基于軌跡靈敏度頻域特征提取的電力系統仿真誤差主導參數識別
2021-03-29 06:03:18劉征帆蔣振國李德鑫劉座銘
電力自動化設備 2021年3期
劉征帆,安 軍,蔣振國,李德鑫,劉座銘
(1. 東北電力大學 現代電力系統仿真控制與綠色電能新技術教育部重點實驗室,吉林 吉林132012;2. 國網吉林省電力有限公司電力科學研究院,吉林 長春130021)
0 引言
動態仿真是了解電力系統動態行為的重要手段之一[1],仿真精度對電力系統安全分析的有效性具有重要影響[2-3]。實際系統中已多次出現動態仿真無法反映系統實際行為的問題[4],仿真的有效性問題受到越來越多的關注[5]。元件模型參數不準確被認為是導致動態仿真結果和實測數據軌跡不一致的主要因素[6]。由于實際運行條件的復雜性及元件老化等因素,電力系統中各元件的參數識別難免存在誤差[7]。從計算能力和時效性角度出發,難以對系統中所有誤差參數進行校核。同時,大量研究表明不同參數對動態行為的影響程度存在差異,僅需識別對動態行為影響最顯著的相關參數,即主導參數[8],通過對主導參數的校核可顯著提高動態仿真可信度。
如何準確識別仿真誤差的主導參數集是一個難題。靈敏度分析方法廣泛用于主導參數集的識別:文獻[9]基于軌跡靈敏度最大值的大小進行排序,選擇靈敏度最大值較大的參數組成主導參數集,該方法僅能利用軌跡靈敏度曲線上某點的數據,無法充分利用軌跡靈敏度曲線蘊含的豐富信息;文獻[10]提出了參數對有功功率第一擺振幅和振蕩阻尼的靈敏度指標,通過該指標確定主導參數集;文獻[11]按仿真時間步長對靈敏度進行累加,從而確定待校正參數集。以上研究均從時域角度提取軌跡靈敏度的少量特征,并未充分挖掘軌跡靈敏度中蘊含的豐富動態信息,故而影響了主導參數識別的效果。
頻域分析為研究動態系統行為特征提供了另一個思路。本文從頻域分析角度出發,提出了一種基于軌跡靈敏度頻域特征提取的電力系統仿真誤差主導參數識別方法。通過分析仿真誤差的頻域特征,提取誤差敏感頻點;分析參數軌跡靈敏度在敏感頻點處的頻域特性,構建平均幅值和幅值比作為頻域指標,通過計算各參數軌跡靈敏度的頻域指標并進行排序得到仿真誤差的主導參數集。本文基于WSCC 3 機9 節點系統進行仿真,結果表明所提方法提高了主導參數集識別的有效性,為電力系統動態仿真中的模型驗證與參數校正提供了理論支持。
1 軌跡靈敏度的計算方法
