BDS/GPS/GLONASS多頻車載RTK定位精度分析
2021-05-07 00:52:18張宇龍王藝希王國宇
礦山測量 2021年2期
關鍵詞:系統
張宇龍,王藝希,王國宇
(1.黑龍江第一測繪工程院,黑龍江 哈爾濱 150025; 2.黑龍江工程學院,黑龍江 哈爾濱 150050)
我國已經完成35顆北斗衛(wèi)星的組網,北斗衛(wèi)星導航定位系統全面建成,并具備面向全球導航定位服務的能力。隨著BDS、GLONASS的不斷發(fā)展,目前已形成三大導航系統競相發(fā)展的局面。GPS系統目前是在全球范圍內應用最廣泛的衛(wèi)星導航系統,但在某些特定情況下可以對民用精度進行限制,而且單系統還存在衛(wèi)星個數有限、空間幾何分布不均勻等缺點[1-2]。多系統聯合定位可以很大程度上改善這些缺點,這對于存在遮擋地區(qū)(如城市、峽谷)的RTK定位提供了可能性。BDS系統目前是世界上唯一全星座播發(fā)三頻信號的導航系統,多頻多系統RTK較單系統RTK在兼容性與拓展性方面存在更高的要求,因此多頻多系統RTK成為了GNSS高精度定位領域的熱門方向。三頻觀測值可以增加組合觀測值數量,選擇最優(yōu)組合觀測值可以對RTK作業(yè)范圍進行提高[3]。
1 BDS/GPS/GLONASS時空統一
BDS、GPS、GLONASS分別對應著不同的時間系統、坐標系統。由于各系統間存在差異,要實現聯合定位就必須將三者進行時空統一[4-5]。
1.1 時間基準統一
為尋求BDS、GPS、GLONASS時間系統統一需要找到一種中間變量與三種時間系統形成聯系,通過對三種時間系統框架進行分析,發(fā)現UTC能與之形成聯系,所以在進行時間基準統一時,把UTC作為中間變量,UTC與BDT、GPST、GLONASST之間的聯系如圖1所示。
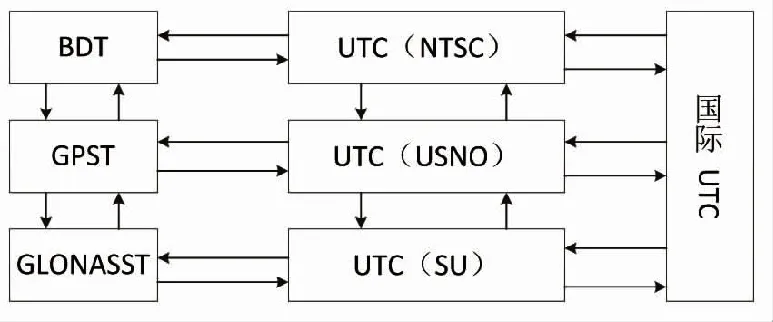
圖1 BDS/GPS/GLONASS時間系統轉換關系
令:
τU-N=UTC(USNO)-UTC(NTSC)
(1)
τU-S=UTC(USNO)-UTC(SU)
(2)
通過推導得出:
GPST=BDT+τU-N+14 s
(3)
GPST=GLONASST-3 h+τr+τU-S+1 s×n-19 s
(4)
