基于方位角和勻速圓周運(yùn)動的單站無源定位算法
2021-03-18 02:33:16任塨曄房善婷
雷達(dá)與對抗 2021年4期
關(guān)鍵詞:卡爾曼濾波
管 軍,任塨曄,房善婷,陸 翔
(中國船舶集團(tuán)有限公司第八研究院,南京 211153)
0 引 言
單站通過對輻射源目標(biāo)發(fā)射的電磁信號進(jìn)行截獲測向,結(jié)合定位算法可實(shí)現(xiàn)對目標(biāo)定位。在無源定位過程中,單站不會向目標(biāo)發(fā)射偵察信號,實(shí)現(xiàn)了自身的電磁隱蔽。另外,運(yùn)動單站在機(jī)動中不斷改變自身的空間位置,降低了被發(fā)現(xiàn)和跟蹤的概率。隨著參數(shù)測量能力和處理能力的提高,單站可以利用測量到的輻射源信號的相位差變化率、多普勒頻率、方位角等數(shù)據(jù)來實(shí)現(xiàn)無源定位[1],但這類定位算法的性能往往受限于測量設(shè)備以及測量結(jié)果的可靠性。考慮到針對輻射源信號的測向結(jié)果可靠性、易獲取性更高,因此研究基于方位角量測的單站無源定位仍具有重要意義。
對目標(biāo)進(jìn)行定位,目標(biāo)的位置、速度等可算作時(shí)變參數(shù),所以針對運(yùn)動目標(biāo)的定位問題實(shí)際上也是狀態(tài)估計(jì)問題[2]。對于輻射源截獲,可獲得的觀測量只有目標(biāo)相對于單站的方位角,不可直接觀測的量有目標(biāo)的位置、速度,因此本文將目標(biāo)的測向結(jié)果作為顯式觀測量,將目標(biāo)的位置作為隱變量,建立起目標(biāo)狀態(tài)方程和量測方程;考慮到量測方程的非線性,采用一種偽線性卡爾曼濾波[3],該濾波算法不依賴初始狀態(tài)和協(xié)方差,且魯棒性較好,濾波發(fā)散情況也得到改善;最后設(shè)計(jì)仿真試驗(yàn),在兩種典型情況下對所提定位算法的有效性和性能進(jìn)行驗(yàn)證。
1 系統(tǒng)模型

(1)
(2)
式中,tm為任意參考時(shí)刻;ti為觀測時(shí)刻;下標(biāo)m、i分別對應(yīng)時(shí)刻tm和ti。

(3)
(4)
(5)
(6)
在ti時(shí)刻,將單站觀測得到的目標(biāo)方位角量測記為βi,且
(7)
式中,tan-1(·)為反正切函數(shù);ni為測角誤差,是滿足獨(dú)立同分布,且均值為0、方差為σ2的高斯隨機(jī)變量。
1.1 狀態(tài)方程和量測方程
(8)

(9)
以單站狀態(tài)Xo為參考值,用X=Xt-Xo=[x,vx,y,vy]T表示目標(biāo)的相對狀態(tài),由式(8)和式(9)可以得到k+1時(shí)刻的離散狀態(tài)方程為
(10)
考慮到量測數(shù)據(jù)只有方位角βk+1,量測方程表達(dá)式如下:
(11)
1.2 卡爾曼濾波
式(11)是非線性的,上述狀態(tài)估計(jì)問題可采用拓展卡爾曼濾波(EKF)或者不敏卡爾曼濾波(UKF)進(jìn)行求解,其中EKF依賴初始狀態(tài)和協(xié)方差,可能出現(xiàn)濾波發(fā)散,UKF雖有較好的穩(wěn)健性,但由于涉及矩陣運(yùn)算,計(jì)算量較大[2]。本文采用文獻(xiàn)[3]提出的偽線性卡爾曼濾波,通過將式(11)變型,得到
式中,εk+1為有效噪聲。
