平抑新能源功率波動的聚合溫控負荷改進模型預測控制
2021-03-29 06:06:44賈雨龍米增強
電力自動化設備 2021年3期
余 洋,權 麗,賈雨龍,米增強
(1. 華北電力大學 新能源電力系統國家重點實驗室,河北 保定071003;2. 華北電力大學 河北省分布式儲能與微網重點實驗室,河北 保定071003)
0 引言
間歇式新能源的大規模并網給電力系統維持電源與負荷間的功率平衡帶來了挑戰[1]。通常,由火電等可控電源提供電力系統輔助服務,以維持系統安全穩定運行,但這一方面降低了系統運行效率,另一方面火電機組的深度調峰也增加了系統運營成本。兼具虛擬儲能和靈活調度兩大特性的“碎片”化需求側資源,如空調、冰箱和電熱水器等溫控負荷TCL(Thermostatically Controlled Load)以及電動汽車等[2],大量聚合后有著較大的調節潛力,成為了需求側為電網提供輔助服務的一種選擇。相關研究表明,聚合溫控負荷ATCLs(Aggregated Thermostatically Controlled Loads)具有儲能容量大、響應快速等優點,被認為是維持功率平衡的有效手段之一[3]。
目前,已有一些關于TCL 等需求側資源提供電網輔助服務的相關研究,如:文獻[4]通過對ATCLs溫度設定值的控制,實現了智能電網中的頻率調節服務,并利用極值搜索對控制器參數進行了優化;文獻[5]提出一種利用ATCLs 進行清潔能源消納的滑模變結構控制方法,并利用熱感覺投票對溫度設定值結果進行人體舒適度評價。然而,這些研究并沒有將用戶舒適性作為約束條件對溫度設定值的變化范圍加以限定。文獻[6]指出ATCLs 通過調整溫度設定值以響應電網調控信號的控制方法,可能會對用戶舒適度造成一定影響。為了平衡調控目標和用戶舒適度之間的關系,研究考慮用戶舒適性約束條件的ATCLs調控策略有著重要的現實意義。
考慮輸入約束的ATCLs控制方法有粒子群優化算法[7]、能效電廠建模技術[8]和模型預測控制MPC(Model Predictive Control)等。相比于前2 種方法,MPC由于對顯式約束有著較強的處理能力而得到了廣泛應用。文獻[9]建立一種TCL 的二維狀態箱模型,采用MPC 對ATCLs 功率進行調節,為電網提供輔助服務。文獻[10]提出一種MPC 實時調度方法,利用電動汽車入網V2G(Vehicle to Grid)技術下電動汽車充放電的靈活性來平抑光伏出力波動。文獻[9-10]基于MPC,用預測值和參考值定義的代價函數最小化求得最優控制信號,采取滾動優化的方法對每個采樣時間的預測值評估成本函數,并選擇使成本函數最小化的控制序列應用于下一個采樣時間段,因此,對于考慮多種約束條件的復雜系統能夠達到最優控制[11]。然而,傳統MPC 每次采樣都會重復優化,需要大量的計算,帶來了一定的執行延時,可能會降低控制性能,而且關于MPC 用于電力系統調度,大多數研究采用集中式MPC CMPC(Centralized MPC),集中式控制高度依賴通信環境,在實際非理想條件下存在通信延遲、控制效果較差等問題[12]。另外,電力系統的不確定性因素以及不同TCL 聚合體參數的差異性,會導致現有MPC 的預測結果與實際值出現偏差,將求得的控制律應用于實際TCL 功率控制時,可能無法準確跟蹤功率偏差信號,導致系統性能變差甚至產生系統失穩的后果。
針對上述問題,本文提出一種考慮人體熱舒適性約束、基于Lyapunov 函數改進MPC 的ATCLs 平衡新能源功率波動的控制方法。該方法利用人體熱舒適評價指標預測平均投票PMV(Predicted Mean Vote)和預測不滿意度PPD(Predicted Percent Dis‐satisfied),在人體熱舒適區內確定溫度設定值的上下限作為控制變量約束;然后利用ATCLs 雙線性模型,使用基于Lyapunov 函數的分布式MPC DMPC(Distributed MPC)方法調節ATCLs 以平衡功率偏差,同時降低非理想通信環境影響并縮短控制器執行延時,保證控制的穩定性和魯棒性。算例表明,本文方法在滿足用戶舒適度的前提下,能改善系統控制性能,準確跟蹤參考功率,抑制新能源功率波動。
1 人體熱舒適性評價指標
舒適度是人在環境中對冷、暖、熱等熱感覺的主觀描述。當人體體溫保持在狹小范圍內變化,人體達到一個熱平衡時,心里感到愉悅,被稱為熱舒適。顯然人體熱舒適是隨個體變化的,其中溫度變化是熱舒適性的一個重要影響因素。PMV 是從統計學角度定義的一種熱舒適性評價指標,包含美國采暖制冷與空調工程師學會(ASHRAE)的7 級量表,其值在-3~3范圍內變化,表示7種熱感覺[13];PPD表示居民對熱環境不滿意的百分比[14]。2個指標計算式為:

