基于非接觸滯環調節器和動態基準調節的自激閉環控制策略
2021-08-11 13:28:56徐立剛柯光潔陳乾宏任小永張之梁
電力系統自動化 2021年15期
關鍵詞:信號
徐立剛,柯光潔,陳乾宏,任小永,張之梁
(南京航空航天大學自動化學院,江蘇省南京市 211106)
0 引言
感應式電能傳輸(inductive power transfer,IPT)技術具有安全、可靠、便捷以及較強的環境適應性等優點,在消費電子、智能家居、電動汽車、植入式醫療設備以及水下、礦井等場合有良好的應用前景[1-4]。實際應用中,IPT系統中耦合機構的原副邊完全分離,錯位、間隙變化不可避免,由此引起互感、耦合系數等參數的變化。考慮到耦合機構及用電負載的穩態及動態參數的變化,IPT系統需要有可靠、快速的控制方法,適應耦合系數的大范圍變化(通常為0.1~0.3)和負載的突變,以獲得穩定輸出,并具備良好的動態特性。
研究人員提出了不同的控制方案,包括級聯DC/DC變換器,應用調寬、移相、脈沖密度調制、On/Off控制[5-12]以及動態調諧[13-14]等,來改善IPT系統的動靜態特性。例如,在原邊側級聯Buck變換器來調節逆變器的輸入電壓[5],基于參數估計,改變逆變橋兩橋臂的移相角來調節輸出[6]。受限于非接觸反饋單元或者動態參數估計方法的響應速度,上述原邊側控制方法的負載動態響應速度較慢。為此,文獻[10-11]分別采用后級Boost變換器、脈寬調制(PWM)整流器實現輸出穩壓。加入后級變換器會增加移動側的體積和重量,而PWM整流器的引入又會改變等效負載阻抗特性,帶來失諧問題。
為了降低控制器設計的復雜度,簡化電路結構,研究人員利用非接觸諧振變換器固有的增益交點實現恒壓或恒流輸出[15-16],并提出了多種非接觸自激控制策略。文獻[17]針對并/串補償網絡,利用原邊并聯電容兩端電壓產生同相的自激驅動信號,實現恒壓輸出;類似的,文獻[18]針對串/串補償網絡,利用原邊電流產生同相的自激驅動信號,獲得了與負載變化無關的恒流輸出,但二者的輸出增益均與耦合系數相關。為了適應變耦合工況,文獻[18]在自激控制回路中引入分頻控制,利用非接觸反饋構成閉環,使得自激間歇工作,實現對輸出電流的調節。為了實現變負載、變氣隙、錯位條件下輸出基本恒定,文獻[19]提出了另一種自激控制思路:檢測串/串補償拓撲副邊電流的過零點,產生原邊開關管的驅動信號,使得系統能自動追蹤與負載和耦合系數均無關的固定增益頻率。在此基礎上,文獻[20]將相位檢測線圈與原邊功率線圈進行了集成,提出了三線圈結構的自激式串/串補償諧振變換器,以提高功率密度。但文獻[19-20]所提的自激控制只能保證輸出電壓的基本穩定,其輸出本質上還是開環控制。實際輸出電壓因負載變化、線路寄生電阻以及電流相位檢測誤差等原因,波動較大。
為此,本文針對三線圈結構串/串補償自激控制系統,引入動態基準作為調節變量,以滿足輸出精確控制要求。首先,介紹了基于動態基準調節的自激控制概念,說明了輸出電壓調節機理,在此基礎上,建立控制系統的開環傳遞函數模型,分析基準電壓取值對自激工作頻率與輸出電壓的影響,給出最大調控電壓、基準電壓等關鍵參數的設計依據。進一步,提出了檢測便捷、延遲時間小的輸出過/欠壓狀態信息反饋技術,并給出了自激式輸出電壓精確控制策略的具體實現方法。最后,設計并搭建了一臺80 W實驗樣機證明了本文所提控制策略的有效性。