BDT=GLONASST-3 h+τr+τU-S+1 s×n-19 s-τU-N-14 s
(5)
1.2 空間基準統一
BDS與GPS分別采用CGCS2000、WGS-84坐標系,對于短基線RTK而言兩者之間差異可忽略,PZ-90到WGS-84轉換按照MCC(Russian Mission Control Center)得到的布爾薩七參數改正模型進行轉換。
目前俄羅斯MCC為世界公認精度最高的坐標轉換七參數。MCC得出的PZ90與WGS84之間的坐標轉換公式為:
(6)
2 三系統RTK定位數學模型
單差觀測方程可以消除衛(wèi)星鐘差以及衛(wèi)星硬件延遲,雙差觀測方程可以在單差觀測方程的基礎上進一步消除接收機鐘差、接收機硬件延遲誤差,還可以對電離層和對流層延遲起進一步削弱作用[6]。
BDS/GPS偽距雙差觀測方程為:
(7)
BDS/GPS載波相位雙差觀測方程為:
(8)
式中,Δφi為單差載波相位觀測值;λi為對應頻率的波長長度;ρ為衛(wèi)星與接收機之間的空間幾何距離;T與I分別為對流層誤差與電離層誤差;n為觀測噪聲以及多路徑效應。
GLONASS偽距雙差觀測方程為:
(9)
GLONASS載波相位雙差觀測方程為:
(10)
式中,Δφi為單差載波相位觀測值;P、Q分別為不同的觀測衛(wèi)星;λi為對應頻率的波長長度;ρ為衛(wèi)星與接收機之間的空間幾何距離;T與I分別為對流層誤差與電離層誤差;n為觀測噪聲以及多路徑效應。

(11)
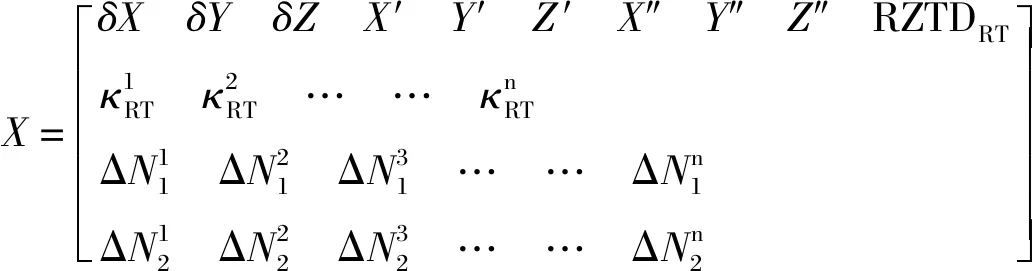
通過變換之后,原來的雙差模糊度項就具有了整周特性,還帶來了一個與基準衛(wèi)星波長相關的單差模糊度,對于雙差模糊度項按照BDS/GPS的方式進行求解,對于單差模糊度項可以利用浮點解結果處理得到精確的初值并歸入到常數項之中[7]。將BDS/GPS/GLONASS觀測方程求解:
(12)
式中,dX為坐標改正向量;上標G、C、R分別為三種不同系統的衛(wèi)星;(x,y,z)為接收機或衛(wèi)星坐標;λP為基準衛(wèi)星的載波長度;ρ0為站星間的幾何距離。
利用GNSS觀測方程構造卡爾曼濾波方程[8-9]:
Xk=Φk,k-1Xk-1+Wk-1
(13)
Lk=HkXk+Vk
(14)