軌跡靈敏度是定量描述動態系統中某一參數或者結構的微小變化對系統軌跡影響程度的數學工具[12],在電力系統動態分析的多個領域都得到了廣泛應用。
系統受擾后的動態行為可用式(1)描述[13-14]。

其中,t為時間;x(t)和y(t)分別為系統的狀態變量和代數變量;α 為系統的參數。式(1)中上式為系統中的微分方程,下式為系統中的代數方程。
根據軌跡靈敏度的定義,可得軌跡靈敏度方程如式(2)所示。

其中,xα=?x/?α 和yα=?y/?α 分別為參數α 對軌跡x(t)和y(t)的靈敏度。采用數值方法聯立式(2)進行求解,即可獲得系統的受擾軌跡和軌跡靈敏度。
式(2)計算較為復雜,通常采用式(3)計算軌跡靈敏度[15-16]。
其中,Δα 為參數攝動量。此方法采用2 次仿真結果相減,計算簡單,概念清晰,減輕了建立軌跡靈敏度數學模型的任務。
2 軌跡靈敏度頻域特征提取的基本原理
與靜態靈敏度不同,軌跡靈敏度自身是一個動態軌跡,其蘊含著豐富的動態特征以及參數對動態系統特征的影響趨勢。本文采用頻域分析方法提取軌跡靈敏度和仿真誤差中的動態特征,建立二者之間的關系,為實現主導參數的準確識別提供重要理論支持。
2.1 頻域變換的基本描述
離散傅里葉變換DFT(Discrete Fourier Trans‐form)是一種成熟的分析方法,可將離散的信號序列由時域變換到頻域。某有限長時域連續曲線f(t)可表示為:

其中,a0為常數偏置量;ai和bi為i 次諧波的傅里葉系數;T 為總時長。對式(4)所示的曲線進行采樣得到時域離散有限長樣本序列x(n),常用的DFT 方法如式(5)所示。

其中,N為序列x(n)的長度;X(k)為x(n)對應的頻域樣本序列,顯然其長度也為N。
從式(5)中可見,X(k)為與x(n)相關的級數,因此頻域的每一個點實際上包含全體時域點的信息。在電力系統動態仿真中,注入實測數據和仿真結果都是離散序列,可以使用DFT方法進行頻域變換。
2.2 仿真誤差的頻域特征
仿真結果與實測數據之間的不一致可以用誤差Δx(n)表示,如式(6)所示。

其中,xr(n)為實測數據;xs(n)為仿真結果。由式(6)可知,實測數據作為信息被包含于誤差中。
使用DFT 方法對誤差曲線進行頻域變換,得到其頻譜。圖1 為某擾動下某有功功率仿真誤差曲線及其頻譜。圖中ΔP為標幺值,由DFT原理可知頻譜幅值單位與ΔP相同。

圖1 某有功功率仿真誤差曲線及其頻譜Fig.1 Curves of active power simulation error and its spectrum
