K點的位置參數以及運動學參數。
1.2 實例
以44英寸(111.76 cm)的噴氣式織機為例,結合圖1,得已知條件:點A坐標XA=0,YA=0;點E坐標XE=-360,YE=-127;點G坐標XG=-248,YG=-274;各桿件長度LAB=60 mm,LBC=190 mm,LBD=360 mm,LDE=140mm,LCF=280 mm,LFG=55 mm,LGH=LGI=110 mm、LHK=LIJ=520 mm。擺臂GF和雙臂桿IH為同一構件,二者間偏角(即θ5-θ6)為20°;KM導軌與機架原點A偏距為170 mm。由于桿組程序采用TrueBasic進行編寫,過程中無法輸入希臘字母,因此各桿件的角度θ、角速度ω及角加速度ε分別用形近的字母Q、W、E表示;綜框KM和JN運動規律應為一致,時間錯開,故僅以KM為例進行分析,JN類同。
根據上述的運動學分析步驟及織機實例,可編制下列主程序,以求得綜框KM的位置及運動參數,進而可分析綜框的運動規律。
FOR Q1=0 TO 360 STEP 5
CALL LINK(0,0,0,0,0,0,Q1*PI/180,350,0,60,XB,YB,VBX,VBY,ABX,ABY)
CALL RRR(XB,YB,VBX,VBY,ABX,ABY,-360,-127,0,0,0,0,360,140,Q2,W2,E2,Q3,W3,E3)
CALL LINK(XB,YB,VBX,VBY,ABX,ABY,Q2,W2,E2,190,XC,YC,VCX,VCY,ACX,ACY)
CALL RRR(XC,YC,VCX,VCY,ACX,ACY,-248,-274,0,0,0,0,280,55,Q4,W4,E4,Q5,W5,E5)
LET Q6=Q5-20*PI/180
CALL LINK(-248,-274,0,0,0,0,Q6,W5,E5,110,XH,YH,AHX,VHY,AHX,AHY)
CALL RRP(-1,-170,520,XH,VHX,AHX,Q7,W7,E7)
CALL LINK(XH,YH,AHX,VHY,AHX,AHY,Q7,W7,E7,520,XK,YK,VKX,VKY,AKX,AKY)
PRINT Q1,XK,YK,VKX,VKY,AKX,AKY
NEXT Q1
END
根據程序運算得出綜框KM的位移、速度及加速度數據,導入Excel生成綜框KM的位移變化、速度變化及加速度變化曲線圖分別如圖2-4所示。
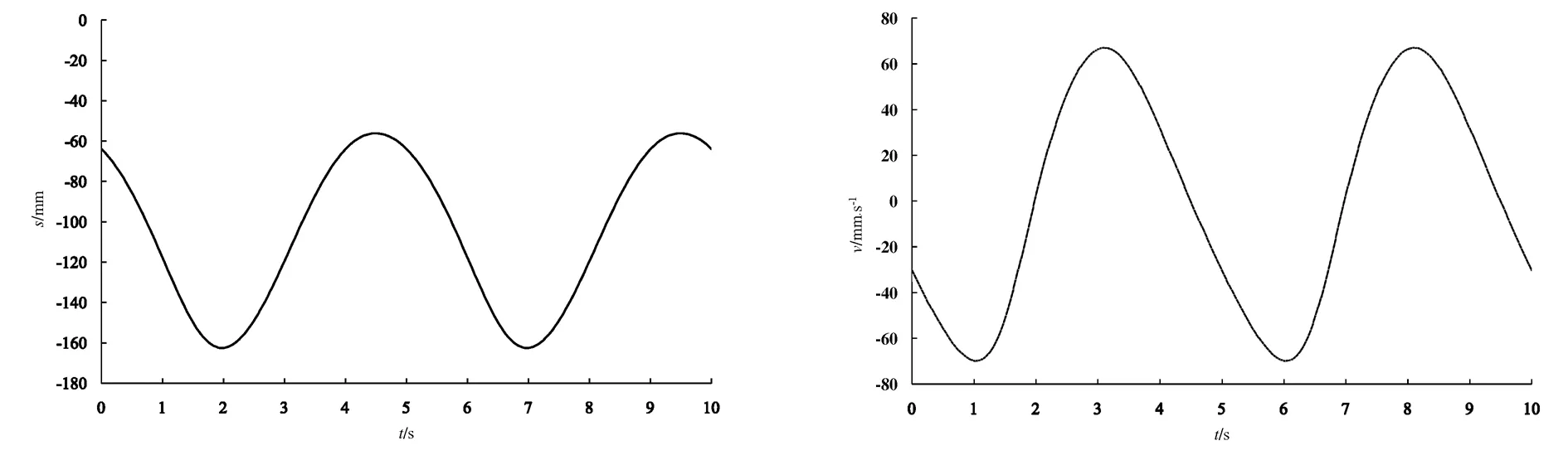
