多相感應(yīng)電機(jī)開路故障情況下的分析與研究
2021-09-10 07:22:44駱海燕
交通科技與管理 2021年2期
駱海燕

摘 要:多相感應(yīng)電機(jī)因其優(yōu)越的容錯(cuò)性能,非常適用對(duì)運(yùn)行系統(tǒng)的可靠性要求很高的大功率工業(yè)應(yīng)用場(chǎng)合。本文以七相感應(yīng)電機(jī)為研究對(duì)象,通過MATLAB/Simulink仿真軟件,對(duì)七相感應(yīng)電機(jī)不同缺相故障進(jìn)行仿真數(shù)據(jù)研究,并在此基礎(chǔ)上分析了多相感應(yīng)電機(jī)開路故障下的性能特點(diǎn)及研究。
關(guān)鍵詞:多相感應(yīng)電機(jī);開路故障;缺相;MATLAB仿真
0 引言
由于目前大功率電力電子技術(shù)的快速發(fā)展,在某些對(duì)運(yùn)行系統(tǒng)的可靠性要求很高的工業(yè)應(yīng)用場(chǎng)合,當(dāng)電機(jī)在運(yùn)行中出現(xiàn)電機(jī)本體故障和逆變器故障等,即發(fā)生缺相情況后,將造成整個(gè)電機(jī)推進(jìn)系統(tǒng)可靠性的下降,本文主要研究的是電氣方面的故障,即定子繞組發(fā)生故障時(shí),感應(yīng)電機(jī)則變成了缺相運(yùn)行,傳統(tǒng)的三相異步電動(dòng)機(jī)其可靠性就大大下降,且基本無法運(yùn)行。而多相電機(jī)調(diào)速系統(tǒng)在故障下能維持系統(tǒng)繼續(xù)運(yùn)行的特點(diǎn),為保證系統(tǒng)在電機(jī)發(fā)生缺相情況下仍可以繼續(xù)較為穩(wěn)定地運(yùn)行,研究其故障下的特性,并借鑒成熟的三相變頻技術(shù),提高功率輸出的同時(shí)并保證系統(tǒng)的可靠性。
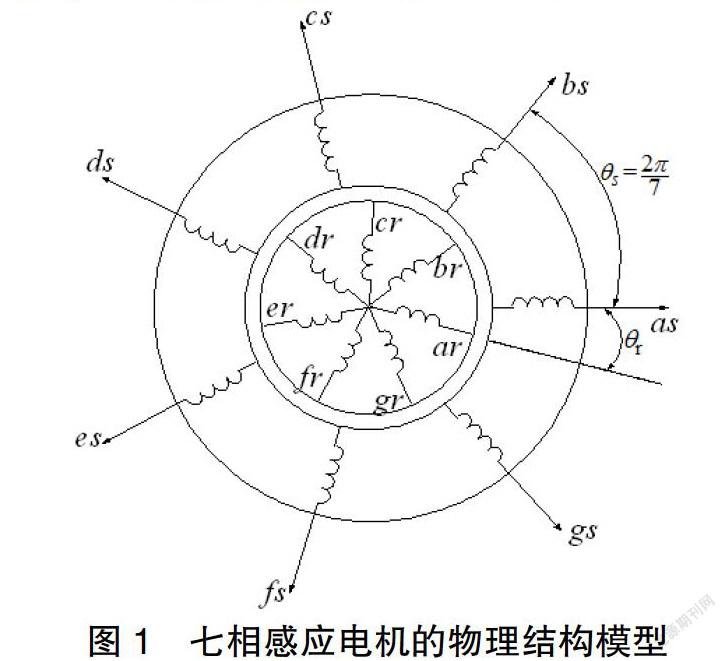
本文研究的七相感應(yīng)電機(jī)的物理結(jié)構(gòu)模型如圖1所示。電機(jī)定子側(cè)繞組在空間上均勻分布,各繞組在空間位置上互差角度[1]。轉(zhuǎn)子繞組采用標(biāo)準(zhǔn)鼠籠型結(jié)構(gòu),構(gòu)建物理模型時(shí),其在空間位置上也互差角度,其中定子繞組與轉(zhuǎn)子繞組之間的空間位置角定義為。