式中,k為時刻;Φk,k-1、H分別為狀態(tài)轉移與系數矩陣;X、W、V分別為狀態(tài)向量、動態(tài)噪聲向量、觀測噪聲向量。
(15)

利用位置均值的自適應算法給出狀態(tài)方程及預測值的方差陣:
(16)
(17)

根據卡爾曼濾波模型計算增益矩陣Kk:
(18)
式中,R為觀測過程中觀測誤差的方差陣。
觀測誤差方差陣的選取是否客觀對濾波的收斂速度和收斂精度有很大影響。動態(tài)噪聲矩陣Qk需要與動態(tài)模型相匹配,與歷元無關。該值對于速度分量的濾波值有較大的影響,所以在進行靜態(tài)和勻速運動時可采取零矩陣。
(19)
Pk/k=(I-Kk·Hk)·Pk/k-1
(20)
3 北斗三頻單歷元固定方法
目前單歷元固定中常用到的TCAR等方法屬于無幾何模型方法,經典的M-W組合屬于TCAR方法,其主要原理為利用超寬巷、寬巷固定的模糊度更新位置信息,這種方法忽略了模糊度之間特有的相關性。本文在有幾何模型的基礎上,通過最小二乘模糊度降相關平差搜索方法,能夠有效提高模糊度固定率。在固定超寬巷、寬巷之后利用二者去對B1、B2、B3三者之間的關系進行約束,固定窄巷模糊度的過程中分別對B1、B2、B3三個頻率建立觀測方程,充分歷元三個頻率的相關信息,這樣數據的相關性得到了很大程度的降低,最后采用最小二乘模糊度降相關平差方法(LAMBDA)進行模糊度搜索固定窄巷模糊度[10]。

3.1 超寬巷模糊度固定方法
(21)

3.2 寬巷模糊度固定方法
(22)
3.3 窄巷模糊度固定方法
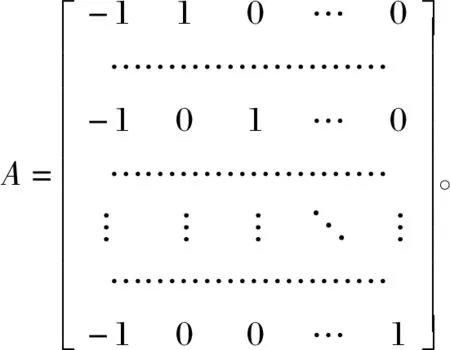
通過已經固定的超寬巷N(0,-1,1)和寬巷N(1,-1,0)約束B1、B2、B3之間關系,采用原始載波觀測值組建觀測方程。假設兩臺接收機同步觀測了n顆衛(wèi)星,那么分別組建B1、B2、B3雙差觀測方程,最終的法方程可以描述為下列形式:
AδX=L
(23)

根據衛(wèi)星進行加權P矩陣處理,最后采用最小二乘求解方程組得:
δX=(ATPA)-1ATPL
(24)
4 車載動態(tài)測試精度分析