1 基于動態基準調節的自激控制策略
1.1 新型自激控制策略的提出
圖1(a)給出了本文所提基于動態基準調節的自激式串/串補償IPT系統的結構框圖,其中:Vin、Vo分別為直流輸入、輸出電壓;vgs為驅動電壓,圖中以0-1量表示;vAB為逆變器輸出交流方波電壓,圖中以0-1量表示;L1、L2和L3分別為 原、副邊功 率繞組與短路繞組的自感;M12、M13和M23為三繞組之間的互感,對 應的耦 合系數分別為k12、k13和k23;i1、i2和i3分別為 流過L1、L2和L3的 電流;C1、C2分別為 原、副邊串聯補償電容;r1、r2和r3為回路寄生電阻;RL為負載電阻;v3為電流采樣電路輸出;Vcomp為動態基準電壓。
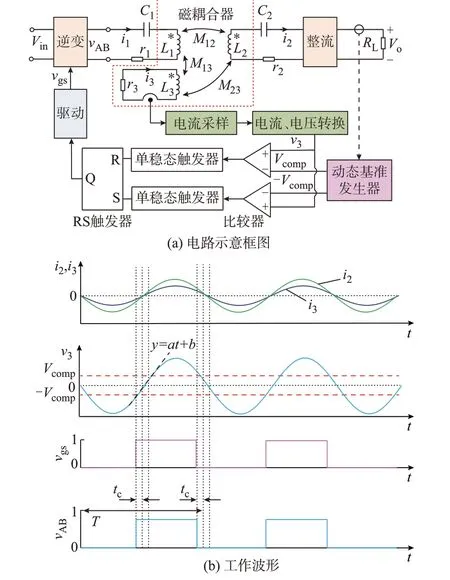
圖1 基于動態基準調節的自激控制策略Fig.1 Self-oscillating control strategy based on dynamic reference modulation
自激控制工作過程為:副邊繞組電流i2經磁場耦合使得短路繞組流過同相位的電流i3,i3經電流、電壓轉換得到v3;將v3與動態基準電壓Vcomp進行比較,經過波形處理后轉換為占空比為0.5的方波,驅動逆變器的開關管,從而維持變換器的自激工作。相關波形如圖1(b)所示。與現有的自激控制策略[19]相比,本文所提控制策略引入動態基準,提供了一個新的可調節變量Vcomp,在保留自激控制良好動態性能的同時,可實現對系統輸出的精確調控。
定義引入動態基準后,vAB與i2之間的相移時間為tc,對應的轉移阻抗角為θ。假設逆變器的工作周期為T,采樣輸出v3波形在過零點處的斜率為a,由圖1(b)可推導得到Vcomp與tc、θ之間的函數關系為:
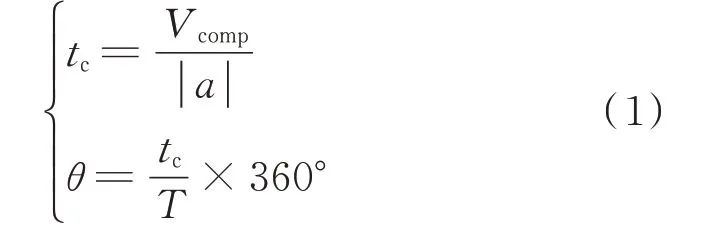
顯然,動態調節Vcomp的數值,即可調控vAB與i2的相位差。
1.2 輸出電壓調節機理
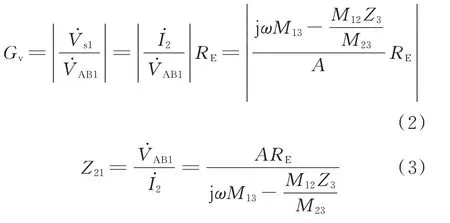
對圖1所示功率變換器采用基波近似分析方法,得到附錄A圖A1所示基波等效電路。基于變壓器互感模型與基爾霍夫電壓定律(KVL),可以求得變換器的輸出電壓增益Gv以及轉移阻抗Z21[20],具體表達式如下:
結合附錄A圖A2(a)不難看出,在ZVS頻率區間內,轉移阻抗角θ隨工作頻率單調變化,反之,調節θ,自激穩定振蕩頻率也會隨之變化,而工作頻率的改變又會影響輸出電壓增益,如圖A2(b)所示。因此,通過引入動態基準,調節θ,控制自激工作頻率,可實現對輸出電壓的調控。但需要注意的是,輸出電壓增益隨工作頻率的變化是非單調的,這使得Gv存在極大值點,限制了IPT系統可調輸出電壓的上限。另外,也限制了頻率調節范圍,只有設計調節頻率在最右側峰值點的右半部分,如圖A2(b)中陰影部分所示,使得Gv隨頻率始終單調變化,才能實現輸出的負反饋調節。
具體的電壓調節過程如圖2所示。在耦合機構與負載參數發生變化時,自激響應能夠使得系統快速追蹤到增益交點頻率(ωH)附近,同時動態基準可實現對輸出電壓的負反饋調節:檢測到輸出電壓升高(減小)時,控制動態基準電壓Vcomp增大(減小),轉移阻抗角增大(減小),以提高(降低)自激工作頻率,減小(增大)輸出電壓,從而維持輸出電壓的穩定。