由圖1 可見,誤差曲線存在波動特征,誤差頻譜存在明顯峰值,峰值所在頻點即為誤差中含有的主要頻率分量。只要補償該主要頻率成分,即可顯著減小仿真結果與實測數據之間的誤差,故應提取峰值所在頻點為仿真誤差的敏感頻點。
2.3 軌跡靈敏度的頻域特征
元件模型參數與系統實際參數不一致是產生仿真誤差的主要因素[6]。可認為仿真誤差Δx(n)是各參數從其模型現有值到真實值的軌跡靈敏度積分的累加,如式(7)所示。

其中,Si為與參數值αi有關的軌跡靈敏度;αr,i為參數真實值;αm,i為模型參數現有值;NP為參數總量。由式(7)可知,誤差中包含參數軌跡靈敏度的信息。
同樣采用DFT方法對各參數軌跡靈敏度進行頻域變換。由于仿真誤差存在敏感頻點,對于軌跡靈敏度的頻譜,應將其在敏感頻點處的幅值作為關鍵特征。該幅值表示軌跡靈敏度曲線在敏感頻點處頻率成分的含量,體現了參數對敏感頻點處的影響能力,即對誤差的主要頻率成分的影響能力。誤差頻譜和靈敏度頻譜可能含有多個敏感頻點,各個敏感頻點的幅值均需關注。
需要指出的是,軌跡靈敏度的頻域變換和頻域靈敏度是完全不同的2 個概念。前者描述動態系統參數對其動態行為響應軌跡的靈敏度,動態系統既可以是線性的也可以是非線性的;后者描述線性系統中參數對傳遞函數頻域響應的靈敏度[17]。對于線性系統,二者存在如式(8)所示的關系。

其中,Yi為軌跡靈敏度的頻域變換;Hi為傳遞函數靈敏度;U 為輸入變量的頻域變換;f*為頻率。此時可以通過頻域靈敏度換算得到軌跡靈敏度的頻域變換結果。對于非線性系統,二者本質上是不同的,擾動越大,二者計算結果差別也會越大。
2.4 頻域特征指標及誤差評價指標
靈敏度頻譜在多個敏感頻點處的幅值可能不同,表明參數對各敏感頻率分量的影響能力不平衡。誤差頻譜的各敏感頻點幅值也不同,表明誤差中所含各敏感頻率分量同樣存在差異。在選取主導參數時,應準確衡量各幅值的作用,既要考慮幅值的總體作用,也應使主導參數的影響能力與誤差的各敏感頻率分量相適應。為此,本文定義了平均幅值指標,以衡量參數對敏感頻率成分的總體影響能力;定義了幅值比指標,以衡量這種影響能力的不平衡。
對于某一頻譜,平均幅值指標-M的定義由式(9)給出。

幅值比指標Rij的定義由式(10)給出。