車載動態(tài)試驗分別對單GPS、BDS/GPS/GLONASS、BDS(三頻)/GPS/GLONASS三種RTK定位模式進行解算分析,試驗在阜新市外環(huán)公路進行,接收機分別采用天寶R10、徠卡S15接收機,選用LNCORS測試全長12.3 km。車載動態(tài)試驗的道路存在多種復雜環(huán)境,包括樹木遮擋、涵洞、大車交匯等情況,如圖2所示。本次試驗旨在驗證不同定位模式在復雜動態(tài)環(huán)境下的定位穩(wěn)定性以及精度水平。
圖2 車載動態(tài)測試環(huán)境
首先分別對GPS、BDS/GPS/GLONASS定位模式的數據有效性進行分析,判斷依據為天空中能夠達到定位標準的衛(wèi)星是否達到5顆。如表1所示,單GPS系統數據有效率僅為72.8%,加入BDS與GLONASS系統后天空中能夠達到定位標準的衛(wèi)星數大大增加,數據有效比率提升為96%。
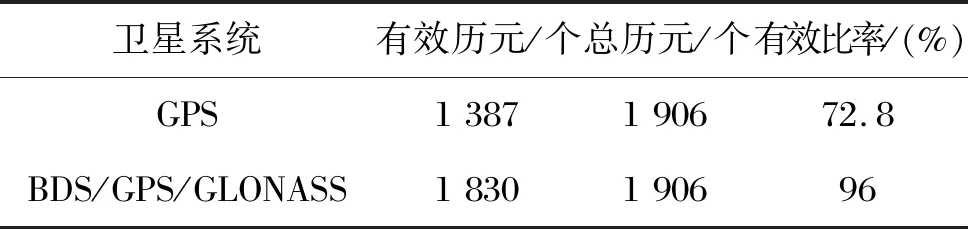
表1 有效歷元統計
圖3所示為單GPS模式的車載動態(tài)軌跡圖,其中綠色點代表固定解,黃色點代表浮點解,紅色點代表單點解,解算成功率僅為68%,主要原因是觀測環(huán)境比較復雜、定位衛(wèi)星數量不足。圖4所示為單GPS模式點位誤差圖,可以看出單GPS定位模式跳點較多,大部分點位誤差在1 m以下,高程方向最大點位誤差達到30 m,北方向最大誤差達到29 m,東方向最大誤差達到25 m。單GPS模式在遮擋環(huán)境下定位衛(wèi)星數量不足,且觀測噪聲較大,會將部分不良值引入卡爾曼濾波過程中,卡爾曼濾波模型需要多個歷元修復濾波狀態(tài)才能重新固定模糊度。
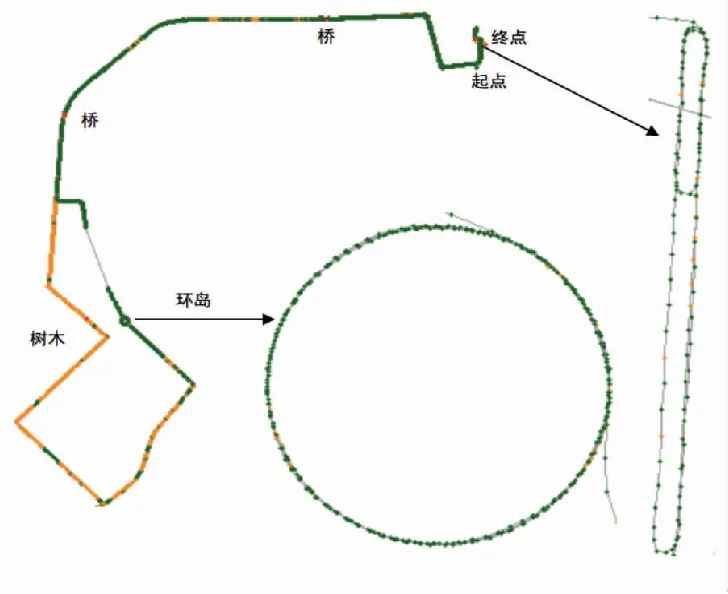
圖3 GPS模式車載動態(tài)軌跡
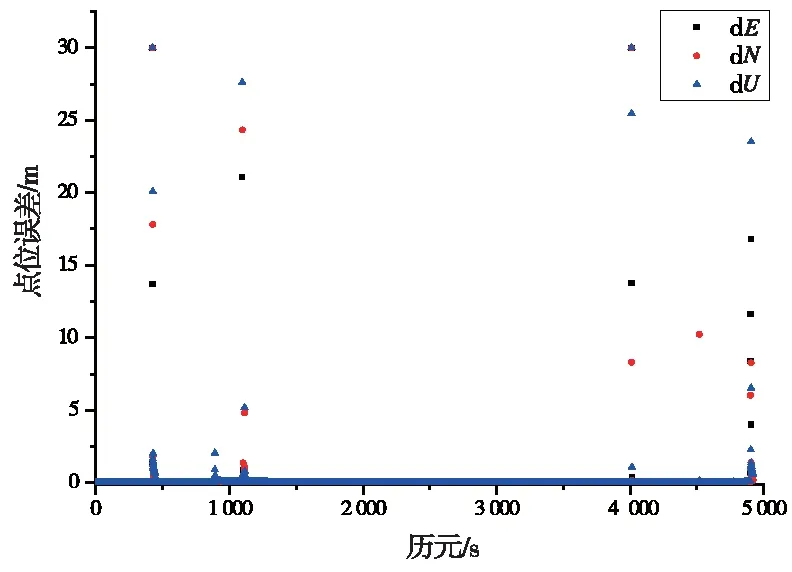
圖4 單GPS模式車載動態(tài)點位誤差
圖5所示為BDS/GPS/GLONASS定位模式的車載動態(tài)軌跡圖,其中綠色點代表固定解,黃色點代表浮點解,紅色點代表單點解。相比較于單GPS定位模式,其定位成功率和精度水平均有明顯提高,固定率能夠提高到75%。對于車載動態(tài)定位,使用多系統聯合定位相對于單系統來說效果改善明顯。圖6所示為BDS/GPS/GLONASS定位模式的點位誤差圖,其中東方向最大點位誤差為22 m,北方向最大點位誤差為20.5 m,高程方向最大點位誤差為23 m,相較單GPS模式多系統聯合定位精度有所提高。
