基于軌跡聚類的多機場終端區飛行效率研究
2021-03-19 08:43:14李魏何巍巍
交通與港航 2021年1期
關鍵詞:效率
李魏,何巍巍
1航空工業無線電電子研究所,2航空電子系統綜合技術重點實驗室,3民航空管航空電子技術重點實驗室
1 引 言
為應對空中交通量增加帶來的挑戰,美國的NextGen[1]和歐洲的SESAR[2]正在開發新技術和程序。人口密集的大城市通常由兩個或更多的機場提供服務,這些機場地理位置靠近并且共享大部分空域。空域內密集的多條進離場飛行路徑之間相互依賴和相互作用給空中交通管理制造了復雜的環境。
文獻顯示已有大量的工作致力于開發模型算法以進行空域監測,空域設計和空中交通流管理。P.K.Menon等人建立了簡化空中交通流歐拉數學模型[3]。Sun等人對比分析了不同空中交通流模型的特點[4]。Sabhnani等人對飛行軌跡數據應用聚類方法,識別具有高度結構化高空扇區交通流模式,滿足空域重新設計的目標[5]。張洪海等通過廣義跟馳理論初步探討了終端區空中交通流的不同相位問題[6],并對空中交通流基本參數關系進行了仿真分析[7]。上述研究工作多集中在理論建模與仿真層面。本文利用實測飛行軌跡數據,結合聚類算法,提出一種基于重采樣機制的飛行軌跡特征提取方法,通過定義的飛行效率指標,分析了上海多機場終端區空域設計和使用效率,并初步得出飛行效率差異的原因。
2 飛行軌跡特征提取方法
2.1 聚類算法
具有噪聲的基于密度的空間聚類方法(DBSCAN)是一種基于密度的聚類算法[8]。它把具有足夠高密度的區域劃分為簇,并可在有噪聲的樣本中發現任意形狀的簇。它利用參數?,MinPts來描述樣本分布緊密程度。其中,?描述了某一樣本的相鄰范圍的距離閾值,MinPts描述了離某一樣本為 的其他樣本個數閾值。該算法的計算流程如圖1所示。首先從樣本集合D中任意選取一個未被訪問樣本Si,根據輸入參數?和MinPts,確定Si是否為核心對象,如果是則生成一個新類別C,搜索領域集合N?(Si)中的所有未分類的樣本,并重復相同的過程,直到所有樣本都被搜索到。否則,將不符合核心對象和邊界對象條件的樣本標記為噪聲對象,算法訪問集合D中下一個未訪問樣本。