其中,CPMV和CPPD分別為熱舒適性指標PMV 和PPD;M為人體代謝率;TL為人體產熱和散熱的熱量差,具體計算公式見附錄中式(A1)。
此外,國內氣象部門也有一些關于人體舒適度指標的描述,常用的計算方法見附錄中式(A2)。
本文以空調型TCL 為研究對象,首先研究室內空調用戶熱舒適區的可接受溫度波動范圍。已有研究表明,室內空調環境下的人體熱舒適性與室內溫度和濕度有著密切聯系,因此,本文確定的主要影響因素即為室內溫度和相對濕度。假設室內人處于靜坐或者輕微體力勞動狀態,基本新陳代謝率為60 W/m2,夏季在室內時衣著較輕薄,可假設服裝熱阻約為0.47 clo。本文采用PMV 和PPD 作為熱舒適性評價指標,通過式(1)、(2)得到的PMV和PPD分別見圖1 和圖2。圖1 中,PMV 與室內溫度的回歸方程為y=0.255 14 x?6.793 8,其相關系數H2=0.929 7。
根據ISO7730 最新規定,通常將PMV 在-0.5~0.5范圍內變化、PPD 至少小于10%的環境認為是滿足用戶(超過90%)熱舒適性的,從而能確定溫度設定值的上下限[15]。由圖1和圖2知,CPMV=0的溫度值約為27 ℃,確定夏季室內舒適溫度范圍為25~28 ℃。
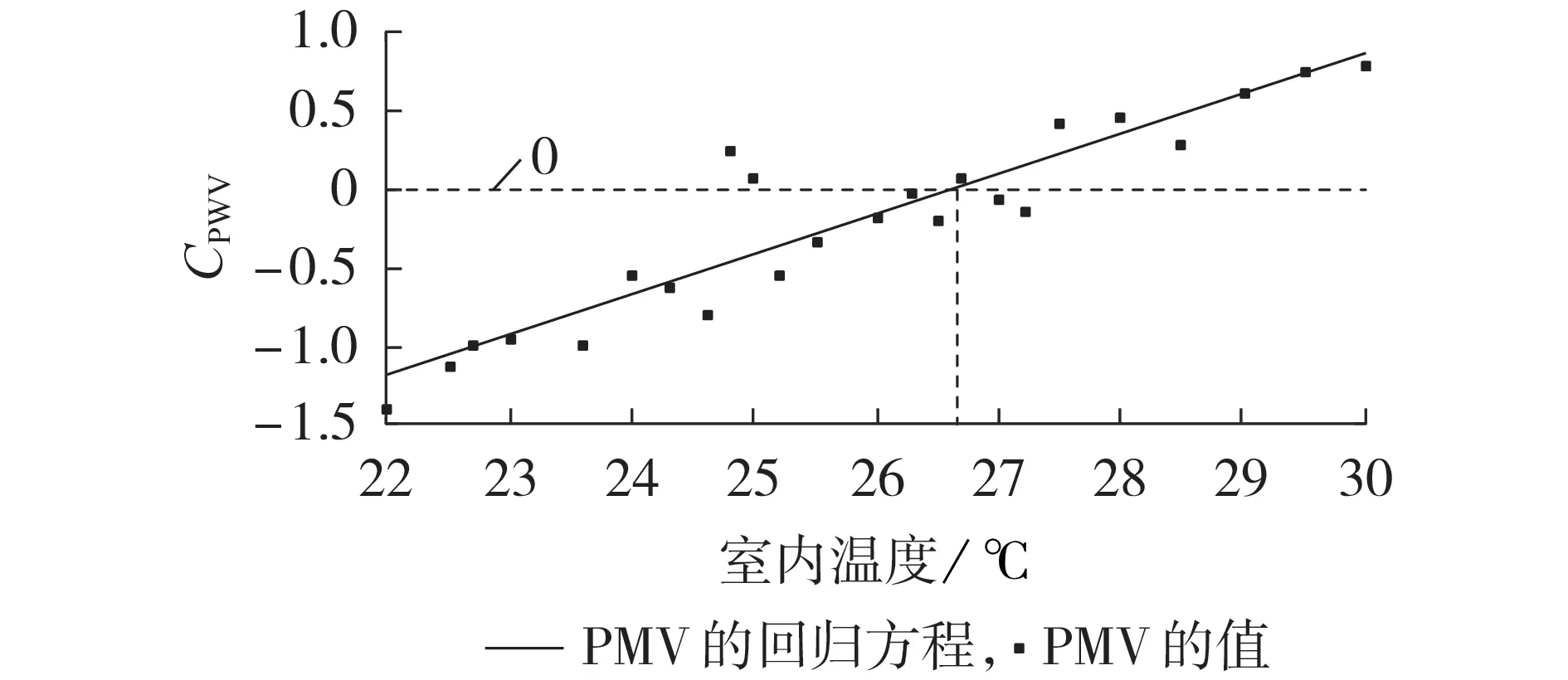
圖1 夏季室內不同溫度下的PMVFig.1 PMV at different indoor temperatures in summer
