動態(tài)電壓恢復(fù)器PD 閉環(huán)控制的仿真研究
2021-05-06 11:59:12張智華徐廣澤
南通職業(yè)大學(xué)學(xué)報 2021年1期
關(guān)鍵詞:系統(tǒng)
徐 勇,龔 旭,張智華,徐廣澤
(江蘇航運職業(yè)技術(shù)學(xué)院 交通工程學(xué)院, 江蘇 南通 226010)
隨著電力電子技術(shù)的快速發(fā)展,基于電力電子技術(shù)的用電設(shè)備得到廣泛應(yīng)用,同時,現(xiàn)代電力系統(tǒng)用電負(fù)荷結(jié)構(gòu)也發(fā)生了重大變化。諸如港口起重機械、電力機車等大容量、沖擊性、波動性、非對稱性負(fù)荷的運行,不僅給電網(wǎng)輸出大量諧波,而且還會產(chǎn)生嚴(yán)重的電壓波動、電壓閃變和三相不平衡等電能質(zhì)量問題。動態(tài)電壓恢復(fù)器(Dynamic Voltage Restorer,DVR)是 Custom Power 家族中的重要成員,屬于串聯(lián)型電能質(zhì)量調(diào)節(jié)器,是一種用于實現(xiàn)電壓質(zhì)量補償?shù)男滦碗娏﹄娮友b置。與安裝不間斷電源UPS 相比,使用DVR 具有較高的性價比[1-2]。傳統(tǒng)注入電壓開環(huán)控制方法系統(tǒng)輸出效果不理想,因此,本文提出采用以DVR 實際輸出電壓為控制目標(biāo)的PD 閉環(huán)控制方式,以改善系統(tǒng)的動態(tài)性能。
1 DVR 數(shù)學(xué)模型及開環(huán)控制分析
DVR主要由變壓器、逆變器、儲能單元組成,串聯(lián)于供電線路的DVR 結(jié)構(gòu)如圖1 所示[3-4]。
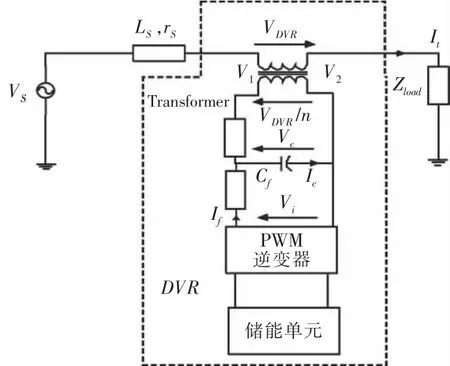