圖2 KM位移-時間計算曲線 圖3 KM速度-時間計算曲線
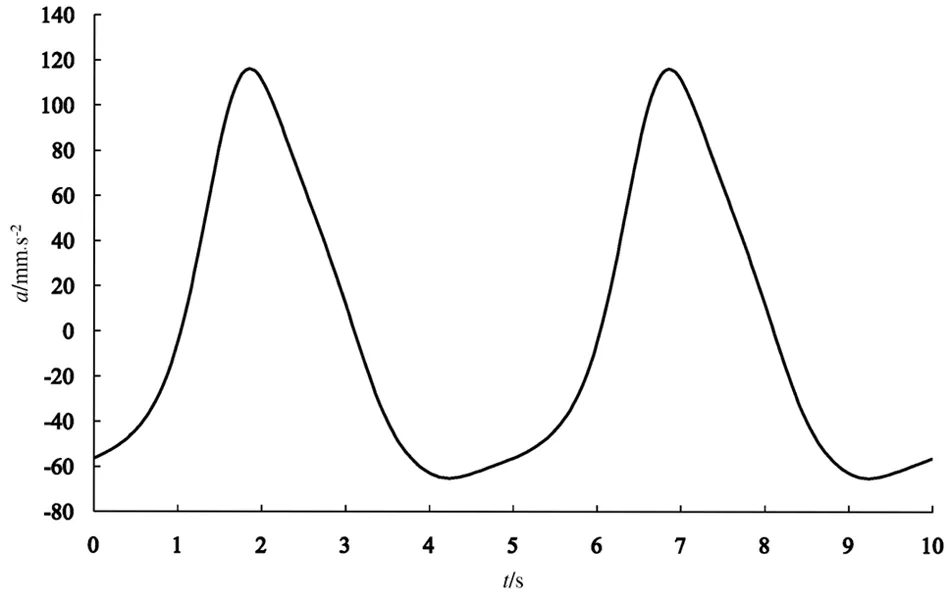
圖4 KM加速度-時間計算曲線
根據圖2-4可知,在主動曲柄AB勻速回轉驅動下,綜框KM的運動規律,綜框JN同理。除此之外,也可利用桿組法求得其余個桿件的位置參數及運動規律。
2 織機開口機構的運動仿真
2.1 開口機構建模
運用Solidworks軟件的零件設計模塊、裝配模塊以及運動仿真模塊。在建模階段,先根據測繪尺寸進行零件建模,再按照各個零件的約束方式進行裝配,最后通過運動學仿真來驗證分析該開口機構的運動狀態。建立的織機開口機構幾何模型如圖5所示。
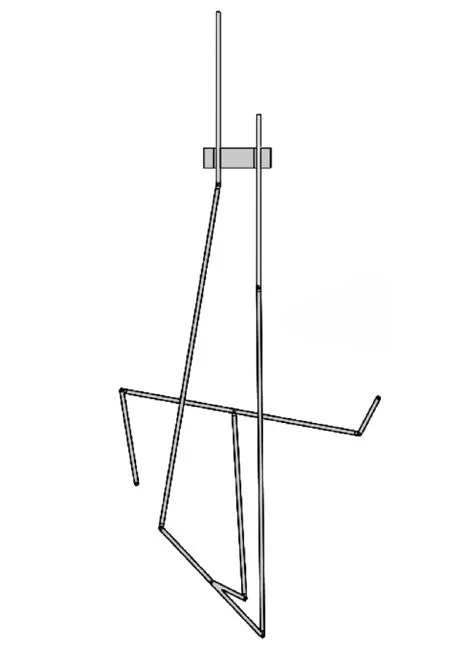
圖5 織機開口機構幾何模型
2.2 開口機構運動學仿真
通過在圖1中主動曲柄AB添加馬達進行驅動來控制裝配體的運動以實現裝配體運動模擬。同時采用軟件的仿真和實時測量功能,得到綜框(以KM為例)的位移、速度及加速度的變化曲線,如圖6-8所示。
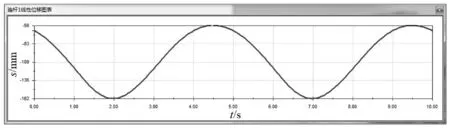
圖6 KM位移-時間仿真曲線