其中,Mj為頻譜中第j 個敏感頻點幅值。參數軌跡靈敏度的幅值比指標Rα,ij體現了參數α 對各敏感頻點影響能力的比例關系;誤差的幅值比指標Re,ij體現了各敏感頻點頻率成分的含量關系。若二者的數值相近,說明參數對軌跡的影響符合誤差的頻率成分比例。當調整該參數時,能同步削減誤差各頻率分量。若頻譜含有多個敏感頻點,則有多個幅值比指標,其中較重要的指標是誤差中頻率分量較大的主要敏感頻點的幅值比。
為定量評估仿真誤差的大小,引入整體能量誤差指標E[18],定義由式(11)給出。
3 主導參數集的識別方法
3.1 主導參數集的識別流程
參數校正的目標是合理調整參數值,使仿真結果與實測數據的誤差減小。因此,首先應分析仿真結果與實測軌跡誤差的頻域特征,提取敏感頻點fi,并計算誤差頻譜的幅值比指標Re,ij。
式(7)描述了誤差和參數軌跡靈敏度的時域關系。頻域上,誤差的敏感頻點及其幅值也是由參數軌跡靈敏度造成的。因此,應分析各參數軌跡靈敏度的頻域特征(特別是對誤差敏感頻點的特征),提取敏感頻點幅值Mα,i。
顯然,通過有效補償誤差的敏感頻率成分可以顯著減小仿真結果與實測數據的不一致。在此原則下,考察各參數軌跡靈敏度的頻域特征。按參數軌跡靈敏度在各誤差敏感頻點的幅值大小排序,并與各敏感頻點的閾值T1,i進行比較。如果參數α 至少存在一個不小于閾值T1,i的敏感頻點幅值,則將其作為候選參數。候選參數集Ωc的定義如式(12)所示。



根據參數軌跡靈敏度特征、計算能力及時間要求等條件,確定主導參數數量Nd。按式(13)從小到大排序,選取前Nd個參數,即可得到誤差的主導參數集Ωd。
主導參數集的識別流程如附錄中圖A1所示。
3.2 閾值和主導參數數量的確定
閾值的選取對主導參數的有效性有重要影響,并且將間接影響到參數校正的效果。閾值T1,i和T2的設置是為了排除低效參數,減小計算成本。綜合上述分析,可由式(14)確定閾值。
系數k1和k2的選擇一方面與系統規模、受擾條件、目標軌跡下參數對軌跡的靈敏度頻域特性都有關,另一方面需考慮主導參數的數量。本文將k1和k2設為5%,取得了較好的篩選效果。
對于主導參數數量的選擇,應注意主導與非主導參數之間并無理論上的明確劃分。但一般認為當某些參數的軌跡靈敏度特征明顯高于其他參數(數量級上的差別或數倍的差別)時,可將其作為主導參數。當然,從參數校正的可實現性角度出發,主導參數的數量不宜過多,否則可能出現無法校正的問題。
4 算例分析
4.1 算例條件
