單相PWM 整流器兩矢量有限集模型預測電流控制
2021-08-05 09:15:48陳津輝李桂虎張清華
電源學報 2021年4期
關鍵詞:實驗
韓 坤,陳津輝,李桂虎,張清華
(1.中車青島四方車輛研究所有限公司,青島 266031;2.西南交通大學電氣工程學院,成都 611756)
電力牽引傳動系統作為高速列車的核心動力單元,主要由牽引變壓器、牽引變流器、牽引電機和齒輪箱組成。牽引變流器主要由單相脈寬調制PWM(pulse width modulation)整流器和三相PWM逆變器組成[1]。與傳統二極管或相控整流電路相比,單相PWM 整流器具有功率因數高、網側電流諧波小和能量可雙向流動等優點,并在光伏并網系統、靜止無功補償器、不間斷電源以及列車牽引傳動系統等領域得到廣泛應用[2-3]。單相PWM 整流器的控制目標主要包括網側單位功率因數、輸入電流正弦化、輸出電壓穩定以及較快的動態響應。
目前單相PWM 整流器常見的控制方法包括電流控制和功率控制[2],主要為瞬態電流控制[3-4]、電壓定向控制[5-6]和直接功率控制[7]等。瞬態電流控制對網側電流瞬時值進行實時控制,保證每一時刻網側電流跟蹤參考給定,其思路簡單且易于實現,然而由于內環控制器通常采用P 或PI 控制器,無法實現交流信號的無差調節;電壓定向控制也即dq 電流解耦控制,通過在同步旋轉坐標系下將網側電流分解為有功分量和無功分量,并采用2 個PI 控制器分別進行調節,該方法可以使網側電流無穩態誤差,但較多的PI 控制器使參數整定過程更加復雜,且導致系統動態響應較慢;直接功率控制以整流器瞬時有功功率和無功功率為控制目標,通過控制有功功率調節直流側電壓,控制無功功率調節網側功率因數,多適用于多模塊電力電子裝置串、并聯的應用場合[8]。
自21 世紀以來,模型預測電流控制MPCC(model predictive current control)在電力電子領域逐漸得到廣泛研究。MPCC 可大致分為兩類,即有限集模型預測電流控制FCS-MPCC(finite control setmodel predictive current control)和連續集模型預測電流控制CCS-MPCC(continuous control set-model predictive current control)。傳統FCS-MPCC 方法對電力電子變換器所有開關狀態進行滾動計算尋優,并得到最優開關序列,保證系統輸出跟蹤參考值。對于單相PWM 整流器,傳統FCS-MPCC 方法下每個開關周期內采用單一開關狀態,雖然輸出電壓可以保持穩定,但具有開關頻率不固定和網側電流諧波大等缺點[9]。文獻[10]實現了電壓源型逆變器的FCSMPCC,大大提高了電流內環的動態響應,并分析了負載參數誤差對網側電流控制性能的影響;針對傳統FCS-MPCC 方法的缺點,文獻[11-12]基于有源濾波器和三相PWM 整流器,通過引入最優占空比概念對傳統FCS-MPCC 方法進行改進,實現了系統開關頻率的固定并提高了網側電流質量;文獻[13]在傳統FCS-MPCC 方法中加入調制模塊,固定了系統開關頻率;文獻[14]將MPCC 方法應用于多電平電路拓撲,通過在評價函數中加入直流側電容電壓偏差項,實現了中點電位平衡控制;文獻[15]在單相級聯H 橋多電平整流器中采用基于兩矢量的FCSMPCC,并考慮冗余矢量對直流側電壓的影響,設計了一種矢量作用順序,保證直流側電壓平衡。
本文以單相PWM 整流器為研究對象,為解決上述傳統FCS-MPCC 方法中的固有缺點,首先建立了單相PWM 整流器的數學模型,并采用前向歐拉法進行離散化;然后,借鑒三相逆變器SVPWM 思想對整流器進行扇區劃分,并給出一種兩矢量有限集模型預測控制方法;最后,對傳統FCS-MPCC 和兩矢量有限集模型預測控制進行小功率實驗樣機對比研究。
1 單相PWM 整流器數學模型
圖1 所示為單相PWM 整流器電路拓撲。圖中:us和is分別為網側電壓和網側電流;Ls和Rs分別為輸入電感和等效串聯電阻;uab為整流器輸入端電壓;S1、S2、S3和S4分別為H 橋電路的4 個IGBT功率模塊;Co和RL分別為直流側支撐電容和等效負載;udc和iL分別為直流輸出電壓和負載電流。
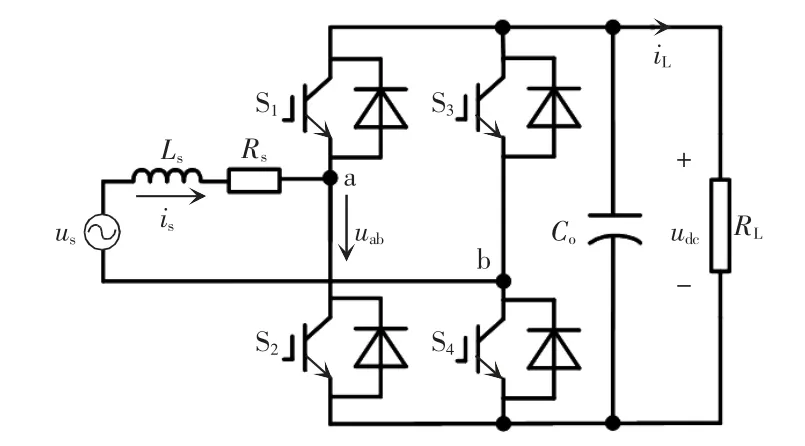
圖1 單相PWM 整流器電路拓撲Fig.1 Circuit topology of single-phase PWM converter
定義整流器開關函數為

