直流近區穩控系統動作時序的仿真與優化研究
2021-07-02 07:45:06陳勇常東旭李勝男朱益華郭琦
廣東電力 2021年6期
陳勇,常東旭,李勝男,朱益華,郭琦
(1.云南電網有限責任公司電力科學研究院,云南 昆明 650217;2.南方電網科學研究院有限責任公司 a.直流輸電技術國家重點實驗室;b.中國南方電網公司電網仿真重點實驗室,廣東 廣州 510663)
隨著昆柳龍特高壓多端混合直流工程的投產,南方電網已形成“八交十一直”500 kV及以上電壓等級“西電東送”大通道[1-2],電網安全穩定運行特性復雜,駕馭難度大,安全穩定控制(以下簡稱“穩控”)系統不正確動作已成為影響電網安全穩定運行的主要威脅之一[3-4]。南方電網各回直流輸電送/受端(以下簡稱“直流近區”)、交流近區都配套設計了規模龐大的穩控系統,控制策略涉及對象繁多而復雜[5-11],交直流互相影響,切機、切負荷容量巨大,對保障電網的安全穩定運行至關重要,穩控系統的任何一個細節設計出錯均可能出現較為嚴重的后果。
穩控系統是由安裝于多個廠站的穩控裝置通過電力系統通信網絡構成的龐大而復雜的二次控制系統[12-14]。在電網故障過程中,穩控系統參與策略計算的某些元件采集量與控制對象的運行狀態都在實時變化,對數據的采集和辨識需要考慮動態因素的影響;同時,電網短時間內相繼發生多重故障時,也需要協調系統各廠站的控制措施,保證控制策略的最優化執行。因此,穩控系統正確識別故障中各元件的實時狀態變化并按照正確的動作時序執行策略,是保障穩控策略可靠執行的基礎。國內部分學者對此開展了相關研究[15-20],針對具體的穩控系統工程應用中出現的具體問題,提出了對應的解決方案,但尚未有系統性或原則性的控制策略設計。穩控系統傳統的靜態模擬試驗不能實時動態地模擬系統潮流和運行狀態的變化,不易發現穩控系統軟件設計中時序配合不當的問題,且交直流系統相互耦合,控制特性復雜;因此,需要基于實時數字仿真系統(real-time digital simulation system,RTDS)和實際直流控制保護系統構建實時仿真平臺,開展穩控系統實時動態仿真試驗,校驗穩控系統的可靠性。文獻[21-23]針對部分直流配套穩控系統展開了實時仿真應用研究,取得了一定的研究結果。
本文基于近年來南方電網直流近區穩控系統實時仿真試驗研究的成果,對穩控系統動作時序相關的典型仿真試驗案例進行系統性的分析,包括主輔判據時序配合、數據采集量有效性辨識以及多廠站穩控策略協調配合等,總結提出穩控系統軟件設計的部分經驗和原則,為后續直流近區穩控系統的設計提供參考和借鑒。
1 穩控主輔判據時序的配合與優化
一次系統在受到故障沖擊后,故障近端電網各電氣元件的功率將經歷大幅度的波動,穩控裝置采集的電壓、電流以及計算的功率、頻率等都快速變化。針對電網發生故障,穩控策略設計中為了確保可靠性,不但要求確認本元件故障(稱為“主判據”),同時要綜合考慮到電網內相鄰元件的潮流和狀態變化信息(稱為“輔助判據”),當控制策略的主判據和輔助判據均滿足動作條件時,穩控系統才會動作出口執行控制措施。輔助判據的主要作用是防誤動作,因此一般設計得較為簡單和寬松[15]。在故障過程中,主判據和輔助判據對應的采集模擬量都在實時發生變化,策略設計往往只關注主判據的設計,而忽略了輔助判據設計的嚴謹性,造成誤判。