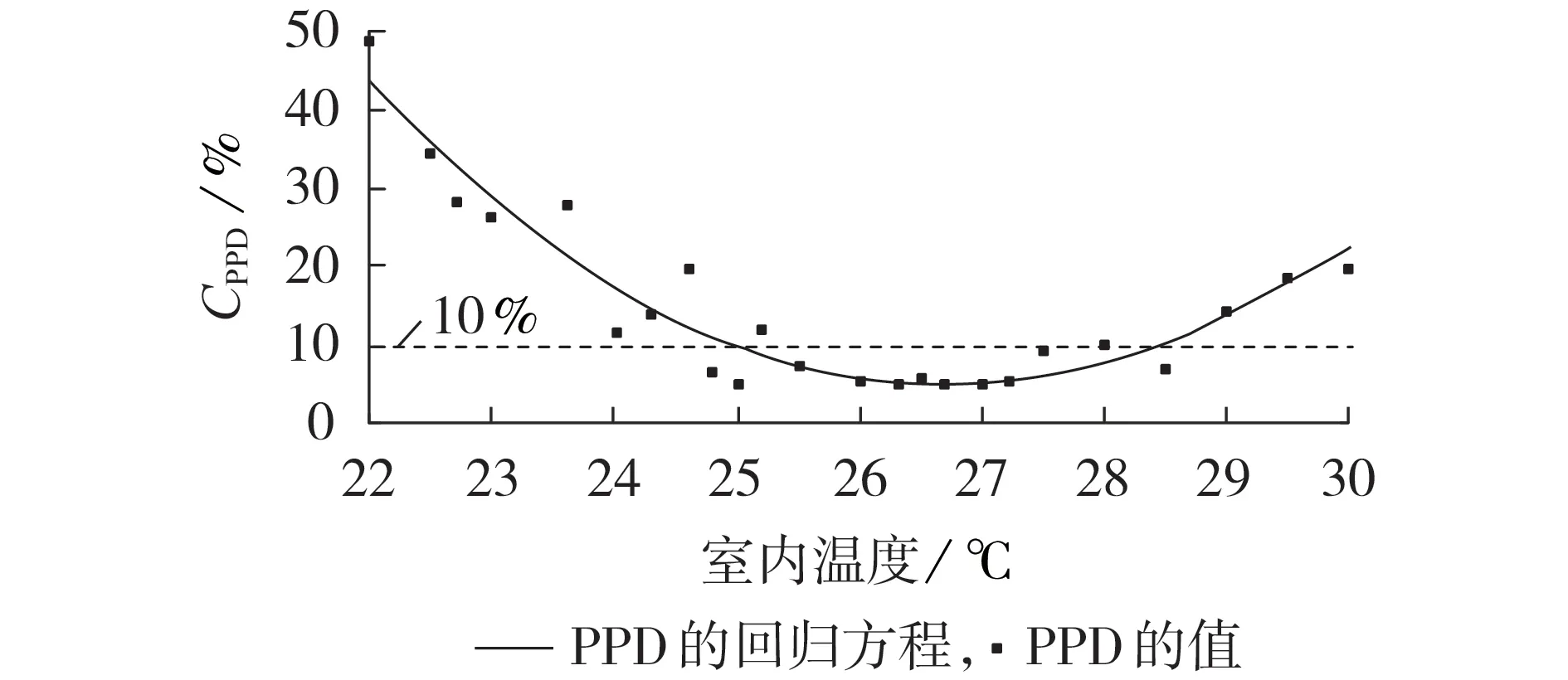
圖2 夏季室內不同溫度下的PPDFig.2 PPD at different indoor temperatures in summer
本文利用實驗的方法,通過被試人群的主觀評價來確定調度時間段內每2 次調節間人體可接受的溫度波動范圍。實驗中溫度變化周期為10 min。被試人員在距空調出風口垂直距離2.5 m 的位置感受空調溫度波動。室內溫度在25~28 ℃范圍內變化時,可接受的溫度波動實驗結果為:室內溫度分別為25、26、27 ℃時,2 次調節間可接受溫度波動均為0.5 ℃;室內溫度為28 ℃時,溫度波動為0.4 ℃。
在每2 次調節之間,人體可接受的溫度變化范圍影響著ATCLs的運行。在對ATCLs進行控制從而響應電網信號時,會對TCL設備初始溫度設定值(用戶期待設定溫度)進行調節,控制變量一般為溫度設定值的變化量。為保證控制時段內能夠滿足用戶的舒適度要求,就需要對控制變量進行一定的約束。
結合圖1、2 及溫度波動實驗知,夏季室內人體熱舒適溫度為25~28 ℃,在此范圍內對TCL 設備溫度設定值調節的過程中,每2 次調節間用戶可接受的最大溫度波動范圍為0.5 ℃,將該值作為控制變量約束限值,保證控制時段內人體熱舒適性不受影響。
2 TCL聚合模型
2.1 單個TCL熱動態模型
對于第i個制冷型TCL,其等效熱參數模型為[16]:

其中,Ti(t)和Ta,i(t)分別為t 時刻第i 個TCL 所處室內溫度和室外溫度;Ci和Ri分別為第i個TCL等效熱容和等效熱阻;Pi為第i 個TCL 開狀態時的功率;mi(t)為第i 個TCL 的開關狀態用二元變量,其表達式如式(4)所示。
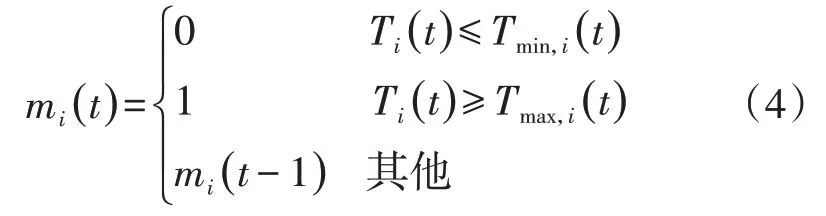
其中,Tmax,i(t)和Tmin,i(t)分別為第i 個TCL 溫度限制的上、下限,二者形成溫度死區[Tmin,i,Tmax,i],在死區內負荷開關狀態不變,溫度到達死區邊界時,開關狀態發生改變。Tmax,i(t)和Tmin,i(t)滿足如下條件:
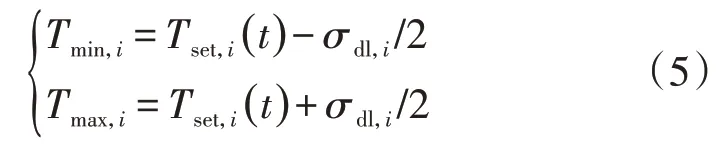
其中,σdl,i為第i 個TCL 溫度死區寬度;Tset,i(t)為第i個TCL溫度設定值,其表達式如式(6)所示。
其中,Tset,0為起始溫度設定點;ΔTset(t)為相對起始溫度設定點的溫度增量,考慮用戶舒適度約束,設置其上限ΔTset,max,使ΔTset(t)在熱舒適區溫度范圍內波動。
集總式TCL負荷平均功率表達式為:

其中,ηi為第i個TCL效率系數;N為溫控負荷數量。
2.2 TCL雙線性聚合模型
上述熱力學參數模型表示的集總式TCL雖然可以較為準確地描述TCL 集群的用電行為,但應用于控制時會存在2 個問題:第一,模型中既有連續狀態變量(溫度),又有離散的開/關狀態變量,很難直接用于控制設計;第二,若把每個TCL表示為一組獨立的微分方程,則將該模型應用于電網級需求響應時會面臨“維數災”問題[17]。
為解決上述問題,文獻[18]提出一種面向控制的ATCLs雙線性聚合模型,如式(8)所示。該模型假設所有溫控負荷都處于一個有限的溫度范圍[Tl,Th](Tl、Th分別為室內溫度最小、最大值)內,將整個溫度范圍離散化,ΔT 為離散化溫度長度,各離散溫度區間內均含“開/關”2 種狀態的TCL,共有L 個溫度狀態區間,各TCL屬于某確定的離散溫度狀態區間。

為方便使用,將每個溫度區間不同的負荷傳遞率近似取為起始溫度設定值下的負荷傳遞率,即:

其中,αon和αoff為矩陣A的元素,分別表示開、關狀態下的負荷傳遞率;R 和C 分別為平均熱阻和平均熱容。
3 基于改進MPC的功率平衡分布式控制方法
3.1 采用分布式控制的原因
CMPC方法中,由于控制中心與所有聚合體間都要建立通信網絡,會產生巨大的信息傳輸量,其良好的跟蹤效果依賴于高速、有效和安全的通信系統。與CMPC相比,DMPC無需各聚合體都與控制中心取得聯系,一些聚合體以相互的本地通信替代控制中心與所有聚合體間的上下層通信,降低了對通信系統的要求,減少了信息傳輸量,且縮短了通信延時。
另外,在CMPC 中,所有TCL 聚合體會收到同一最優溫度調節量控制信號,依此來完成目標跟蹤。而在DMPC 中,不同區域的TCL 聚合體可根據負荷聚合商所分配的功率自適應跟蹤目標,計算獲得不同的最優溫度調節量作為控制信號,在完成目標跟蹤任務的同時,能夠更好地滿足用戶舒適性要求。
綜上所述,本文將采用基于DMPC 的ATCLs 控制來提供負荷功率平衡服務,以此降低非理想通信環境的影響,減少信息傳輸量,并且在保證良好目標跟蹤效果的同時,減少對用戶舒適性的影響。
3.2 模型預測控制器延時分析
理想情況下,忽略模型預測控制器系統延遲,模型預測計算瞬間完成。k 時刻計算得到保證k+1 時刻最優的控制信號,并立刻作用于k時刻,使得k+1時刻輸出功率與參考信號的誤差最小,達到最佳控制精度[19]。然而,實際模型預測控制器系統大多利用預測值和參考值定義的代價函數最小化求得最優控制信號,通過滾動優化對各采樣時間的預測值評估成本函數,并選擇使成本函數最小的控制序列應用于下一個采樣時間段。因每次采樣都會測量新數據,且重復上述優化需大量計算,造成一定的延時,故測量時刻與最優控制信號間存在一定的時間間隔。在控制器計算過程中,系統持續應用上一個控制信號而非最優控制信號。如附錄中圖A1所示,由于得出計算結果需一定的時間,k時刻并沒有及時更新最優控制信號,而是繼續沿用上一個采樣周期的控制信號,導致輸出功率偏移參考值,影響系統控制性能。