圖2 基于動態基準調節的自激控制輸出電壓調節過程Fig.2 Output voltage regulation process of selfoscillating control based on dynamic reference modulation
2 關鍵參數設計依據
第1章介紹了基于動態基準調節的自激控制理論以及輸出電壓調節機理,在此基礎上,本章建立控制系統的開環傳遞函數模型,分析基準電壓取值對自激工作頻率與輸出電壓的影響,由此給出最大調控電壓、基準電壓等關鍵參數的設計依據。
2.1 控制系統傳遞函數


GCS為電流采樣電路的傳遞函數,可等效成一個比例K0,GCS=K0。GPWM為驅動信號產生過程的傳遞函數,根據圖1(b),可將其等效為一個相位超前調節環節:

式中:tx為等效相移時間,包括動態基準引入的可控相移時間tc和實際控制回路中存在的固有器件延時t0,tx=tc?t0。
GAC為驅動信號vgs到逆變橋輸出電壓vAB的傳遞函數,其表達式為:

式中:K1為功率放大系數;Ts為開關器件延遲時間。
自激控制環路的傳遞函數Gid為:

式中:td為vAB相對于短路繞組電流i3的總相移時間,td=tc?t0?Ts。由于傳遞函數Gid的輸入、輸出信號均為vAB,因此其虛、實部Im(Gid)、Re(Gid)滿足Re(Gid)=1>0且Im(Gid)=0。
令Im(Gid)=0,可以得到系統自激振蕩頻率ωD與相移時間td的隱式表達式F(ωD,td),忽略k13與寄生電阻,F(ωD,td)的表達式如式(8)所示。
進一步,結合Re(Gid)>0可以解得實際的自激振蕩頻率ωD:

將ωD代入式(2),即可求得系統輸出電壓增益關于相移時間td的開環傳輸函數Gv,con為:

由式(1)可求得動態基準電壓Vcomp與總相移時間td的關系式為:

將式(11)代入式(8)、式(10),即可得到ωD、輸出電壓增益關于動態基準電壓Vcomp的函數表達式。考慮到式(11)中a、t0、Ts均為可變量,參數不確定,為了減少分析的變量數,在下文的討論中選用相移時間td來描述動態基準電壓Vcomp的影響。
2.2 動態基準對工作頻率與輸出電壓增益的影響
式(8)、式(10)的解析式不易得出,但可以應用Mathcad或MATLAB數學分析軟件進行數值求解。代入附錄A表A1中的參數,計算得到不同耦合系數與負載電阻下,系統自激振蕩頻率ωD與穩態輸出電壓增益Gv,con隨相移時間td變化的曲線分別如附錄A圖A4(a)和(b)所示,其中td>0表示vAB超前于i3,td<0表示vAB滯后于i3。
可見,引入動態基準后,實際自激工作頻率ωD會相對理想自激振蕩頻率ωHi(i=1,2,3,分別對應三檔耦合系數)發生偏移,且隨著相移時間td單調遞增。那么,控制基準電壓增大,也即增大td,提高工作頻率,與圖2中的控制邏輯相符。
附錄A圖A4(b)給出了系統輸出電壓增益Gv,con與td的函數曲線,顯然,動態基準(相移時間td)對IPT系統的輸出電壓具有調節作用,但它也存在局限性:①輸出電壓不能任意調節,在每組(RE,k12)下,Gv,con均存在極大值點,故動態基準所能調控的最大輸出電壓是有界的;②相移時間參數不能隨意選取,為保證輸出負反饋,相移時間調節區間應設置在Gv,con單調變化區間。
