電動汽車電液復合制動系統(tǒng)設計與仿真
2021-09-10 03:10:25姜坤
客聯(lián) 2021年5期
關(guān)鍵詞:控制策略
姜坤


摘 要:針對新能源電動汽車制動系統(tǒng)能耗高、能量回收率低的問題,設計了一種電液復合制動系統(tǒng)。基于并行控制策略的思想,提出了一種匹配的制動系統(tǒng)控制策略。在Car sim中建立整車模型,在MATLAB/Simulink中建立制動系統(tǒng)和控制策略模型,然后建立聯(lián)合仿真模型,分別在NEDC循環(huán)工況和緊急制動工況下進行仿真。仿真結(jié)果表明,所設計的電動汽車電液復合制動系統(tǒng)運行良好,制動系統(tǒng)控制策略滿足要求,能量回收率高。
關(guān)鍵詞:新能源電動汽車;電液復合制動系統(tǒng);控制策略;聯(lián)合仿真
一、引言
分布式驅(qū)動電動汽車是把輪轂驅(qū)動電機或輪邊驅(qū)動電機安裝在車輪里或車輪附近的新能源電動汽車,其主要優(yōu)點包括結(jié)構(gòu)緊湊、傳動效率高、力矩響應快,同時由于動力學控制優(yōu)勢以及能源、環(huán)境污染意識的加強,逐漸成為國內(nèi)外學者研究主流。在極限工況下,電動汽車電液復合穩(wěn)定性控制策略,是可以同時綜合利用電機力矩響應速度快和液壓制動力矩大兩者的優(yōu)點,從而提高車輛穩(wěn)定性能。采用電液復合制動控制策略,當穩(wěn)定性控制器啟用時,優(yōu)先考慮電機制動控制,當電機所能提供的極限制動力矩仍不能滿足需求時,液壓制動系統(tǒng)介入補償控制,參與制動車輪為有效車輪,未能使各個車輪裕度得到充分利用,從而使得車輛穩(wěn)定性能的提高還留有一定空間。在穩(wěn)定性控制時綜合考慮車輪驅(qū)動防滑,由驅(qū)動防滑模塊和穩(wěn)定性控制模塊共同決定整車的縱向驅(qū)動力,同時在四輪控制力分配時綜合考慮輪胎附著橢圓約束。相關(guān)資料提出一種分層復合制動控制策略,上層以穩(wěn)定性跟隨為控制目標,下層以制動能量回收最大為目標,此策略主要以節(jié)能為控制目標,而安全性能未獲得明顯改善。
綜上所述,目前國內(nèi)外學者對穩(wěn)定性控制策略大多只是對電液復合制動進行大量研究,而較少考慮依據(jù)電機驅(qū)動力矩來調(diào)節(jié)車輛穩(wěn)定性能,同時在電液復合穩(wěn)定性控制算法中制動液壓制動力部分只是進行了簡單的單一有效輪或單側(cè)靜載荷比例分配進行制動力分配,并未使車輛在極限工況下的穩(wěn)定性能得到最大幅度提高,因此,本文設計了一種電液復合雙重優(yōu)化穩(wěn)定性控制器,旨在極限工況下最大幅度提高車輛的穩(wěn)定性能。
二、電液復合制動系統(tǒng)方案設計