基于Lyapunov 函數的MPC 直接利用Lyapunov函數確定最優控制律,替代傳統MPC 利用最小化成本函數優化得到控制信號的方法,從而降低計算量,縮短執行延時,改善控制性能,且采用直接Lyapunov函數方法保證了控制的穩定性。傳統DMPC 方法的流程圖見附錄中圖A2。圖3 為基于Lyapunov 函數的改進DPMC 方法的流程圖。圖中,y(k)、e(k)和u(k)分別為k 時刻所有聚合體的總輸出功率、跟蹤誤差和控制輸入;y(k+1)和yref(k+1)分別為k+1 時刻總輸出功率和參考功率;ε為要求的跟蹤精度。
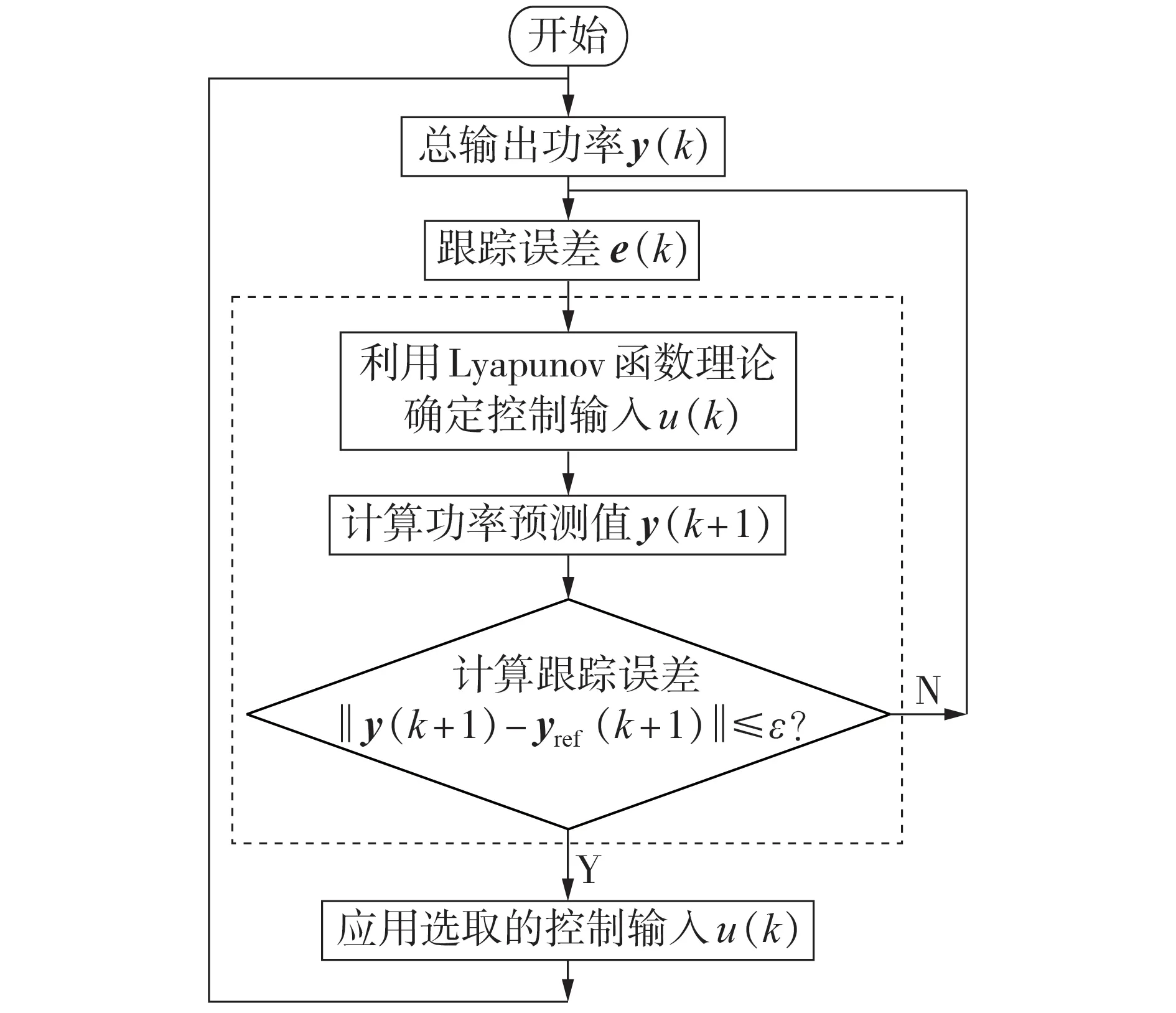
圖3 基于Lyapunov函數的改進DPMC的流程圖Fig.3 Flowchart of improved DMPC based on Lyapunov function
3.3 基于Lyapunov函數的DMPC實現
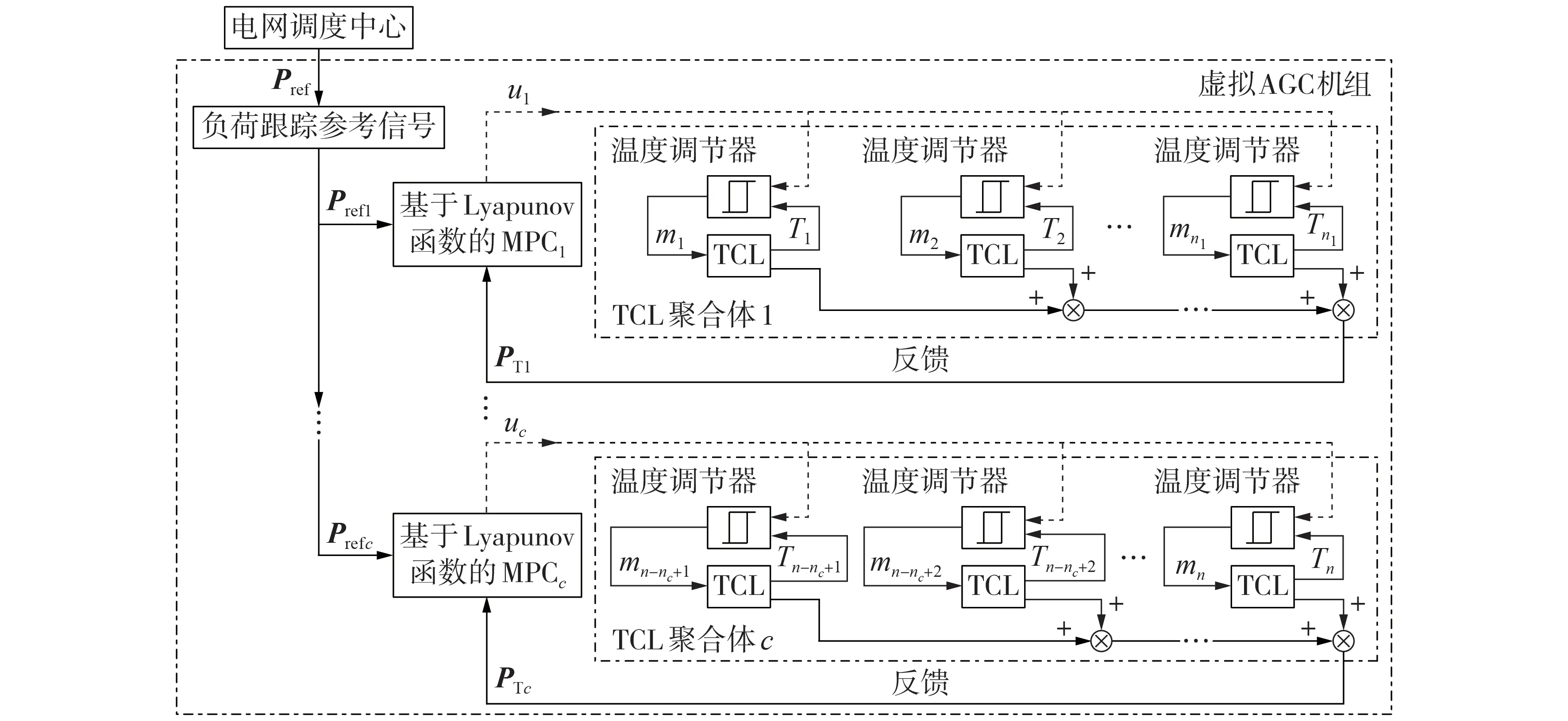
圖4 ATCLs的DMPC方案Fig.4 DMPC scheme of ATCLs
3.3.1 控制器設計
基于Lyapunov 函數的DMPC 方案見圖4。實施時,所有ATCLs 作為一個整體來響應電網調度的二次調頻指令。對電網調度而言,可將ATCLs 當作一臺虛擬自動發電控制(AGC)機組,與其他常規機組一起完成調度的二次調頻任務。另外,在故障等緊急情況下,為與現有的低頻或低壓減載裝置配合,可根據電力公司與負荷聚合商事前協議,在成本可行的前提下,調度可考慮優先切除溫控負荷,然后再使用原有的低頻或低壓減載措施,直至系統頻率恢復到允許范圍內。假設某一區域內有c 個TCL 聚合體,共包括n 臺TCL 設備,ni為第i 個聚合體負荷數量,n=n1+n2+…+ni+…+nc。第i個TCL聚合體的控制信號ui由其模型預測控制器產生,監測其輸出功率PTi并反饋到模型預測控制器對預測模型進行優化,其需跟蹤的功率參考信號為Prefi=wiPref,Pref為需調節的調度功率指令,wi=niPi/PTZ為第i個TCL聚合體可調功率占溫控負荷總可調功率PTZ的比重,Pi為第i 個聚合體單臺TCL 設備功率。預測模型采用第2 節中的ATCLs 雙線性狀態空間模型。該區域ATCLs總功率為:

針對第i個TCL聚合體,基于Lyapunov函數的模型預測控制器設計如下。
(1)建立預測模型。ATCLs 的離散化雙線性狀態空間方程為:

其中,xi(k)、ui(k)、PTi(k)、Ali、Bli和Cli分別為第i 個TCL 聚合體的式(8)中X(t)、u(t)、PT(t)、A、B 和C 離散化后的形式,Ali=I+τAi,Bli=τBi,Cli=Ci,τ為采樣步長,I為L×L階單位陣。
(2)滾動優化。對于k+1 時刻,期望輸出能夠跟蹤上參考信號,因此目標函數可以寫為:

定義Lyapunov函數如下:

Lyapunov函數的變化率為:

將式(12)、(13)代入式(16)可得:
為控制輸出功率能準確跟蹤參考信號,Lyapunov函數的導數應為負定的,可令:

其中,λ 為控制增益,將式(17)代入式(16)可得λ 的取值范圍為?1≤λ≤1。
根據式(18),可得到最優控制量的表達式為:

上述基于Lyapunov 函數對傳統的MPC 方法進行了改進,所提出的改進MPC 直接給出了最優控制律的表達式,由于經過了嚴格的穩定性證明,所提出的控制律每步均能保證控制的收斂性。
模型預測控制器的輸入為溫度設定值的變化量,對于每一個TCL集群而言,要在滿足用戶舒適度要求的前提下響應電網的控制指令,故每個時間段內溫度設定值的變化量都應限定在人體熱舒適區內,則輸入變量ui(k+τ)的約束條件為:

其中,ΔTsetmi為第1 節中2 次調節間可接受溫度波動0.5 ℃。
(3)反饋校正。由于輸出功率預測存在誤差,將輸出功率反饋到模型預測控制器對預測模型進行優化。
3.3.2 控制器魯棒性分析
實際中,負荷側TCL參數可能有一定的差異,且發電側也存在不確定性,控制器須有足夠的魯棒性,以保證在外部擾動下也能實現對參考信號的準確跟蹤。為分析基于Lyapunov函數的分布式模型預測控制器的魯棒性[20],將式(12)代入式(13)并將控制模型重寫為:

其中,M=ClAl,W=ClBl,y=PT,Al、Bl和Cl分別為式(8)中A、B 和C 離散化后的形式,Al=I+τA,Bl=τB,Cl=C。
將式(12)、(13)代入式(19)并重寫為:

其中,yr=Pref;e(k)=|yr(k)?y(k)|。
由式(23)變換可得:

由于?1 ≤λ ≤1,從而根據式(24)可得:

由式(25)可知,上述基于Lyapunov 函數的分布式模型預測控制器滿足魯棒性要求。



由式(27)可知,控制器輸出功率與參考信號之間的偏差小于等于兩項之和,第一項是標準偏差項,第二項是不確定項。對不確定項存在如下約束:

其中,ν為常數且ν>0。
為保證控制器在TCL參數變化時有較好的魯棒性,式(27)的“≤”號右側項應小于等于|yr(k)?y(k)|,將式(28)代入式(27)可得:
式(30)表明,控制器僅選擇實現最小功率跟蹤誤差的控制變量,并且以式(30)替代式(25)可確保所提控制器對于TCL參數不確定性同樣具有魯棒性。
4 算例仿真與分析
為驗證本文所提方法的有效性,基于文獻[17],采用含有清潔能源發電、常規能源發電機組、不可控負荷和ATCLs 的小型電力系統。如圖5 所示,常規能源為G1—G3這3 臺發電機組,清潔能源包括1 座風電場和1座光伏電站,聚合體有5個。依據聚合體之間的通信拓撲結構,0 為控制中心,只和聚合體1進行聯系,其余聚合體之間利用相互的本地通信替代控制中心與所有聚合體之間的上下層通信,并且若聚合體3和聚合體2的通信斷開,仍然可以通過與聚合體4的聯系獲得控制信息參與調控。
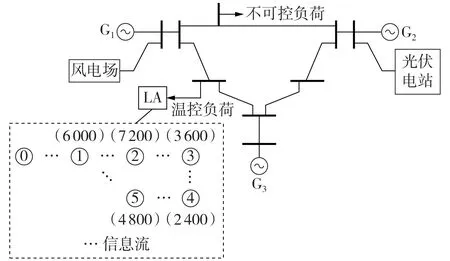
圖5 算例系統示意圖Fig.5 Schematic diagram of example system
根據調度中心發布的參考功率軌跡,該參考功率軌跡來自于文獻[17]。通過實施本文提出的功率調節跟蹤策略,利用ATCLs 實現控制信號跟蹤并平抑新能源注入帶來的功率波動。
選取某天中的07:00—11:00 時段進行仿真分析,該時段內發電功率和負荷需求功率數據見附錄中圖A3。由圖A3 可知,前2 h 系統的總負荷用電需求大于總發電功率,這是由于不可控負荷用電需求較大,即使調整了常規能源發電機組,由于新能源發電的隨機性,仍然無法滿足負荷需求,此時需要通過削減ATCLs 來達到發用電平衡;而后2 h,總發電功率則大于總負荷用電,這是由于新能源發電突增,遠大于負荷用電需求,此時可以通過增加ATCLs 功率對新能源發電進行消納,以達到供需平衡。
假設該區域中5 個TCL 聚合體共24 000 臺TCL設備參與負荷跟蹤的需求響應計劃,其中聚合體1—5分別為6000、7200、3600、2400、4800臺。TCL的參數從附錄中表A1取值范圍內用平均分布選取。
控制器的特征之一就是追蹤電網參考信號,為驗證本文基于Lyapunov函數的DMPC 的有效性和魯棒性,將考慮用戶舒適度約束的傳統CMPC 和傳統DMPC 作為比較方法。本文方法與比較方法輸出功率跟蹤功率偏差參考信號(期望ATCLs功率,即包含新能源的總發電功率減去不含TCL 負荷的需求功率)的曲線見圖6。由圖可知,本文方法和傳統DMPC方法均能較精確地跟蹤功率偏差參考信號,跟蹤效果明顯優于傳統CMPC方法。表1給出了傳統DMPC方法與本文方法的性能比較(表中λRMSE、λMAE分別為均方根誤差、平均絕對誤差),可見本文方法有更好的跟蹤效果,且能保證控制的穩定性。
不同控制方法下的控制信號見附錄中圖A4。由圖A4 可知,在傳統CMPC 方法中,紅色橢圓線圈出區域的最優控制信號一直處于溫度可調范圍的上邊界。這是由于傳統CMPC 方法中所有TCL 設備收到同一最優溫度變化量控制信號,在控制量到達可調范圍限值時,用戶舒適度約束使TCL 聚合體喪失調節能力。而本文方法和傳統DMPC 方法由于采用不同的控制信號,各TCL 聚合體的最優控制信號均能在可調范圍內調整,結果顯示,它們與可調范圍限值保持一定距離,能夠更好地保證用戶舒適度。
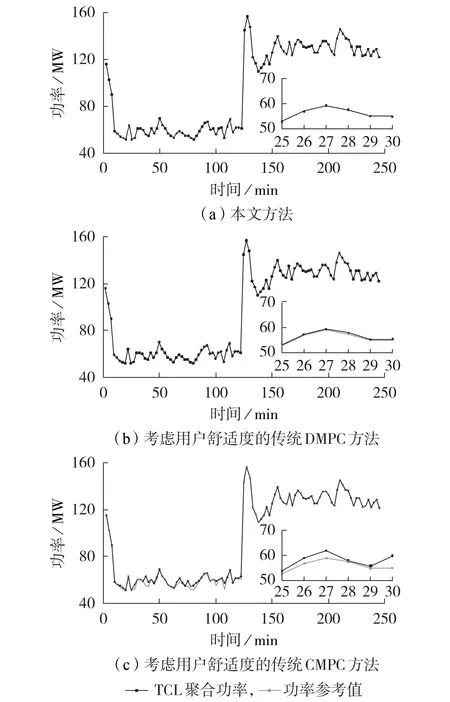
圖6 不同控制方法下輸出功率跟蹤參考信號曲線Fig.6 Output power tracking reference signal curve under different control methods

