面向復雜環境中車牌識別的CNN網絡模型設計與實現
2021-09-10 07:22:44楊中岳
交通科技與管理 2021年2期
楊中岳






摘 要:傳統的車牌識別實現方案大多數是良好的環境情況下,但是不能滿足復雜場景中的需求且其方案不具備魯棒性。復雜環境如冬季大霧傳統方案則難以實現車牌識別,為此,在霧天條件下提高車牌識別準確性和魯棒性是本文的研究重點。本文介紹了大霧天氣下車牌圖像的去霧問題及解決方法通過CNN模型的車牌識別的實現方案,提高霧天車牌識別的效率,且具備魯棒性。
關鍵詞:車牌識別;魯棒性;CNN;圖像處理
0 引言
隨著社會的進步,人們生活水平地提高,越來越多的人選擇開私家車出行的方式,車輛增多帶來了智能高效的車牌識別問題。傳統的識別方法包括模板匹配,支持向量機等模板匹配的識別方法簡單,但識別效率較低相應的識別率較低,尤其是漢字。特別是隨著環境的逐漸惡化,空氣污染日趨嚴重,在霧霾或霧中駕車的幾率大大增加[1]。傳統車牌識別是基于正常天氣下光線好的車牌識別率較高。然而,由于環境的不確定性,在霧等異常光照條件下識別車牌。由于霧天能見度降低,人們的視線和相機無法正常采集清晰的圖像數據,這使得車牌識別更加困難[2]。隨著深度學習的發展,其應用越來越廣泛。特別是近年來使用CNN應用于圖像處理取得較好的效果[3]。與傳統的字符識別技術中,本文所實現的網絡模型可以克服字符識別率低、識別速度慢等技術難點,其識別率可達99%左右。
1 相關工作
本章節對車牌識別相關技術進行了相應的介紹。模板匹配[4]的方法是通過車牌定位,經過一系列的處理,如,字符分割,同時建立車牌字符庫,經過分割對車牌字符進行規范化處理,分割后的車牌與一一對應字符庫匹配,最后選擇最佳匹配的結果作為預測結果輸出。支持向量機[5,6]是機器學習中的一種方法,通過對車牌字符進行分類高維空間映射機制,首先對車牌字符進行分割,然后在視覺庫中使用支持向量機模塊進行訓練。
卷積神經網絡是一種專門為圖像處理而設計的神經網絡。與感知網絡相比,它的主要優點在于參數共享和稀疏性連接[5]。卷積神經網絡中的神經元可以對周圍的單元覆蓋區域做出部分響應,表示其覆蓋部分的輸出不受其他像素的影響。許多學者使用CNN模型進行了字符識別,例如,經典的MNIST數字識別[6]。
2 本文模型
本文所實現的車牌識別的模型是CNN,其卷積層用式(1)表示如下:
其中,是卷積核的i行和j列的權重;,是卷積層輸入的行和列。b是偏差;是行和行中的元素卷積層的列。
本文采用的神經網絡主要是卷積神經網絡,網絡模型中的隱層變化與結構中的卷積,中間是隱藏層,以后使用全連接層會在中間采用卷積和歸并的過程對圖像進行分層分類,提取任務的特征最后分類主要使用Softmax層,可以得到當前樣本所屬的不同層分類概率分布。本文卷積神經模型如圖1所示:
3 系統實施
整個系統的實現過程包括圖像去霧、圖像銳化、初始定位車牌的定位,車牌的準確定位,車牌畸形的矯正,字符的識別利用神經網絡進行分割和單字符識別。
3.1 圖像去霧
本文中圖像去霧的主要思想是RGB通道先驗知識[7]。在大多數非天空的地方區域中,某些像素總是至少有一個顏色通道的值非常低。換言之,區域的最小光強度是一個很小的數字,其數學表達式如式(2)所示:
其中J表示彩色圖像中每個通道的公式,以x為中心,以像素為窗口。此公式的目的是找出不同通道上每個位置的最小值,然后在特定窗口中過濾灰度圖像。在計算機視覺中,建立了描述霧圖的模型如式(3)所示:
其中,是現在擁有的圖像(無霧圖像),是無霧圖像的恢復,是所在環境中的光分量,是透射率。公式(3)中,目的是通過已知條件獲得除霧圖。需要找到一個透過率和大氣光的值,從而完成除霧后的圖像。自然條件下車牌除霧效果對比如圖2所示。其中左圖是沒有除霧操作的原始圖像,右圖是除霧后的圖像操作。
3.2 車牌預處理