以基于PSAT 仿真工具[19]的WSCC 3機9節點系統為例進行仿真分析,其結構見圖2。在節點8設置三相短路故障,初始時刻開始,0.1 s后結束。同步機采用四階模型,勵磁器采用PSAT 中Ⅱ型勵磁器模型,負荷采用恒功率加頻敏負荷模型(設頻敏負荷率為有功占30%、無功占80%)。文獻[20]給出了用頻敏負荷表示感應電機的參數值,算例采用該組參數值來表示負荷中的感應電機部分。
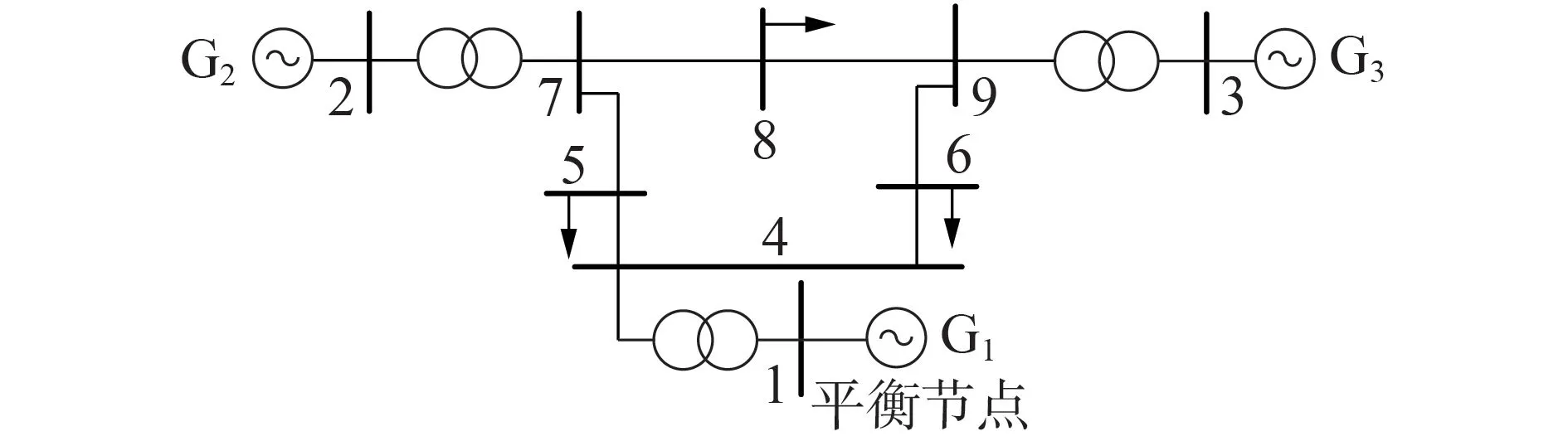
圖2 WSCC 3機9節點系統圖Fig.2 Diagram of WSCC 3-machine 9-bus system
WSCC 3機9節點系統共有21個同步機參數、27個勵磁器參數、6個頻敏負荷參數,按附錄中表A1對系統的部分參數進行攝動,使得攝動前后系統模型參數產生誤差。表中,SYN表示同步機參數,EXC表示勵磁器參數,FL 表示頻敏負荷參數,其下標所示的數字編號表示元件所在節點。同步機中,TJ為慣性時間常數;X'd為d軸暫態電抗;Xq為q軸電抗;X'q為q軸暫態電抗。勵磁器中,Ke為磁路積分偏差。負荷中,Kq為頻率敏感型無功負荷占比;Kp為頻率敏感型有功負荷占比。
將攝動前的參數作為未知的系統真實參數集,其仿真結果作為實測結果;將攝動后的參數作為已知的現有模型參數進行仿真。在此情況下,計算軌跡靈敏度,通過頻域特征提取確定主導參數集。對主導參數集進行參數校正,并驗證所選主導參數集的合理性。
對于觀測量的選取,理論上可選取電壓、電流、頻率、功率、功角、角速度等觀測量。但從廣域測量系統WAMS(Wide-Area Measurement System)量測數據的有效性出發,只有電壓、電流的幅值和相角是直接實際測量得到的,有功功率和無功功率均是在此基礎上計算得到的,而發電機功角、角頻率通常不是直接測量得到的。其次,在同一擾動下,應選擇軌跡誤差大、動態行為激發充分的觀測量,以充分體現參數的作用。在該小系統中,觀測量的動態行為激發都比較充分。另外,所選觀測量應是運行人員比較關注的、對系統安全有重要影響的變量。故障發生短期內不太關注頻率變化,電流亦不是系統分析中所格外關注的,通常關注的是有功功率和節點電壓。綜合以上3 點,本文選擇節點電壓幅值和有功功率為觀測量進行分析。