2.3 輸出電壓限值
記Gv,con極 值 處 的 相 移 時 間 為tdp,增 益 極 值 為Gv,conp,則對于任意一組(RE,k12)參數,均存在一組(tdp,Gv,conp)與之對應,相應地,系統所能調控的輸出電壓范圍為0~Gv,conp。為了在全部負載、耦合系數變化范圍內均能實現恒定電壓輸出,所設計的IPT系統的額定輸出電壓Vo應不大于min{Gv,conp},其中min{?}表示返回最小值。
令?Gv,con/?td=0,解得tdp,代入式(10)即可求得Gv,conp的函數曲線,如附錄A圖A5(a)所示,其中Q為線圈品質因數(Q=(ωDLi)/ri,i=1,2,3)。由圖A5(a)可見,Gv,conp隨負載電阻單調遞增,隨耦合系數單調遞減,其最小值min{Gv,conp}在最大耦合系數、最小負載電阻處取得。因此,應設計額定輸出電壓Vo滿足式(12)。

2.4 動態基準調節區間設計
假 設 可 控 相 移 時 間 范 圍 為td,min~td,max。為 了 在全部參數變化范圍內均能實現對輸出電壓的負反饋調節,應設計td,max≤min{tdp}或者td,min≥max{tdp},其中max{?}分別表示返回最大值。
繪制不同k12下,tdp隨負載變化的曲線,如附錄A圖A5(b)所示。由該圖可以看到,在RE與k12變化范圍內,tdp存在最大值,且發生在最小負載與最大耦合系數工況。令k12=1,RE=0Ω,求得此時tdp≈0,故max{tdp}始終小于等于0。那么設置td,min≥0,即使得vAB超前于短路繞組電流i3,就可以保證輸出電壓增益隨相移時間單調變化。
3 自激式輸出電壓閉環控制電路設計
應用動態基準控制理論實現輸出電壓閉環調節,還需要輸出電壓反饋,因為需要依據輸出電壓動態調節比較Vcomp的數值。常規紅外、藍牙、Wi-Fi、Zigbee等無線通信方式握手時間較長、存在延遲,快速性不好,且輸出電壓反饋需要模數、數模轉換等多個環節,實現復雜[11]。為此,本文提出了基于過/欠壓狀態信息反饋的非接觸滯環調節器,依據輸出過/欠壓狀態調節Vcomp,從而將輸出模擬信號的非接觸反饋需求轉化為簡單的數字電平信號反饋需求,實現簡單,傳輸延遲小。圖3給出了閉環控制電路的原理框圖,包括信號反饋電路、電流相位檢測電路、動態基準調節電路與驅動信號產生電路這4個部分,所有電路均由模擬電路搭建,具有良好的實時性。圖3中:LPF表示低通濾波,BPF表示帶通濾波。
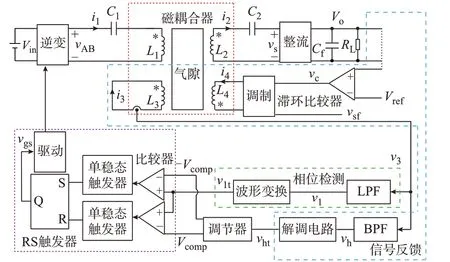
圖3 自激式輸出電壓閉環控制電路原理框圖Fig.3 Block diagram of self-oscillating closed-loop control circuit of output voltage
3.1 輸出過/欠壓狀態信號反饋電路