如500 kV某換流站作為直流的受端,通過L1、L2雙回和L3單回共3回線將3 000 MW直流功率送入電網負荷中心。當L1、L2雙回故障停運后,剩余的L3線發生過載,需穩控系統執行回降直流功率,以消除過載。L3線過載的主判據為:①L3線過載電流IL3大于過載電流定值Iset,且L3線過載功率PL3大于過載功率定值Pset;②L3線過載延時大于過載延時定值Tset。
基于輔助判據僅用于防誤的設計原則,L3線過載策略的輔助判據采用2個簡單的條件實現:①L1、L2線功率之和突降量ΔP大于功率突降量定值ΔPset;②L1、L2線實時功率之和Pk小于低功率防誤定值PL。
為了重點驗證上述輔助判據設計的可靠性,開展表1的試驗項目。

表1 L3線過載試驗項目Tab.1 The overload testing item of transmission line L3
試驗錄波如圖1所示,事故后L3線的電流和功率均超過定值,線路過載的主判據滿足;但根據過載動作時刻,L1線功率為0,L2線實時功率為1 305 MW,ΔP=255 MW<ΔPset(800 MW),L1、L2線的實時功率之和為1 305 MW,遠大于PL(50 MW),2個輔助判據均不滿足,但裝置仍判別L3線過載策略動作,執行了回降直流功率措施,與預期結果不符合。
根據圖1的開關量波形分析,因本試驗模擬的L1線出口處“三永”故障,故障時刻三回線的電壓均跌落到0附近,裝置計算的實時功率也為0或小于0,使得故障過程的功率突變量及低功率2個輔助判據均滿足條件;同時,裝置軟件在動作整組中對L1、L2線功率和突變量滿足信息和功率低信息進行了完全的保持,如圖1(a)的裝置錄波,導致了2個防誤判據均失效。

圖1 L3線過載試驗項目的裝置錄波Fig.1 Device wave recording of the overload testing item of transmission line L3
本案例表明,穩控裝置在進行輔助判據的實時判別時,需要根據策略表的設計目標進行合理的確認和展寬延時,躲過故障中的暫態過程,正確辨識出與穩控系統策略表匹配的一次系統運行狀態,才能確保穩控策略執行的可靠性。為了解決上述問題,對L1、L2線功率突降ΔP滿足和低功率防誤2個信息進行了優化:
a)上述2個信息滿足經2個周波的確認,以躲過穩控裝置計算功率所使用的最小時間窗;
b)上述2個信息一旦滿足則保持10個周波,并非整組內一直保持,使得裝置能夠對故障過程中采集的功率變化量進行實時跟蹤。
經過上述修改后,對該條策略重新驗證并針對性地設計多條試驗項目,穩控系統均能夠正確按照策略表執行,如圖1(b)所示,證明了優化方案的有效性和可靠性。
2 穩控數據采集量的有效性辨識與優化
在穩控裝置的設計中,其控制對象一般鎖定為裝置啟動前200 ms時刻的數值(穩態值),不考慮其在故障過程中的波動。但在部分應用場合,由于特殊的系統接線方式、多重控制來源或連續控制等策略設計的要求,需要考慮故障過程中控制對象的投停和功率變化等情況,采取合適的數據取用原則,保證采集量信息的有效性。