1 七相感缺相數(shù)學(xué)模型
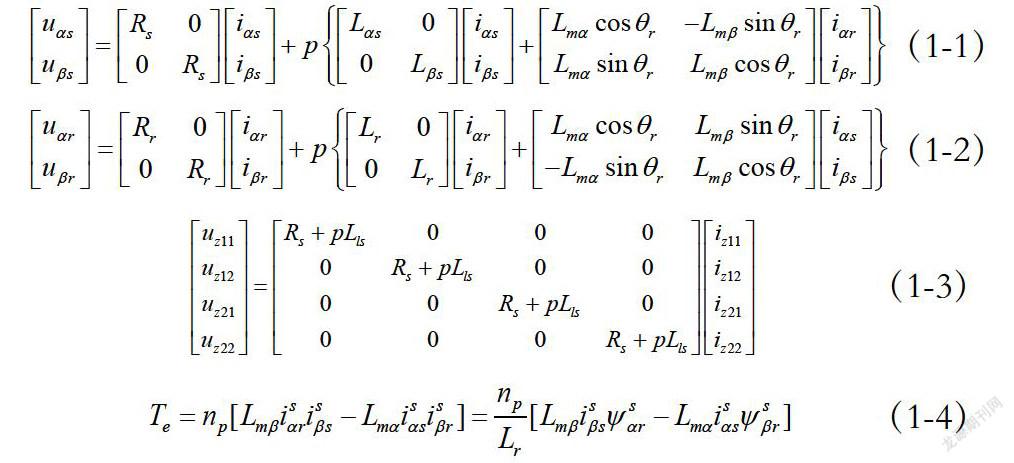
多相感應(yīng)電機(jī)繞組由于缺相變成完全不對(duì)稱,不能再用正常時(shí)的電機(jī)數(shù)學(xué)模型進(jìn)行分析。下面建立其缺相情況下的電機(jī)數(shù)學(xué)模型。
七相感應(yīng)電機(jī)定子繞組最后一相g相開路時(shí),此時(shí)電機(jī)進(jìn)入不對(duì)稱運(yùn)行狀態(tài),為了降低電機(jī)缺相后定子繞組的不平衡度,借鑒正常情況下七相感應(yīng)電機(jī)數(shù)學(xué)模型的等效思想,可以將其看成一個(gè)六維的系統(tǒng),對(duì)其建立數(shù)學(xué)模型[2]。
經(jīng)過數(shù)學(xué)整理后,構(gòu)成了七相感應(yīng)電機(jī)缺一相后的數(shù)學(xué)模型。
從缺g相后的數(shù)學(xué)模型可以看出,正常情況下電機(jī)定轉(zhuǎn)子互感的α軸分量Lmα和β軸分量Lmβ是相等的,但缺相后由于電機(jī)結(jié)構(gòu)和空間位置進(jìn)行了變化,此時(shí)α軸分量Lmα和β軸分量Lmβ已經(jīng)不再相等,這是由于電機(jī)某一相缺失后,電機(jī)繞組在空間結(jié)構(gòu)已經(jīng)發(fā)生了改變,剩余相繞組的合成定子漏感對(duì)比正常情況時(shí)也已經(jīng)完全不同,這將導(dǎo)致定子磁鏈軌跡不再為圓形,將變?yōu)闄E圓形,并且隨著所缺相數(shù)的增多,Lmα與Lmβ差別程度通常呈變大趨勢(shì)[3]。
2 七相感應(yīng)電機(jī)缺相運(yùn)行仿真
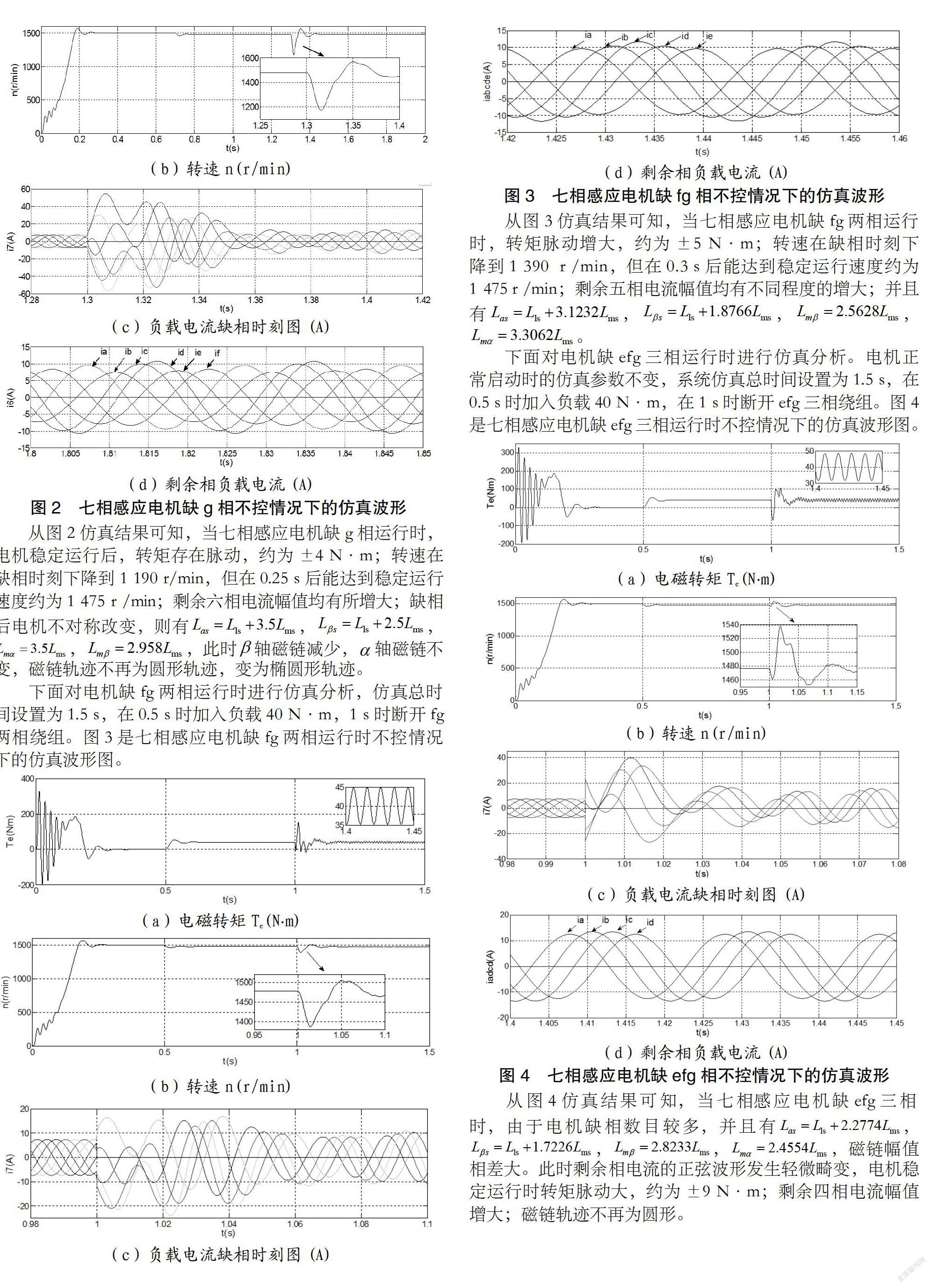
在MATLAB/Simulink下對(duì)七相感應(yīng)電機(jī)正常運(yùn)行時(shí)建模,設(shè)置感應(yīng)電機(jī)仿真參數(shù)為:轉(zhuǎn)動(dòng)慣量J=0.144 kg?m2,極對(duì)數(shù)Np=2,額定頻率fN=50 Hz,定子電阻Rs =0.567 3 Ω,轉(zhuǎn)子電阻Rr =1.123 Ω,定子電感Ls =0.226 8 H,轉(zhuǎn)子電感Lr=0.226 8 H,定轉(zhuǎn)子互感Lm= 0.216 H,定子自漏感Lls=0.009 7 H。