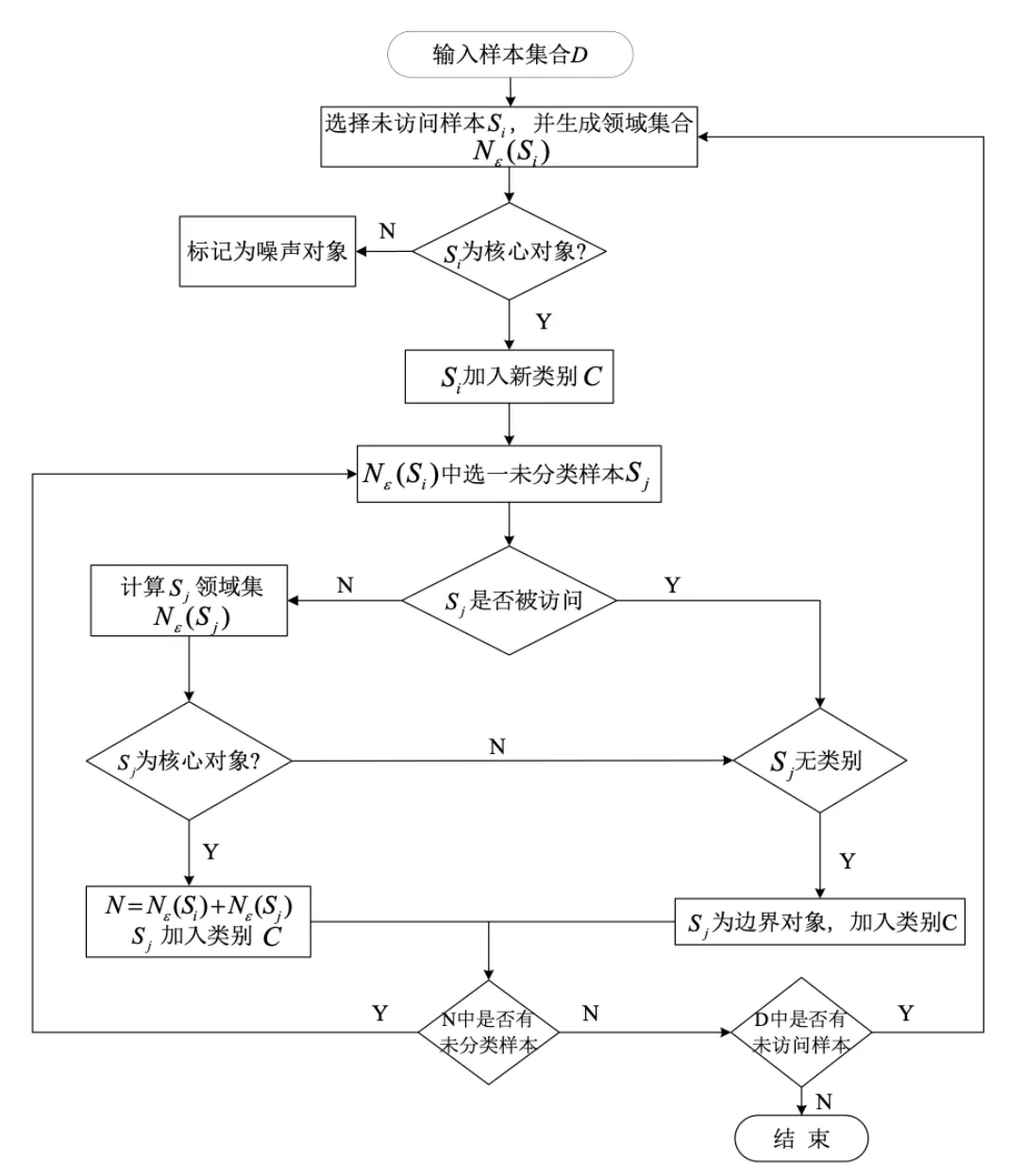
圖1 算法流程圖
2.2 飛行軌跡特征提取流程
本文利用DBSCAN算法,提出了一種飛行軌跡特征提取方法,該方法順序執行如圖2所示的步驟。

圖2 飛行軌跡特征提取流程圖
數據預處理主要包括:裁剪覆蓋所研究區域范圍內的飛行軌跡數據;清理飛行軌跡數據中的離群點、缺失值和冗余值;將WGS-84 坐標系下的經緯度位置數據轉換成笛卡爾坐標系下的以機場為中心點的相對距離數據。
由于飛行的持續時間和傳感器采樣率的不同,不同的飛行軌跡具有不同的采樣時間和數量。而該算法再進行軌跡相似性計算時,要求每條飛行軌跡都具有相同數量的采樣數據。本文采用飛行軌跡數據重采樣方法進行處理:先用插值方法重建每條飛行軌跡,然后對其進行等時間采樣,得到時間上均勻間隔的采樣數據,利用歐幾里得距離計算比較多條飛行軌跡之間的相似性。
DBSCAN算法的計算時間復雜度為O(n2),當軌跡數量較大時,耗費時間較長。本文采用了空間索引技術KD樹對算法進行優化,可將復雜度降低到O(nlog(n))。最后采用輪廓系數[9]對聚類結果進行定量評估。
3 飛行效率評估指標
本節定義一種飛行效率評估指標,通過該指標可以對多機場終端區的飛行效率進行定量評估。飛行效率評估指標其中,Wk是使用第k種典型飛行路徑的飛行軌跡占比,Mk為第k種典型飛行路徑長度與其最短路徑距離差。如果所有Wk取值相等,則該指標反映的是多機場終端區飛行路徑的設計效率。如果Wk取值為不同飛行路徑使用頻率,則該指標反映的是在多機場終端區的飛行效率。
4 上海多機場終端區飛行效率分析
4.1 上海多機場終端區基本情況
上海多機場終端區邊界由無錫—PIKAS—南通—啟東—B11—OPULI—岱山—庵東—南潯—無錫連接組成,規定飛行高度為 6 000 m(含)以下。浦東、虹橋兩機場位于同一終端區內,直線距離45km,共用部分關鍵點,飛行路徑交叉、重疊,運行時相互影響,相互制約。上海兩場跑道基本情況如表1所示。