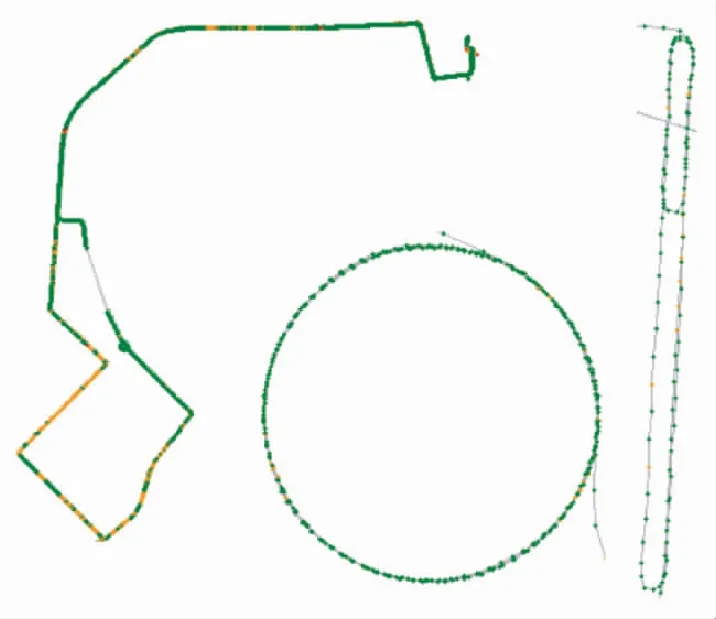
圖5 BDS/GPS/GLONASS模式車載動態(tài)軌跡
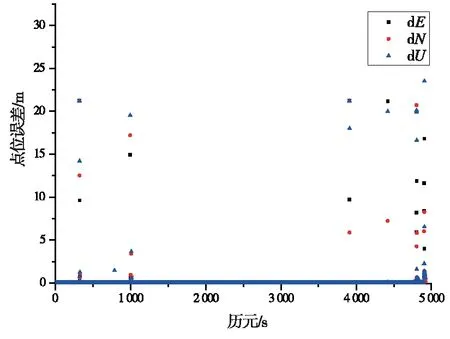
圖6 BDS/GPS/GLONASS模式車載動態(tài)點位誤差
圖7、圖8所示分別為BDS(三頻)/GPS/GLONASS定位模式的車載動態(tài)軌跡圖與點位誤差圖。由圖可以看出,綠色固定點較前兩種定位模式明顯增多,利用三頻觀測值可以單歷元固定模糊度,并且定位誤差固定解為厘米級,但存在多個定位跳點,即衛(wèi)星數不能滿足三頻定位時,給出的是單點定位結果,總體上看比未使用三頻定位模式跳點多,但三頻單歷元可以明顯的判斷模糊度是否固定,比較發(fā)現BDS/GPS/GLONASS方式模糊度多為正確解,但判斷固定的指標Ratio很小,不容易判定;三頻單歷元和單GPS模式比較明顯好于前者,并且定位精度也比較穩(wěn)定,不受前后歷元的觀測條件的影響。采用三頻觀測值單歷元模糊度算法處理車載數據,實時固定衛(wèi)星模糊度,模糊度固定率達到了94.5%,很多濾波無法固定的地方實現了模糊度的固定和高精度解。
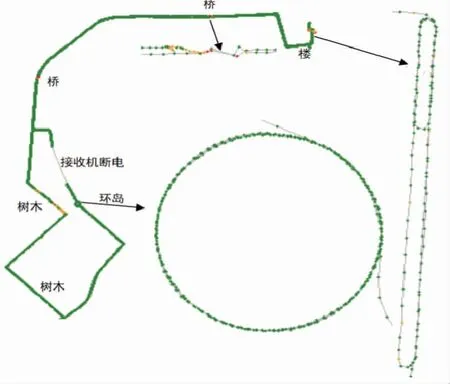
圖7 BDS(三頻)/GPS/GLONASS模式車載動態(tài)軌跡
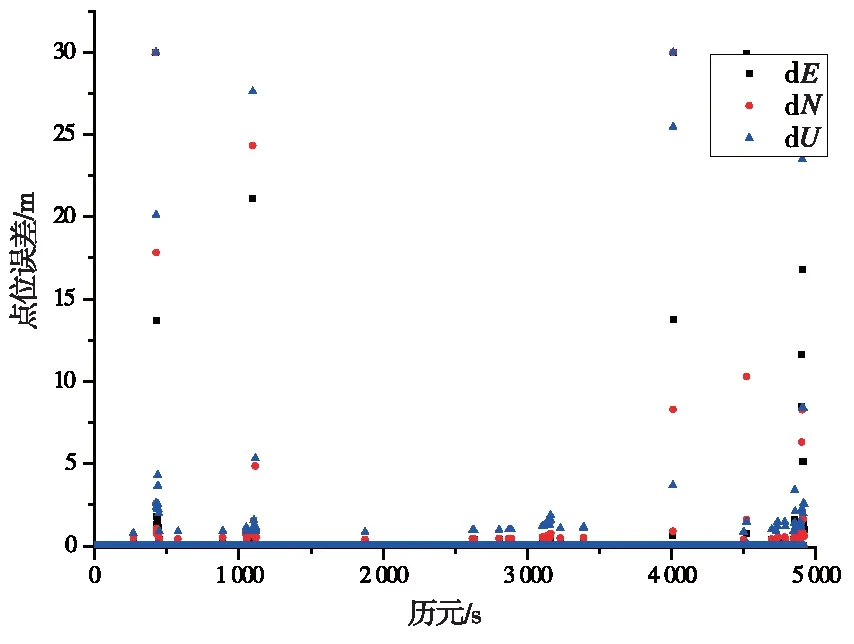
圖8 BDS(三頻)/GPS/GLONASS模式車載動態(tài)點位誤差
5 結 語
本文基于卡爾曼濾波模型兼容了不同系統不同頻率組合要求,并結合北斗三頻單歷元解算模式實現車載動態(tài)RTK厘米級定位,通過實測數據的分析發(fā)現,多系統多頻率組合模式可以在遮擋等特殊環(huán)境下提高定位的可靠性及穩(wěn)定性。本文實驗結果均采用先采集原始觀測數據再進行后處理模式解算,未進行實時解算,日后的研究中可接入實時數據流進行解算獲得車載實時厘米級定位。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32