圖1 串聯(lián)在供電線路上的DVR 結(jié)構(gòu)
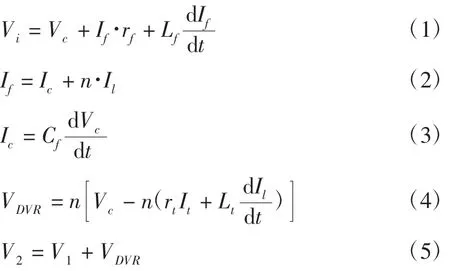
圖 1 中,V1為電源的供電電源,V2為負(fù)載電壓,VDVR為 DVR 輸出的補償電壓,Vi為逆變器輸出電壓,Il為負(fù)載電流,IC為濾波器電容電流,If為濾波器電感電流,Cf為濾波電容,Lf為濾波器電感,rf為濾波電感電阻,Lt為變壓器電感,rt為變壓器電阻,變壓器變比為1∶n。圖1 所示的DVR 工作時,在輸入電壓為Vs的狀態(tài)下,電路平衡計算如下:
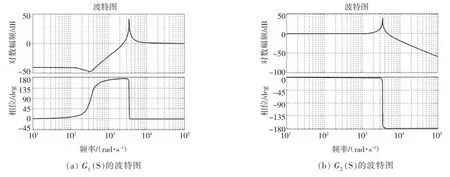
圖2 參考電壓對輸出電壓、電源電壓對輸出電壓的頻率響應(yīng)
常用的開環(huán)控制原理是:DVR 對電源供電電壓V1進行測量,并提取基波特征值,根據(jù)補償策略得到DVR 的參考輸出電壓V*DVR,從而得到參考負(fù)載電壓V*2,將V*2與供電電壓V1的差值作為控制器的輸入信號,驅(qū)動DVR 硬件電路,從而將補償電壓直接加至負(fù)載,計算分析可得負(fù)載電壓為

根據(jù) G1(s)、G2(s)的特征根,獲取參考電壓對輸出電壓、電源電壓對輸出電壓的頻率響應(yīng)如圖2。
由圖2 分析可得系統(tǒng)的阻尼系數(shù)較小,會導(dǎo)致負(fù)載電壓一定程度的振蕩,對負(fù)載帶來不利影響。
2 DVR 的 PD 閉環(huán)控制
為提高控制系統(tǒng)的動態(tài)補償特性,將負(fù)載電壓的實際輸出與其他參考電壓進行比較,采用PD技術(shù)進行控制,并設(shè)計PD 控制系統(tǒng)如圖3 所示[5]。
由圖3 可見,DVR 裝置輸出電壓VDVR與參考電壓V*DVR比較,產(chǎn)生的誤差信號經(jīng)PD 控制后作為PWM 的控制信號Vi,有