系統(tǒng)仿真總時(shí)間設(shè)置為2 s,空載起動(dòng),在0.7 s時(shí)加載40 N·m,在1.3 s時(shí)利用一個(gè)階躍信號(hào),模擬電機(jī)突然缺一相的情況,切除電機(jī)g相繞組。圖2是七相感應(yīng)電機(jī)缺g相運(yùn)行時(shí)不控情況下的仿真波形圖。
從圖2仿真結(jié)果可知,當(dāng)七相感應(yīng)電機(jī)缺g相運(yùn)行時(shí),電機(jī)穩(wěn)定運(yùn)行后,轉(zhuǎn)矩存在脈動(dòng),約為±4 N·m;轉(zhuǎn)速在缺相時(shí)刻下降到1 190 r/min,但在0.25 s后能達(dá)到穩(wěn)定運(yùn)行速度約為1 475 r /min;剩余六相電流幅值均有所增大;缺相后電機(jī)不對(duì)稱改變,則有,,,,此時(shí)軸磁鏈減少,軸磁鏈不變,磁鏈軌跡不再為圓形軌跡,變?yōu)闄E圓形軌跡。
下面對(duì)電機(jī)缺fg兩相運(yùn)行時(shí)進(jìn)行仿真分析,仿真總時(shí)間設(shè)置為1.5 s,在0.5 s時(shí)加入負(fù)載40 N·m,1 s時(shí)斷開fg兩相繞組。圖3是七相感應(yīng)電機(jī)缺fg兩相運(yùn)行時(shí)不控情況下的仿真波形圖。
從圖3仿真結(jié)果可知,當(dāng)七相感應(yīng)電機(jī)缺fg兩相運(yùn)行時(shí),轉(zhuǎn)矩脈動(dòng)增大,約為±5 N·m;轉(zhuǎn)速在缺相時(shí)刻下降到1 390? r /min,但在0.3 s后能達(dá)到穩(wěn)定運(yùn)行速度約為1 475 r /min;剩余五相電流幅值均有不同程度的增大;并且有,,,。
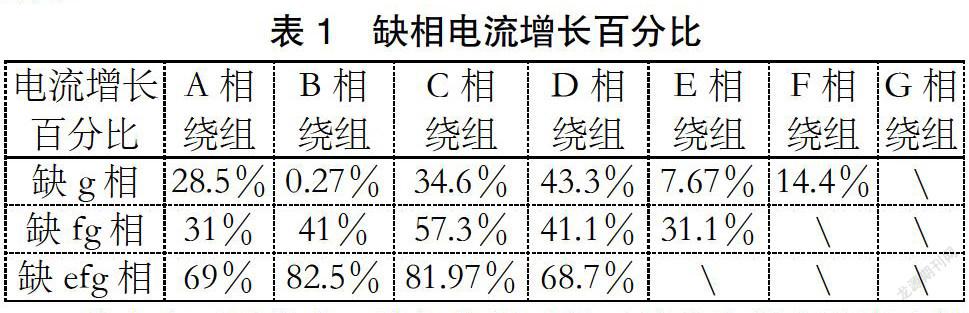
下面對(duì)電機(jī)缺efg三相運(yùn)行時(shí)進(jìn)行仿真分析。電機(jī)正常啟動(dòng)時(shí)的仿真參數(shù)不變,系統(tǒng)仿真總時(shí)間設(shè)置為1.5 s,在0.5 s時(shí)加入負(fù)載40 N·m,在1 s時(shí)斷開efg三相繞組。圖4是七相感應(yīng)電機(jī)缺efg三相運(yùn)行時(shí)不控情況下的仿真波形圖。