求取參數軌跡靈敏度頻譜有以下2 種方法:方法1是通過軌跡靈敏度直接進行頻域變換,方法2是通過傳遞函數進行頻域靈敏度換算(如式(8)所示),所用傳遞函數按文獻[17]所提方法得到。因擾動設定在節點8,故以節點8 電壓幅值為輸入變量,并以節點3 電壓幅值為輸出變量。圖3 對比了大擾動下(此處設三相短路故障時間為0.16 s)通過2 種方法得到的節點3 同步機參數X'd(SYN3-X'd)對節點3電壓幅值的參數軌跡靈敏度頻譜,圖中幅值為標幺值,后同。
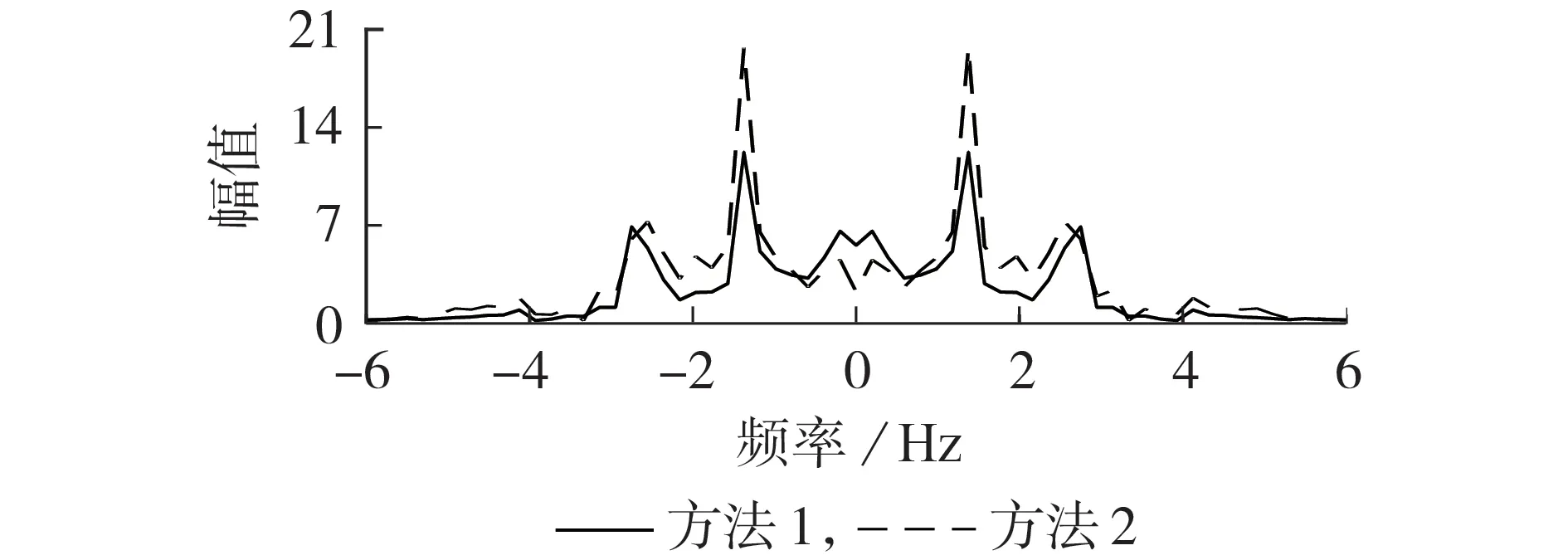
圖3 SYN3-X'd 對節點3電壓幅值的軌跡靈敏度頻譜Fig.3 Spectrum of trajectory sensitivity of SYN3-X'd to voltage amplitude at Bus 3
由圖3可見,2種方法獲得的頻譜第一峰值大小有較大差異,第二峰值頻點存在偏移。這是由于該系統是非線性系統,且在該擾動下不可進行線性化,而方法2 將該系統當作線性化系統進行處理,此時采用方法2 得到的頻譜是不準確的。為保證頻譜的準確性,應采用方法1 求取各參數軌跡靈敏度的頻譜。
4.2 頻域分析和主導參數識別
首先,以有功功率為觀測量進行分析。計算節點3仿真與實測有功功率的誤差并進行頻域變換,其變換結果見圖4。可見該有功誤差頻譜有2 個明顯的峰值,以峰值所在頻點為誤差頻譜的2 個敏感頻點,仿真誤差的幅值比指標為3.67。
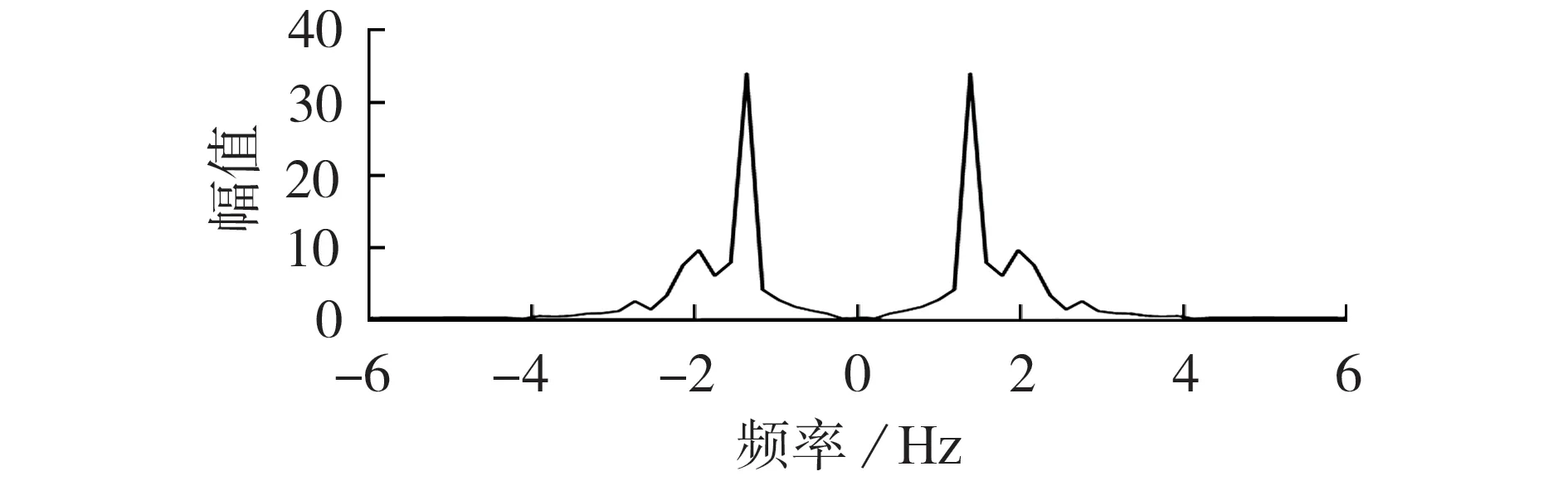
圖4 節點3有功功率誤差頻譜Fig.4 Spectrum of active power error at Bus 3
然后,計算系統中各參數對節點3 有功功率的軌跡靈敏度。對參數軌跡靈敏度曲線進行頻域變換,從所有參數的軌跡靈敏度頻譜中提取敏感頻點的幅值。按照第3 節所提方法,得到候選參數集,并計算候選參數集中各參數的平均幅值指標和幅值比指標。按式(13)計算幅值比指標與誤差的幅值比指標的差值,并進行排序,其中排在第六位的差值為1.66,而排在第七位的差值為2.89。可見,從第七位開始,差值大幅增加,因此選擇前六位參數為有功功率主導參數集。同理,對電壓幅值進行分析,發現從第五位開始差值集中在1.15 附近,與前四位的數值特征明顯不同,因此選取前四位參數為電壓主導參數集。綜上,節點3 有功功率和電壓幅值的主導參數集如表1所示。