表1 傳統DMPC方法與本文方法的控制性能比較Table 1 Control performance comparison between traditional DMPC method and proposed method
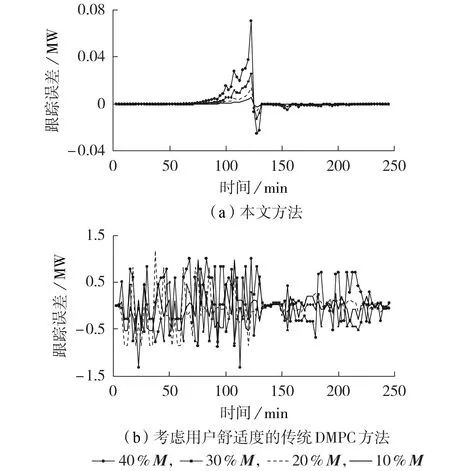
圖7 TCL參數不確定性下的魯棒性分析(在10%M~40%M內變化)Fig.7 Robustness analysis under uncertainties of TCLparameters(varies from 10%M to 40%M)
結合圖6、圖7、表1和附錄中圖A4可知,本文方法與傳統DMPC 方法均能有效跟蹤功率控制目標,與傳統DPMC 方法相比,本文方法的準確性和魯棒性更高,并且節省了大量的執行時間,進而縮短了執行延時,提升了控制性能,而且利用直接Lyapunov方法保證了控制的穩定性。
5 結論
本文通過PMV和PPD指標對人體熱舒適性進行分析,確定人體熱舒適區內溫度變化范圍,并將其作為控制信號的約束條件,提出一種考慮用戶舒適度、基于Lyapunov 函數的DMPC 方法,通過該方法調節ATCLs實現源荷間有功功率平衡。研究結論如下:
(1)本文提出的改進MPC 方法,由于采用直接Lyapunov 函數構建最優控制器,一方面避免了傳統MPC 的繁雜迭代尋優過程,有效縮短了控制器的執行延時,另一方面也保證了控制器的穩定性;
(2)為克服集中式控制的缺陷,改進MPC 方法采用的分布式控制策略能更準確地跟蹤負荷控制目標,跟蹤效果明顯更優,且考慮用戶舒適度的溫度調節方式能使90%的用戶滿意,不影響整體舒適度;
(3)本文方法能夠在不增加電源側調度負擔的前提下,利用負荷側ATCLs 平抑新能源注入引起的功率波動,提高了能源利用效率。
本文利用PMV 和PPD 指標整定得到溫控負荷溫度設定值變化范圍。由于人體對于小范圍溫度超限變化有一定的不敏感性,甚至有一定的忍耐性,如果將溫度設定值變化范圍短時適度放松,能使溫控負荷提供更大的可調功率。具體應用時如何短時松弛,松弛后會產生何種影響,可作為后續的研究內容。
附錄見本刊網絡版(http://www.epae.cn)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
意林原創版(2016年10期)2016-11-25 10:28:30
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