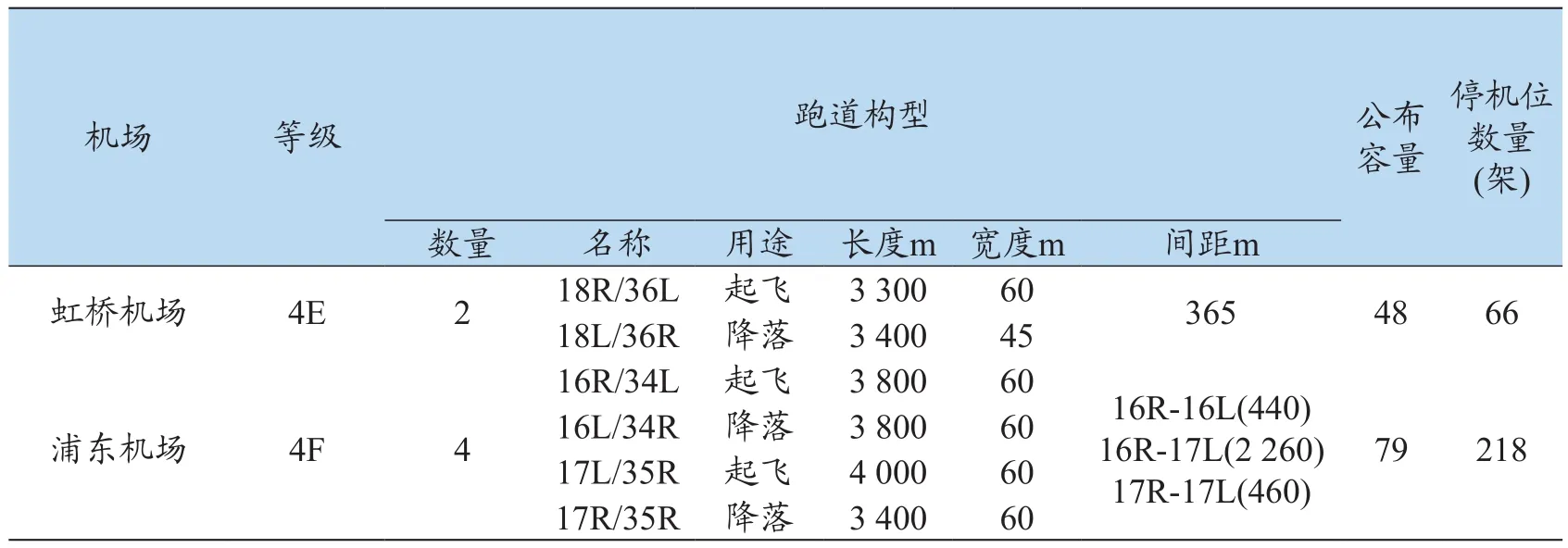
表1 上海兩場跑道基本情況
4.2 飛行軌跡數據
對于飛行軌跡數據的獲取,我們使用了2018年12月1日到12月14日上海多機場終端區廣播式自動相關監視(ADS-B)數據。自動相關監視技術是一種新型監視技術,它依賴于航空電子設備、GPS衛星和地面站網絡。ADS-B系統輸出的數據集包括航空器的航班號、飛機類型、緯度、經度、高度、地速、航向、垂直速度等信息。ADS-B數據說明如表2所示。
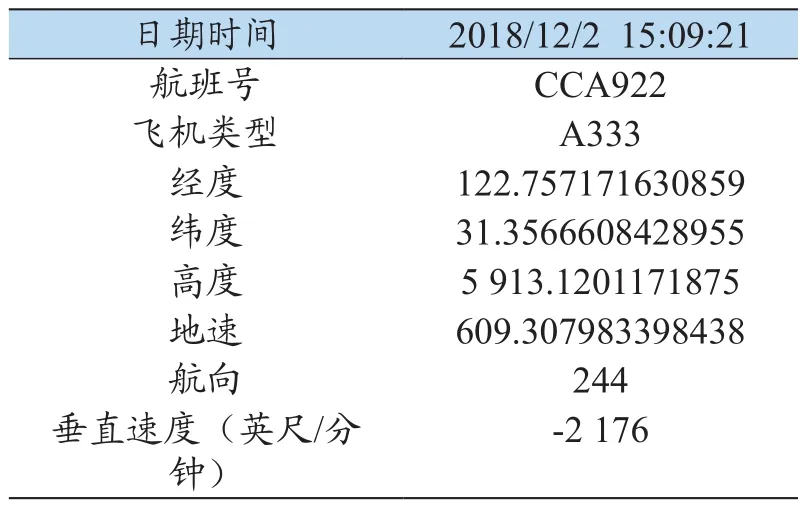
表2 ADS-B數據說明
每條飛行軌跡記錄都由若干個離散時間采樣數據點組成。我們從數據集中刪除異常飛行軌跡數據,同時剔除小于20個數據點的飛行軌跡。處理后的飛行軌跡數量如表3所示。

表3 數據預處理后的上海多機場終端區飛行軌跡數量
對上述每條飛行軌跡進行重新采樣,使每條軌跡的采樣數據個數為50。經過重新采樣的飛行軌跡數據是在時間上均勻間隔的二維空間特征向量。
4.3 上海多機場終端區飛行軌跡特征提取
使用參數?= 550和MinPts= 9運行DBSCAN算法,提取上海多機場終端區飛行軌跡特征。該算法可以在具有噪聲的空間數據庫中發現不同形狀,不同大小的簇類。特別適合在存在異常飛行軌跡的情況下識別核心飛行軌跡模式。參數?反映了聚類飛行軌跡之間相似性(?值越小,軌跡越相似)。MinPts是創建新簇類所需的相似軌跡的最小數量。算法在Matlab中實現,可以使用并行計算和其他編程語言對其進行改進。在常規工作站上,整個計算過程花費了大約6秒。
圖3顯示了2018年12月2日單日上海終端區進場飛行軌跡特征圖及其相應分布比例。每種顏色柱狀圖代表一個族類,黑色表示噪聲族占比。可以看出,當日上海多機場終端區采用了南向運行模式。其中,虹橋機場有兩個主要飛行軌跡模式,其占比均超過35%,浦東機場在一個特定模式中具有低于3%的分布比例。浦東機場具有比虹橋機場更高的噪聲族占比。