經對比發現,表1中2個觀測量的主導參數集并不完全一致,僅有3 個共有參數。由于特定參數對于不同觀測量的影響效果是不同的(即某些參數與有功強相關,而另一些參數與電壓強相關),因此不同觀測量所識別的主導參數集也可能不同,這是合理的。此時應對各主導參數集分別進行校正,并比較校正效果,再將多組主導參數集合并為一組整體效果較好的最終主導參數集,以提高主導參數識別的有效性。

表1 節點3有功功率和電壓幅值的主導參數集Table 1 Dominant parameter sets of active power and voltage amplitude at Bus 3
采用試錯法[10]分別對有功功率和電壓幅值的主導參數集進行參數校正。以式(11)所示的整體能量誤差指標E 為目標函數,并用其衡量校正前、后的仿真誤差,如表2所示。
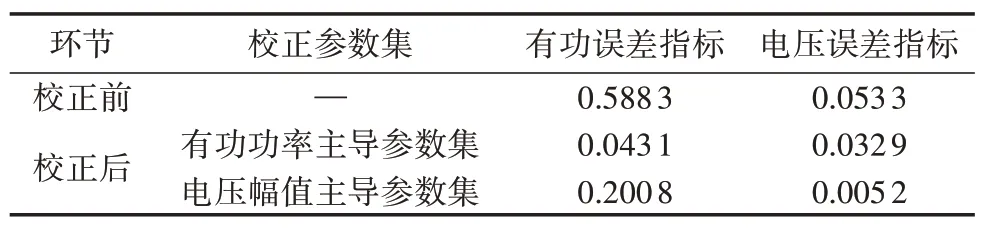
表2 兩觀測量主導參數集校正前、后整體能量誤差指標Table 2 Overall energy error indicator before and after calibration of dominant parameter sets for two observations
由表2 可知,校正有功功率主導參數集后,有功誤差指標減少了92.7%;校正電壓幅值主導參數集后,電壓誤差指標減小了90.2%。可見,兩主導參數集確為各自觀測量的主導參數集。本文采用的主導參數集合并方法如下:對于各參數集的獨有參數,保留其校正值,并在此基礎上對共有參數重新進行校正,校正仍采用試錯法。由于校正的是兩觀測量的共有參數,在設定目標函數時,兩觀測量的仿真誤差都應得到體現,即有功和電壓各自的仿真誤差應按照一定比例折算到目標函數中。若同等對待有功功率和電壓,可設置目標函數如下:

其中,EP為有功整體能量誤差指標;EV為電壓整體能量誤差指標。
以該目標函數對共有參數進行校正,并獲得共有參數的校正值,得到包含所有參數的最終主導參數集如表3 所示。表3 還列出了采用傳統的軌跡靈敏度最大值排序方法識別的主導參數集。得到參數校正值見表4,表中X'd、Xq均為標幺值。

表3 用2種方法識別的主導參數集Table 3 Dominant parameter sets identified by two methods
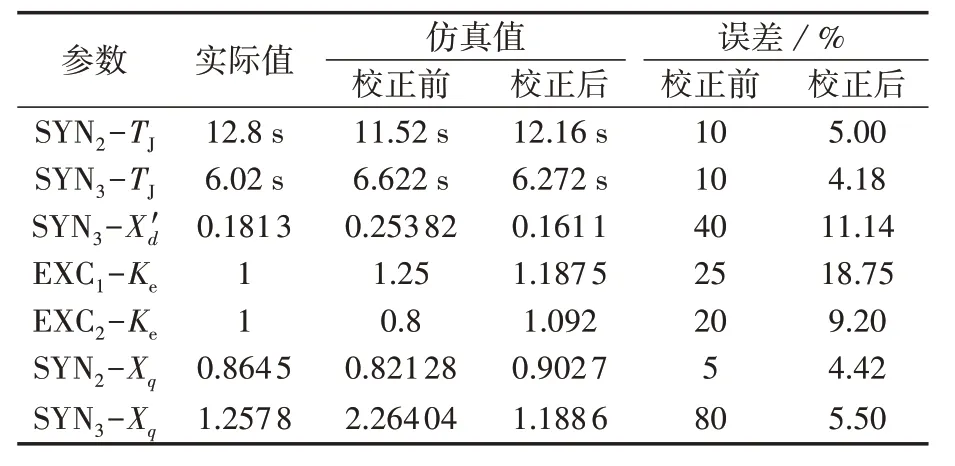
表4 最終主導參數集校正結果及誤差Table 4 Calibration results and errors of final dominant parameter sets