如圖3所示,信號傳輸采用磁耦合反饋方式,在耦合機構的副邊增加繞組L4,用于數字信號發射,并復用短路繞組L3接收數字信號。數據傳輸過程為:采樣直流輸出電壓Vo,并將其與輸出基準電壓Vref作滯環比較,輸出表征輸出過壓、欠壓狀態的高、低電平,分別對應數字“1”和“0”;然后,利用載波振幅鍵控(amplitude shift keying,ASK)調制原理,將數據信號調制到高頻載波上,通過松耦合繞組L4、L3實現無線傳輸;原邊檢測電路采樣流過短路繞組L3的電流,并將攜帶數字信息的高頻載波提取出來,再經過解調電路,從而將副邊輸出狀態信息恢復出來。具體的電路實現及關鍵電壓、電流波形如附錄A圖A6所示。為避免混淆,記功率傳輸頻率為fd,高頻載波頻率為fe。
附錄A圖A6(a)中,L4、r4為信號發射繞組的自感、寄生電阻,Cf1為諧振電容,與L4在載波頻率fe處諧振,Rf1為限流電阻。vsf是高頻載波,vc為待傳輸的數字信號,vc控制與L4并聯的雙向開關S,對載波信號進行調制。如圖A6(b)所示,vc為低電平時,S斷開,vsc激勵Cf1、Rf1、L4、r4串聯諧振回路,在L4中流過高頻諧振電流,vc為高電平時,S導通,將繞組L4短路,電流為零,故流過L4的電流i4被調制為:
式中:Vsf為vsf的基波有效值。
由于共用磁場耦合通道,L3感應出同時包含能量和數據的信號,如附錄A圖A6(b)所示。原邊信號接收電路中,高頻帶通濾波器用于提取攜帶副邊狀態信息的載波頻率信號vh,包絡檢波器提取信號包絡,低通濾波器濾除包絡中的高頻噪聲,放大器用于放大低通濾波器輸出信號的幅值,比較器用于判斷傳輸信號的高、低電平,將輸出電壓的狀態信息還原,完成數據通信。最終,比較器輸出電壓vht>0,表示輸出欠壓;vht<0,表示輸出過壓。
這里雖然能量傳輸與數據傳輸共用耦合機構,線圈間存在交叉耦合,但由于各自諧振網絡的諧振頻率差異,二者之間的相互干擾很弱。通常,為了保證信號的傳輸速率,往往設計載波頻率為能量傳輸頻率的10倍及以上,達到兆赫茲級[21]。設計Cf1與L4在載波頻率fe處諧振,即等效構成一個帶通濾波器,一方面可有效阻止能量信號進入數據傳輸回路,減小對數據傳輸的干擾;另一方面,諧振還可以減小數據回路的阻抗,增大數據信號的幅值,保證數據傳輸的有效性。反過來,功率回路諧振網絡的選頻放大作用也會使得耦合到能量回路中兆赫茲載波信號強度急劇衰減。因此,輸出過/欠壓狀態信號反饋電路具有較強的抗干擾性。
3.2 自激式非接觸滯環調節電路
附錄A圖A7(a)和(b)給出了電流相位檢測電路與動態基準調節電路的原理圖及相關的波形示意圖。
忽略k13[20],基于互感理論,求得短路電流為:

式中:k34為繞組L3和L4之間的耦合系數。可以看到,i3的能量信號與副邊功率繞組電流i2同相。故濾除i3中的載波頻率信號,即可獲取副邊能量接收線圈電流相位信息。
如附錄A圖A7(a)所示,電流相位檢測電路采樣短路繞組電流i3,經RC低通濾波,得到滯后于副邊功率繞組電流i290°相位的正弦信號vl,并經運算放大器對vl的幅值進行放大。考慮到正弦波形的非線性,直接將其與動態基準電壓Vcomp比較,難以建立Vcomp與相移時間tc間精確的函數關系,故本文采用過零比較器與積分電路將正弦波轉換為三角波vlt,vlt峰值電壓為:

式中:Vl2,p為過零比較器輸出電壓vl2的峰值電壓;R11和C11分別為調節比例-積分(PI)控制器的電阻和電容。由附錄A圖A7(b)可以看到,三角波vlt與副邊功率繞組電流同相,實現了對副邊功率繞組電流相位的檢測。