目前新能源電動汽車一般采用高壓蓄能器、電動真空泵、電動真空罐等作為液壓制動力來源,但存在耗能大、回收效率低、難以實現(xiàn)制動踏板與制動力解耦等缺點。本文設計的電液復合制動系統(tǒng)選擇電機作為液壓制動力來源,利用電機的旋轉(zhuǎn)力來為踏板力助力,通過現(xiàn)有成熟的踏板力模擬器來實現(xiàn)踏板力與制動力解耦,并且能夠保證駕駛員良好的制動反饋感覺。
1.電液復合制動系統(tǒng)組成
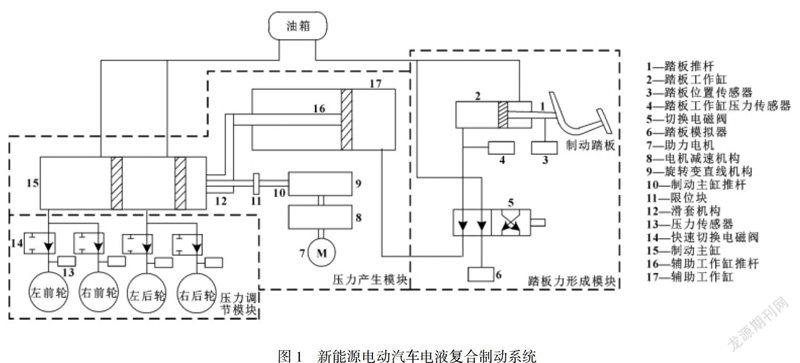
如圖1所示,整個制動系統(tǒng)主要由踏板力形成模塊、壓力產(chǎn)生模塊和壓力調(diào)節(jié)模塊組成。
踏板力形成模塊中踏板位置傳感器、踏板工作缸壓力傳感器負責收集踏板開度信息和制動需求信息,踏板模擬器負責為駕駛?cè)朔答佒苿痈惺堋V苿酉到y(tǒng)失效時,踏板力形成模塊還負責將踏板力引入到壓力產(chǎn)生模塊中,實現(xiàn)人力制動,保證制動安全。壓力產(chǎn)生模塊根據(jù)接收到的制動壓力信號,通過助力電機及其他機構(gòu),在制動主缸內(nèi)生成相應的制動壓力,實現(xiàn)踏板力與制動力的解耦。壓力調(diào)節(jié)模塊主要負責將主缸中傳遞的制動壓力分配給4個輪缸,并通過切換電磁閥在緊急制動時調(diào)節(jié)各輪缸壓力。
2.整車穩(wěn)定性控制系統(tǒng)
上層為運動控制層,根據(jù)駕駛員輸入、車輛運動姿態(tài)以及路面條件等計算出維持電動汽車穩(wěn)定行駛的附加橫擺力矩和車速跟隨縱向力;層控制器包括電液復合決策模塊和控制力分配層,其中電液復合決策模塊主要依據(jù)上層控制器得到的附加橫擺力矩實時判斷電機控制是否能單獨保證車輛穩(wěn)定性能,必要時啟用液壓制動系統(tǒng),而控制力分配層主要對電機/液壓系統(tǒng)力矩以整車裕度最大為目標進行優(yōu)化分配。
3.電液復合制動系統(tǒng)工作過程
本文設計的電液復合制動系統(tǒng)常規(guī)制動模式共有3種,即機械液壓制動模式、再生制動模式和電液復合制動模式。此外,為了保證制動安全與制動系統(tǒng)的可靠性,設計了ABS緊急制動模式和備份制動模式。當系統(tǒng)處于常規(guī)制動模式時,切換電磁閥通電并處于右位,此時駕駛員踩下制動踏板,踏板力形成模塊獲得制動需求信息并傳送至整車控制器內(nèi),控制器進行制動模式判斷。當判斷為機械液壓制動模式時,由助力電機單獨提供機械液壓制動力;當判斷為再生制動模式時,由驅(qū)動電機單獨提供再生制動力;當判斷為電液復合制動模式時,汽車制動力由機械液壓制動力和再生制動力共同提供。當系統(tǒng)處于ABS緊急制動模式時,通過快速電磁閥的不斷開閉動作和助力電機增減作用力相配合,防止各個車輪進入抱死拖滑的危險狀態(tài)。當電機、減速機構(gòu)、旋轉(zhuǎn)變直線機構(gòu)、制動主缸推桿等機構(gòu)失效時,進入備份制動模式,切換電磁閥斷電并處于左位,踏板工作缸作用于輔助工作缸,輔助工作缸推動制動主缸從而產(chǎn)生制動壓力,此時汽車制動力由人力提供,保證制動安全。
