飛機裝配中激光雷達測量場布局規劃方法探討
2021-05-27 03:31:26周新房
航空制造技術 2021年8期
周新房,許 斌
(中航西安飛機工業集團股份有限公司,西安 710089)
在飛機制造中,激光雷達[1]發揮著重要作用,工裝安裝、模具和復合材料檢驗、飛機外形檢測等均需要在激光雷達輔助下完成,其精度是影響飛機制造質量的重要因素之一。圖 1為飛機裝配中激光雷達某測量站位測量示意圖。激光雷達需要通過反射光確定待測物體的位置,所以必須保證光路的可達性,測量設備俯仰角、入射角度也必須在一定范圍內。在測量時,為了滿足以上這些條件,必須將激光雷達放置到合適位置。此外,由于飛機產品尺寸較大,飛機在裝配過程中會有上百個測量點分布在不同部位,所以一個站位往往難以完成測量,通常需要進行轉站。基于以上原因,在進行測量活動前,必須進行測量規劃,確定各個測量站位的具體位置[2]。
國內外對于測量測量布局規劃有一定研究。王莉等[3]對工業環境下各類測量方法進行了對比;許振瑛[4]研究了基于遺傳算法的激光跟蹤儀測量點數量及位置確定方法,受限于遺傳算法本身特點,該方法沒有確定的收斂時間;趙樂樂[5]利用OpenCASCADE軟件的三維可視化功能確定測點位置可行性;金漲軍[6]建立了測量場轉站誤差傳遞模型并運用蒙特卡洛算法對該過程進行了仿真;朱峻可等[7]分析了激光雷達的布站規劃和轉站方法;張陽[8]對測量區域劃分、測量特征點集路徑規劃等進行了研究,提高了測量效率;栗輝[9]對測量流程進行了優化,提高了效率。可以看出,目前相關研究并沒有從原理分析測量場布局規劃的核心算法。激光雷達在工程上使用時,往往需要能夠快速、較為精確地確定可行的布局規劃方案。
目前,尚無廣泛使用的激光雷達測量布局規劃軟件,某些激光雷達廠商開發了一些適用于特定環境的激光雷達布局仿真軟件,但并不開放。本文著重分析激光雷達布局的理論模型和數學建模方法,確定激光雷達布局的工程可實現方法,以期設計出具有通用性的激光類測量設備的布局仿真分析軟件。
1 規劃約束
激光雷達在進行測量時,受限于自身測量原理和產品空間位置,需要遵守測量一些約束條件。站位規劃的核心問題就是在這些約束條件下確定激光雷達的站位數量和位置布局。