車牌預處理包括圖像增強、車牌定位、車牌傾斜校正、字符分割等。輸出前一部分的圖像后除霧操作作為車牌預處理的輸入,首先通過圖像添加技術,使圖像銳化,便于后續處理。
3.3 車牌定位
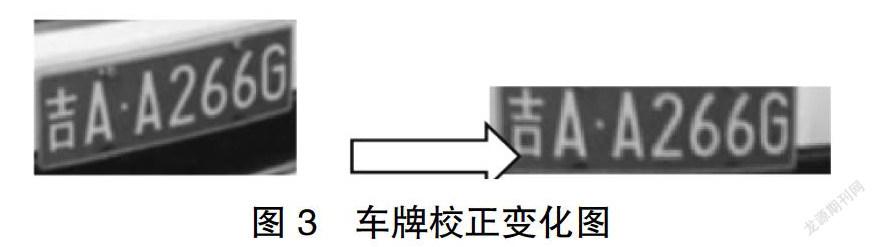
完成上述操作后,需要從等待選擇字段中準確定位車牌對車牌的輪廓區域,判斷預處理后的圖像區域,直接排除該區域小于一定的區域閾值,進一步篩選出符合條件的區域塊。中國車牌是按照一定比例生產的,可根據輪廓的寬高比進一步篩選在準確定位車牌后,由于車牌安裝時間長車牌可能會傾斜,或者攝像頭的拍攝角度等原因問題,這不利于后續的字符分割[8]。因此,字符分割前還應檢查車牌是否傾斜,以糾正其不規則形狀。有各種各樣的車牌校正過程。本文檢測允許的傾斜角為15度,通過仿射變換進行畸形矯正,校正效果如圖3所示。
3.4 車牌字符分割
車牌字符分割是字符識別的關鍵步驟,設計有效的字符分割算法可以有效地提高字符的準確率認可[9]。在車牌字符分割中,主要采用垂直投影的方法分割和模板匹配字符分割。垂直投影分割法在本文中使用。在水平投影的基礎上,去除上邊緣和下邊緣,以及然后對二值化后的車牌圖像進行垂直疊加。由于車牌本身,車牌的某些字符被卡住或斷開。因此垂直投影法在一定條件下需要加以限制。車牌字符的分割效果如圖4所示。
3.5 車牌字符識別
車牌識別的最后一個關鍵步驟是識別,識別的準確率和速度都是非常重要的。在傳統的識別方法中,識別率較低,容易受外界環境因素的影響,導致其精度下降[10]。本文車牌識別采用所設計的CNN模型,泛化能力強,其泛化能力來源于所建網絡模型的最終訓練參數。擁有大量的訓練樣本是獲得良好學習效果的重要途徑之一泛化能力。其次,通過對模型的分析,可以降低模型的損失函數值網絡結構參數的正則化和節點的隨機刪除,以便更好的擬合樣本集分類的結果。
本文利用卷積神經網絡建立了網絡模型如第2節所述,該網絡主要采用Adam算法對損耗函數進行優化,使模型損失函數更適合樣本集。在本文所設計的模型最終的測試識別率可達99%左右,而如SVM其識別率只有80%左右。因而可以說明本文模型的有效性。
4 結論
本文對復雜環境中的車牌識別進行了研究。車牌識別在大霧天氣中,通過提高對天氣現象的認識,大大提高在原有條件下可能無法識別車牌或識別效果較差。在車牌除霧過程中,車牌除霧過程中的RGB通道會被破壞更好的優化,使其更加自然流暢,有利于更好的除霧。在今后的改進中,深度學習法也可以結合到除霧中,這是一種很好的學習方法霧天更有利于提高車牌識別準確率。
參考文獻:
[1]陳政,李良榮,李震,等.基于機器學習的車牌識別技術研究[J].計算機技術與發展,2020,30(6):19-24.
[2]段賓,符祥,江毅,等.結合GAN的輕量級模糊車牌識別算法[J].中國圖象圖形學報,2020(9):1813-1824.
[3]朱鳳霞.基于神經網絡和圖像識別的車牌識別技術[J].電子設計工程,2020,28(2):130-133.
[4]徐偉,張立曉,陳智壽,等.基于Faster-RCNN的鰲江特大橋車輛識別技術[J].物聯網技術,2021,11(1):21-24.
[5]周龍,王偉強,呂科.FACR:一種快速且準確的車輛識別器[J].中國科學院大學學報,2021,38(1):130-136.
[6]高勇.基于BP神經網絡的車牌識別建模及實現[J].電子測試,2021(1):44-45+78.
[7]陳冬英,曾淦雄.基于CNN的車牌識別精定位算法研究[J].福建江夏學院學報,2020,10(6):101-107+115.
[8]曾荻清.視覺無人機高速公路違章識別技術的研究及實現[D].南京郵電大學,2020.
[9]王恒濤.基于TensorFlow、Keras與OpenCV的圖像識別集成系統[J].電子測試,2020(24):53-54+124.
[10]漆世錢.基于輪廓識別和BGR顏色空間的車牌定位[J].計算機技術與發展,2020,30(12):176-180.