開關函數S 定義為

網側等效串聯電阻Rs很小,可忽略不計,則單相PWM 整流器交流側數學模型可表示為

采用前向歐拉法,對式(4)進行離散化,可得

式中:Ts為系統的采樣周期;is(k)為第k 時刻網側電流;is(k+1)為第k+1 時刻網側電流。
2 兩矢量有限集模型預測控制
所提單相PWM 整流器兩矢量有限集模型預測控制框圖如圖2 所示。

圖2 兩矢量有限集模型預測電流控制框圖Fig.2 Block diagram of two-vector-based finite-controlset model predictive current control
2.1 扇區劃分
單相PWM 整流器包含3 種開關狀態即“1”、“0”和“-1”,對其進行扇區劃分,如圖3 所示。
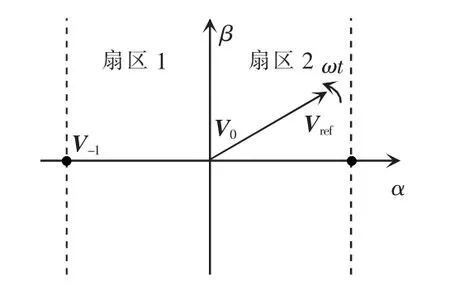
圖3 扇區劃分與基本矢量定義Fig.3 Sector partition and definition of basic vector
圖3 中,參考電壓矢量Vref在α 軸上的投影為單相PWM 整流器各開關周期內的調制信號,且滿足=mudccos(ωt-θ),其中,m 為調制信號的平均調制度,ω 為角頻率,t 為時間,θ 為網側電壓us和間的相位差。根據調制信號的大小,扇區可劃分為:扇區1-udc<≤0;扇區20<≤udc。
2.2 矢量合成
由圖3 可以看出,單相PWM 整流器共包含3個基本電壓矢量,即V-1、V0和V1。每個時刻的調制信號由一個扇區內相鄰兩矢量合成,3 種基本電壓矢量作用下的網側電流變化率可分別表示為