4.轉(zhuǎn)向系統(tǒng)峰值
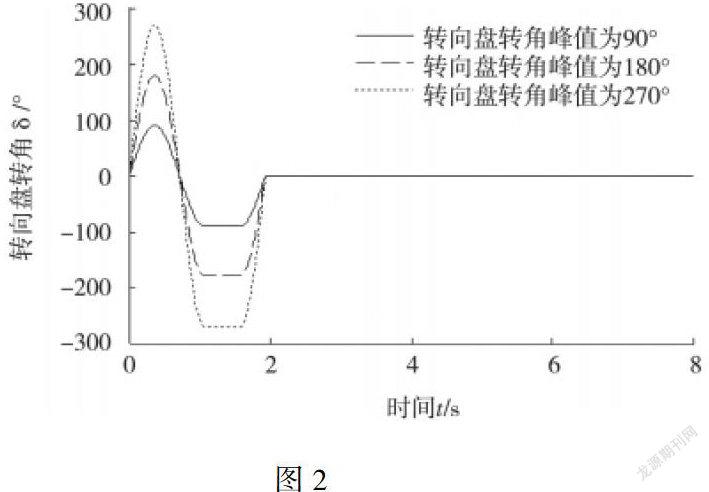
轉(zhuǎn)向盤轉(zhuǎn)角峰值為90°試驗一車輛以80km/h速度行駛的新能源汽車,在附著系數(shù)為0.9的路面上,以0.7Hz的頻率進行轉(zhuǎn)向盤正弦輸入其正向峰值達到90°,反向轉(zhuǎn)向盤轉(zhuǎn)角在波谷處轉(zhuǎn)向盤轉(zhuǎn)角保持500ms后進行回正。圖2為轉(zhuǎn)向盤峰值為90°時的試驗結(jié)果。圖3(a)中,在轉(zhuǎn)向盤轉(zhuǎn)角峰值為90°正弦延遲常規(guī)工況下,電液復合控制、純電控制、無控制車輛橫擺角速度與理想橫擺角速度跟隨誤差始終保持較小范圍;圖3(b)中,不同控制下車輛質(zhì)心側(cè)偏角相平面圖是收斂的,車輛處于安全可控區(qū)域;圖3(c)中,制動壓力主要集中在0~1s和2s左右,對比可知,此時轉(zhuǎn)向盤轉(zhuǎn)角發(fā)生劇烈變化,電液復合控制車輛液壓制動系統(tǒng)及時介入,使車輛最早進入穩(wěn)態(tài);綜合圖2發(fā)現(xiàn),在轉(zhuǎn)向盤轉(zhuǎn)角峰值為90°正弦延遲工況下,3種不同控制車輛穩(wěn)定性能均滿足GB/T30677-2014法規(guī)要求,而且仔細觀察可知,電液復合控制、純電控制車輛,在轉(zhuǎn)向盤轉(zhuǎn)角輸入結(jié)束后,其橫擺角速度超調(diào)量相對較小且回到穩(wěn)態(tài)時間更短,質(zhì)心側(cè)偏角收斂在較小區(qū)域內(nèi),控制效果較佳。
5.轉(zhuǎn)向盤轉(zhuǎn)角峰值為90°
試驗一車輛以80km/h速度,在附著系數(shù)為0.9的路面上,以0.7Hz的頻率進行轉(zhuǎn)向盤正弦輸入其正向峰值達到90°,反向轉(zhuǎn)向盤轉(zhuǎn)角在波谷處轉(zhuǎn)向盤轉(zhuǎn)角保持500ms后進行回正。圖5為轉(zhuǎn)向盤峰值為90°時的試驗結(jié)果。圖5(a)中,在轉(zhuǎn)向盤轉(zhuǎn)角峰值為90°正弦延遲常規(guī)工況下,電液復合控制、純電控制、無控制車輛橫擺角速度與理想橫擺角速度跟隨誤差始終保持較小范圍;圖5(b)中,不同控制下車輛質(zhì)心側(cè)偏角相平面圖是收斂的,車輛處于安全可控區(qū)域;圖5(c)中,制動壓力主要集中在0~1s和2s左右,對比圖4可知,此時轉(zhuǎn)向盤