從圖4仿真結(jié)果可知,當(dāng)七相感應(yīng)電機(jī)缺efg三相時(shí),由于電機(jī)缺相數(shù)目較多,并且有,,,,磁鏈幅值相差大。此時(shí)剩余相電流的正弦波形發(fā)生輕微畸變,電機(jī)穩(wěn)定運(yùn)行時(shí)轉(zhuǎn)矩脈動(dòng)大,約為±9 N·m;剩余四相電流幅值增大;磁鏈軌跡不再為圓形。
由上述仿真結(jié)果,進(jìn)行電流增大比例數(shù)據(jù)分析,如表1所示。
從表中可以得出,缺相繞組對(duì)最遠(yuǎn)處的繞組電流影響最大,缺相后剩余相的電流幅值隨著開路相數(shù)的增多,電流增大百分比隨之升高,在缺相數(shù)目較多時(shí),這將不利于電機(jī)的運(yùn)行。
3 結(jié)束語
本文在已有多相電機(jī)系統(tǒng)的研究基礎(chǔ)上,通過軟件仿真研究分析七相感應(yīng)電機(jī)在缺任意一相時(shí),電機(jī)參數(shù)變化相似,轉(zhuǎn)速和轉(zhuǎn)矩脈動(dòng)不大;當(dāng)七相感應(yīng)電機(jī)缺任意兩相時(shí),相互之間不構(gòu)成正交兩相,此時(shí)所缺兩相夾角越接近0°或180°,α軸和β軸磁鏈幅值相差越大,產(chǎn)生的轉(zhuǎn)矩和轉(zhuǎn)速脈動(dòng)就越大;當(dāng)七相感應(yīng)電機(jī)缺任意三相時(shí),電機(jī)的不平穩(wěn)度增加,轉(zhuǎn)速和轉(zhuǎn)矩脈動(dòng)加大。仿真結(jié)果表明多相感應(yīng)電機(jī)在發(fā)生故障后,擁有能夠繼續(xù)穩(wěn)定運(yùn)行的特點(diǎn),為多相感應(yīng)電機(jī)后續(xù)的分析研究提供一定的理論依據(jù)。
參考文獻(xiàn):
[1]郭冀嶺.七相感應(yīng)電機(jī)控制技術(shù)研究[D].西南交通大學(xué),2015.
[2]魏永清.十二相永磁電機(jī)驅(qū)動(dòng)系統(tǒng)的容錯(cuò)控制策略[J].電工技術(shù)學(xué)報(bào),2019,34(21):4467-4473.
[3]宋百洋.九相感應(yīng)電機(jī)對(duì)稱缺相穩(wěn)態(tài)運(yùn)行研究[D].青島大學(xué),2019.