將數(shù)學(xué)模型代入計算,可得DVR 閉環(huán)控制時的傳遞函數(shù)

為使VDVR能跟蹤其參考輸出電壓V*DVR,同時盡量不受負(fù)載電流Il的影響,在控制系統(tǒng)Vi處增加了兩項輸入,可得到

圖3 PD 技術(shù)控制系統(tǒng)

調(diào)整后DVR 實際輸出電壓VDVR關(guān)于V*DVR和Il的傳遞函數(shù)的特征方程為:

該系統(tǒng)穩(wěn)定的條件是特征方程的所有根均在復(fù)坐標(biāo)的左半平面,D(s)的特征根為 S1,2=
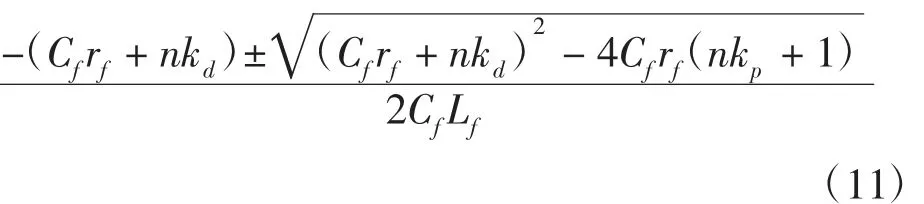
求解可得,當(dāng)kd>0,D(s)特征根就在復(fù)平面的左側(cè),系統(tǒng)穩(wěn)定。同時,B*(s)的形式為sG(s),因此一段時間后,Il對VDVR的影響趨于零。而A*(s)是一個二階系統(tǒng),容易調(diào)整系統(tǒng)特性。下面對A*(s)進行分析:
通過變換可得
經(jīng)計算可得二階系統(tǒng)的自然阻尼頻率ωn和阻尼常數(shù)ξ 分別為:
從式(14)、(15)可以看出,選擇不同的 kp、kd可以得到不同的ωn和ξ,這里ωn與濾波器的截止補償系統(tǒng)電壓中的低次諧波,截止頻率Kf的選取既要不影響DVR 對低次諧波的補償,還須濾除逆變器的開關(guān)頻率。根據(jù)實際情況選取kp=11,kd=0.0017,進行仿真分析,得到A(*s)和B(*s)的頻率響應(yīng)如圖4。從圖4 可見,負(fù)載電壓VDVR對參考電壓V*DVR穩(wěn)定裕度大,頻率響應(yīng)效果良好。
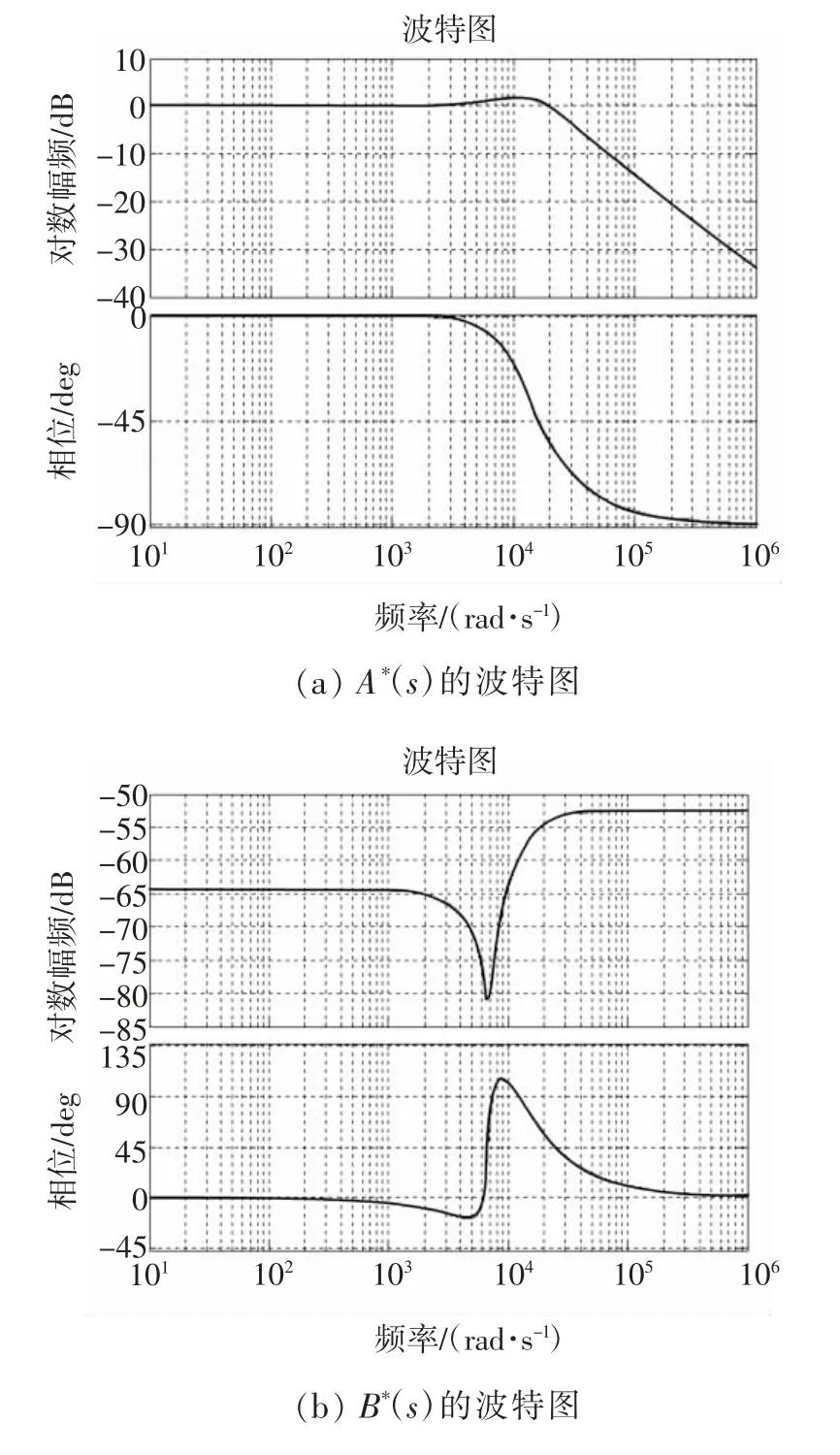
圖4 A*(s)和B*(s)的頻率響應(yīng)結(jié)果
3 仿真驗證