動態基準調節電路根據反饋得到的輸出電壓過/欠壓狀態信息,通過積分調節器調節動態基準電壓Vcomp。如附錄A圖A7所示,輸出過壓時,反饋低電平信號,Vcomp增大;輸出欠壓時,反饋高電平信號,Vcomp減小,與圖2所示的控制邏輯相符。圖A7(a)中限幅電路用來調整Vcomp的調節區間,反相器輸出?Vcomp。
進一步,將電流相位檢測信號vlt分別與動態基準調節電路的輸出電壓Vcomp、?Vcomp交截,可得到逆變器的驅動信號,電路實現如圖3中的紫色虛線框所示,比較器輸出經單穩態觸發器后輸出邊沿信號,再用RS觸發器還原成方波信號vgs。由附錄A圖A7(b)可以看到,引入動態基準后,驅動信號超前副邊繞組電流的時間為tc,且隨著Vcomp增大,相移時間tc增大,轉移阻抗角增大,結合圖2可知,相應的自激工作頻率會提高,使得輸出電壓減小,進而實現對輸出電壓的負反饋調節。
需要注意的是,考慮到驅動信號vgs是由三角波vlt與Vcomp、?Vcomp交截得到,為了獲得驅動信號,對三角波的幅值提出了要求,即
式中:|Vcomp|max、ωD,max分別為|Vcomp|、ωD所能取 得的最大值。
結合式(15)與式(11),可以求得相移時間td與動態基準電壓Vcomp間的函數關系為:

3.3 集成電流相位檢測與輸出反饋功能的耦合機構
附錄A圖A8給出了閉環控制所用耦合機構示意圖,包括原、副邊功率繞組L1、L2,短路繞組L3,以及副邊數據發射繞組L4,其中L3與L1集成,共用原邊磁芯,L4與L2集成,共用副邊磁芯。功率傳輸繞組L1、L2采用雙極型線圈繞制方式,左、右兩側磁力線方向相反;短路繞組L3包圍整個原邊繞組L1,通過調整其相對位置,可使得L3耦合到的L1中激勵電流產生的進、出磁通相互抵消,兩繞組間耦合系數k13為 零[20]。類 似 的,將L4包 圍 整 個 副 邊 繞 組L2繞制,實現副邊側兩繞組之間的磁解耦。需要注意的是,實際使用中很難設計k13真正為零,如附錄A表A2所示,但由于k13的存在僅會導致i3略超前于i2[20],等效在控制環路中引入一個很小的超前時間環節,包含于td中,因此對本文的分析結果沒有影響。
耦合機構中,L1、L2承擔功率傳輸的功能;檢測繞組L3短路,與副邊功率繞組L2構成了非接觸電流互感器,檢測流過L2的電流相位;同時檢測繞組L3與數據發射繞組L4耦合,用于實現輸出電壓狀態信息非接觸反饋。
4 實驗驗證
4.1 系統參數
為了驗證上述自激閉環控制策略的有效性,本文采用附錄A圖A8所示耦合機構搭建串/串補償非接觸諧振變換器,實驗裝置如圖A9所示。實驗所用耦合機構參數與功率電路器件、關鍵元件參數如表A2、表A3所示。
由附錄A表A2、表A3可確定耦合系數的變化范圍為0.15~0.38,負載電阻的變化區間為8~25Ω,代入式(12)可以求得閉環調控的輸出電壓限值應為1.02Vin,其中輸入電壓Vin范圍為28~33 V,故輸出電壓限值為1.02×28 V=28.56 V。表A2中系統額定輸出電壓26 V小于28.56 V,滿足輸出電壓限值要求,因此,采用本文所提出的自激閉環控制策略可實現恒壓輸出。
4.2 數據反饋信道性能測試