如某電站裝機9×700 MW,機組序號為10—18,通過甲、乙、丙三回線送入換流站經直流送出。當三回線發生“N-2”故障時,需要根據事故前電站的送出功率執行切機措施,預設的固定切機順序為18→15→12→16→14→11→17→13→10。基于RTDS實時仿真試驗系統模擬甲線“三永”故障跳甲乙雙回,穩控系統策略正確動作;但經多次試驗發現,部分試驗項目裝置切機并沒有按照預定的切機順序執行。雖然切機量相同,但切機選擇有時為18、15、12、16、17號機組﹝圖2(a)﹞,有時為18、15、12、16、13號機組,具有一定的隨機性。
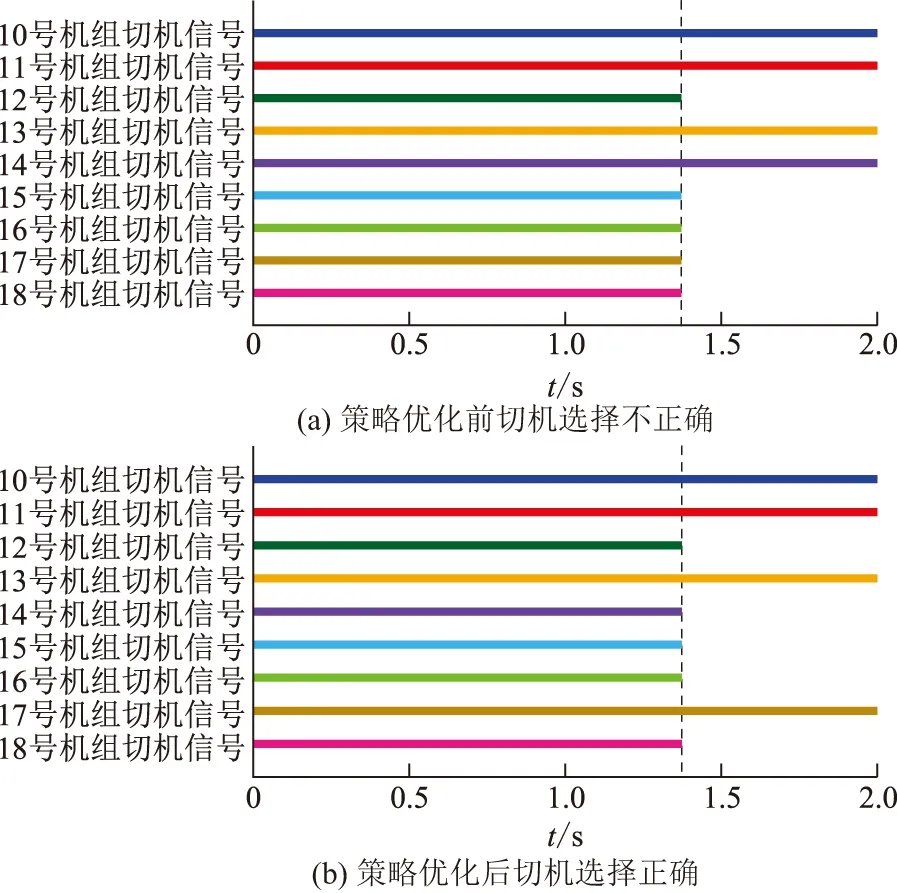
圖2 策略優化前后的切機選擇組合對比Fig.2 Comparison of generation cutting selection before and after strategy optimization
根據穩控裝置說明書中對切機原則的描述,電站三回出線與相應機組為4/3接線配串,當機組邊開關檢修時,出線跳閘會聯切掉同串機組。因機組與檢修開關的對應關系組合過多,裝置軟件進行簡化處理:裝置判別啟動前投運、啟動后停運的機組為出線故障跳閘聯切掉的機組,程序中將該機組的優先級排序提前,供本地策略動作時切除,當系統發生故障時優先切除滿足上述邏輯的機組。
當甲線發生“三永”故障時,電站母線電壓為0,根據RTDS錄波,10號、17號機組在故障過程中的功率快速跌落到最小約為0,如圖3所示;但機組電流在故障時遠大于投運電流,所有機組均應判為投運,裝置應仍按預設固定切機順序執行,不改變切機順序。
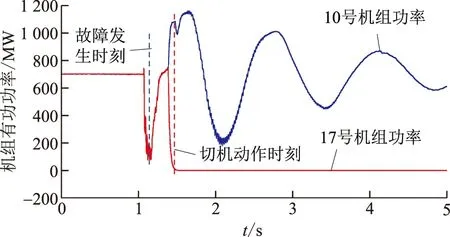
圖3 裝置動作時的機組功率錄波Fig.3 Power wave recording of the generators in case of device action
經核查裝置軟件,發現在處理裝置判別啟動前投運、啟動后停運的機組時,采用的判別條件為:①事故前機組功率P≠0;②事故后機組功率P=0。同時滿足條件①和②,即認為該機組已跳閘,并將其統計到已切機組,優先選擇。在甲線“三永”故障時,若裝置計算的機組功率恰好為0,則滿足上述判別方法,優先被選擇切除。由于機組功率P=0是一個確定值,沒有設計任何誤差范圍,且每次試驗時裝置采集和計算的數據均有細微的偏差,如圖3中雖然10號、17號機組在故障過程中的功率波形完全重合,但由于穩控裝置功率計算的偏差,17號機組被優先選擇切除,但10號機組卻沒被優先選擇(沒有功率P=0的計算點),由此導致了切機隨機性。目前現場穩控裝置均為雙套配置,在最不利的情況下,雖然雙套穩控系統計算的切機量近似,但切機選擇對象可能完全不一致,導致所有機組均被切除,造成極為嚴重的后果。
基于以上分析,穩控裝置將上述判別的條件②修改為“事故后機組停運”,即電流和功率同時小于機組投運定值且經延時,這樣就可以有效躲過故障過程中機組功率的波動。裝置軟件修改后,重復同樣的試驗,切機選擇18、15、12、16、14號機組,選擇正確,如圖2(b)所示;后經大量重復性實驗,并對“單永”、相間和“三永”等多種故障形式進行了驗證,裝置均能正確按照設定的順序切機,不再受故障中機組功率振蕩的影響。
綜上所述,在一次系統故障過程中,穩控裝置判別元件運行狀態時,需要根據自身采樣和算法設計的特點,設置合理的門檻定值,并進行適當的延時確認,避免裝置誤判和控制策略執行錯誤。