1.1 測量約束
假設在某項測量活動中,需要測量的點位是Pi(i=1…N),Pi處產品法向為Ni,激光雷達(理論上該位置應該為激光雷達測頭所在位置,為便于討論,本文不區分激光雷達位置和測頭位置,二者只是一個偏移關系)的參考位置為Q。在測量時,直線段() 表示了光路,激光雷達對測量的要求體現在對該直線段的要求。具體地,測量時需要保證以下條件(圖 2):
滿足以上條件的任何Q都是可以對Pi進行測量的。激光雷達布局就是需要找到滿足所有點位要求的位置,當然,可能一個位置無法滿足所有點位的要求,此時就需要多個布局點位。
1.2 碰撞檢測
在幾何約束中,條件距離約束和角度約束是比較容易處理的,而條件干涉約束是比較復雜的。為了處理碰撞檢測,首先需要將模型表示為一種通用格式,本文選擇了STL格式[10]。該格式用一系列三角面片表示實體,每個面片由3個點表示,結構簡單,易于處理,且大多數建模軟件都支持這種格式的導出。這種格式雖然丟失了產品數模的一些信息(如顏色、材料等),但其外形的幾何尺寸都保留了下來,對于激光雷達而言,最重要的就是其外形結構和尺寸,所以選擇STL是完全能夠滿足使用要求的。
因為在STL格式里,產品是由三角面片表示的,對STL格式進行碰撞檢測,本質就是對三角面片進行碰撞檢測。所以只需要求出直線段與 三角面片是否碰撞即可。
如圖 3所示,三角面片與直線碰撞就是三角面片與直線相交。三角面片的3個點S1、S2、S3確定了一個平面S,平面的法向為,假設直線段和三角面片交于點C,若激光雷達與三角面片碰撞,則需要滿足以下條件:
(1)C位于之間。
(2)C位于三角形內部。
其中,(1)表示與的夾角為鈍角,可以利用以下方法判斷:

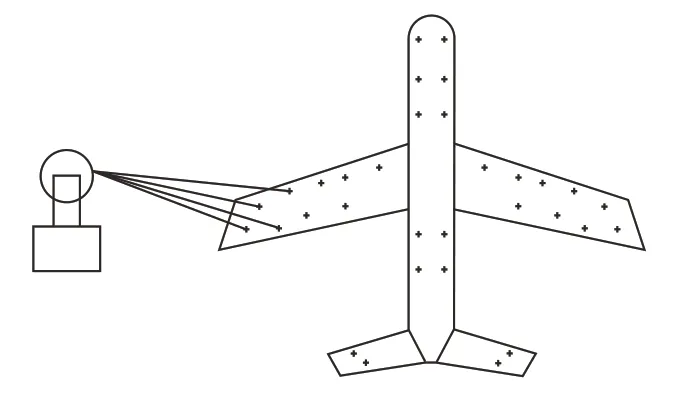
圖1 飛機裝配某站位測量示意圖Fig.1 Diagram of measurement station in aircraft assembly
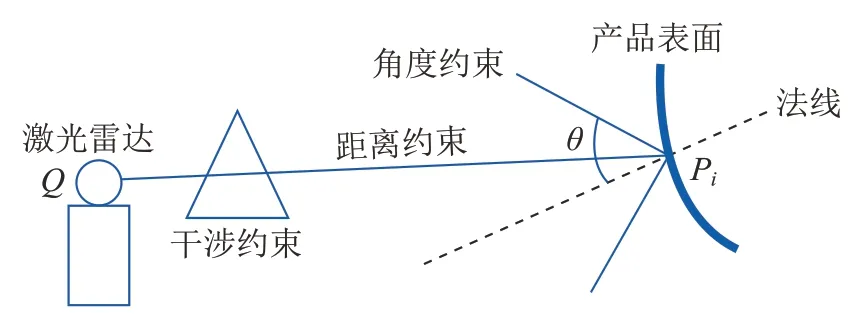