假定一個扇區內相鄰兩基本電壓矢量為Vp(p=-1,0)和Vp+1,且作用時間分別為tp和tp+1,則下一時刻預測電流為

定義評價函數J 為

為使下一時刻實際電流跟蹤電流參考值,存在最優電壓矢量作用時間,保證評價函數J 取得最小值,此時,評價函數J 的導數為0,即

將式(8)代入式(9)可得

若矢量Vp作用時間tp>Ts,則取tp=Ts,若tp<0,則取tp=0。將Vp與Vp+1的最優作用時間tp和tp+1代入評價函數,可得

式中,J(p)(k)為矢量Vp所對應的目標函數。
比較各個扇區邊界基本矢量Vp對應的評價函數,并選擇其中最小的評價函數Jmin。Jmin對應的扇區邊界矢量及其最優作用時間,可以使網側電流快速精確地跟蹤電流給定值。
3 實驗結果
為驗證所提算法的有效性,本文搭建了單相PWM 整流器小功率實驗平臺,并對傳統FCS-MPCC和所提TV-FCS-MPCC 算法進行對比研究,圖4 所示為小功率實驗平臺硬件電路,實驗中主電路參數如表1 所示。
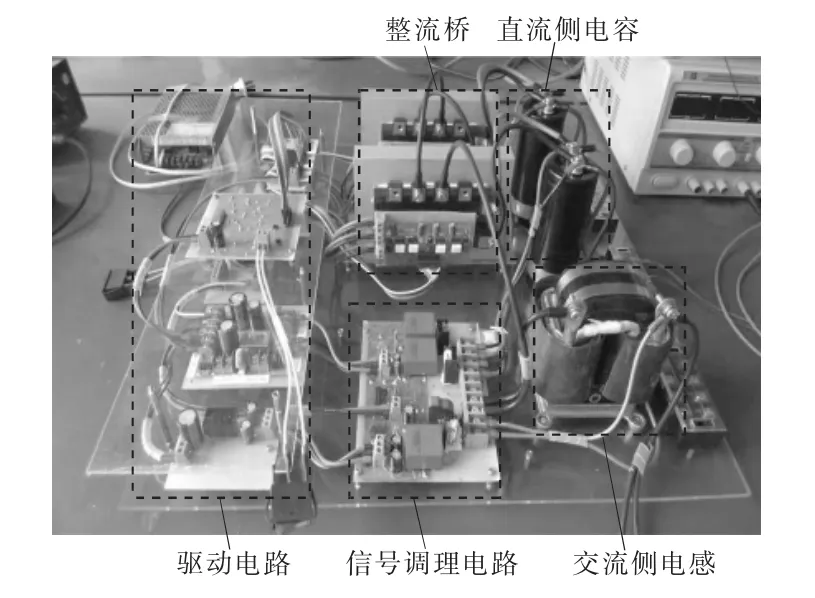
圖4 小功率實驗平臺Fig.4 Scale-down experimental platform
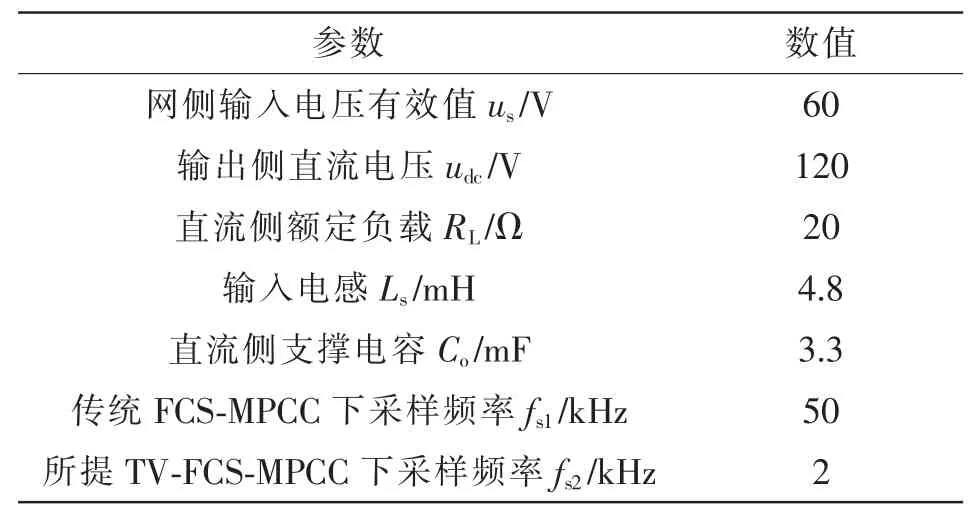
表1 實驗參數Tab.1 Experimental parameters
3.1 穩態性能對比
圖5 所示為兩種控制算法在穩態情況下的網側電壓、網側電流和輸出電壓實驗波形。可以看出,兩種算法均可以使網側電壓和網側電流同相位,且輸出電壓恒定。由圖5(b)可見,TV-FCS-MPCC 算法下,網側電壓和網側電流無較大脈動,波形質量較好。