與EKF算法中取βk+1為量測不同,該量測方程中恒以0為量測值,將非線性因素歸入噪聲εk+1中。該方法不依賴初始狀態(tài)和協(xié)方差,且魯棒性較好,濾波發(fā)散情況也得到改善,具體濾波過程總結(jié)如下:
(13)
(14)
(15)
式中,Hk=[sin(βk),0,-cos(βk),0];
(16)
步驟2-5:計(jì)算濾波器增益Gk:
(17)
步驟2-6:更新狀態(tài):
(18)
步驟2-7:更新協(xié)方差:
(19)
1.3 可觀測性條件
單站定位問題的可觀測性是指通過對單站截獲的量測數(shù)據(jù)進(jìn)行某種計(jì)算,能夠確保解出唯一位置結(jié)果。文獻(xiàn)[4]給出一種單站機(jī)動要滿足的必要條件,其表達(dá)式如下:
(20)
式中,上角標(biāo)r表示當(dāng)前量為相對值,即式中相關(guān)坐標(biāo)、速度、加速度是以單站為參考零點(diǎn)的相對值。
由式(20)可知,若單站進(jìn)行勻速直線運(yùn)動,則不滿足該可觀測性條件,因而單站無法在勻速行進(jìn)中對勻速目標(biāo)進(jìn)行定位,定位結(jié)果無法保證唯一性。
2 算 法
本文所提出的基于方位角和勻速圓周運(yùn)動的單站無源定位算法可概括如下,在直角坐標(biāo)系下:
步驟1:在tk時(shí)刻,單站測得勻速運(yùn)動目標(biāo)相對于自身的方位角βk,其中tk=kΔT,k=0,1,2,3,…,ΔT為測量周期;
步驟2:自t0時(shí)刻起,單站以恒定速率vo進(jìn)行勻速圓周運(yùn)動,機(jī)動路線按照如下子步驟進(jìn)行:
步驟2-1:調(diào)整單站初速度方向?yàn)棣?;
步驟2-2:單站作向心加速度大小為a1、方向指向目標(biāo)所在一側(cè)的勻速圓周運(yùn)動,并持續(xù)時(shí)長t1=voθ1/a1,θ1是本段勻速圓周運(yùn)動對應(yīng)的圓心角;
步驟2-3:單站速度方向不變,作向心加速度大小為a2的勻速圓周運(yùn)動,并持續(xù)時(shí)長t2=voθ2/a2,θ2是本段勻速圓周運(yùn)動對應(yīng)的圓心角;
步驟2-4:單站速度方向不變,作向心加速度大小為a3的勻速圓周運(yùn)動,并持續(xù)時(shí)長t3=voθ3/a3,θ3是本段勻速圓周運(yùn)動對應(yīng)的圓心角;
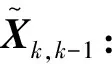
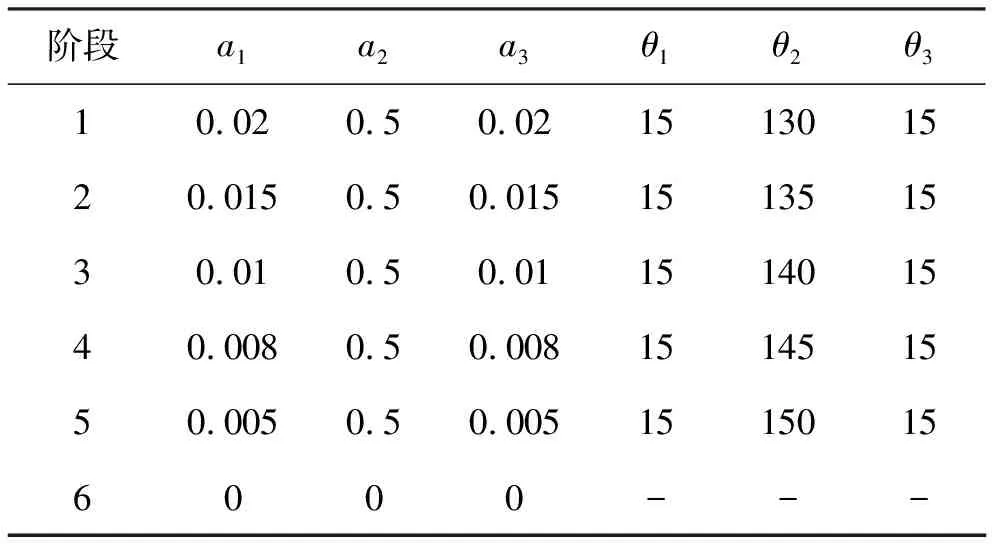
步驟2-5:單站重復(fù)步驟2-2到步驟2-4,直到停止對目標(biāo)定位;其中,α0-θ1-θ2/2=β0;θ3=θ1,且θ1≤30°<θ2,θ1+θ2+θ3≤180°;a3=a1,且a1 通過仿真對本文所述方法的性能進(jìn)行驗(yàn)證。假設(shè)目標(biāo)初始位置為(71,71),單站初始位置為(1,1),單位均為km,輻射源測角誤差標(biāo)準(zhǔn)差為0.53°,采樣間隔Δt取23 s,t0時(shí)刻單站測得的目標(biāo)所在方位為β0。 首先考察目標(biāo)航向與β0方向垂直的情況,假設(shè)目標(biāo)速度7 m/s,航向角為-π/4(以X軸正方向?yàn)?,逆時(shí)針方向遞增);單站速率16 m/s,初始航向α0=θ1+θ2/2+β0,單站機(jī)動參數(shù)如表1所示。 