為驗證所設計信號反饋電路數據傳輸的可靠性和有效性,基于EP4CE6F17C8控制芯片調制生成高頻載波信號與基帶信號,對信號傳輸通道的延遲時間、信噪比、誤碼率進行測試。實驗中,諧振變換器功率電路采用開環定頻控制,工作頻率為124 kHz,輸入電壓為30 V,負載電流為3 A,控制器周期性地發送信號序列0010111000,基帶速率為50 kbit/s,載波頻率為1 MHz,實驗結果如附錄A圖A10所示。
附錄A圖A10(a)中,vc為待傳輸的數字信號,i4為調制后流過L4的激勵電流,vh為原邊提取出來的高頻載波信號,vht為最終解調出來的數字信號。可以看到,解調vht信號與傳送信號vc互反,與圖A6(a)中給出的理論結果相符,驗證了信號傳輸方案的有效性;最終解調出來的數字信號與初始發送的數字信號上升沿存在1.76μs的延遲,下降沿存在1.44μs的延遲,較小的延遲時間使得副邊輸出電壓狀態信息可以快速地被原邊接收,響應快。
用示波器讀取接收信號vh的數值信息,導入MATLAB數學分析軟件,采用snr函數可以繪制得到接收信號的頻譜,如附錄A圖A10(b)所示,并計算得到傳輸信道的信噪比(signal-to-noise ratio,SNR)。圖A10(b)結果顯示,滿功率輸出時信道的信噪比為15.96 dB,因此數據能夠可靠傳輸。控制器EP4CE6F17C8檢測解調出來的數據信號并與發射信號進行判決,分析傳輸信道的誤碼率,如圖A10(c)所示,誤碼率小于0.1%。
4.3 控制系統性能測試實驗結果
首先,確定動態基準電壓的調節范圍Vmin~Vmax,由3.4節的分析可知,為保證對輸出的負反饋調節,可調相移時間的最小值應大于等于0,代入式(17)可求得Vmin≥[(t0+Ts)2Vl2,p]/(R11C11)=?0.27 V。將附錄A表A2、表A3所示的電路參數代入式(10),計算得到閉環控制的輸出電壓增益Gv,con隨動態基準電壓Vcomp的變化曲線,如圖A11所示,為滿足表A3中所需增益調節范圍0.76~0.93,Vmax設為0.6 V。此外,由圖A11可以看到,在Vcomp調節區間內,輸出電壓增益Gv,con隨Vcomp單調變化,Vcomp越大,Gv,con越小。
附錄A圖A12給出了過/欠壓狀態下電流相位檢測電路中電壓、電流的實驗波形,圖中各變量參數定義同圖A6,可以看到2種輸出電壓狀態下,輸出三角波vlt均能跟隨副邊功率繞組電流i2的相位,實現相位檢測,但由于寄生電阻與器件延遲,vlt相對i2存在約220 ns的超前,故取t0=?220 ns。
附 錄A圖A13為氣隙間 距g分別取1、2、3 cm情況下Vcomp、Vo和vc的穩態波形,可以看到,輸出電壓始終控制在滯環范圍內,輸出欠壓時,vc為低電平,控制Vcomp線性減小,使得Vo增大;過壓時,vc為高電平,控制Vcomp線性增大,使得Vo減小,由此實現了對輸出電壓的負反饋調節。氣隙間距g分別取1、2、3 cm情況下,Vcomp平均值分別為0.26、0.18、0.27 V。圖A13中,Vin=30 V,RL=15Ω,則Gv=0.86。由圖A11可以計算出氣隙間距g分別取1、2、3 cm情況下輸出閉環所需的理論Vcomp分別為0.23、0.18、0.24 V,與實驗值吻合較好,驗證了理論分析的正確性。將Vcomp的波形展開,得到不同Vcomp值下的驅動波形,如圖A14所示。在Vcomp增大過程中,驅動電壓vgs超前于副邊功率繞組電流i2的時間增大,自激振蕩頻率增大,與圖A4中的理論分析相符。