圖2 約束示意圖Fig.2 Diagram of constraints
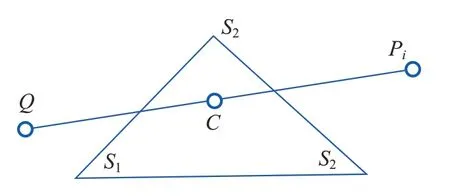
圖3 三角網格與直線段相交Fig.3 Intersects of triangle and line
對于(2),C位于三角形內部即C和三角面片任一頂點位于該點所對應的邊的同側。點位于直線的哪一側,可以利用叉積判斷,如對S3點的第3個分量的正負就表示了其位于的哪一側。當S3與C位于同側時,有和的第3個分量同號。即:
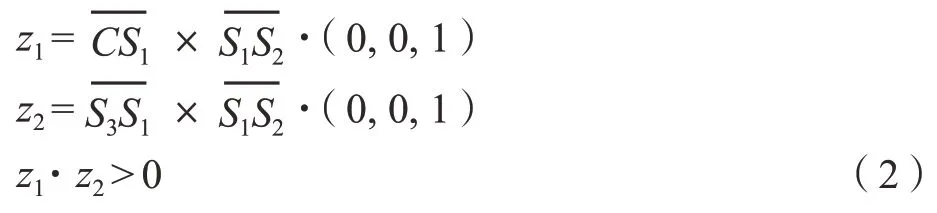
依次對三角面片的三個點和C做同樣的判斷,就可以判斷點C是否位于三角形內部。
利用以上原則就可判斷直線與三角面片是否發生碰撞。在實際計算時,需要對STL格式的每一個面進行判斷。測量規劃需要在滿足幾何約束的條件下確定激光雷達的位置,該位置本質是一塊空間區域,但實際計算時,對該區域進行表示是比較困難的,所以一般應進行簡化。下文將建立該位置的表示方法。
2 測量場數學模型
2.1 滿足約束的幾何圖形
假設待測量點Pi與其法向Ni已知,以Pi為原點,Ni為中心線,θ為頂角的圓錐曲面記為S1。以Pi為原點,L為半徑生成的球面記為S2。則S1與S2的包絡體Si是一個底部為圓錐面,頂部為球面圍成的幾何體(圖 4),在該幾何體內任一點都滿足激光雷達的距離和角度約束,稱為激光雷達的可放置區。
如圖 5所示,假設L=15,θ=25°,則圓錐底面距離球面的長度為Δ=L–L·cos(θ)≈1.4,該值與L相比較小,所以在粗略計算時,可將Si近似為S1(底部封閉,即為空間圓錐體),由于S1∈Si,這樣做相當于減少了激光雷達的可放置區,使得計算結果為可放置區的子集。
2.2 空間圓錐曲面方程
由上一節可知,針對任意一點Pi,激光雷達的可放置區為空間圓錐體,本節將建立該區域的表示方法。假設圓錐面半頂角為α,則頂點在原點,中心線沿z軸(設為N′,且為單位向量)的圓錐曲面方程為:

其中,a= cot(α),zmax表示激光雷達測量半徑。現將圓錐移動至如圖 6所示新位置,即頂點移動至P,坐標為(Px,Py,Pz),中心線變為N(m0,n0,p0),則在此新坐標系中,為:

其中,N′與N夾角為θ=acos(N′·N),新坐標系相當于繞著原坐標系的ω=N′×N=(–n0,–m0,0)旋轉了θ角(并平移了,根據Rodriguez公式[11]:

其中是ω反對稱矩陣,即:
根據坐標系變換為:

將上式帶入式(10)可求得空間圓錐面,再加上其底面的平面所形成的包絡體,就是Pi可放置區域。
2.3 單點規劃
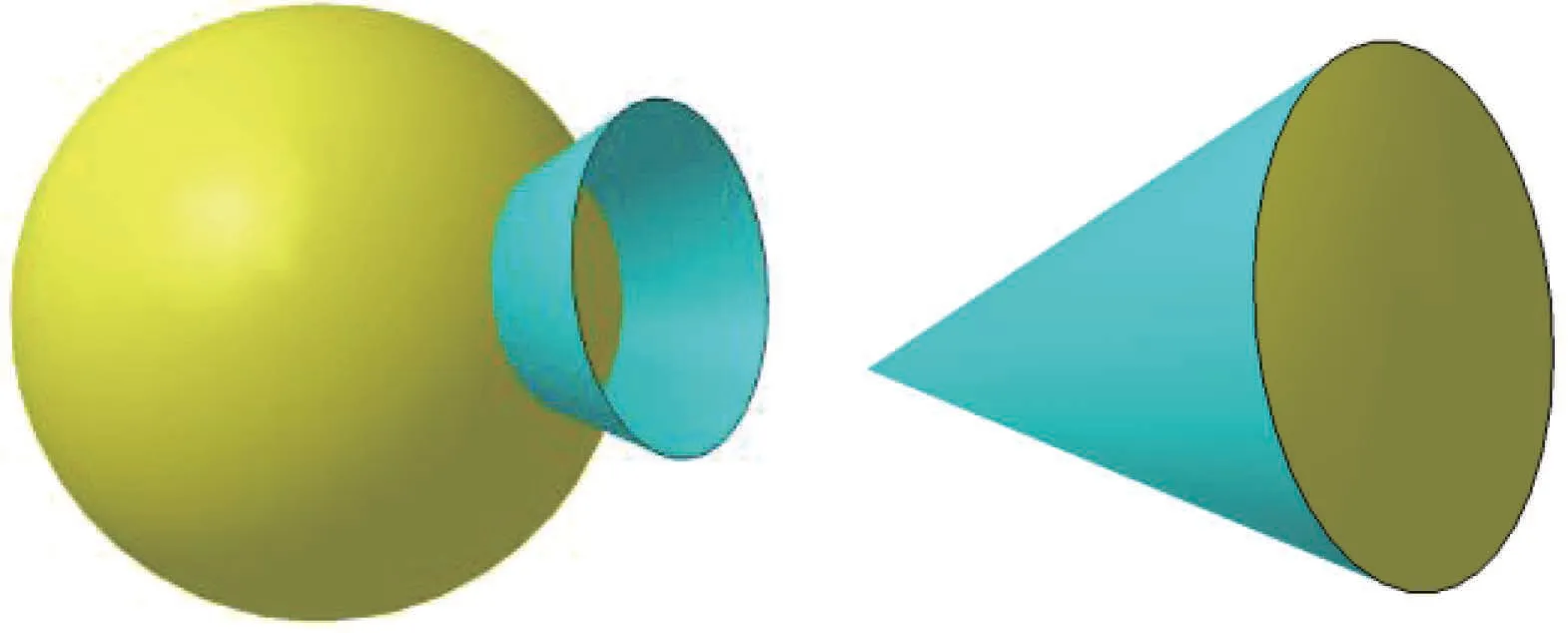
圖4 激光雷達可放置區Fig.4 Laser radar placement area
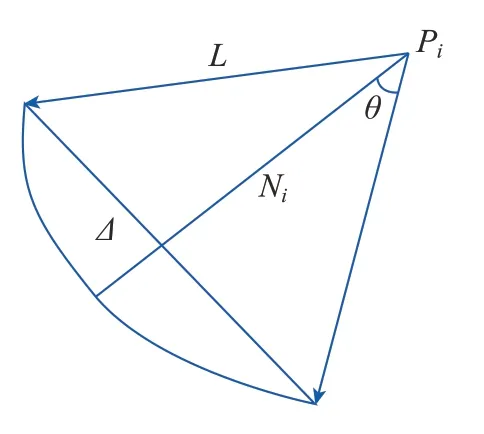
圖5 區域簡化Fig.5 Simplification of aera
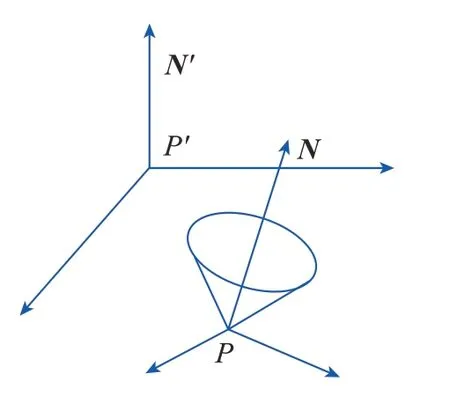
圖6 空間圓錐曲面Fig.6 Spatial conic surface
為了便于激光雷達的安裝及測量,一般將激光雷達直接放置到地面上,其初始放置區域是一個在平面上的區域S0。假設任意點Pi確定的可測量包絡體為Si,Si與S0的相交區域Mi(Mi必然是連續區域)是滿足Pi點的距離約束和角度約束的放置區域(暫不考慮幾何約束3)。若Si與S0不相交,表示S0區域無法測量Pi,需要針對該點另行規劃測量平面(即不在默認的平面上)。
由上一節得到的空間圓錐曲面方程,該方程與S0平面交線為一圓錐曲線:

激光雷達在平面上的可測量區域為各種圓錐曲線圍成的區域Mi,典型形狀如圖 7所示,為針對單點的激光雷達可布局區域。
2.4 多點規劃
因為單點的可測量區域為圓錐曲線圍成的,所以多點的可測量區域是由多段圓錐曲線圍成的區域。設Ti,j表示Mi(此處以圓形為示例)與Mj相交區域,Ti,j,k表示Mi、Mj、Mk相交區域(圖 8),以此類推。
用T*表示所有相交區域,所以,進行站位規劃就是選取數量盡可能少的集合{,…},使其覆蓋所有Mi。如圖 8所示的激光雷達布局規劃的結果就是T1,2,3和T4,5。