3 故障演化過程穩控裝置動作時序配合與優化
穩控系統依賴于多個廠站間的穩控裝置通過通信通道按照嚴格的動作時序實現控制策略,在某些區域穩控系統中,控制策略分散于多個控制站執行,各廠站分別擔負不同的控制功能,在系統發生故障時,各廠站的策略需要協調配合,以達到最終控制效果的最優化。在故障后的系統穩定演化過程中,特別是直流近區交直流系統相互作用,可能導致穩控系統的某些通用性判據不適用,需要根據實際情況對穩控系統的邏輯和判據進行全過程的分析和優化,以確保穩控系統的可靠性。
3.1 多控制主站故障時序配合
如圖4所示,某直流送端通過L1、L2雙回線接入送端交流電網。當L1、L2雙回斷開后,直流與電廠1、電廠2進入孤島運行。直流與主網聯網運行時,L3、L4雙回“N-2”故障穩控策略由電廠2穩控裝置執行,根據事故前電廠1、電廠2機組的出力執行交替切2個電廠機組措施;直流孤島運行時,L3、L4雙回“N-2”故障策略由送端換流站穩控裝置執行,執行限制直流功率措施。

圖4 直流送端一次接線Fig.4 Primary connection diagram of HVDC sending end
本文基于RTDS設計了一個多重故障,以驗證直流被動進入孤島(L1檢修、L2跳閘)后L3、L4雙回“N-2”故障策略執行的有效性,試驗項目見表2。
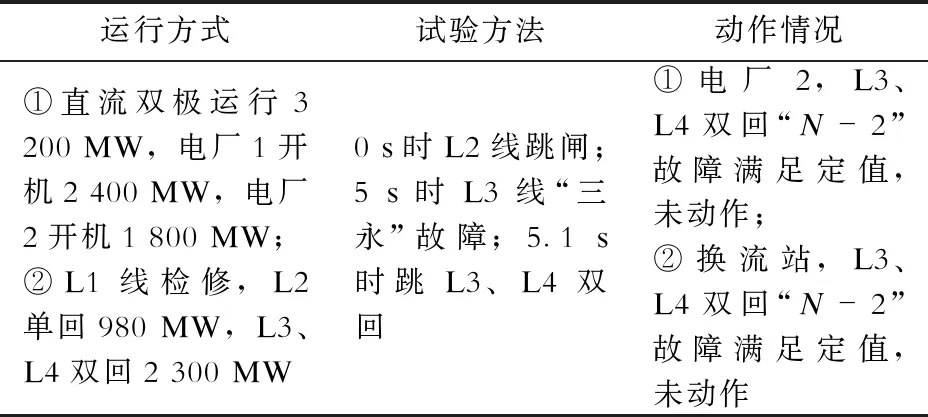
表2 L3、L4雙回“N-2”故障試驗項目Tab.2 Double line trip testing item of transmission lines L3 and L4
本試驗中電廠2和送端換流站穩控裝置均未動作,穩控策略拒動。經分析:當L2跳閘時,系統進入孤島運行狀態,電廠2穩控裝置實時判斷系統運行于孤島狀態不執行切機策略;此時,送端換流站卻仍使用事故前系統方式,即聯網方式,也不執行限制直流功率策略,相關時序如圖5所示。
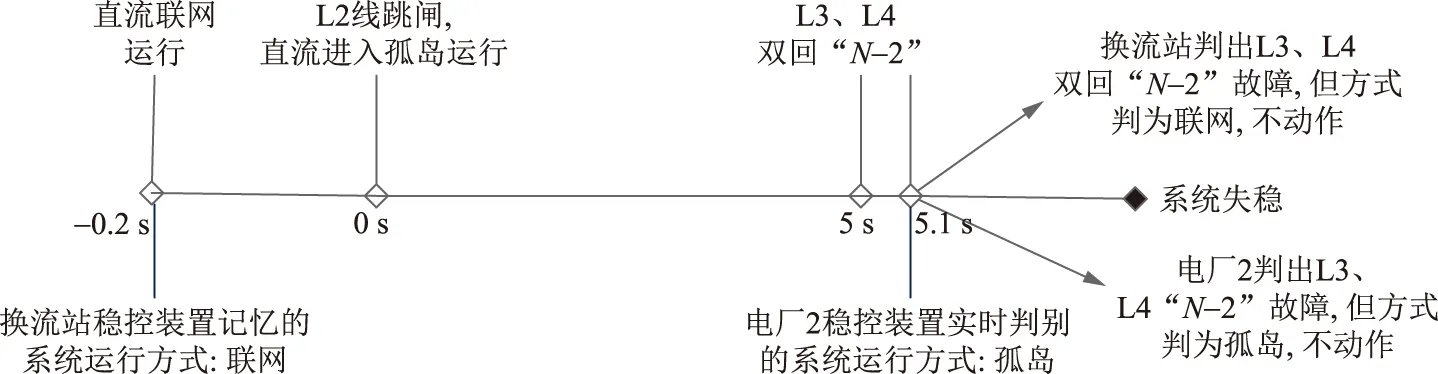
圖5 穩控系統動作時序Fig.5 Action sequence diagram of the strategy test for SSC
分析其原因,電廠2和換流站的穩控裝置分屬不同的設備制造廠商,2個控制站對采集的數據信息和系統時序處理的原則不一致,使得在發生L3、L4雙回“N-2”故障時,2個廠站的穩控裝置均認為不屬于本站策略表內容而拒動,系統失穩。為了有效解決該問題,要求穩控系統應按照同一故障在同一主站處理的原則配置控制策略,該系統已在后續的升級改造中將L3、L4雙回“N-2”故障策略集中于換流站穩控裝置,從根本上避免了上述問題的產生。
3.2 故障演化過程中交直流互相影響對穩控策略的影響
如圖6所示,總裝機量為3 520 MW的電站1和電站2通過變電站1送出,變電站1有2個外送通道,一個是通過L3、L4送出到變電站4,另一個是通過L0線(雙回線的另一回檢修)送出到變電站3,同時,變電站1近區有兩回直流送出,有大容量的配套電源和地區電源。當L3、L4雙線跳閘時,L0線容易過載,需采取切除電站1和電站2機組的控制措施。策略設計中,根據其他系統的設計經驗,為了防止誤判L0線過載,L0線過載的輔助判據為:①L3、L4雙線跳閘或停運;②L0、L1、L2三回線事故后功率突增量大于事故前L3、L4雙回線功率之和的25%,其中L1、L2線功率方向為變電站1流向變電站2,即均為流出變電站1母線方向。