轉(zhuǎn)角發(fā)生劇烈變化,電液復合控制車輛液壓制動系統(tǒng)及時介入,使車輛最早進入穩(wěn)態(tài);綜合圖5發(fā)現(xiàn),在轉(zhuǎn)向盤轉(zhuǎn)角峰值為90°正弦延遲工況下,3種不同控制車輛穩(wěn)定性能均滿足GB/T30677-2014法規(guī)要求,而且仔細觀察可知,電液復合控制、純電控制車輛,在轉(zhuǎn)向盤轉(zhuǎn)角輸入結(jié)束后,其橫擺角速度超調(diào)量相對較小且回到穩(wěn)態(tài)時間更短,質(zhì)心側(cè)偏角收斂在較小區(qū)域內(nèi),控制效果較佳。
6.電液復合控制策略
電液復合控制模塊將路面附著系數(shù)μ,車輪轉(zhuǎn)速n、附加橫擺力矩Mz與當前車速下電機所能提供的最大橫擺力矩Mm-max作比較,實時判定液壓制動系統(tǒng)是否介入。由于電機響應速度快,具有控制及時的優(yōu)點,故常規(guī)工況,附加橫擺力矩小于當前車速下電機所能提供的最大力矩,采用純電控制策略。在極限工況下,輪轂電機轉(zhuǎn)矩控制達到當前車速下最大驅(qū)動/制動力仍無法滿足車輛穩(wěn)定行駛,此時采用電液復合控制
三、電液復合制動系統(tǒng)制動力分配控制策略
現(xiàn)有的電動汽車制動力控制策略主要有3種,分別為最佳制動效果控制策略、最優(yōu)能量回收控制策略以及并行制動控制策略。并行制動控制策略是只在前軸加入再生制動力來滿足總體的制動力分配要求,應用成本較低,穩(wěn)定性與安全性都有所保證。本文以并行制動控制策略為設計思想,分配電液復合制動系統(tǒng)制動力,如圖4所示,具體控制策略為:(1)駕駛員踩下制動踏板發(fā)出制動指令,傳感器會收集當前的行駛車速與制動踏板信號傳送給整車控制器,作為判斷駕駛員制動意圖的重要信息。(2)信號經(jīng)過計算得到制動強度z,并由此將制動強度分為高強度、中強度和低強度3種,分別對應不同的工作模式。(3)考慮到緊急制動時所需制動強度較大,僅憑借電機再生制動無法滿足,為保證制動安全性,在緊急制動時使電機再生制動全部退出。根據(jù)道路實測情況,將z=0.7定為電液復合制動與ABS制動模式切換判斷點。當z>0.7時,控制策略判定為高強度制動,汽車直接進入包括ABS緊急制動在內(nèi)的純機械液壓制動模式;當z<0.7時,控制策略監(jiān)測電池SOC值進行電池保護策略判斷。為防止電池因過充電而造成的壽命縮減,該策略設定SOC值在0.8以上時,汽車不進行再生制動來回收能量,同樣進入純機械液壓制動模式;SOC值低于0.8時,制動系統(tǒng)控制策略會判定當前制動為中低強度制動。