所以,正向計算多個測量點位的激光雷達布局結果步驟如下:
(1)針對每個待測量點建立空間圓錐曲面; (2)求所有空間圓錐曲面與測量平面的相交圓錐曲線所圍成的區域; (3)對所有區域計算相交情況,得到覆蓋所有區域的最少數量的交集。
以上計算過程都是非常復雜的,特別是計算多段圓錐曲線的相交結果,在實際工程中難以處理。而在實際工程應用中,為滿足現場裝配要求,往往希望快速得到可行的激光雷達布局方案,所以需要一個簡捷快速的方法。雖然正向求解是非常復雜的,但驗證一個點是否滿足激光雷達布局結果卻相對簡單,下文將基于這種思路提出一種測量規劃方法。
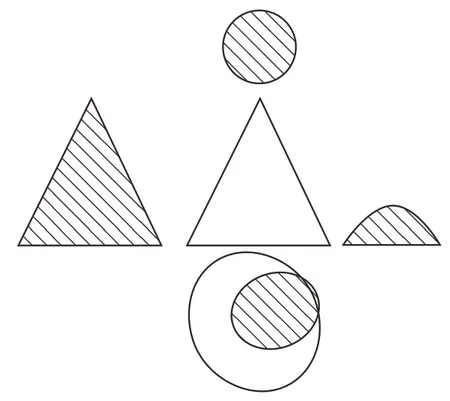
圖7 單點可測量區域Fig.7 Measurable area of single point
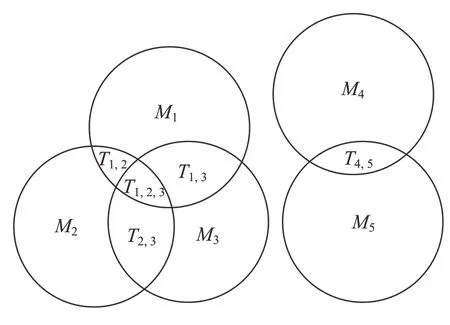
圖8 相交區域Fig.8 Intersection area
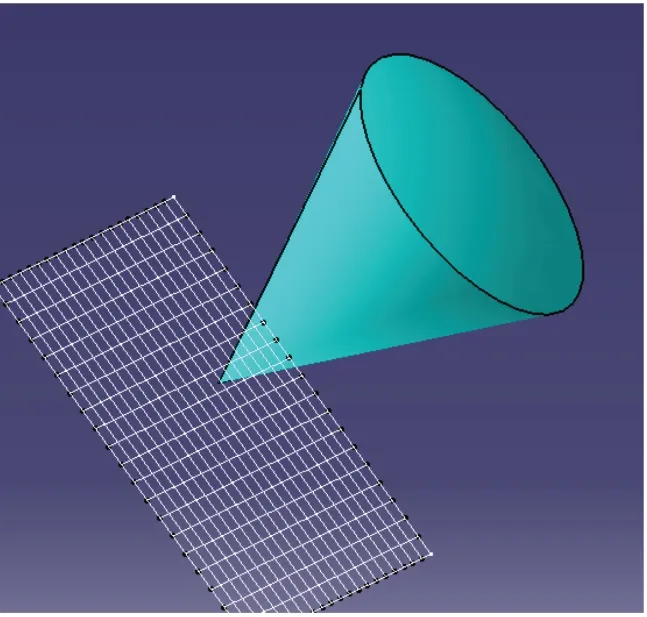
圖9 網格劃分Fig.9 Division of grid
3 基于網格劃分的測量規劃
基于網格劃分的測量規劃,不直接求解規劃點,而是將規劃平面劃分成網格點,再對各個點進行驗證,直到滿足所有測量點的測量要求。
3.1 基于網格法的逆向求解
正向求解是困難的,但給定一個點,對該點校驗是非常容易的。為此將激光跟蹤儀放置平面劃分為網格點(圖 9),針對每個網格點進行反向校驗,驗證該點對任意測量點是否可用。具體如下:
(1)對網格點進行幾何約束校驗,將結果放入矩陣W,Wi,j定義如下:
(2)計算W每一行的和,值最大的那一行(>0)所對應的點Pi就是一個規劃點。該行和最大,表示網格點Pi能夠滿足較多測量點需求。
(3)將W中,由(2)計算的那一行和其該行中所有值為“1”的列刪除。這表示網格點Pi對應的測量點已經得到規劃,只需要考慮余下的點;
(4)返回(2),直到W行和為零。