圖4(a)和(b)為負載切換時的動態實驗波形,由該圖可見,輸出電流Io從1 A跳變到3 A過程中,Vcomp由0.25 V躍變至0.05 V,輸出電壓經過0.8 ms左右的響應時間后進入穩態,穩定后的輸出電壓仍被控制在滯環范圍內;Io反向躍變過程中,Vcomp由0.25 V躍變至0.05 V,從躍變起至輸出穩定的時間也為0.8 ms左右。而目前常用的無線通信模塊,如射頻通信模塊,系統動態響應時間均在10~100 ms數量級[11-12],因此本文所提控制策略對負載擾動及突變具有較好的抑制能力和快速的動態響應能力。圖4(c)和(d)為輸入電壓Vin切換時的動態波形,從圖中可以看出,控制變量Vcomp始終動態跟隨Vin變化,在整個Vin變化過程中控制輸出電壓一直保持穩定。輸入電壓Vin從28 V上升到33 V,相應的Vcomp從0 V增大到0.35 V,與附錄A圖A11中給出的理論計算結果相符。
圖4 動態實驗波形(g=2 cm)Fig.4 Dynamic experimental waveforms(g=2 cm)
實驗還測試了不同氣隙間距下,閉環控制時輸出電壓隨負載電流變化的曲線,如圖5所示。為了便于比較,圖5中還給出了傳統基于過零基準比較自激控制的負載調整率曲線(即令Vcomp=0 V)。可以看到,無輸出電壓狀態信息反饋時,諧振變換器在變耦合系數與負載下雖然也能實現近似恒壓輸出,但存在較大的輸出波動,輸出電壓在全參數變化范圍內的波動為9.6%;相比之下,本文所提基于動態基準調節的自激閉環控制策略的輸出波動要小得多,輸出電壓在全參數變化范圍內的波動僅為2%,保證了輸出電壓精度,實驗結果證明了本文所提控制策略的優越性。
圖5 不同氣隙間距下輸出電壓隨負載電流變化的曲線(Vin=30 V)Fig.5 Curves of output voltage varied with load current and different air gaps(Vin=30 V)
5 結語
本文提出了一種新型的自激控制策略,通過引入動態基準比較,在保留自激控制良好動態性能的同時實現了對系統輸出的精確調控;建立了控制環路的傳遞函數,分析了動態基準對自激工作頻率與輸出電壓的影響,給出了調控的單調區間與可調輸出電壓限值;提出了具有輸出精確調節功能的非接觸滯環調節控制方案,該方法僅需反饋表征輸出過/欠壓狀態的高、低電平數字信號,檢測便捷、延遲時間小,易于實現。本文還搭建了一臺80 W的樣機進行了實驗,結果表明:數據傳輸的時延在2μs內,信噪比為15.96 dB,誤碼率小于0.1%,驗證了數據傳輸的快速性與可靠性;在負載與耦合系數變化工況下,輸出電壓均穩定在滯環范圍內,輸出電流從3 A跳變到1 A時,系統動態響應時間約為0.8 ms,證明了所提控制策略具有較好的動靜態性能。
為進一步提升動態響應速度,后續將研究采用更高頻的載波調制方案,并結合手機充電等消費電子產品,采用所提控制策略開發相應的控制芯片。
附錄見本刊網絡版(http://www.aeps-info.com/aeps/ch/index.aspx),掃英文摘要后二維碼可以閱讀網絡全文。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06