采用Matlab/Simulink 作為軟件平臺,以AMD Ryzen 5 3.4 GHz 處理器、8 GB 內(nèi)存的 Lenovo 計算機為硬件平臺,對開環(huán)控制方法和PD 控制方法進行電壓凹陷補償仿真,并分別采用同相補償法、最小能量補償法兩種策略進行對比實驗,以驗證不同方法的控制效果。實驗條件為:工作電源V1=1 pu,頻率 5 0 Hz,初始相位角為0°,負(fù)載功率因素為 0 .85,在 0 .15~0.3 s 發(fā)生50 %的電壓凹陷并伴隨30°的相位跳變。
圖5、圖6 分別為開環(huán)控制和PD 控制方式下采用兩種不同補償策略的仿真結(jié)果,圖中的虛線為發(fā)生凹陷的波形,實線為補償后的電壓波形。對比圖5、圖6 可以看出,系統(tǒng)采用PD 閉環(huán)控制時,補償后的電壓波形更光滑,補償效果更理想。
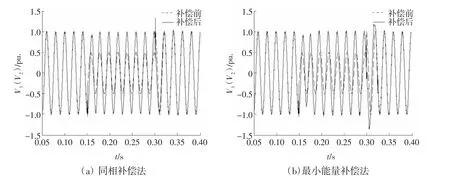
圖5 開環(huán)控制方式補償效果
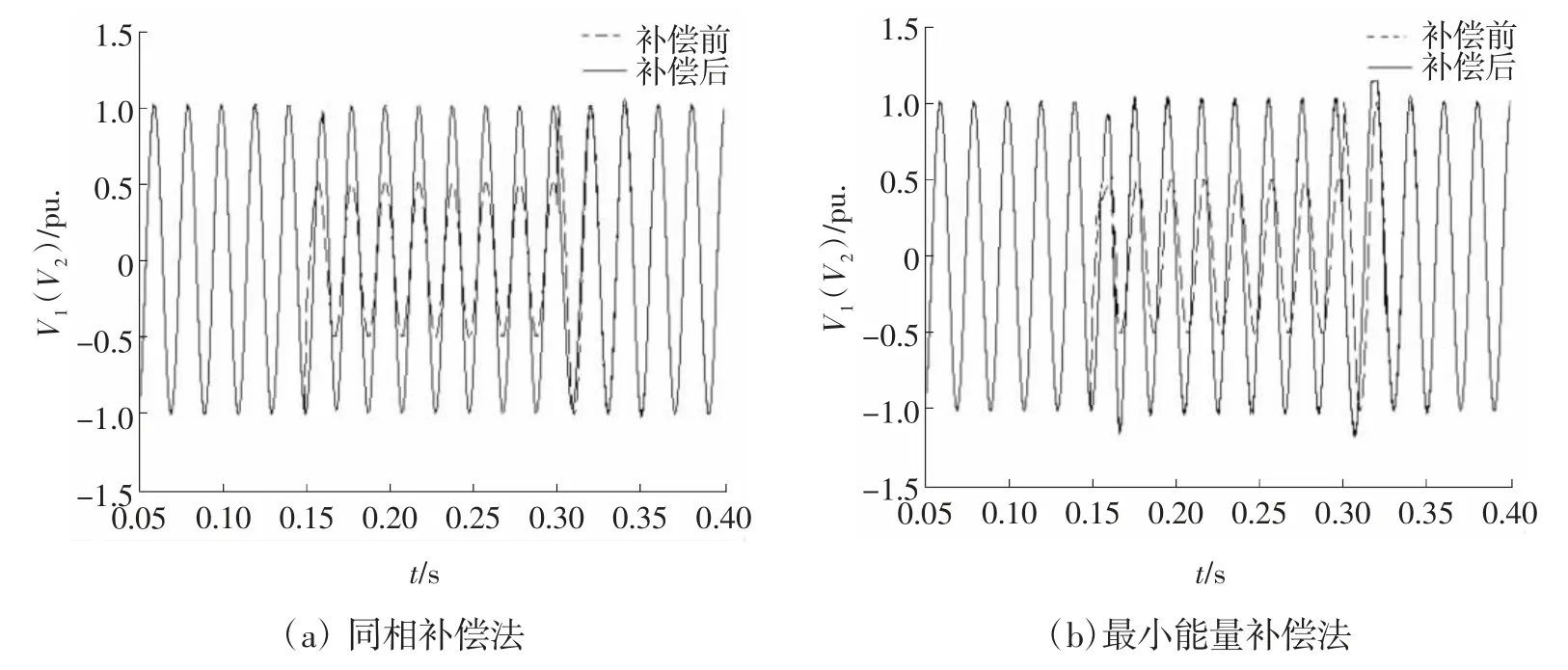
圖6 PD 控制方式補償效果
4 結(jié) 語
根據(jù)DVR 工作原理,對DVR 串聯(lián)在供電系統(tǒng)中的電路圖及數(shù)學(xué)模型進行了分析,對目前常用的以負(fù)載電壓為控制目標(biāo)的開環(huán)控制方法進行了研究。結(jié)果顯示,開環(huán)控制存在阻尼小、穩(wěn)定度不夠,易對負(fù)載電壓產(chǎn)生振蕩等問題。針對此,提出對DVR 輸出電壓進行PD 閉環(huán)控制的方法。仿真驗證表明,PD 閉環(huán)控制方式下的DVR 系統(tǒng)可有效補償電壓凹陷,且改善了系統(tǒng)的動態(tài)補償特性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