由此,基于RTDS模擬L0線單線運行,1 s時L3、L4雙回線“三永”跳雙回故障,動作時序如圖7所示。

FLC—頻率限制控制,frequency limit control的縮寫。圖6 系統接線Fig.6 System wiring diagram
故障后L0線瞬時功率大于4 000 MW,滿足過載動作門檻定值(3 200 MW),同時L1、L2雙回功率方向為變電站1流向變電站2,輔助判據2個條件均滿足,5.8 s時L0線過載正確動作,按照策略切電站1和電站2共1 920 MW機組。
因切機量較大,系統頻率振蕩下滑至49.85 Hz以下,區域內直流1和直流2的FLC功能動作,配套機組和地區電壓直流送出受限,只能經由交流通道L1、L2送出,L1、L2雙回的潮流方向為變電站2流向變電站1,使得L0線再次過載;但由于L1、L2功率方向與輔助判據定義的方向相反,輔助判據的條件②不能滿足,L0線過載不動作﹝圖7(a)﹞。

圖7 L0線過載策略的動作時序Fig.7 Action sequence diagram of overload strategy of L0
以上問題說明在故障后系統穩定演化過程中,設計過于機械化的判據有可能不滿足實際系統的需求,需要進行動態調整。本案例中L0線過載已經包含了輔助判據的條件②,重復設置可能導致故障后交直流系統的相互作用、潮流頻繁變化,使得輔助判據不滿足,因此可以取消輔助判據的條件②。
經策略優化后,重復上述試驗,穩控裝置在第17.1 s正確判別L0線再次過載,追加切除電站1和電站2共640 MW機組,過載消除﹝圖7(b)﹞,驗證了優化措施的有效性。
4 結論
基于RTDS的穩控系統策略驗證試驗能夠完整地校核穩控系統的故障時序識別與配合,發現裝置軟件中深層次的設計問題,并能夠基于試驗結果針對性地提出優化改進措施,提升穩控系統的可靠性,可在后續新建或改造穩控系統中推廣應用。本文基于典型穩控系統動作時序配合的案例,總結出穩控系統軟件設計的部分經驗和原則:
a)對于故障過程中變化量的計算,穩控裝置軟件需要采用合理的防抖動和保持計數算法,以確保取用的變化量滿足策略表的設計要求。
b)在處理故障中元件投停門檻時,穩控裝置的控制策略必須設計相應的采樣誤差范圍,不應簡單地將其量化為某一數值,并應通過電流、功率或電壓等多重信息校驗。
c)穩控系統多主站時序配合時,必須保證各站裝置同步啟動,對相同采集數據的處理保持同一原則,應將同一故障的策略集中在一個控制站;在設計穩控系統策略時,需要對已有通用判據重新進行穩定演化全過程的適應性評估,以確保其可靠性。
猜你喜歡
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
數學大世界(2018年1期)2018-04-12 05:39:14
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
汽車維修與保養(2015年6期)2015-04-17 03:31:50