在計算過程中,若W行和為零,說明所設計的網格點無法滿足這些計算點的要求,此時需要重新規劃網格點。以上計算過程,本質是采用貪心的算法,逐步在網格中查找滿足要求的規劃點位。
3.2 初始網格劃分
由以上算法可以看出,初始的網格點的選擇十分重要,可以通過以下方法選擇初始網格點。
對于任意待測量點P(x0,y0,z0),其法向為Ni,其可測量區域可表示為圖 10,其側面為圓錐曲面,頂部為圓弧。任取可測量區域內一點,令r表示P至該點的距離(r<L),m為單位向量,表示P到該點的方向,且m滿足m·Ni< cos(θ)。
則圓錐體內任一點的參數化方程f(x,y,z):

設激光雷達放置平面方程S0:ax+by+cz+d=0,以上點還必須滿足該平面約束。由于m受兩個方程約束(長度為1且與Ni夾角小于θ),所以點的參數化方程只有兩個自由變量(r和mx或my)。對這兩個變量進行離散掃描,就可以得到激光雷達在S0上的可放置點,該點已經滿足了所有約束。
在掃描時,可令m為驅動變量。首先令m=Ni,得到可測量區域中心點位置。然后令m·Ni= cos(θ)且mx=0,計算得到my(因對稱性一般為兩個)和r,由此得到可測量區域的兩個點。對應的,再令my=0,可再得到兩個點。實際上,該過程類似于手電筒將光照射到了墻上(圖 11)。計算得到的5個點分別位于投影的中心和四周,可依次對初始網格進行劃分。值得注意的是,根據2.3節的理論分析,投影可能不是橢圓,但投影點依然位于邊界上。
對所有點進行相同的離散掃描,就可以得到所有點對應的測量點的初始值。再對這些初始點進行綜合并做以上的逆向求解,就可以確定最終激光雷達的布局。
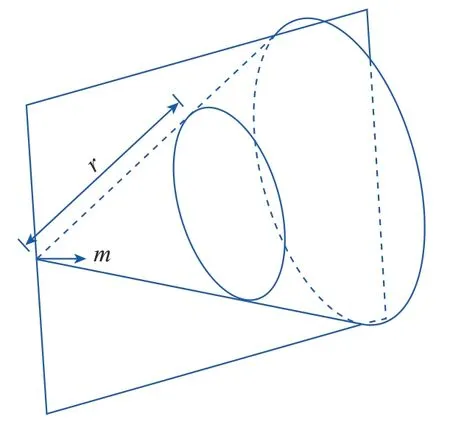
圖10 圓錐曲面示意圖Fig.10 Conical surface
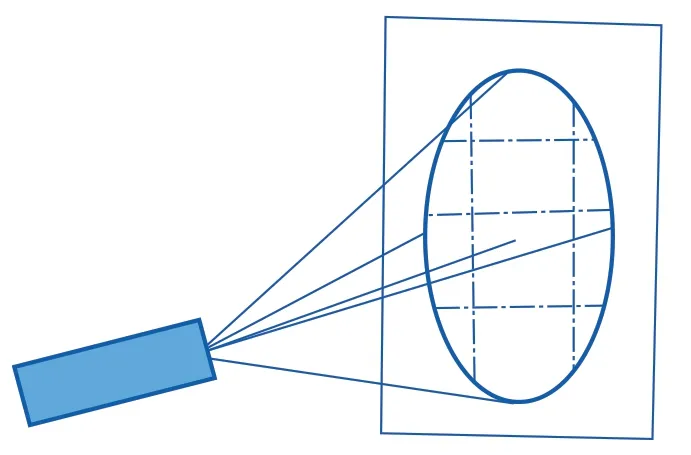
圖11 可測量區域的投影Fig.11 Projection of measurable area
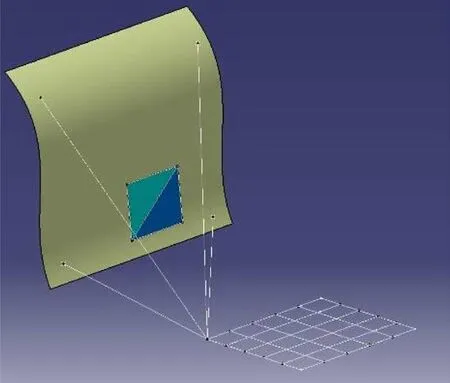
圖12 測量試驗Fig.12 Measurement experiment