(4)根據(jù)ECE法規(guī),當汽車制動強度大于0.1時,前、后軸都必須有制動力來參與制動。該策略把z=0.1定為電機再生制動與電液復合制動模式切換判斷點。當z<0.1時,進入再生制動模式,前輪制動力由電機再生制動單獨提供,后輪僅在即將停車或駐車時參與制動。當z在0.1~0.7之間時,基于并行控制策略的思想,后輪進行機械液壓制動,微控制單元則計算出前輪所需的制動力,若再生制動力能滿足前輪制動力要求,前輪就進行單獨的再生制動;如果再生制動力不能滿足前輪制動力要求,機械液壓制動系統(tǒng)進行補足,前輪液壓制動系統(tǒng)與再生制動系統(tǒng)共同工作,汽車進入電液復合制動模式。
四、仿真模型搭建
基于Carsim與MATLAB/Simulink軟件,本文搭建了電液復合制動系統(tǒng)的聯(lián)合仿真模型,如圖4所示,包含了整車、電機、電池、變速器、駕駛員、微控制單元(MCU)以及制動力控制策略模型。其中,整車模型為驗證制動系統(tǒng)性能的載體,在Carsim中建立;其他與制動性能密切相關(guān)的模型在MATLAB/Simulink中建立。駕駛員模型按照指定的工況發(fā)出駕駛指令,駕駛指令經(jīng)MCU處理,分別向電機模型發(fā)出驅(qū)動扭矩與制動扭矩信號,向制動系統(tǒng)發(fā)出制動壓力信號。當電機作為電動機驅(qū)動時,電機模型接收指令后向變速器模型發(fā)出輸出功率信號,同時與電池模型相連的接口消耗電池存儲的電量;當電機作為發(fā)電機制動時,電機的制動扭矩會輸入到電池模型中,電池模型中的阻容模型會根據(jù)輸入的制動扭矩進行換算,將它轉(zhuǎn)換為電量存儲起來。變速器模型接收到電機傳遞的功率后進行換擋邏輯的識別并最終輸入到整車模型。制動系統(tǒng)同樣在接收到制動壓力指令后進行制動模式的判斷與制動壓力的分配,并輸入到整車模型中。
五、NEDC循環(huán)工況仿真分析
1.行駛車速
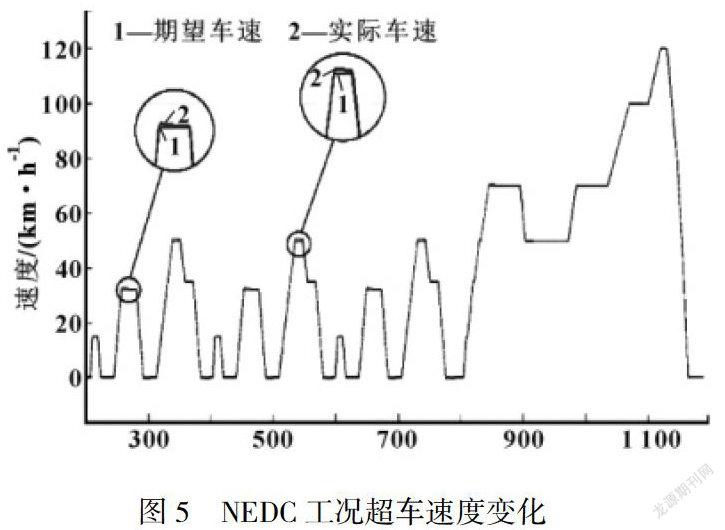
圖5為整車速度變化曲線。可知:整車實際車速基本上跟蹤了預定的期望車速,最大速度差值為3.8km/h,最小速度差值為0,說明所建立的駕駛員模型可以按照指定的路徑發(fā)出相應的駕駛指令,并且電機、變速器、車速調(diào)控環(huán)節(jié)等模型工作正常。
2.制動主缸與制動輪缸壓力
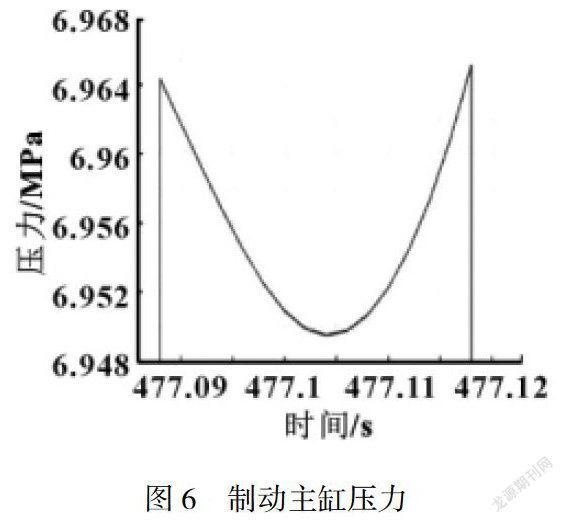
圖6為制動主缸壓力曲線,此時汽車處于NEDC循環(huán)中的停車階段,駕駛員模型被設置為發(fā)出最大強度的制動強度,而ABS系統(tǒng)退出值設置為3km/h,所以此時ABS系統(tǒng)沒有介入,制動壓力最大且不出現(xiàn)快速波動。可知:制動主缸的最大壓力峰值大約為6.96MPa,能滿足地面制動力達到最大時所需的液壓缸壓力,前輪制動輪缸峰值壓力為2.90MPa,后輪制動輪缸峰值壓力為1.75MPa,由此可知前、后輪制動器制動力的比值基本符合良好路面條件下的理想制動力分配曲線,制動力分配策略工作正常。