由圖7可知,綜框KM的速度正向峰值為67 mm·s-1,反向峰值為-70 mm·s-1,說明綜框的運動規律、穩定。由圖8可知,綜框KM的加速度正向峰值為116 mm·s-2,反向峰值為-65 mm·s-2,說明綜框向上的工作行程的沖擊大于回程。
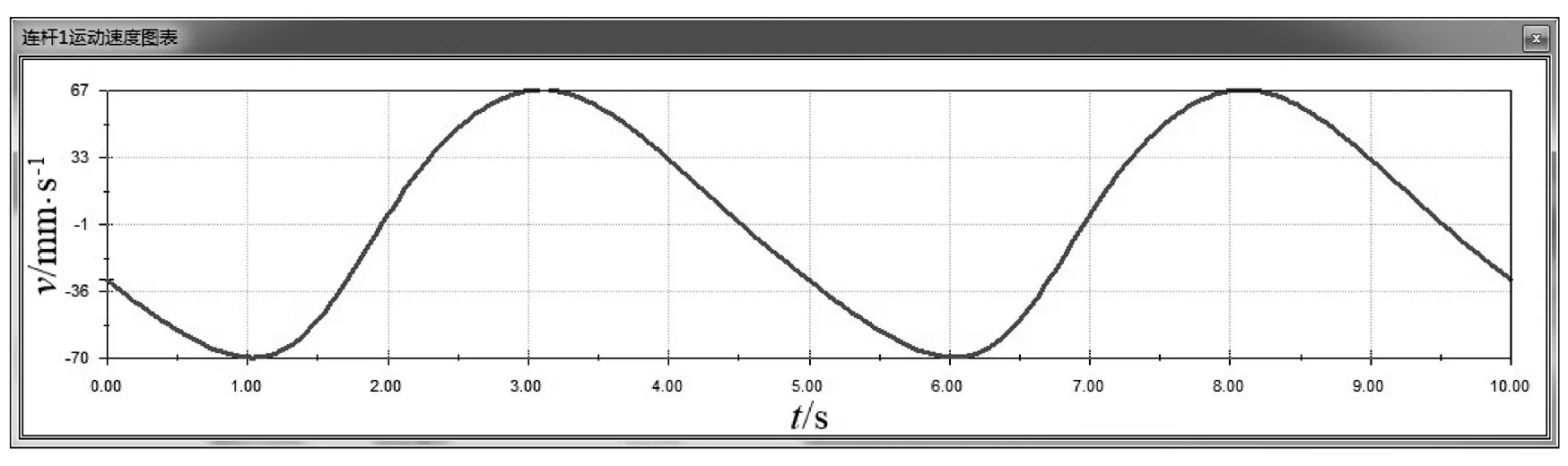
圖7 KM速度-時間仿真曲線
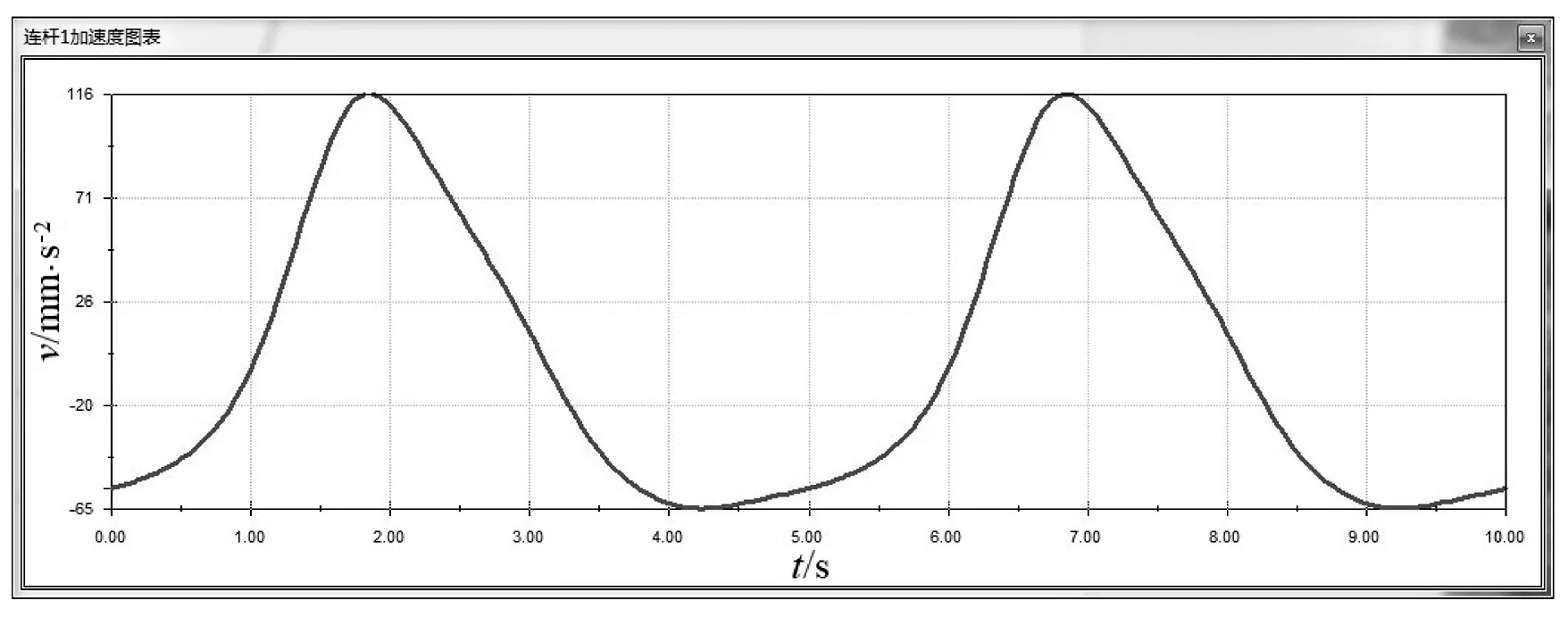
圖8 KM加速度-時間仿真曲線
比較由桿組法得到的綜框KM運動規律圖,與利用Solidworks仿真得到的綜框KM運動規律圖,二者運動規律圖基本吻合,形成相互驗證。
3 結 論
采用桿組法建立織機開口機構的數學模型,對其進行運動學分析,計算得出輸出構件綜框的運動規律。借助Solidworks軟件對輸出構件綜框進行建模與仿真,仿真結果與分析計算結果互相驗證,說明利用桿組法對工程機構進行分析行之有效,利用Solidworks對工程機構仿真結果可靠。從分析計算和仿真結果來看,該開口機構輸出構件綜框運動到極限位置時速度接近于0,但加速度值偏大,具有一定沖擊性,與實際生產的理想狀態還有差距,將在今后進一步探討綜框減少運動沖擊的方法。