4.3 主導參數集的合理性
由表4 可見,與校正前相比,最終主導參數集中校正后參數誤差均大幅減小,參數值的準確性顯著提高。
最終得到主導參數集校正前、后仿真結果對比如圖5 所示,取穩態有功功率為0.85 p.u.,穩態電壓幅值為1.025 p.u.。圖中,P和V均為標幺值。
由圖5 可見,與校正前相比,有功功率和電壓幅值在校正后仿真結果與實測數據之間不一致性明顯減小。以式(11)的整體能量誤差指標衡量校正后仿真誤差,有功誤差指標為0.066 3,與校正前(見表2)相比減小了88.73%;電壓誤差指標為0.001 9,與校正前相比減小了96.44%。由圖5 及上述指標可知,校正后仿真有效性顯著提高。
對傳統方法識別的主導參數集同樣采用試錯法進行參數校正,并使用校正后的模型參數進行仿真,與本文方法識別的最終主導參數集校正后仿真結果進行對比,如附錄中圖A2 所示,有功和電壓穩態值同上文。圖中,P和V均為標幺值。仍以整體能量誤差指標衡量仿真誤差,傳統方法識別的主導參數集校正后有功誤差指標為0.271 3,電壓誤差指標為0.053 9。與之相比,本文方法識別的最終主導參數集校正后有功誤差指標減小了75.56%,電壓誤差指標減小了96.47%。由附錄中圖A2 及上述指標可見,與傳統方法相比,校正本文方法識別的最終主導參數集能更有效地減小仿真誤差,參數主導性更高。
綜上,本文方法識別的主導參數集經校正后參數準確性、仿真有效性均顯著提高;與傳統方法相比,主導參數識別的準確性顯著提高,所得主導參數集的主導性更高。
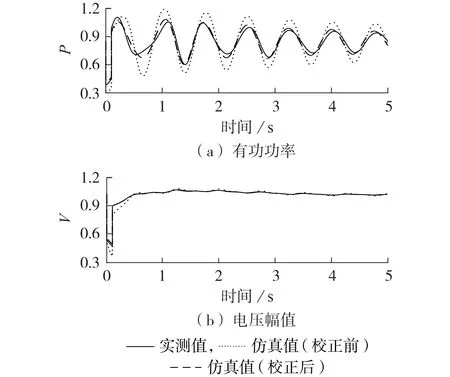
圖5 校正前、后節點3觀測量對比Fig.5 Comparison of observations before and after calibration at Bus 3
5 結論
針對電力系統仿真誤差主導參數識別問題,本文提出基于軌跡靈敏度頻域特征提取的主導參數識別方法,從頻域角度揭示了軌跡靈敏度對電力系統動態行為的影響。與傳統方法相比,所提方法充分挖掘軌跡靈敏度中蘊含的頻域特征信息,為主導參數識別提供了新思路,間接改善了模型參數校正效果。后續研究將對各參數軌跡靈敏度頻域特征進行深入挖掘,進一步提取參數對軌跡特征影響的信息,為實現仿真驗證的可解釋性提供理論指導。
附錄見本刊網絡版(http://www.epae.cn)。