4 測量規劃試驗
為驗證以上設計的可行性,設計如下試驗。如圖12所示,某曲面上有4個點需要測量,曲面前面有一個可能遮擋的平面。此處為簡化起見,將平面劃分為兩個三角面片。需要測量4個測量點與三角形面片數據如表 1和表 2所示。同時將規劃平面劃分為網格,取部分網格點如表 3所示(受限于篇幅,本文沒有采用3.2節的方法進行初始網格點的選取)。
假設激光雷達距離限制L=15000mm,角度限制θ=80°,對于網格點Q1,其計算結果如表 4所示。

表1 曲面上需要測量的點的坐標及法向Table 1 Coordinates and normal direction of points to be measured on curved surface mm

表2 面片點坐標Table 2 Point coordinates of patched surface mm
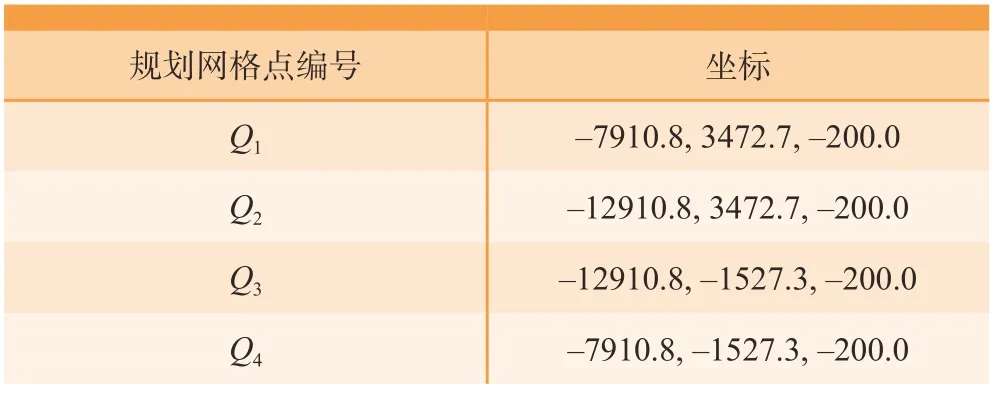
表3 網格點Table 3 Points of grid mm
可見對于Q1而言,無法滿足P4的測量要求,在后續遍歷中可發現,Q4滿足P4的測量要求,所以這種情況下,激光雷達的站位布局為點Q1、Q4。
5 結論
在飛機裝配的測量活動中,往往有大量數據需要測量,所以必須在測量前規劃好測量設備的位置,以便在盡可能少的工位里以高效率、低誤差完成測量。本文基于幾何方法,通過空間圓錐曲面圍城的包絡體表示激光雷達布局區域,以圖形集合的手段求解單點/多點規劃結果,從理論角度探討了激光雷達布局方法。但受限于求解的復雜性,又提出了基于網格劃分的反解法,該方法計算過程易于工程實現。相關研究內容也可應用于其他類似的測量設備的布局規劃。
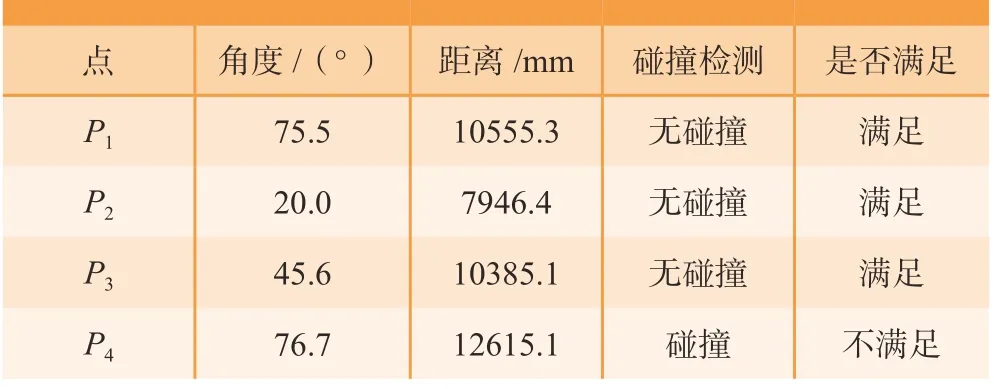
表4 計算結果Table 4 Calculation results
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國工程咨詢(2016年4期)2016-02-14 07:28:28