表1 單站勻速圓周運(yùn)動參數(shù) 104次獨(dú)立Monte Carlo試驗(yàn)的仿真結(jié)果如下。圖1給出了單站定位的測距誤差隨觀測時(shí)長的收斂曲線。可以看到,測距誤差曲線整體隨時(shí)長增加而收斂,當(dāng)單站累積觀測20 min時(shí),測距誤差根均方值(RMS)約為4.9 km,測距誤差與單站目標(biāo)之間實(shí)際距離的比值約為4.3%;當(dāng)單站累積觀測40 min時(shí),測距誤差RMS約為6.9 km,測距誤差與單站目標(biāo)之間實(shí)際距離的比值約為6.6%;其中單次仿真試驗(yàn)的定位結(jié)果如圖2所示。 圖1 目標(biāo)航向與β0方向垂直時(shí)的測距誤差曲線 圖2 目標(biāo)航向與β0方向垂直時(shí)的單次定位結(jié)果 進(jìn)一步考察目標(biāo)航向與β0方向平行的情況,假設(shè)目標(biāo)速度7 m/s不變,航向角為π/4;單站機(jī)動參數(shù)同上,104次獨(dú)立Monte Carlo試驗(yàn)的仿真結(jié)果如下。 圖3給出了單站定位的測距誤差隨觀測時(shí)長的收斂曲線,當(dāng)單站累積觀測20 min時(shí),測距誤差RMS約為9.4 km,測距誤差與單站目標(biāo)之間實(shí)際距離的比值約為7.5%;當(dāng)單站累積觀測40 min時(shí),測距誤差RMS約為3.3 km,測距誤差與單站目標(biāo)之間實(shí)際距離的比值約為2.6%;其中單次仿真試驗(yàn)的定位結(jié)果如圖4所示。 圖3 目標(biāo)航向與β0方向平行的測距誤差曲線 圖4 目標(biāo)航向與β0方向平行的單次定位結(jié)果 上述偽線性卡爾曼濾波得到的濾波結(jié)果實(shí)際上是有偏的[5],在單站機(jī)動下,速度估計(jì)結(jié)果是漸進(jìn)無偏的,但距離估計(jì)結(jié)果仍可能是有偏的,因此需要在單站的機(jī)動中使得單站在其與目標(biāo)連線的中垂線方向上產(chǎn)生盡可能大的加速度或角速率,這樣偽線性卡爾曼濾波才可能收斂到一個(gè)無偏解。本文單站機(jī)動方案既考慮到了使單站測得的目標(biāo)角速度較大,也使單站在拐角處的加速度在單站與目標(biāo)連線的中垂線方向上的分量較大,因而上述試驗(yàn)中偽線性卡爾曼濾波收斂到無偏解。 本文提出一種基于方位角和勻速圓周運(yùn)動的單站無源定位算法,單站采取滿足可觀測性條件的多段勻速圓周運(yùn)動,使得單站測得的目標(biāo)角速度較大,也使得單站在拐角處的加速度在單站與目標(biāo)連線的中垂線方向上的分量較大。隨著量測的累加,偽線性卡爾曼濾波的定位精度能夠降至10%以內(nèi)。為進(jìn)一步縮短卡爾曼濾波收斂時(shí)間,后續(xù)研究中可以考慮將多源數(shù)據(jù)如電子偵察目標(biāo)位置數(shù)據(jù)等作為先驗(yàn)信息的單站無源定位方法。
3 仿真分析



4 結(jié)束語
猜你喜歡
測控技術(shù)(2018年11期)2018-12-07 05:49:38
測控技術(shù)(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