圖5 穩態情況下網側電壓、電流和輸出電壓實驗波形Fig.5 Experimental waveforms of grid voltage,grid current,and output voltage in steady state
圖6 所示為2 種控制算法下網側電流FFT 分析結果,傳統FCS-MPCC 方法下的采樣頻率fs1為50 kHz,所提TV-FCS-MPCC 方法下的采樣頻率fs2為2 kHz。由圖可知,即使具有較高的采樣頻率,傳統FCS-MPCC 算法下網側電流THD 仍然較高,為8.9%,諧波分布廣泛且頻率較低,因此,為了進一步消除諧波含量需要大幅提高網側電感值或采用更復雜的濾波電路;而所提TV-FCS-MPCC 算法下網側電流THD 較低,為4.72%,由于開關頻率為2 kHz,且采用單極性倍頻調制,其高次諧波主要分布在4 kHz 處,因此,僅通過較小的電感即可有效消除電流諧波含量。由圖5 和圖6 可知,所提TV-FCSMPCC 算法具有更好的穩態性能。

圖6 網側電流FFT 分析結果Fig.6 FFT analysis result of grid current
3.2 動態性能對比
圖7 所示為網側電流給定突變時2 種算法下網側電壓、網側電流和給定電流波形,可以看出,2種算法均可以快速跟蹤給定值,響應時間為5 ms左右。圖8 給出了負載突變時2 種算法下網側電壓、網側電流和輸出電壓實驗波形,2 種算法的響應時間分別為118 ms 和104 ms,響應速度基本一致。由圖7 和圖8 可見,所提TV-FCS-MPCC 算法可以保持傳統FCS-MPCC 算法較好的暫態性能。

圖7 內環給定突變下網側電壓、電流實驗波形Fig.7 Experimental waveforms of grid voltage and grid current under given step change in inner loop


圖8 負載突變下網側電壓、電流和輸出電壓實驗波形Fig.8 Experimental waveforms of grid voltage,grid current,and output voltage under step change in load
4 結語
本文以單相PWM 整流器為研究對象,為了提高系統穩態性能,提出一種兩矢量有限集模型預測電流控制方法,并在小功率實驗平臺上對傳統FCS-MPCC 和所提TV-FCS-MPCC 算法進行對比實驗研究。實驗結果表明,本文所提MPCC 算法可以固定系統開關頻率,顯著降低網側電流THD 值,具有較好的穩態性能;保持了傳統FCS-MPCC 算法的優點,即取消了傳統內環PI 控制器,且在電流內環給定突變下具有較快的動態響應速度。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