3.電池模型
電池選擇阻容模型進行建模,將電池組轉(zhuǎn)換為由電容與電阻組合起來的2階等效電路模型。在阻容模型等效電路中,SOC值計算公式為SOC=SOC1-KT(Q1/Q2)(3)式中:SOC1為電動汽車初始SOC值;KT為溫度補償系數(shù);Q1為電池的當前已使用電量;Q2為電池的總電量。由于電動汽車實際運行工況下溫度無法精準預測,故忽略溫度影響,令溫度補償系數(shù)KT為定值1,
六、結(jié)束語
本文設計的新能源電動汽車電液復合制動系統(tǒng)方案及制動力控制策略為研究者們提供了一些新的思路,通過軟件對整車、駕駛員、MCU、電機、電池、變速器以及制動力控制策略等進行建模并選擇NEDC和緊急制動工況進行仿真,通過監(jiān)測整車行駛車速、制動主缸與制動輪缸壓力、制動跑偏值、電池SOC值、滑移率等幾項指標,驗證了該電液復合制動系統(tǒng)能夠保證制動安全性,制動力分配策略符合要求,且在文中設定工況下能夠回收37.5%的能量。本文在以安全性為首要目標的情況下,建立制動系統(tǒng)時選擇了較為簡單可靠的方案,例如在緊急制動時,為保證制動安全,電機沒有進行再生制動,若想要回收這一部分的制動能量必須對原來的ABS控制系統(tǒng)等進行適當修改,因此進一步提高能量回收率將是未來的研究方向。
參考文獻:
[1]徐薇.四輪輪轂電動汽車制動能效性滾動優(yōu)化控制研究[D].吉林大學,2020.
[2]施雁云.純電動汽車電液復合再生制動控制策略研究[D].江蘇大學,2020.
[3]楊陽,陳晶,羅倡,湯清淞.基于系統(tǒng)效率優(yōu)化的電液復合制動協(xié)調(diào)控制[J].長安大學學報(自然科學版),2020,40(03):117-126.
[4]武蘇杭.基于路面類型識別的復合制動控制策略研究[D].燕山大學,2020.
[5]楊勇超,程振東,陳志杰.電液復合制動系統(tǒng)IEHB液壓力控制算法研究[J].電子技術(shù),2020,49(03):56-57.
[6]牛禮民,周亞洲,楊洪源.基于Agent的電液復合制動系統(tǒng)防抱死控制研究[J].中國機械工程,2017,28(13):1567-1573.
[7]劉文超.分布式電動汽車復合制動系統(tǒng)控制策略的研究[D].吉林大學,2017.
[8]王凱祺.電液復合制動系統(tǒng)EHB控制策略開發(fā)與測試[D].吉林大學,2017.
[9]潘寧,于良耀,張雷,宋健,張永輝.電液復合制動系統(tǒng)防抱控制的舒適性[J].浙江大學學報(工學版),2017,51(01):9-16+26.
猜你喜歡
艦船科學技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