圖3 進場飛行軌跡特征圖
使用了2018年12月1日到12月14日的飛行軌跡數據,為上海多機場終端區分別識別出了14條進場飛行路徑和15條離場飛行路徑,如圖4所示。從中可以看出,上海多機場終端區具有復雜空域結構和運行模式。浦東機場西向進場路徑中有兩條路徑與虹橋機場多條進場路徑重疊交叉。同時虹橋機場東向進場路徑中有一條路徑與浦東機場多條進場路徑重疊交叉,且都位于距離機場不遠的位置。對于離場圖,識別出的飛行路徑沖突區域更多。

圖4 進離場飛行路徑
4.4 飛行效率分析
考慮到大部分空中交通管制排序和調度工作都是在終端區域內進場階段進行,因此飛行效率分析的重點是進場階段。使用第三節中的指標對上海多機場終端區飛行效率進行了計算。如圖5上所示,左邊藍色柱狀圖顯示的是等權重計算結果,右邊紅色柱狀圖顯示的是不等權重計算結果。可以看出虹橋機場飛行路徑設計的效率比浦東機場高。但考慮到空域的使用時,浦東機場又比虹橋機場高效。此外,使用第二節提供的方法我們對2018年12月1號到14號上海多機場終端區進場飛行軌跡噪聲族占比進行計算,如圖5下所示。浦東機場不一致進場飛行軌跡比例明顯高于虹橋機場。進一步分析可知不一致進場軌跡分布的差別不僅與空域結構設計以及交通流管理有關,也可能與不利的氣象條件有關。

圖5 飛行效率分析圖
5 研究結論
本文提出一種研究多機場終端區飛行效率的方法和指標。以上海多機場終端區為研究對象,從26 195條實測飛行軌跡數據中,確定了29條進離場典型飛行路徑。研究結果還指出了虹橋機場和浦東機場在飛行效率方面存在明顯差異。此外,浦東機場在飛行軌跡一致性上呈現出更高的可變性。本文提出方法和指標,有望用于不同的多機場終端區飛行效率的研究中。

猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32